Спосіб управління процесом копання екскаватора
Номер патенту: 96818
Опубліковано: 25.02.2015
Автори: Гурко Олександр Геннадійович, Плахтєєв Павло Анатолійович

Формула / Реферат
Спосіб управління процесом копання екскаватора, що включає послідовні процеси задання бажаного руху робочого обладнання екскаватора за допомогою блока планування траєкторії, визначення поточних значень параметрів руху робочого обладнання за допомогою вимірювального блока, обчислення відхилень значень поточних параметрів руху від бажаних значень блоком обчислення відхилень та корегування управляючих впливів блоком управління за допомогою відповідного алгоритму, який відрізняється тим, що за допомогою блока прогнозу, пов'язаного з блоком обчислення відхилень від бажаної траєкторії та блоком зберігання апріорної інформації про невизначеності, прогнозують вплив невизначених факторів на подальший рух робочого обладнання екскаватора, після чого за допомогою блоків обчислення основного та додаткового управляючих впливів здійснюють процес коригування цих впливів, який розбивається на два паралельних процеси, за допомогою першого з яких визначають основний управляючий вплив за відомою номінальною моделлю, а за допомогою другого - додатковий управляючий вплив, для компенсації спрогнозованого впливу невизначених факторів на рух робочого обладнання екскаватора.
Текст
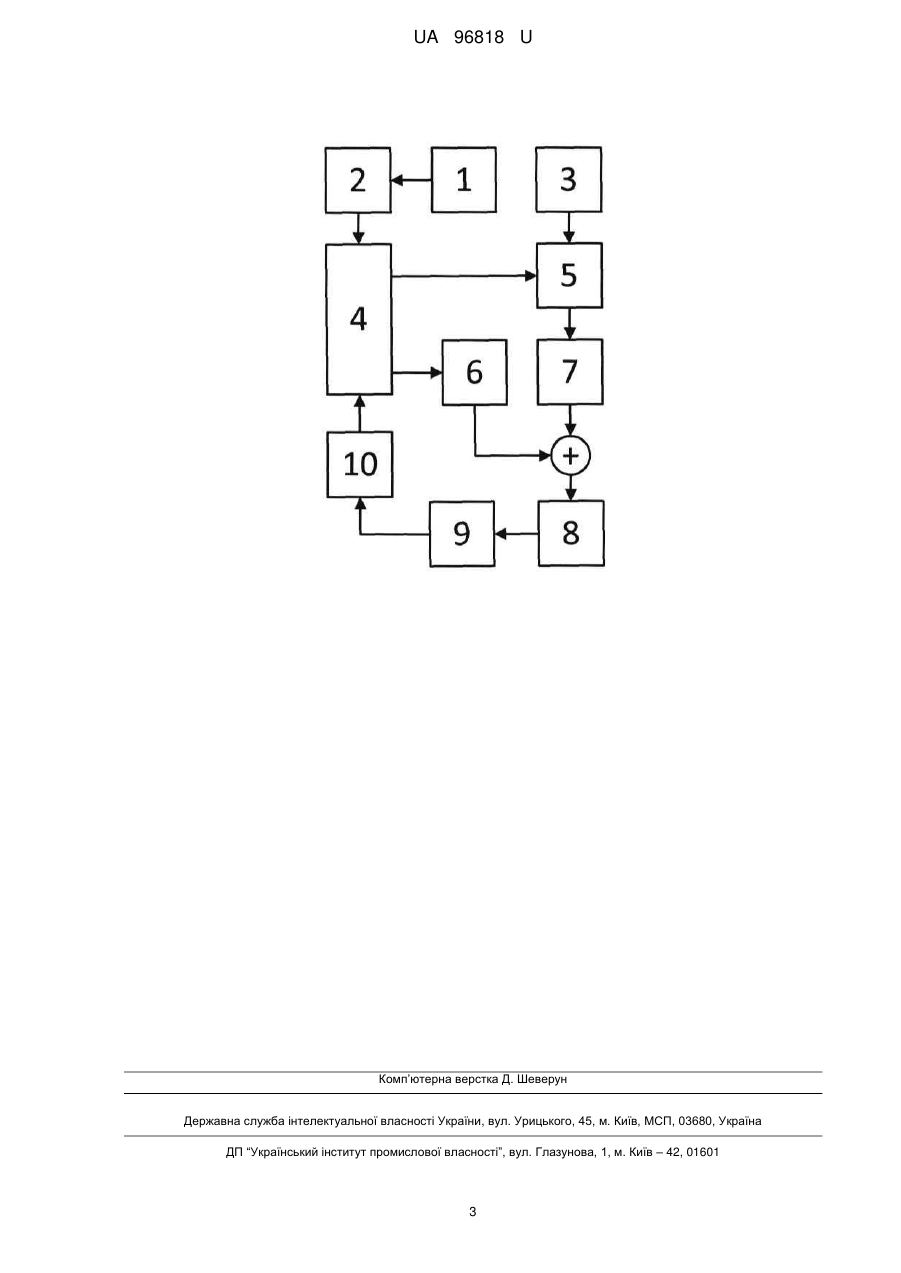
Реферат: Спосіб управління процесом копання екскаватора включає послідовні процеси задання бажаного руху робочого обладнання екскаватора за допомогою блока планування траєкторії, визначення поточних значень параметрів руху робочого обладнання за допомогою вимірювального блока, обчислення відхилень значень поточних параметрів руху від бажаних значень блоком обчислення відхилень та корегування управляючих впливів блоком управління за допомогою відповідного алгоритму. За допомогою блока прогнозу, пов'язаного з блоком обчислення відхилень від бажаної траєкторії та блоком зберігання апріорної інформації про невизначеності, прогнозують вплив невизначених факторів на подальший рух робочого обладнання екскаватора. За допомогою блоків обчислення основного та додаткового управляючих впливів здійснюють процес коригування цих впливів, який розбивається на два паралельних процеси. За допомогою першого процесу визначають основний управляючий вплив за відомою номінальною моделлю. За допомогою другого - додатковий управляючий вплив, для компенсації спрогнозованого впливу невизначених факторів на рух робочого обладнання екскаватора. UA 96818 U (12) UA 96818 U UA 96818 U 5 10 15 20 25 30 35 40 45 50 55 Корисна модель належить до землерийних машин, переважно екскаваторів, і зокрема до управління їх робочим процесом. Землерийні машини, такі як екскаватори та інші, мають робоче обладнання (РО), що складається зі стріли, рукояті та ковша. Один кінець стріли прикріплений з можливістю повороту до землерийної машини, а другий її кінець шарнірно прикріплений до рукояті. Ківш шарнірно прикріплений до вільного кінця рукояті. Кожен з механізмів робочого обладнання приводиться в дію управляючим чином за допомогою щонайменше одного гідравлічного циліндра для зсуву у вертикальній площині. Як правило, оператор маніпулює РО для виконання послідовності певних функцій, які утворюють повний робочий цикл екскавації. Для підвищення продуктивності і якості виконуваних робіт, зниження їх собівартості, а також для забезпечення їх безпеки існує все зростаюча тенденція автоматизувати робочий цикл землерийних машин. Відомі аналоги є система для здійснення автоматичної екскавації і підвищення їх ефективності. Наприклад, в (Способ управления копающим механизмом одноковшевого 7 экскаватора: пат. RU 2211292 Рос. Федерация: МПК E02F009/20 / Е.М. Садовников, Л.А. Антропов, М.Б. Носырев. - № 2001119558/03; заявл. 13.07.2001; опубл. 27.08.2003, Бюл. № 24) розглядається спосіб, що заснований на виборі найбільш раціонального співвідношення поточного значення зусилля на механізмі підйому РО та його швидкості, за рахунок чого підвищується ефективність екскавації. Однак, ефективність екскавації, крім усього іншого, визначається і точністю процесу копання. Корисна модель спрямована на вирішення зазначеної проблеми. Найбільш близьким аналогом до корисної моделі є спосіб управління роботою екскаватора, розглянутий у (Electromechanically controlled excavator and method for controlling the 6 electromechanically controlled excavator: patent EP1835079 Al European Union: MПК E02F3/43, E02F9/20 / Qinghua He. - № 06122458.0; date of filing: 17.10.2006; Date of publication: 19.09.2007, Bulletin 2007/38; priority: 17.03.2006 CN 200610331374). Найближчий аналог включає наступні етапи: 1) задання бажаного руху РО екскаватора; 2) установка параметрів початкової точки руху та генерація за допомогою широтно-імпульсної модуляції (ШІМ) сигналів управління гідравлічними циліндрами відповідних елементів РО; 3) отримання інформації про положення елементів робочого обладнання з використанням датчиків кута, встановлених на стрілі, рукояті і ковші екскаватора відповідно, інформація від яких передається в блок управління рухом, в якому отримана інформація про положення елементів РО порівнюється з попередньо заданими бажаними значеннями і де управляючі дії коригуються в реальному часі за допомогою застосування адаптивного пропорційноінтегрально-диференціального (ПІД) алгоритму, перетворюються в ШІМ- сигнал, і, таким чином, здійснюється управління рухом елементів робочого обладнання; 4) повторення етапу 3 для управління рухом РО уздовж всієї заданої траєкторії. Реалізація зазначеного вище способу дозволяє досягти автоматичного управління процесом копання за заданою траєкторією. Проте, існуючі алгоритми адаптації параметрів ПІД-регулятора або надзвичайно складні, або забезпечують низьку швидкість адаптації (Денисенко В. ПИД-регуляторы вопросы реализации. Ч. 2. Расчёт параметров регулятора //Современные технологии автоматизации. 2008. - №. 1. - С. 86-99.) та не ефективні при швидкій зміні параметрів об'єкта і зовнішніхзбурень, що звичайно має місце при роботі екскаватора. В основу корисної моделі поставлена задача вдосконалення процесу копання екскаватором шляхом підвищення його точності за рахунок зниження впливу невідомих і змінних параметрів екскаватора і зовнішнього середовища на рух РО екскаватора. Поставлена задача вирішується тим, що у спосіб включає процеси визначення бажаних параметрів руху елементів РО екскаватора, наприклад, кутів повороту, їх швидкостей і прискорень, визначення поточних координат та інших параметрів руху РО для обчислення їх відхилень від бажаних значень і коригування управляючих впливів за допомогою відповідного алгоритму, згідно з корисною моделлю, процес коригування управляючих впливів розбивається на два паралельні процеси, перший з яких визначає управляючий вплив за відомою номінальною моделлю, а другий - додатковий управляючий вплив, який призначений компенсувати дію на рух РО невизначених факторів. Корисна модель пояснюється кресленням, де наведена структурна схема, де 1 - блок планування траєкторії руху зубів ковша; 2 - блок розв'язання оберненої задачі кінематики; 3 блок зберігання апріорної інформації про невизначеності в системі; 4 - блок обчислення відхилень від бажаної траєкторії руху РО; 5 - блок прогнозу ступеня впливу невизначеностей на рух; 6 - блок обчислення основного управляючого впливу; 7 - блок обчислення додаткового 1 UA 96818 U 5 10 15 20 25 30 управляючого впливу; 8 - блок формування ШІМ-сигналу; 9 - виконавчий блок та 10 вимірювальний блок. В блоці 3 зберігається апріорна інформація про оцінки наявних у системі невизначеностей (стосовно масово-інерційних параметрів ланок екскаватора, шумів вимірювань, властивостей ґрунту тощо). Ця інформація може мати, наприклад, інтервальну форму. У залежності від необхідної технологічної операції (наприклад, копання або переміщення ґрунту у відвал або на транспортний засіб) в блоці 1 визначається бажана траєкторія руху зубів ковша екскаватора, яка шляхом розв'язання оберненої задачі кінематики в блоці 2, з урахуванням наявних обмежень, перетворюється в бажані закони зміни кутів повороту, швидкостей і прискорень елементів РО (стріли, рукояті і ковша) екскаватора, що подаються на один з входів блока обчислення відхилень 4. У процесі руху РО дійсні кути повороту його елементів вимірюються блоком 10, інформація від якого подається для аналізу на другий вхід блока 4. У блоці 4 на основі інформації від блока 10 здійснюється обчислення поточних швидкостей і, при необхідності, прискорень руху елементів РО, і знаходяться відхилення поточних параметрів руху від бажаних, визначених у блоці 2. Інформація про відхилення поточних параметрів руху подається в блоки 5 і 6. У блоці 5 на основі даної інформації, а також інформації з блока 3, прогнозується вплив невизначеностей на подальший рух РО; результати цього прогнозу подаються в блок 7. У блоці 6 на основі інформації з блока 4 та інформації про параметри системи обчислюється основний управляючий вплив, при цьому може застосовуватися ПІД, ПД або інший алгоритм. Водночас в блоці 7 на підставі даних від блока 5 обчислюється додатковий управляючий вплив, який покликаний компенсувати дію невизначеностей на рух РО. Після підсумовування основного і додаткового впливів з блоків 6 і 7 у блоці 8 формується ШІМ-сигнал, який подається на виконавчий блок 9, що приводить у рух РО екскаватора. Далі процеси, що протікають в блоках 4-10, повторюються доти, поки мета технологічної операції не буде досягнута або не зміниться завдання в блоці 1. Дії, що виконуються блоками 4-10, виконуються в реальному часі, тим самим здійснюється управління рухом елементів РО екскаватора. Використання процесу обчислення додаткового впливу замість адаптації параметрів ПІДрегулятора підвищує точність процесу копання і спрощує алгоритм функціонування системи управління. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 35 40 45 Спосіб управління процесом копання екскаватора, що включає послідовні процеси задання бажаного руху робочого обладнання екскаватора за допомогою блока планування траєкторії, визначення поточних значень параметрів руху робочого обладнання за допомогою вимірювального блока, обчислення відхилень значень поточних параметрів руху від бажаних значень блоком обчислення відхилень та корегування управляючих впливів блоком управління за допомогою відповідного алгоритму, який відрізняється тим, що за допомогою блока прогнозу, пов'язаного з блоком обчислення відхилень від бажаної траєкторії та блоком зберігання апріорної інформації проневизначеності, прогнозують вплив невизначених факторів на подальший рух робочого обладнання екскаватора, після чого за допомогою блоків обчислення основного та додаткового управляючих впливів здійснюють процес коригування цих впливів, який розбивається на два паралельних процеси, за допомогою першого з яких визначають основний управляючий вплив за відомою номінальною моделлю, а за допомогою другого - додатковий управляючий вплив, для компенсації спрогнозованого впливу невизначених факторів на рух робочого обладнання екскаватора. 2 UA 96818 U Комп’ютерна верстка Д. Шеверун Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
Автори англійськоюHurko Oleksandr Hennadiiovych, Plakhtieiev Pavlo Anatoliiovych
Автори російськоюГурко Александр Геннадиевич, Плахтеев Павел Анатольевич
МПК / Мітки
Мітки: копання, екскаватора, управління, процесом, спосіб
Код посилання
<a href="https://ua.patents.su/5-96818-sposib-upravlinnya-procesom-kopannya-ekskavatora.html" target="_blank" rel="follow" title="База патентів України">Спосіб управління процесом копання екскаватора</a>
Система управління процесом технічної експлуатації
Номер патенту: 73458
Опубліковано: 15.07.2005
Автори: Волошин Ігор Іванович, Блаженний Валерій Іванович, Пустовий Сергій Олексійович, Семон Богдан Йосипович
МПК: G05B 13/00
Мітки: управління, система, процесом, експлуатації, технічної
Формула / Реферат:
Система управління процесом технічної експлуатації, що містить блок формування мети процесу технічної експлуатації, блок управління законом першого каналу, блок управління законом другого каналу, блок закону управління першого каналу, блок закону управління другого каналу, пристрій управління першого каналу, пристрій управління другого каналу, блок зовнішніх факторів, блок процесу технічної експлуатації і об'єкт експлуатації, яка...
Спосіб автоматичного управління процесом випічки хліба
Номер патенту: 75652
Опубліковано: 10.12.2012
Автори: Павлов Артур Іванович, Бабський Олег Витальевич
МПК: A21B 1/00
Мітки: випічки, спосіб, управління, хліба, процесом, автоматичного
Формула / Реферат:
Спосіб автоматичного управління процесом випічки хліба, який включає первинну вологу обробку тістових заготовок за допомогою пари, попередній прогрів тістових заготовок, вимірювання і регулювання температури в окремих зонах печі, вимірювання і регулювання температури толочних газів, вимірювання і регулювання розрідження в топці, який відрізняється тим, що коригують задане значення температури толочних газів пропорційно сумі відхилень...
Пристрій видачі рекомендацій для управління киснево-конверторним процесом виплавки сталі

Номер патенту: 44383
Опубліковано: 15.02.2002
Автори: Сколобанов Анатолій Винидіктович, Коноваленко Віктор Васильович, Васильєв Володимир Іванович, Коваль Петро Миколайович, Каменєв Юрій Сергійович, Мельник Ірина Юріївна
Мітки: процесом, сталі, киснево-конверторним, рекомендацій, управління, видачі, виплавки, пристрій
Формула / Реферат:
Устройство выдачи рекомендаций для управления кислородно-конвертерным процессом выплавки стали, содержащее блок определения времени продувки, соединенный с блоком измерения интенсивности газообразования СО2, первый блок сравнения, соединенный с вторым ключом, второй блок сравнения, соединенный с первым ключом, отличающееся тем, что, с целью повышения качества выходного продукта и экономии энергоматериалов, оно дополнительно содержит...
Спосіб автоматичного управління процесом пастеризації томатного соку
Номер патенту: 53053
Опубліковано: 27.09.2010
Автори: Марченко Євген Володимирович, Степанов Михайло Тимофійович
МПК: A23N 1/00
Мітки: спосіб, автоматичного, процесом, соку, пастеризації, управління, томатного
Формула / Реферат:
Спосіб автоматичного управління процесом пастеризації томатного соку, що включає вимірювання і регулювання температури пастеризації томатного соку в секції пастеризації, вимірювання і регулювання температури охолодження томатного соку в секції охолодження, а також компенсування впливу температури пастеризації в секції пастеризації на температуру охолоджування в секції охолоджування і вплив температури пари на температуру пастеризації, який...
Система управління процесом утримання біологічних об’єктів
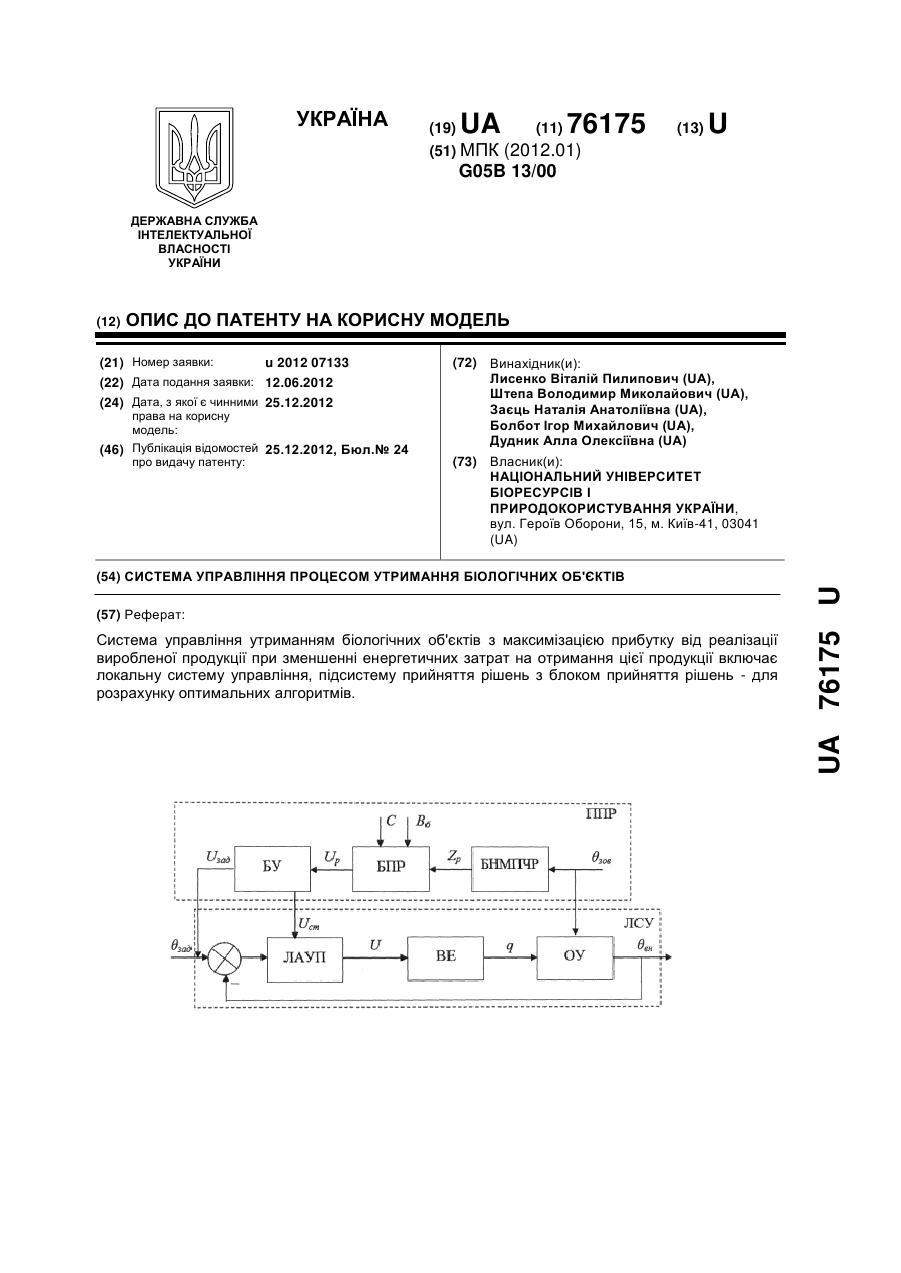
Номер патенту: 76175
Опубліковано: 25.12.2012
Автори: Лисенко Віталій Пилипович, Штепа Володимир Миколайович, Болбот Ігор Михайлович, Заєць Наталія Анатоліївна, Дудник Алла Олексіївна
МПК: G05B 13/00
Мітки: система, процесом, утримання, біологічних, управління, об'єктів
Формула / Реферат:
Система управління утриманням біологічних об'єктів з максимізацією прибутку від реалізації виробленої продукції при зменшенні енергетичних затрат на отримання цієї продукції, що включає локальну систему управління та підсистему прийняття рішень, з блоком прийняття рішень - для розрахунку оптимальних алгоритмів при утриманні біологічних об'єктів, яка відрізняється тим, що підсистема прийняття рішень містить блок нейромережевого прогнозування...
Попередній патент: Роторно-плівковий апарат
Наступний патент: 5,17-ді(арилсульфоніл)уреїдо-11,23-ди-трет-бутил-26,28-дигідрокси-25,27-дипропоксикалікс[4]арени, які виявляють гіпоглікемічну активність
Випадковий патент: Спосіб неруйнівного безконтактного контролю герметичності на основі газорозрядної візуалізації