Система стабілізації безпілотного літального апарата
Номер патенту: 117925
Опубліковано: 10.07.2017
Автори: Фірсов Сергій Миколайович, Вірко Олена Сергіївна, Жежера Іван Володимирович
Формула / Реферат
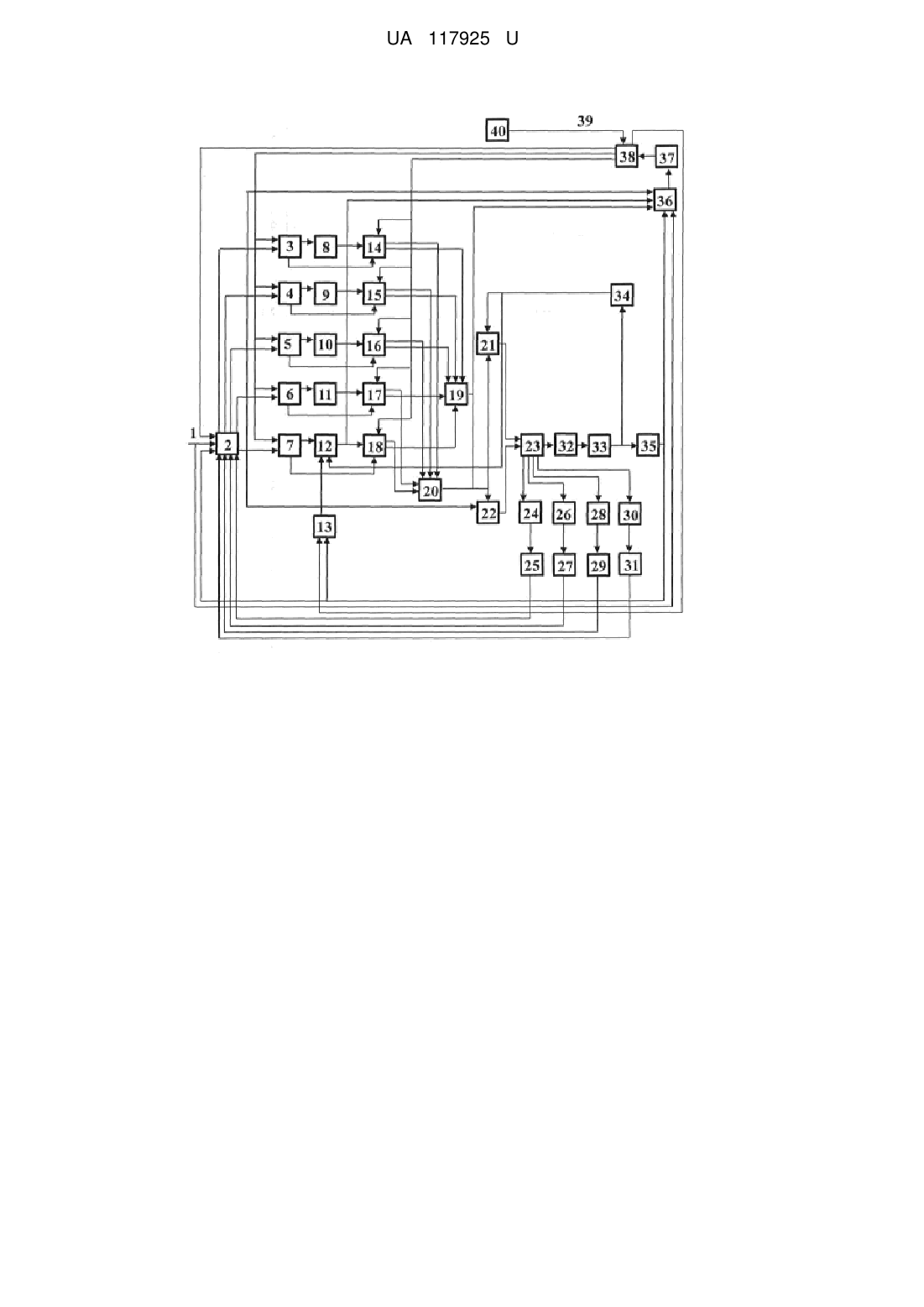
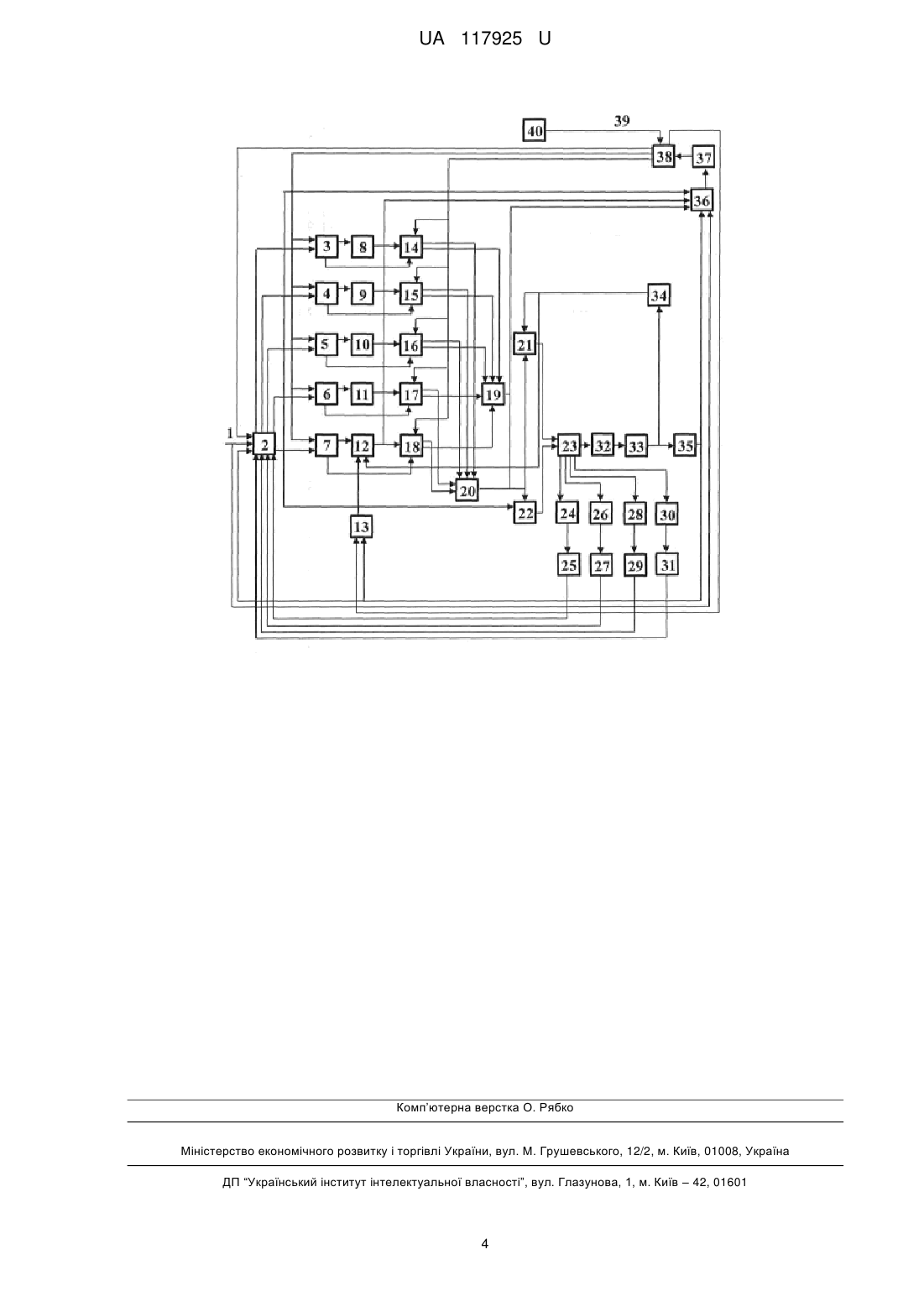
Система стабілізації безпілотного літального апарата, що містить: вхід системи 1, порівнювальний пристрій 2, що має електричний зв'язок з першим входом аналізатора виду аварійної ситуації 36 і через ключ 7 з першим входом пристрою керування 12, вихід якого з'єднаний з другим входом аналізатора виду аварійної ситуації 36 і через ключ 18 з першою інтегруючою ланкою 19, сигнал з якої надходить на третій вхід аналізатора виду аварійної ситуації 36, та другою інтегруючою ланкою 20, виходи яких з'єднані з першим входом блока множення 21, другий вхід якого з'єднаний з виходом датчика кутової швидкості 34, та з другим входом блока множення 22, перший вхід якого з'єднаний з виходом порівнювального пристрою 2, на вхід якого подається задане значення кута курсу, виходи блоків множення 21 та 22 з'єднані з першим та другим входами порівнювача 23, п'ятий вихід якого з'єднаний з входом рульового приводу 32, вихід якого з'єднаний з входом об'єкта керування 33, сигнал з виходу якого подається на датчик кутової швидкості 34 та датчик кута 35, з виходу якого сигнал подається на третій вхід порівнювального пристрою 2, та на четвертий вхід аналізатора виду аварійної ситуації 36, вихід якого з'єднаний з формувачем варіантів парирування 37, з виходу якого сигнал подається на перший вхід блока вибору процедури парирування 38, другий вхід якого через інформаційну шину 39 з'єднаний з блоком алгоритмів парирування відмов 40, з першого виходу блока вибору процедури парирування 38 сигнал подається на перший вхід порівнювального пристрою 2, з другого виходу блока вибору процедури парирування 38 сигнал подається на ключ 7, з третього виходу блока вибору процедури парирування 38 сигнал подається на ключ 18, а з четвертого виходу блока вибору процедури парирування 38 сигнал подається на ключ 13, вихід датчика кута 35 через ключ 13 зв'язаний з другим входом пристрою керування 12, третій вхід якого з'єднаний з виходом датчика кутової швидкості 34, яка відрізняється тим, що в систему додатково введено ключі 3…6, що зв'язують виходи порівнювального пристрою 2 і входи додатково введених пристроїв керування 8…11 відповідно, виходи пристроїв керування 8…11 та другі виходи ключів 3…6 з'єднані з додатково введеними ключами 14…17, що з'єднані першою інтегруючою ланкою 19 та другою інтегруючою ланкою 20, ключі 14…17 з'єднані з третім виходом блока вибору процедури парирування 38, додатково введені ключі 3…6 з'єднані з другим виходом блока вибору процедури парирування 38, об'єкти керування 24, 26, 28, 30, входи яких з'єднані порівнювачем 23, а виходи - з додатково введеними блоками вимірювальних пристроїв 25, 27, 29, 31, виходи яких з'єднані з порівнювальним пристроєм 2.
Текст
Реферат: Система стабілізації безпілотного літального апарата містить: вхід системи, порівнювальний пристрій, що має електричний зв'язок з аналізатором виду аварійної ситуації і через ключ з пристроєм керування, який з'єднаний з аналізатором виду аварійної ситуації і через ключ з першою інтегруючою ланкою, сигнал з якої надходить на аналізатор виду аварійної ситуації, та другою інтегруючою ланкою, з'єднаною з блоком множення, який з'єднаний з датчиком кутової швидкості, та з блоком множення, який з'єднаний з порівнювальним пристроєм, на який подається задане значення кута курсу. Блоки множення з'єднані з порівнювачем, який з'єднаний з рульовим приводом, з'єднаним з об'єктом керування, сигнал з якого подається на датчик кутової швидкості та датчик кута, з якого сигнал подається на порівнювальний пристрій, та на аналізатор виду аварійної ситуації, який з'єднаний з формувачем варіантів парирування, з якого сигнал подається на блок вибору процедури парирування, який через інформаційну шину з'єднаний з блоком алгоритмів парирування відмов. З блока вибору процедури парирування сигнал подається на порівнювальний пристрій, з блока вибору процедури парирування сигнал подається на відповідні ключі. Додатково в систему введено ще чотири ключі, що зв'язують порівнювальний пристрій і додатково введені чотири пристрої керування. Додаткові пристрої керування з'єднані з додатково введеними ще чотирма ключами, що з'єднані першою та другою інтегруючими ланками та з блоком вибору процедури парирування. Перші додатково введені ключі з'єднані з блоком вибору процедури парирування. Об'єкти керування з'єднані з порівнювачем та з додатково введеними блоками вимірювальних пристроїв, що з'єднані з порівнювальним пристроєм. UA 117925 U (54) СИСТЕМА СТАБІЛІЗАЦІЇ БЕЗПІЛОТНОГО ЛІТАЛЬНОГО АПАРАТА UA 117925 U UA 117925 U 5 10 15 20 25 30 35 40 45 50 55 Корисна модель належить до систем управління літальними апаратами. Відома відмовостійка система FTCS, що містить входи системи, виходи системи, входи системи з'єднані з інформаційними входами об'єкта діагностування, об'єкт діагностування, виходи об'єкта діагностування з'єднані з виходами системи [У книзі "Проектирование отказоустойчивых микропроцессорных информационно-измерительных систем". Волочий Б.Ю, и др. - Львов, Вища школа, 1887, рис. 3.5]. Недоліком цієї системи є обмежені функціональні можливості. Відома система стабілізації безпілотного літального апарата, яка містить порівнювальний пристрій, що має електричний зв'язок з першим входом пристрою керування, вихід якого з'єднаний з інтегруючою ланкою, вихід якої з'єднаний з першим входом другого блока множення, другий вхід якого з'єднаний з виходом датчика кутової швидкості, та з другим входом першого блока множення, перший вхід якого з'єднаний з виходом порівнювального пристрою, виходи блоків множення з'єднані з першим та другим входами порівнювача, вихід якого з'єднаний з входом рульового приводу, виходи об'єкта керування з'єднані з датчиком кутової швидкості та датчиком кута, вихід якого з'єднаний з другим входом порівнювального пристрою, аналізатор виду аварійної ситуації, вхід якого з'єднаний з датчиком кута, порівнювальним пристроєм, пристроєм керування, інтегруючою ланкою та входом системи, вихід аналізатора виду аварійної ситуації з'єднаний з формувачем варіантів парирування, вихід якого з'єднаний з першим входом блока вибору процедури парирування, другий вхід якого через інформаційну шину з'єднаний з блоком алгоритмів парирування відмов, а виходи його з'єднані з ключами, резервна інтегруюча ланка, виходи якої з'єднані з першим входом блока множення, другий вхід якого з'єднаний з виходом датчика кутової швидкості [патент України, № 29140, кл. G05D 1/03, опубл. 10.01.2008, бюл. № 1]. Недоліком цієї системи є відсутність відмовостійкості системи стабілізації безпілотного літального апарата при відмовах одного з керуючих приводів, покращення експлуатаційних характеристик та підвищення надійності роботи. Задачею корисної моделі є забезпечення відмовостійкості системи стабілізації безпілотного літального апарата при відмовах одного з керуючих приводів. Рішення поставленої задачі досягається тим, що в систему стабілізації безпілотного літального апарата, яка містить вхід системи, порівнювальний пристрій, що має електричний зв'язок з першим входом аналізатора виду аварійної ситуації і через ключ з першим входом пристрою керування, вихід якого з'єднаний з другим входом аналізатора виду аварійної ситуації і через ключ з першою інтегруючою ланкою, сигнал з якої надходить на третій вхід аналізатора виду аварійної ситуації, та другою інтегруючою ланкою, виходи яких з'єднані з першим входом блока множення, другий вхід якого з'єднаний з виходом датчика кутової швидкості, та з другим входом блока множення, перший вхід якого з'єднаний з виходом порівнювального пристрою, на вхід якого подається задане значення кута курсу, виходи блоків множення з'єднані з першим та другим входами порівнювача, п'ятий вихід якого з'єднаний з входом рульового приводу, вихід якого з'єднаний з входом об'єкта керування, сигнал з виходу якого подається на датчик кутової швидкості та датчик кута, з виходу якого сигнал подається на третій вхід порівнювального пристрою, та на четвертий вхід аналізатора виду аварійної ситуації, вихід якого з'єднаний з формувачем варіантів парирування, з виходу якого сигнал подається на перший вхід блока вибору процедури парирування, другий вхід якого через інформаційну шину з'єднаний з блоком алгоритмів парирування відмов, з першого виходу блока вибору процедури парирування сигнал подається на перший вхід порівнювального пристрою, з другого виходу блока вибору процедури парирування сигнал подається на ключ, з третього виходу блока вибору процедури парирування сигнал подається на ключ, а з четвертого виходу блока вибору процедури парирування сигнал подається на ключ, вихід датчика кута через ключ, зв'язаний з другим входом пристрою керування, третій вхід якого з'єднаний з виходом датчика кутової швидкості, відповідно до корисної моделі в систему додатково введено ключі, що зв'язують виходи порівнювального пристрою і входи додатково введених пристроїв керування відповідно, виходи пристроїв керування та другі виходи ключів з'єднані з додатково введеними ключами, що з'єднані першою інтегруючою ланкою та другою інтегруючою ланкою, ключі з'єднані з третім виходом блоку вибору процедури парирування, додатково введені ключі з'єднані з другим виходом блоку вибору процедури парирування, об'єкти керування, входи яких з'єднані порівнювачем, а виходи з додатково введеними блоками вимірювальних пристроїв, виходи яких з'єднані з порівнювальним пристроєм. Запропоноване технічне рішення пояснюється кресленням, де відображена загальна функціональна схема побудови системи стабілізації безпілотного літального апарата. 1 UA 117925 U 5 10 15 20 25 30 35 40 45 50 55 60 Стійка система стабілізації безпілотного літального апарата містить: вхід системи 1, порівнювальний пристрій 2, що має електричний зв'язок з першим входом аналізатора виду аварійної ситуації 36 і через ключ 7 з першим входом пристрою керування 12, вихід якого з'єднаний з другим входом аналізатора виду аварійної ситуації 36 і через ключ 18 з першою інтегруючою ланкою 19, сигнал з якої надходить на третій вхід аналізатора виду аварійної ситуації 36, та другою інтегруючою ланкою 20, виходи яких з'єднані з першим входом блока множення 21, другий вхід якого з'єднаний з виходом датчика кутової швидкості 34, та з другим входом блока множення 22, перший вхід якого з'єднаний з виходом порівнювального пристрою 2, на вхід якого подається задане значення кута курсу, виходи блоків множення 21 та 22 з'єднані з першим та другим входами порівнювача 23, п'ятий вихід якого з'єднаний з входом рульового приводу 32, вихід якого з'єднаний з входом об'єкта керування 33, сигнал з виходу якого подається на датчик кутової швидкості 34 та датчик кута 35, з виходу якого сигнал подається на третій вхід порівнювального пристрою 2, та на четвертий вхід аналізатора виду аварійної ситуації 36, вихід якого з'єднаний з формувачем варіантів парирування 37, з виходу якого сигнал подається на перший вхід блока вибору процедури парирування 38, другий вхід якого через інформаційну шину 39 з'єднаний з блоком алгоритмів парирування відмов 40, з першого виходу блока вибору процедури парирування 38 сигнал подається на перший вхід порівнювального пристрою 2, з другого виходу блока вибору процедури парирування 38 сигнал подається на ключ 7, з третього виходу блока вибору процедури парирування 38 сигнал подається на ключ 18, а з четвертого виходу блока вибору процедури парирування 38 сигнал подається на ключ 13, вихід датчика кута 35 через ключ 13, зв'язаний з другим входом пристрою керування 12, третій вхід якого з'єднаний з виходом датчика кутової швидкості 34, яка відрізняється тим, що в систему додатково введено ключі 3…6, що зв'язують виходи порівнювального пристрою 2 і входи додатково введених пристроїв керування 8…11 відповідно, виходи пристроїв керування 8…11 та другі виходи ключів 3…6 з'єднані з додатково введеними ключами 14…17, що з'єднані першою інтегруючою ланкою 19 та другою інтегруючою ланкою 20, ключі 14…17 з'єднані з третім виходом блока вибору процедури парирування 38, додатково введені ключі 3…6 з'єднані з другим виходом блока вибору процедури парирування 38, об'єкти керування 24, 26, 28, 30, входи яких з'єднані порівнювачем 23, а виходи з додатково введеними блоками вимірювальних пристроїв 25, 27, 29, 31, виходи яких з'єднані з порівнювальним пристроєм 2. Система стабілізації безпілотного літального апарата працює таким чином: під час польоту на другий вхід порівнювального пристрою 2 подається сигнал про задане значення кута курсу, який порівнюється з сигналом дійсного значення кута курсу, що вимірюється датчиком куту 35 та подається на третій вхід порівнювального пристрою 2. Якщо між цими сигналами є різниця, то сигнал з п'ятого виходу порівнювального пристрою 2 надходить на перший вхід пристрою керування 12 через ключ 7, який у випадку відмови пристрою керування 12 вимикає його з кола і сигнал прямує через ключ 18 на першу інтегруючу ланку 19. Також на другий вхід порівнювального пристрою 2 подається значення ШІМ, пропорційне куту повороту сервомашинки, що порівнюється із сигналами дійсного значення кута відхилення рульової площини, що вимірюється датчиками вигину 25 та подається на сьомий вхід порівнювального пристрою 2, 27, та подається на шостий вхід порівнювального пристрою 2, 29, та подається на п'ятий вхід порівнювального пристрою 2, 31, та подається на четвертий вхід порівнювального пристрою 2. Якщо між сигналами ШІМ та значенням датчика вигину 25 є відмінність, то пристрій керування 11 вимикається з кола через ключ 6. Якщо між сигналами ШІМ та значенням датчика вигину 27 є відмінність, то пристрій керування 10 вимикається з кола через ключ 5. Якщо між сигналами ШІМ та значенням датчика вигину 29 є відмінність, то пристрій керування 9 вимикається з кола через ключ 4. Якщо між сигналами ШІМ та значенням датчика вигину 31 є відмінність, то пристрій керування 8 вимикається з кола через ключ 3. Пристрій керування 12 також приймає сигнал про кутову швидкість курсу від датчика кутової швидкості 34. Ключі 14…18 у випадку відмови інтегруючої ланки 19 підключають до кола резервну інтегруючу ланку 20. При цьому виходи інтегруючих ланок 19 та 20 з'єднані з першим входом блока множення 21, другий вхід якого з'єднаний з виходом датчика кутової швидкості 34, та з другим входом блока множення 22, перший вхід якого з'єднаний з виходом порівнювального пристрою 2. Таким чином інтегруючі ланки 19 та 20 та блоки множення 21, 22 реалізують алгоритм підстроювання коефіцієнтів закону керування та забезпечують інваріантність систем керування до зміни параметрів об'єкта керування. Виходи блоків множення 21 та 22 з'єднані з першим та другим входами порівнювача 23, який видає сигнал на рульовий привід 32, вихід якого з'єднаний з входом об'єкта керування 33, виходами якого є кут курсу та кутова швидкість курсу, що вимірюються датчиком кута 35 та датчиком кутової швидкості 34 відповідно. З виходу датчика 2 UA 117925 U 5 10 15 20 25 30 35 40 45 50 55 кута 35 сигнал подається на четвертий вхід аналізатора виду аварійної ситуації 36, на п'ятий вхід якого подається сигнал про задане значення кута курсу 1. Аналізатор виду аварійної ситуації 36 відповідно до сигналів, що надходять на перший, другий та третій його входи з порівнювального пристрою 2, пристроїв керування 8…12 та інтегруючої ланки 19 відповідно формує інформацію про їх технічний стан, а при наявності відмов - вид аварійної ситуації. Для кожного виду аварійної ситуації формувач варіантів парирування 37 формує множину всіх можливих варіантів парирування конкретної аварійної ситуації на основі існуючих резервних засобів. Інформація про існуючі резервні засоби надходить по інформаційній шині 39 з блока алгоритмів парирування відмов 40. Оптимальна процедура парирування вибирається блоком вибору процедури парирування 38 і для вибраного варіанта проводиться реконфігурація системи: у випадку відмови порівнювального пристрою 2 сигнал датчика кута 35 перемиканням ключа 13 подається на третій вхід пристрою керування 12; у випадку відмови пристрою керування 12 ключ 7 перемикає сигнал на вхід першої інтегруючої ланки 19; при відмові першої інтегруючої ланки 19 ключі 14…18 підключають до кола резервну інтегруючу ланку 20; при відмові сервомашинки, що виконує поворот лівого елерону - об'єкт керування 24 - ключ 6 вимикає його з кола; при відмові сервомашинки, що виконує поворот лівого руля висоти - об'єкт керування 26 - ключ 5 вимикає його з кола; при відмові сервомашинки, що виконує поворот правого руля висоти - об'єкт керування 28 - ключ 4 вимикає його з кола; при відмові сервомашинки, що виконує поворот правого елерону - об'єкт керування 30 - ключ 3 вимикає його з кола. Система, що пропонується, має більш широкі функціональні можливості, оскільки забезпечується відмовостійкість порівнювального пристрою, пристрою керування, інтегруючої ланки та об'єктів керування, що забезпечують управління рухом малого літального апарата. ФОРМУЛА КОРИСНОЇ МОДЕЛІ Система стабілізації безпілотного літального апарата, що містить: вхід системи 1, порівнювальний пристрій 2, що має електричний зв'язок з першим входом аналізатора виду аварійної ситуації 36 і через ключ 7 з першим входом пристрою керування 12, вихід якого з'єднаний з другим входом аналізатора виду аварійної ситуації 36 і через ключ 18 з першою інтегруючою ланкою 19, сигнал з якої надходить на третій вхід аналізатора виду аварійної ситуації 36, та другою інтегруючою ланкою 20, виходи яких з'єднані з першим входом блока множення 21, другий вхід якого з'єднаний з виходом датчика кутової швидкості 34, та з другим входом блока множення 22, перший вхід якого з'єднаний з виходом порівнювального пристрою 2, на вхід якого подається задане значення кута курсу, виходи блоків множення 21 та 22 з'єднані з першим та другим входами порівнювача 23, п'ятий вихід якого з'єднаний з входом рульового приводу 32, вихід якого з'єднаний з входом об'єкта керування 33, сигнал з виходу якого подається на датчик кутової швидкості 34 та датчик кута 35, з виходу якого сигнал подається на третій вхід порівнювального пристрою 2, та на четвертий вхід аналізатора виду аварійної ситуації 36, вихід якого з'єднаний з формувачем варіантів парирування 37, з виходу якого сигнал подається на перший вхід блока вибору процедури парирування 38, другий вхід якого через інформаційну шину 39 з'єднаний з блоком алгоритмів парирування відмов 40, з першого виходу блока вибору процедури парирування 38 сигнал подається на перший вхід порівнювального пристрою 2, з другого виходу блока вибору процедури парирування 38 сигнал подається на ключ 7, з третього виходу блока вибору процедури парирування 38 сигнал подається на ключ 18, а з четвертого виходу блока вибору процедури парирування 38 сигнал подається на ключ 13, вихід датчика кута 35 через ключ 13 зв'язаний з другим входом пристрою керування 12, третій вхід якого з'єднаний з виходом датчика кутової швидкості 34, яка відрізняється тим, що в систему додатково введено ключі 3…6, що зв'язують виходи порівнювального пристрою 2 і входи додатково введених пристроїв керування 8…11 відповідно, виходи пристроїв керування 8…11 та другі виходи ключів 3…6 з'єднані з додатково введеними ключами 14…17, що з'єднані першою інтегруючою ланкою 19 та другою інтегруючою ланкою 20, ключі 14…17 з'єднані з третім виходом блока вибору процедури парирування 38, додатково введені ключі 3…6 з'єднані з другим виходом блока вибору процедури парирування 38, об'єкти керування 24, 26, 28, 30, входи яких з'єднані порівнювачем 23, а виходи - з додатково введеними блоками вимірювальних пристроїв 25, 27, 29, 31, виходи яких з'єднані з порівнювальним пристроєм 2. 3 UA 117925 U Комп’ютерна верстка О. Рябко Міністерство економічного розвитку і торгівлі України, вул. М. Грушевського, 12/2, м. Київ, 01008, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 4
ДивитисяДодаткова інформація
МПК / Мітки
МПК: G05D 3/20
Мітки: стабілізації, безпілотного, літального, система, апарата
Код посилання
<a href="https://ua.patents.su/6-117925-sistema-stabilizaci-bezpilotnogo-litalnogo-aparata.html" target="_blank" rel="follow" title="База патентів України">Система стабілізації безпілотного літального апарата</a>
Система стабілізації безпілотного літального апарата
Номер патенту: 29140
Опубліковано: 10.01.2008
Автори: Литвиненко Денис Володимирович, Симонов Володимир Федорович, Паніна Алла Володимирівна
МПК: G05D 1/03
Мітки: апарата, стабілізації, літального, система, безпілотного
Формула / Реферат:
Система стабілізації безпілотного літального апарата, яка містить порівнювальний пристрій, що має електричний зв'язок з першим входом пристрою керування, вихід якого з'єднаний з інтегруючою ланкою, вихід якої з'єднаний з першим входом другого блока множення, другий вхід якого з'єднаний з виходом датчика кутової швидкості, та з другим входом першого блока множення, перший вхід якого з'єднаний з виходом порівнювального пристрою, виходи блоків...
Система стабілізації бокового каналу безпілотного літального апарата
Номер патенту: 36498
Опубліковано: 27.10.2008
Автори: Амелін Сергій Вікторович, Жалніна Вікторія Василівна, Бондар Катерина Михайлівна
МПК: G05D 1/03
Мітки: стабілізації, безпілотного, апарата, каналу, літального, бокового, система
Формула / Реферат:
Система стабілізації бокового каналу безпілотного літального апарата, що містить перший та другий порівнювальні пристрої, електронні ключі, сервопривід, вихід якого з'єднаний з входом об'єкта керування, а вхід - з виходом першого блока формування керуючих сигналів, датчик кута та датчик кутової швидкості, які послідовно з'єднані з виходами об'єкта керування, яка відрізняється тим, що до її складу введені нормуючі підсилювачі, входи яких...
Адаптивна система кутової стабілізації безпілотного літального апарата
Номер патенту: 35826
Опубліковано: 10.10.2008
Автори: Амеліна Ірина Вікторівна, Симонов Володимир Федорович, Бандура Іван Миколайович
МПК: G05D 1/03, B64C 13/00
Мітки: система, безпілотного, стабілізації, апарата, літального, адаптивна, кутової
Формула / Реферат:
Адаптивна система кутової стабілізації безпілотного літального апарата, що містить порівнювальний пристрій, перший суматор, підсилювач, датчик кута, датчик кутової швидкості, обчислювач, до складу якого входять блок вибору нелінійності, перший і другий блоки керування, блок формування керуючих сигналів, другий суматор та перший електронний ключ та фільтр, до складу якого входять компаратор, тригер, елемент затримки, обмежувач рівня сигналу,...
Система стабілізації безпілотного літального апарата

Номер патенту: 11981
Опубліковано: 16.01.2006
Автори: Бандура Іван Миколайович, Величко Надія Вікторівна, Симонов Володимир Федорович
МПК: B64C 13/00, G05D 1/03
Мітки: літального, система, апарата, безпілотного, стабілізації
Формула / Реферат:
Система стабілізації безпілотного літального апарата, що містить порівнювальний пристрій, датчики кута та кутової швидкості, пристрій керування, перший та другий блоки множення, порівнювач та рульовий привід, яка відрізняється тим, що до неї введена інтегруюча ланка, входом якої є вихід пристрою керування, а її вихід з'єднаний з другим входом першого блока множення та з першим входом другого блока множення.
Система стабілізації безпілотного літального апарата

Номер патенту: 11582
Опубліковано: 16.01.2006
Автори: Амелін Сергій Вікторович, Бандура Іван Миколайович, Антошик Вікторія Миколаївна, Симонов Володимир Федорович
МПК: G05D 1/03, B64C 13/00
Мітки: апарата, літального, система, стабілізації, безпілотного
Формула / Реферат:
1. Система стабілізації безпілотного літального апарата, що містить порівнювальний пристрій, суматор, підсилювач, рульовий привід та датчики кута тангажа та кутової швидкості тангажа, яка відрізняється тим, що в неї введено обчислювач, з'єднаний з виходом суматора та входом рульового приводу об'єкта управління, і фільтр, з'єднаний з виходом датчика кута тангажа і порівнювальним пристроєм.2. Система стабілізації безпілотного літального...
Попередній патент: Формувач періодичної двофазної послідовності імпульсів типу меандр з програмованою тривалістю
Наступний патент: Спосіб лікування хронічного ерозивного гастродуоденіту в дітей
Випадковий патент: Спосіб знеболювання постраждалих з травматичною хворобою