Промисловий робот-пучок
Номер патенту: 120093
Опубліковано: 25.10.2017
Автори: Амбарцумянц Карен Робертович, Амбарцумянц Роберт Вачаганович
Формула / Реферат
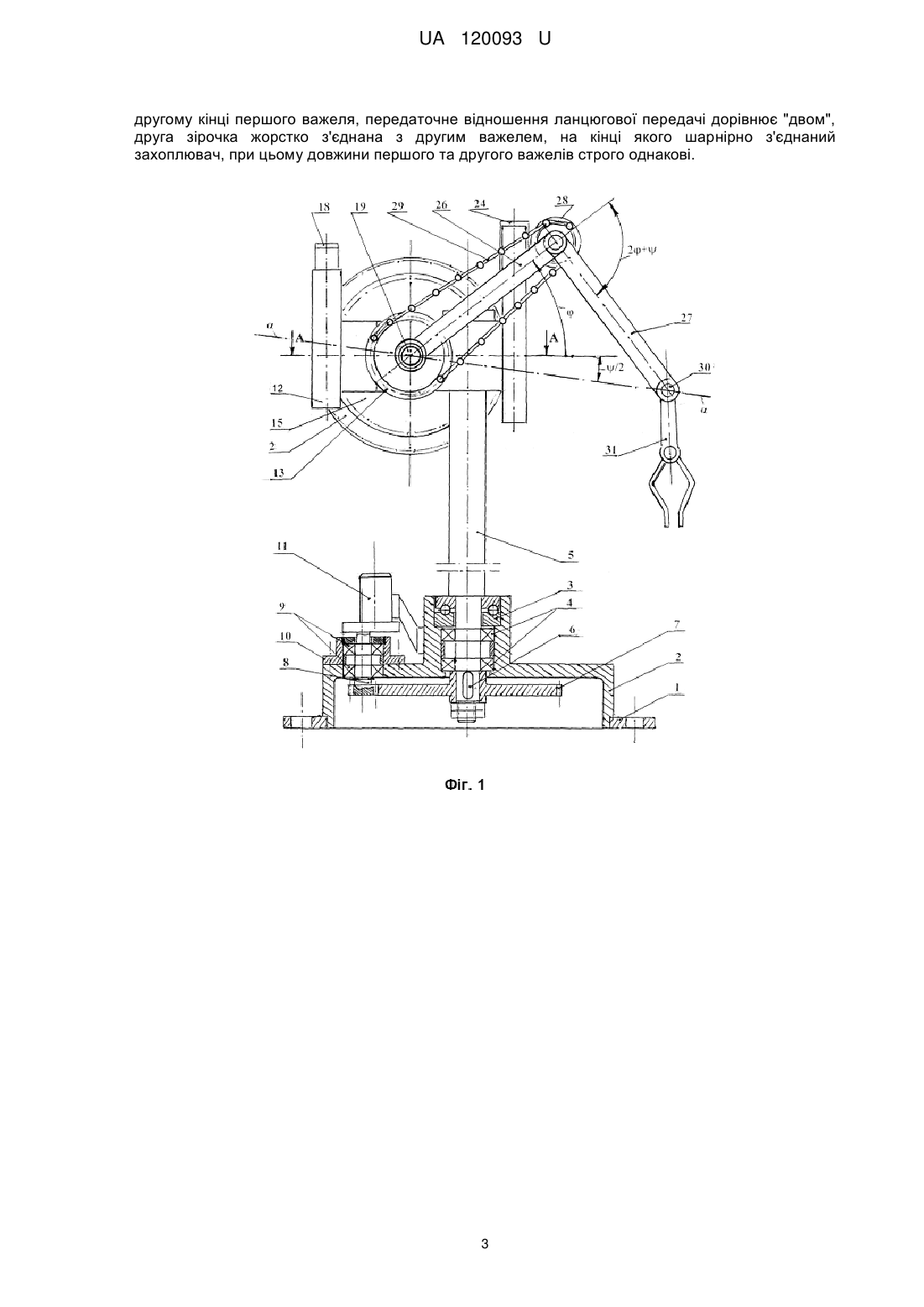
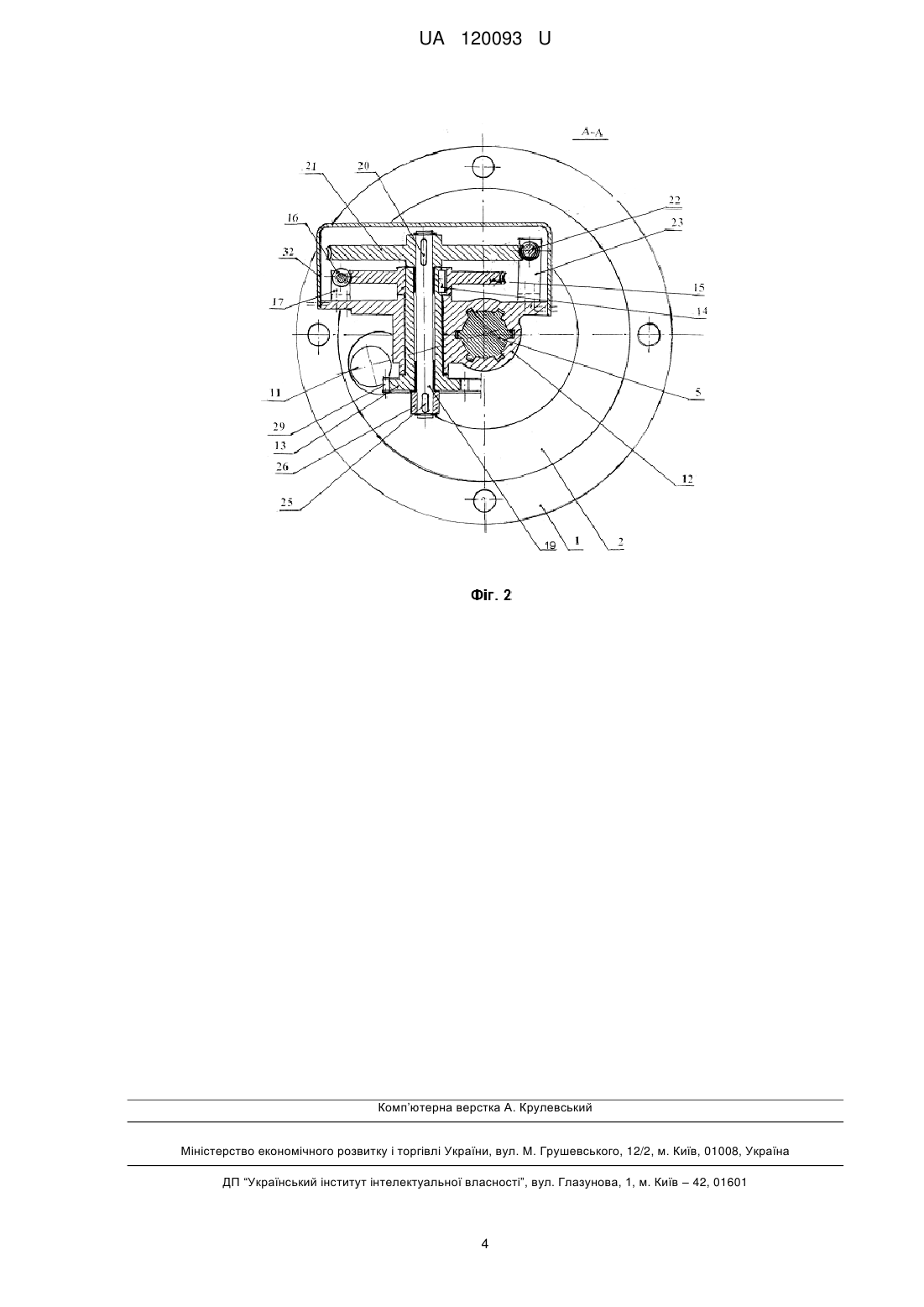
Промисловий робот-пучок, що містить основу з корпусом, механізм повороту, черв'ячну передачу, вертикальний вал, який рухомо встановлений у корпусі, циліндричну зубчату передачу, захоплювач, який відрізняється тим, що на верхньому кінці вертикального вала через шліци установлений додатковий корпус, на якому рухомо установлена перша зірочка з маточиною, на маточині через шпонку або шліци установлено перше черв'ячне колесо, яке зачеплене з першим черв'яком, рухомо установленим у додатковому корпусі, усередині маточини першої зірочки рухомо та співвісно установлений ведучий вал, на якому з одного боку співвісно установлений перший важіль, а з другого боку через шпонку або шліци установлено друге черв'ячне колесо, яке зачеплено з другим черв'яком, рухомо установленим у додатковому корпусі, перша зірочка через ланцюг сполучена з другою зірочкою, рухомо установленою на другому кінці першого важеля, передаточне відношення ланцюгової передачі дорівнює "двом", друга зірочка жорстко з'єднана з другим важелем, на кінці якого шарнірно з'єднаний захоплювач, при цьому довжини першого та другого важелів строго однакові.
Текст
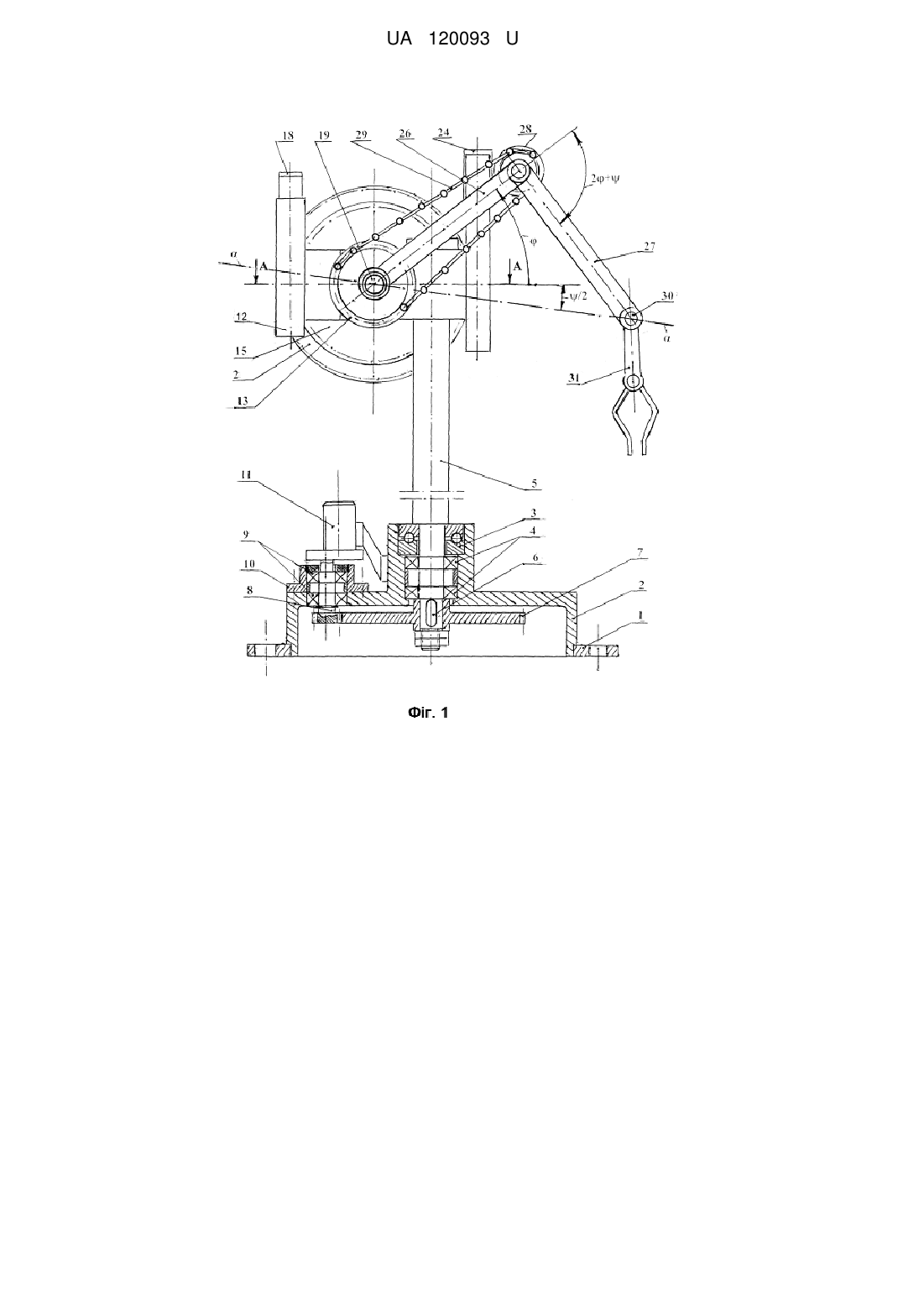
Реферат: UA 120093 U UA 120093 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до галузі машинобудування, зокрема конструкцій промислових роботів (ПР) для вантажно-розвантажувальних та інших робіт. Відомим аналогом є конструкція промислового робота (ПР) для координатного позиціонування при виконанні вантажно-розвантажувальних робіт (див., наприклад, авт. св. SU №1148776. Бюл. №13 від 07.04.1985г.). ПР містить основу, обертальний, навколо вертикальної осі, корпус та установлений на нього пантограф, силовий циліндр та циліндр для приводу захоплювача, штоки, які сполучені із пантографом. Головним недоліком аналога є невелика робоча зона, що знижує його функціональні можливості. Найближчим аналогом до корисної моделі , що заявляється, є ПР типу МП-4 (див., наприклад, Ю. Г. Козырев. Промышленные роботы: Справочник. - 2-е изд. Перераб. и доп. - М.: Машиностроение, 1988. С.116, рис.23). ПР МП-4 містить основу та корпус, вертикальний вал, який рухомо установлений у корпусі, механізм підняття, механізм повороту, черв'ячну передачу, захоплювач. Поворот виконується за допомогою мотор-редуктора через зубчату передачу, яка обертає вертикальний вал, на якому жорстко закріплений барабан. На зовнішній стороні барабана виконані зубці. Механізм підняття складається з електродвигуна, який через черв'ячну і рейкову передачі з барабаном передає рух до його вала і таким чином захоплювач переміщається у вертикальному напрямку. У повздовжньому напрямку захоплювач переміщається за допомогою другого електродвигуна через другу рейкову передачу. Конструкція даного ПР МП-4 вибрана найближчим аналогом. Найближчий аналог та корисна модель, мають такі спільні ознаки: - основа з корпусом; - механізм повороту; - черв'ячна передача; - вертикальний вал, який рухомо установлений у корпусі; - механізм підняття; - циліндрична зубчата передача; - захоплювач. Конструкція найближчого аналога має ряд недоліків. 1. Складність зубчатих передач для переміщення захоплювача як у вертикальному, так і горизонтальному напрямках, що призводить до збільшення мертвого ходу та зменшує точність позиціювання захоплювача. 2. Наявність поступальних кінематичних пар, що призводить до збільшення енерговитрат та зменшує надійність і довговічність роботи в цілому. 3. Обмежена робоча зона захоплювача, через те, що її збільшення призводить до складності конструкції промислового робота в цілому та зменшення надійності і довговічності роботи. В основу корисної моделі поставлена задача створити удосконалену конструкцію, промислового робота-пучка, задачею якої є збільшення робочої зони обслуговування, коефіцієнта сервісу, спрощення конструкції приводів горизонтального і вертикального переміщення захоплювача, виключення поступальних кінематичних пар, що підвищує коефіцієнт корисної дії, точність позиціювання ПР та надійність і довговічність роботи. Поставлена задача вирішується тим, що конструкція промислового робота-пучка, містить основу з корпусом, механізм повороту, черв'ячну передачу, вертикальний вал, який рухомо установлений у корпусі, циліндричну зубчату передачу, захоплювач, згідно з корисною моделлю, на верхньому кінці вертикального вала через шліци установлений додатковий корпус, на якому рухомо установлена перша зірочка з маточиною, на маточині за допомогою шпонки або шліців установлено перше черв'ячне колесо, яке зачеплене з першим черв'яком, рухомо установленим у додатковому корпусі, усередині маточини першої зірочки рухомо та співвісно установлений ведучий вал, на якому з одного боку співвісно установлений перший важіль, а з другого боку, через шпонку або шліци, установлено друге черв'ячне колесо, яке зачеплено із другим черв'яком, рухомо установленим у додатковому корпусі, перша зірочка через ланцюг сполучена з другою зірочкою, рухомо установленою на другому кінці першого важеля, передаточне відношення ланцюгової передачі дорівнює «двом», друга зірочка жорстко з'єднана з другим важелем, на кінці якого шарнірно з'єднаний захоплювач, при цьому довжини першого та другого важелів строго однакові. Корисна модель пояснюється кресленнями, де: фіг. 1. - фронтальний вигляд ПР-пучка з місцевим перерізом в основі, фіг.2. - вигляд перерізу А-А по фіг. 1. ПР-пучок складається з основи 1 з корпусом 2 (фіг.1). У корпусі 2 за допомогою упорного 3 і упорно-радіальних підшипників 4 установлений один кінець ведучого вал 5. Усередині корпусу 2 1 UA 120093 U 5 10 15 20 25 30 35 40 45 на ведучому валу 5, співвісно з ним, через шпонку 6, жорстко закріплено циліндричне зубчате колесо 7, яке зачеплене з вал-шестірнею 8. Вал-шестірня 8 за допомогою підшипників кочення 9 установлена на втулці з фланцем 10, яка жорстко закріплена на корпусі 2. Вал-шестірня 8 з'єднана з мотор-редуктором 11. На другому кінці вертикального вала 5 через шліци установлений додатковий корпус 12 (фіг. 1, 2). У додатковому корпусі 12, перпендикулярно до поздовжньої осі вертикального вала 5, рухомо установлена перша зірочка 13 з маточиною. На кінці маточини першої зірочки 13 через шпонку 14 установлено перше черв'ячне колесо 15, яке зачеплене з першим черв'яком 16. Перший черв'як 16 за допомогою опорів 17 установлений на додатковому корпусі 12. Черв'як 16 сполучений з електродвигуном 18, який установлений нерухомо на додатковому корпусі 12. Усередині маточини першої зірочки 13 рухомо установлений ведучий вал 19. На одному кінці ведучого вала 19 через шпонку 20 установлено друге черв'ячне колесо 21, яке зачеплене з другим черв'яком 22. Другий черв'як 22 за допомогою опорів 23 установлений на додатковому корпусі 12 і сполучений з електродвигуном 24 (фіг. 1). На другому кінці ведучого вала 19 через шпонку 25, співвісно з першою зірочкою 13, одним кінцем установлений перший важіль 26 (фіг. 1). На другому кінці першого важеля 26 рухомо установлена друга зірочка 28. Співвісно з другою зірочкою 28 сполучений другий важіль 27. Довжини важелів 26 та 27 строго однакові. Перша 13 і друга 28 зірочки сполучені між собою ланцюгом 29. Передаточне відношення від першої 13 до другої 28 зірочок дорівнює «двом». На кінці другого важеля 27 за допомогою пальця 30 закріплений захоплювач 31. Для забезпечення умови техніки безпеки черв'ячні передачі закриті кожухом 32. Корисна модель працює наступним чином. Від мотор-редуктора 11 обертальний рух передається вал-шестірні 8 і від неї циліндричному зубчатому колесу 7 (фіг.1). Від циліндричного зубчатого колеса 7 рух передається до вертикального вала 5 і від нього, через шліци - додатковому корпусу 12, який в свою чергу обертає систему важелів 26, 27 із захоплювачем 31. Горизонтальне переміщення центра пальця 30, де установлений захоплювач 31, виконується, коли перша зірочка 13 нерухома. Обертається перший важіль 26 і він рух отримує від електродвигуна 24 через черв'ячну передачу 22-21. Згідно з властивістю важільно-ланцюгової передачі (патент України на корисну модель №104104. Бюл. № 1 від 12.01.2016) центр пальця 30 переміщається по прямій -, яка проходить через центр ведучого вала 19. Вертикальне переміщення центра пальця 30 забезпечується одночасною роботою електродвигунів 24 та 18. Для одночасного вертикального та горизонтального переміщення центра пальця 30 (нахильна пряма) через черв'ячну передачу 16-15 повертається на потрібний кут перша зірочка 13. Коли кут обертання першого важеля 26 є , то відносний кут між важелями 26 і 27 дорівнює 2+. Через то, що важелі утворюють трикутник, сторони яких між собою рівні, то пряма лінія - обертається на кут //2 (фіг. 1). Таким чином, шляхом повороту і фіксації положення першої зірочки 13 можна змінити значення кута в межах від нуля до 360° і одержувати пучок прямих ліній, по яких переміщається центр пальця 30. Максимальна довжина прямої лінії - в час обертання першого важеля 26 на кут 180°, дорівнює чотирьом довжинам першого важеля 26. У корисній моделі відсутні поступальні кінематичні пари, зменшена кількість зубчатих передач, центр закріплення захоплювача може переміщатися як горизонтально, так і вертикально, а також під будь-якими похилим або прямим (кутом в межах 0-360°) відносно ведучого вала, забезпечена велика робоча зона, внаслідок того, що довжина прямолінійного переміщення центра закріплення захоплювача дорівнює чотирьом довжинам першого важеля, високий коефіцієнт корисної дії, через то, що відсутні поступальні кінематичні пари та зменшена кількість зубчатих передач, що у цілому забезпечує також надійність і довговічність роботи. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 50 55 60 Промисловий робот-пучок, що містить основу з корпусом, механізм повороту, черв'ячну передачу, вертикальний вал, який рухомо встановлений у корпусі, циліндричну зубчату передачу, захоплювач, який відрізняється тим, що на верхньому кінці вертикального вала через шліци установлений додатковий корпус, на якому рухомо установлена перша зірочка з маточиною, на маточині через шпонку або шліци установлено перше черв'ячне колесо, яке зачеплене з першим черв'яком, рухомо установленим у додатковому корпусі, усередині маточини першої зірочки рухомо та співвісно установлений ведучий вал, на якому з одного боку співвісно установлений перший важіль, а з другого боку через шпонку або шліци установлено друге черв'ячне колесо, яке зачеплено з другим черв'яком, рухомо установленим у додатковому корпусі, перша зірочка через ланцюг сполучена з другою зірочкою, рухомо установленою на 2 UA 120093 U другому кінці першого важеля, передаточне відношення ланцюгової передачі дорівнює "двом", друга зірочка жорстко з'єднана з другим важелем, на кінці якого шарнірно з'єднаний захоплювач, при цьому довжини першого та другого важелів строго однакові. 3 UA 120093 U Комп’ютерна верстка А. Крулевський Міністерство економічного розвитку і торгівлі України, вул. М. Грушевського, 12/2, м. Київ, 01008, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 4
ДивитисяДодаткова інформація
МПК / Мітки
МПК: B25J 1/06
Мітки: робот-пучок, промисловий
Код посилання
<a href="https://ua.patents.su/6-120093-promislovijj-robot-puchok.html" target="_blank" rel="follow" title="База патентів України">Промисловий робот-пучок</a>
Промисловий робот-пантограф

Номер патенту: 115724
Опубліковано: 25.04.2017
Автори: Єгоров Віктор Богданович, Амбарцумянц Роберт Вачаганович
МПК: B25J 1/06
Мітки: промисловий, робот-пантограф
Формула / Реферат:
Промисловий робот-пантограф, що містить корпус, повзун вертикального переміщення платформи, повзун горизонтального переміщення платформи, каретку вертикального переміщення платформи, каретку горизонтального переміщення платформи і механізм пантографа, який відрізняється тим, що каретка горизонтального переміщення платформи виконана у вигляді двох гладких суцільних циліндрів, які установлені нерухомо на двох опорах так, що їх горизонтальні...
Промисловий робот
Номер патенту: 24123
Опубліковано: 31.08.1998
Автор: Баньковський Петро Андрійович
МПК: B25J 1/00
Мітки: промисловий, робот
Формула / Реферат:
Промышленный робот, содержащий руку, состоящую из платформ треугольной формы, каждая из которых связана с соседней платформой посредством трех приводов линейного перемещения, шарнирно установленных на этих платформах, а также расположенный на крайней платформе руки схват, в корпусе которого установлен привод перемещения его губок, отличающийся тем, что, с целью расширения технологических возможностей за счет увеличения рабочей зоны,...
Промисловий робот
Номер патенту: 27488
Опубліковано: 15.09.2000
Автор: Малетті Енріко
МПК: B25J 9/10, B21D 43/04
Мітки: робот, промисловий
Текст:
...на нём два двигателя с понижающими передачами, соединённые с ними два манипулятора с возможностью вращения вокруг первой и второй осей, причём оси параллельны и расположены на расстоянии одна от другой, два предплечья, шарнирно сочленённые одними концами с манипуляторами с возможностью вращения вокруг третьей и четвёртой осей, параллельных первой и второй осям вращения манипуляторов, и шарнирно сочленённые противоположными концами с...
Промисловий робот
Номер патенту: 67181
Опубліковано: 15.06.2004
Автори: Бергер Еміль Григорович, Осадчий Володимир Степанович, Бергер Євгеній Емильович
МПК: B25J 11/00
Мітки: робот, промисловий
Формула / Реферат:
Промисловий робот, що містить опору, вертикальну і горизонтальну каретки, механічну руку із схватом, виконану у вигляді куліси, і гвинтову пару, гайка якої зв'язана з горизонтальною кареткою, який відрізняється тим, що він обладнаний зв'язаною з горизонтальною кареткою і встановленою в поворотному камені кулісою з профільованим кулачком, який зв'язаний за допомогою штовхача з вертикальною кареткою, при цьому поворотний камінь на важелі, схват...
Піч опалювальна “булер’ян промисловий тип 08″
Номер патенту: 109074
Опубліковано: 10.08.2016
Автор: Дзевіцький Віктор Миколайович
МПК: F24B 7/00
Мітки: опалювальна, піч, булер'ян, тип, промисловий
Формула / Реферат:
1. Піч опалювальна, яка містить металевий корпус з дугоподібних вертикально орієнтованих конвекційних труб, де нижні кінці труб зігнуті назустріч одна одній, перехрещені і утворюють ніжки печі, всередині корпусу піч містить двоярусну топку, регулятор подачі повітря, димову заслінку, димовідвідний патрубок, у передній стінці печі виконаний завантажувальний отвір, перекритий дверцями, а топка печі розділена горизонтальною перегородкою на дві...
Попередній патент: Композиція інгредієнтів для приготування фруктово-овочевої запіканки
Наступний патент: Спосіб біотермічної ферментації органічної маси
Випадковий патент: Вузол завантаження коксом камери сухого гасіння