Промисловий робот-пантограф
Номер патенту: 115724
Опубліковано: 25.04.2017
Автори: Амбарцумянц Роберт Вачаганович, Єгоров Віктор Богданович

Формула / Реферат
Промисловий робот-пантограф, що містить корпус, повзун вертикального переміщення платформи, повзун горизонтального переміщення платформи, каретку вертикального переміщення платформи, каретку горизонтального переміщення платформи і механізм пантографа, який відрізняється тим, що каретка горизонтального переміщення платформи виконана у вигляді двох гладких суцільних циліндрів, які установлені нерухомо на двох опорах так, що їх горизонтальні поздовжні осі знаходяться у горизонтальній площині, опори жорстко закріплені на несучому диску, який в свою чергу співвісно закріплений жорстко та співвісно на валу обертання навколо вертикальної осі, а вал обертання установлений за допомогою упорно-радіальних підшипників у корпусі, на корпусі жорстко та співвісно з валом обертання установлено черв'ячне колесо, яке зачеплене з черв'яком, установленим рухомо на несучому диску, повзун горизонтального переміщення платформи тілами кочення з сепараторами установлений рухомо на горизонтальних гладких суцільних циліндрах і утворює кульково-гвинтове з'єднання з горизонтальним гвинтом, який установлений рухомо на опорах каретки горизонтального переміщення в площині поздовжніх осей двох гладких суцільних циліндрів, каретка вертикального переміщення платформи виконана у вигляді двох вертикальних гладких суцільних циліндрів, жорстко установлених на повзуні горизонтального переміщення платформи, причому на гладких суцільних циліндрах тілами кочення з сепараторами установлений повзун вертикального переміщення платформи, який в свою чергу утворює кульково-гвинтове з'єднання з гвинтом вертикального переміщення платформи, рухомо установленим одним кінцем на повзун горизонтального переміщення платформи, а другим кінцем - на траверсі, жорстко закріпленій на кінцях вертикальних гладких суцільних циліндрів.
Текст
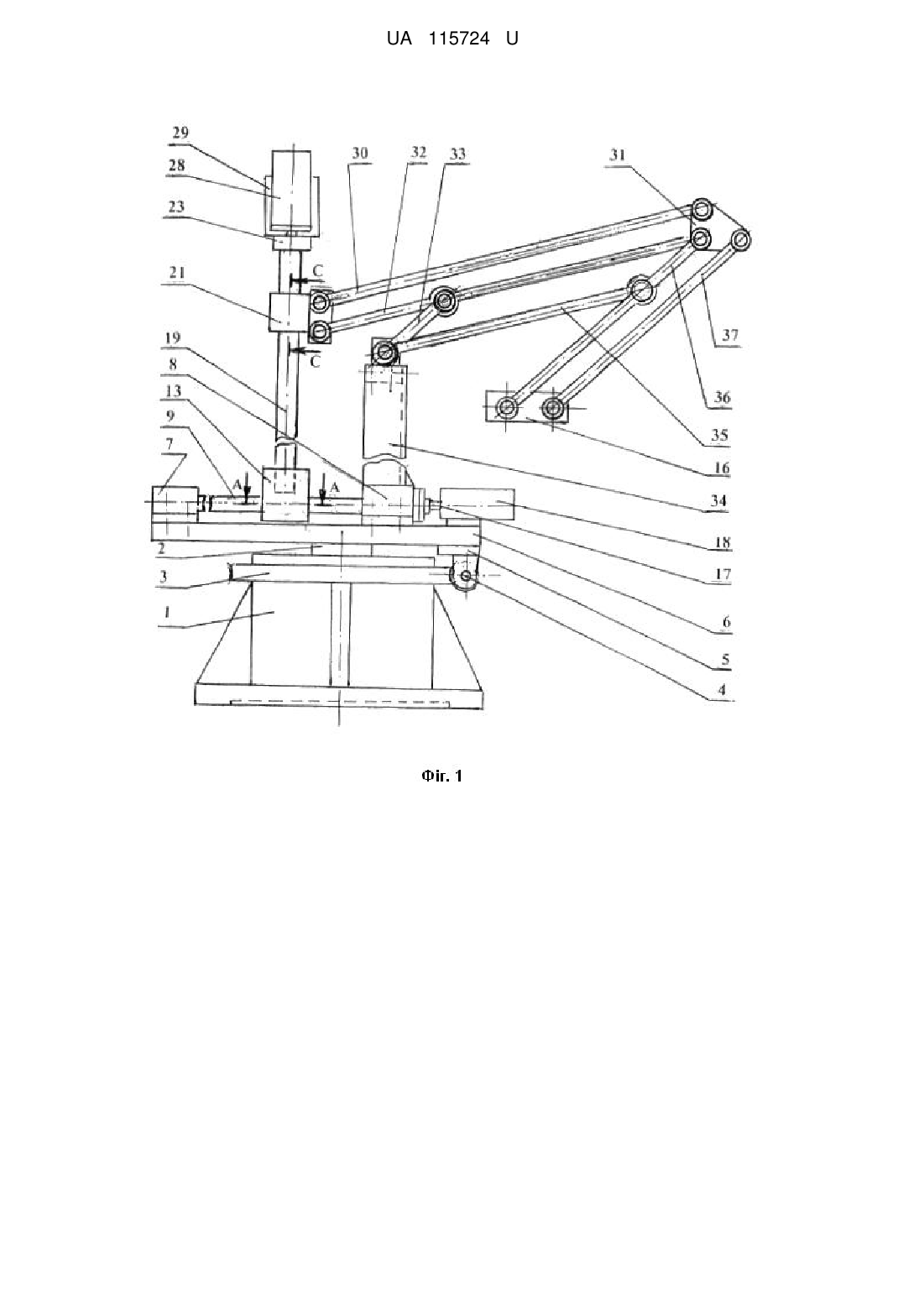
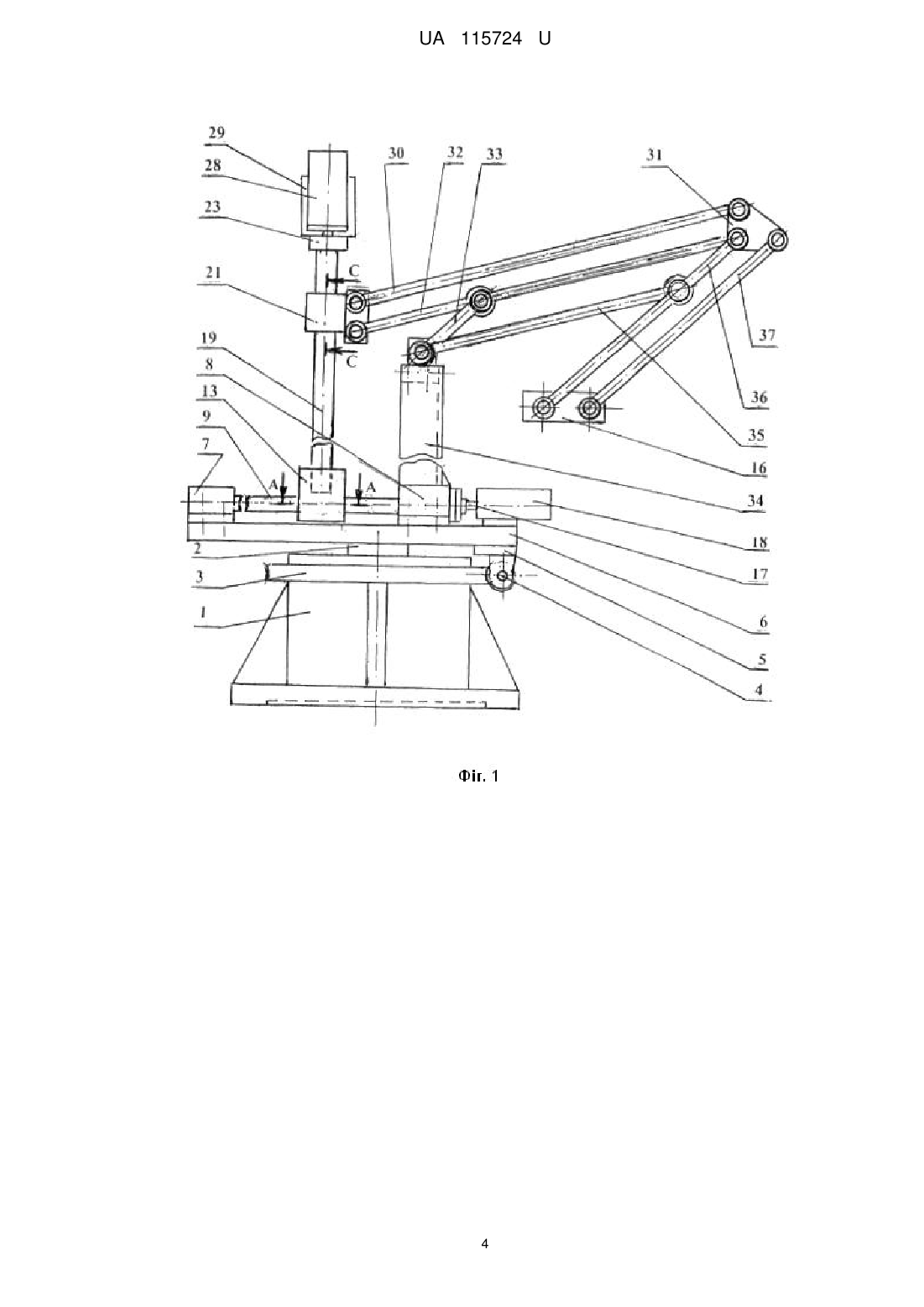
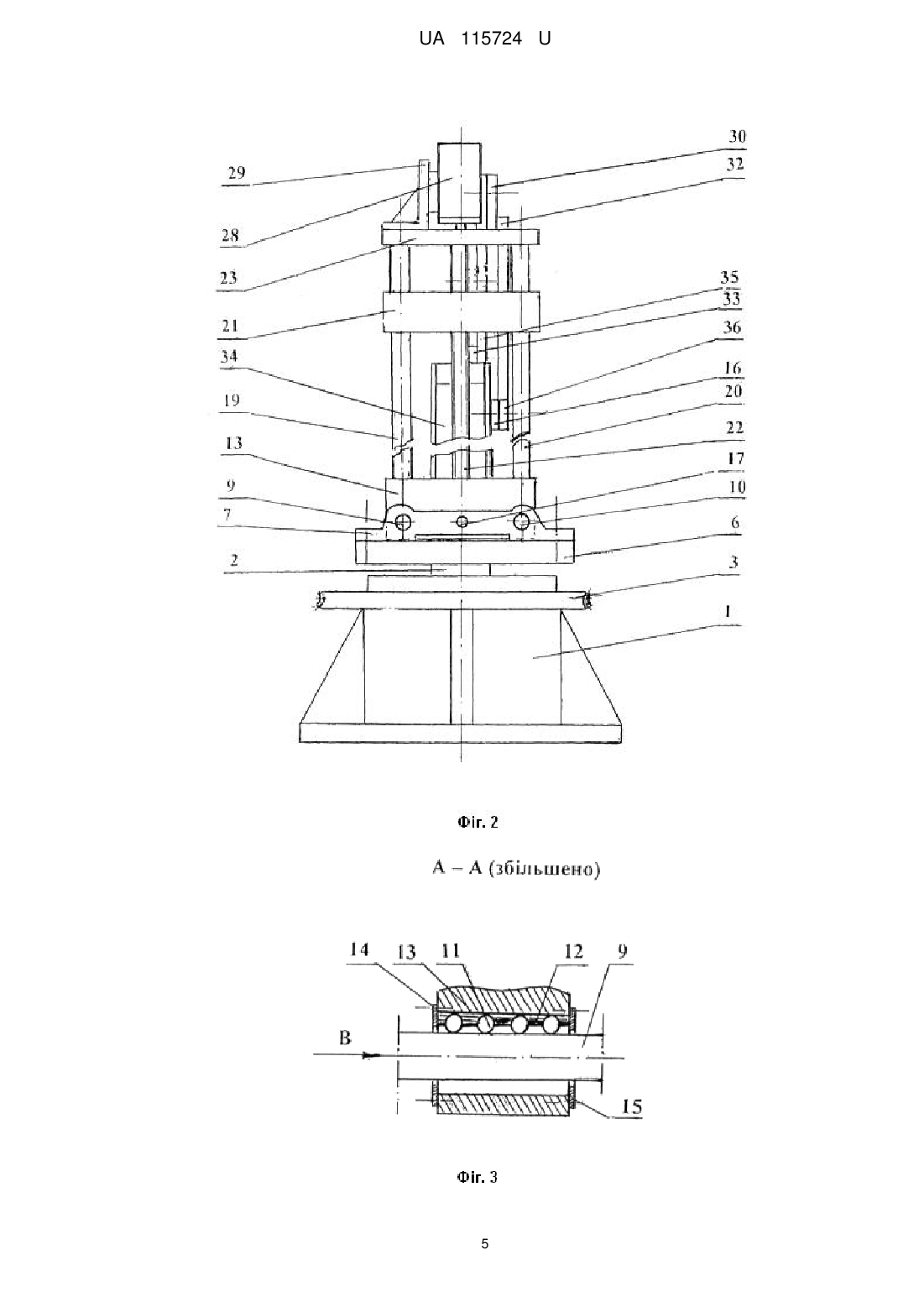
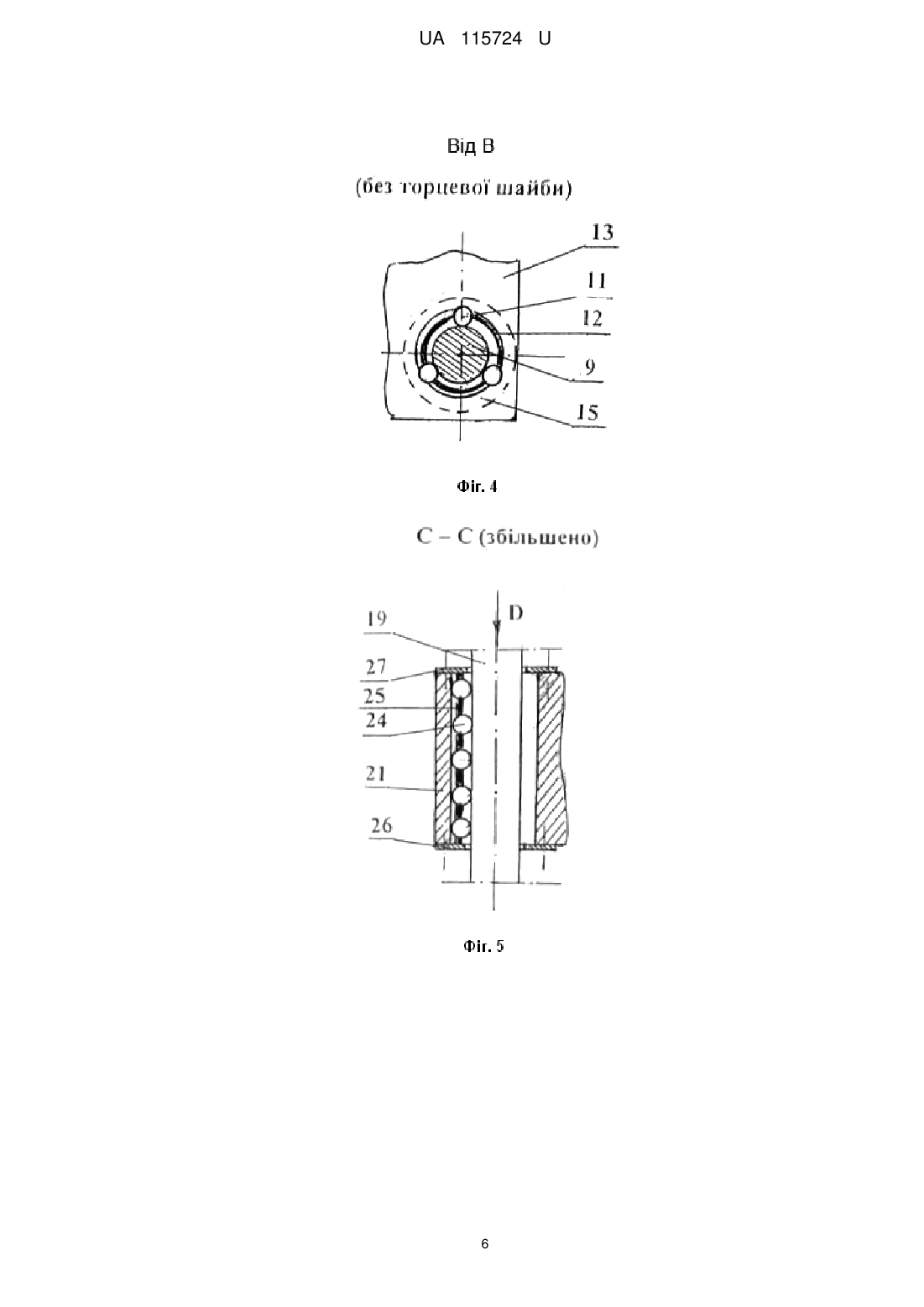
Реферат: UA 115724 U UA 115724 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до машинобудування та, зокрема, конструкцій координатного позиціонування у роботизованих комплексах. Відома конструкція промислового робота (ПР) для координатного позиціонування (див., авт. св. SU № 1148776. Бюл. № 13 від 07.04.1985), що містить основу, обертальний корпус та установлений на ньому пантограф, силовий циліндр та циліндр для захвату, штоки яких сполучені із пантографом. Головним недоліком цього промислового робота є невелика робоча зона, що знижує його функціональні можливості. Найбільш близьким технічним рішенням до корисної моделі, що заявляється, є промисловий робот типу "мускул" (див., П.К. Попов, А.С. Иванов Промышленные роботы: Учебн. пособие по проектированию средств автоматизации и подъемно-транспортных операций. - М.: МВТУ им. Баумана, 1983. - С. 22,23, рис. 3). Промисловий робот містить корпус, каретку з повзуном для горизонтального переміщення вантажу через механізм пантографа, каретку з повзуном для вертикального переміщення вантажу через механізм пантографа, механізм пантографа. Для вертикального переміщення вантажу використовується механізм підйому, який складається з двох пар зубчастих коліс та рейок, які рухаються поступально по нерухомих напрямних. Для горизонтального переміщення використовується аналогічна конструкція. Промисловий робот працює таким чином: обертальний рух через зубчасті колеса та рейки передається важелям механізму пантографа та платформі (веденій ланкового пантографа) на якому закріплюється захватний пристрій. Пантограф забезпечує поступове переміщення платформи як у горизонтальному, так і у вертикальному напрямках. Конструкція даного промислового робота вибрана прототипом. Прототип і корисна модель, що заявляється, мають такі спільні ознаки: - корпус; - повзун вертикального переміщення платформи; - повзун горизонтального переміщення платформи; - каретка вертикального переміщення платформи; - каретка горизонтального переміщення платформи; - механізм пантографа. Конструкція описаного промислового робота має ряд недоліків. 1. Для забезпечення незмінного положення деталі або інструмента, які закріплені на захватному пристрої, треба щоб двигуни знаходилися під напругою, що призводить до збільшення потреби електроспоживання. 2. Складна конструкція зубчастих приводів, що призводить до зниження точності позиціонування деталі або інструмента. 3. Відсутність обертального механізму, що істотно зменшує робочу зону обслуговування. 4. Наявність кареток як горизонтального, так і вертикального переміщення, що також призводить до збільшення електроспоживання та зменшення коефіцієнта корисної дії. В основу корисної моделі поставлена задача створити удосконалену конструкцію промислового робота, яка забезпечить збільшення робочої зони обслуговування, спрощення конструкції для приводів горизонтального і вертикального переміщення робочого органу та заміну тертя ковзання тертям кочення, підвищення коефіцієнта корисної дії та точності позиціювання деталі або інструмента, що одночасно забезпечить надійність і довговічність роботи промислового робота. Поставлена задача вирішується тим, що в конструкції промислового робота, який містить корпус, повзун вертикального переміщення платформи, повзун горизонтального переміщення платформи, каретку вертикального переміщення платформи, каретку горизонтального переміщення платформи, механізм пантографа, згідно з корисною моделлю, каретка горизонтального переміщення платформи виконана у вигляді двох гладких суцільних циліндрів, які установлені нерухомо на двох опорах так, що їх горизонтальні поздовжні осі знаходяться у горизонтальній площині, опори жорстко закріплені на несучому диску, який в свою чергу закріплений жорстко та співвісно на валу обертання навколо вертикальної осі, а вал обертання установлений за допомогою упорно-радіальних підшипників у корпусі, на корпусі жорстко та співвісно з валом обертання установлено черв'ячне колесо, яке зачеплене з черв'яком, установленим рухомо на несучому диску, повзун горизонтального переміщення платформи тілами кочення з сепараторами установлений рухомо на горизонтальних гладких суцільних циліндрах і утворює кульково-гвинтове з'єднання з горизонтальним гвинтом, який установлений рухомо на опорах каретки горизонтального переміщення в площині поздовжніх осей гладких суцільних циліндрів, на повзуні горизонтального переміщення платформи каретка вертикального переміщення платформи виконана у вигляді двох вертикальних гладких суцільних циліндрів жорстко установлених на повзуні горизонтального переміщення 1 UA 115724 U 5 10 15 20 25 30 35 40 45 50 55 60 платформи, при цьому на гладких суцільних циліндрах тілами кочення з сепараторами установлений повзун вертикального переміщення платформа, який в свою чергу утворює кульково-гвинтове з'єднання з вертикальним гвинтом, рухомо установленим одним кінцем на повзун горизонтального переміщення платформи, а другим кінцем - на траверсі, жорстко закріплений на кінцях вертикальних гладких суцільних циліндрів. Промисловий робот-пантограф зображений на кресленні, де: фіг. 1. - фронтальний вигляд промислового робота-пантографа; фіг. 2. - профільний вигляд промислового робота-пантографа; фіг. 3. - вигляд повзуна горизонтального переміщення з перерізу А-А по фіг. 1; фіг. 4 - вигляд по стрілці В по фіг. 3; фіг. 5. - вигляд повзуна вертикального переміщення з перерізу С-С по фіг. 1; фіг. 6 - вигляд по стрілці D по фіг. 5. Промисловий робот-пантограф складається з корпусу 1 (див фіг. 1, 2), в якому за допомогою упорно-радіальних підшипників (на кресленні не показані) установлений вал 2 обертання навколо вертикальної осі. У корпусі 1, співвісно з валом 2, жорстко установлено черв'ячне колесо 3, яке зачеплене з черв'яком 4. Черв'як 4 за допомогою опорів 5 установлений на несучому диску 6, який жорстко та співвісно закріплений на валу 2. На несучому диску 6 жорстко закріплені опори 7, 8, в котрих нерухомо установлені гладкі суцільні горизонтальні циліндри 9, 10 горизонтального переміщення платформи 16 таким чином, що їх поздовжні геометричні осі знаходяться в площині, перпендикулярній осі обертання вала 2. На гладких суцільних горизонтальних циліндрах 9, 10 за допомогою тіл кочення 11 з сепаратором 12 (див. фіг. 3, 4) рухомо установлений повзун 13 горизонтального переміщення платформи 16, на якому закріпляється захоплюючий пристрій (на кресленнях не показано). На торцях повзуна 13 горизонтального переміщення платформи 16 закріплені обмежені шайби 14, 15 (див. фіг. 3, 4). Повзун 13 горизонтального переміщення платформи 16 одночасно утворює кульково-гвинтове з'єднання (на кресленні не показано) з горизонтальним гвинтом 17. Горизонтальний гвинт 17 одним кінцем установлений рухомо в опору 7, а другим кінцем - в опору 10 та одночасно з'єднаний з електродвигуном 18, жорстко закріпленим на несучому диску 6. На повзуні 13 горизонтального переміщення платформи 16 жорстко та вертикально установлені два гладких суцільних циліндри 19, 20 (див. фіг. 1, 2), поздовжні осі яких паралельні осі вала 2 та знаходяться у площині, перпендикулярній осям гладких суцільних горизонтальних циліндрів 9, 10. Повзун 21 вертикального переміщення платформи 16 одночасно утворює кульково-гвинтове з'єднання (на кресленні не показано) з гвинтом 22 вертикального переміщення платформи 16. Гвинт 22 одним кінцем рухомо установлений на повзуні горизонтального переміщення 13, а другим кінцем - на траверсі 23, яка жорстко закріплена на кінцях гладких суцільних циліндрів 19, 20. Повзун 21 вертикального переміщення платформи 16 за допомогою тіл кочення 24 з сепаратором 25 (див. фіг. 5, 6) рухомо установлений на вертикальному гладкому суцільному циліндрі 19. Таким же чином повзун 21 з'єднаний з другим вертикальним гладким суцільним циліндром 20. На торцях повзуна 21 вертикального переміщення платформи 16 закріплені обмежуючі шайби 26, 27 (див. фіг. 5, 6). Гвинт 22 вертикального переміщення платформи 16 з'єднаний з двигуном 28, який закріплений на косинці 29. Косинка 29 жорстко закріплена на траверсі 23. Повзун 21 вертикального переміщення платформи 16 шарнірно сполучений з першим підтримуючим важелем 30 пантографа, який другим кінцем шарнірно сполучений з косинкою 31.3 косинкою 31 шарнірно сполучений перший шатун 32 пантографа, довжина якого, дорівнює довжині підтримуючого важеля 30. Шатун 32 також одночасно шарнірно сполучений з повзуном вертикального переміщення 21 та кривошипом 33 пантографа. Відстань між центрами шарнірних з'єднань підтримуючого важеля 30 і першого шатуна 32 на повзуні 21 та косинці 31 рівні між собою. Кривошип 33 шарнірно з'єднаний з вертикальною стійкою 34, яка жорстко закріплена з опорою 8 (див. фіг. 1). Кривошип 33 одночасно шарнірно сполучений з коромислом 35 пантографа. З коромислом 35 сполучений другий шатун 36 пантографа, який одним кінцем шарнірно з'єднаний з косинкою 31, а другим кінцем також шарнірно - з платформою 16. З платформою 16 шарнірно з'єднаний другий підтримуючий важіль 37 пантографа, який другим кінцем з'єднаний з косинкою 31. Відстань між центрами шарнірних з'єднань 16-36 та 16-37 на платформі дорівнює відстані між шарнірними з'єднаннями 31-36 та 31-37 на косинці. Пантограф працює таким чином. Від двигуна 28 обертальний рух передається гвинту 22 (див. фіг. 2). Від гвинта 22 рух передається повзуну горизонтального переміщення 21 і одночасно - важелям 30, 32. Від важелів 30, 32 рух передається кривошипу 33, коромислу 35 та косинці 31. Від косинки 31 та коромисла 35 рух передається другому шатуну 36 і другому підтримуючому важелю 37. Згідно з властивостями пантографа платформа 16 переміщається у вертикальному напрямку, (див., 2 UA 115724 U 5 10 15 20 наприклад, И.И. Артоболевский, Н.И. Левитский, С.А. Черкудинов Синтез плоских механизмов. М.: Физ.-мат. лит., 1959. - С. 274, рис. 365). Горизонтальне переміщення платформи 16 виконується гвинтом 17 (див. фіг. 1, 2), який отримує рух від двигуна 18. Від гвинта 17 поступальний рух передається повзуну горизонтального переміщення 13, і від нього вертикальним гладким суцільним циліндрам 19, 20 та повзуну 21 вертикального переміщення. Згідно з властивостями пантографа (див. там же) платформа 16 переміщається у горизонтальному напрямку. Обертання навколо осі вала 2 здійснюється черв'яком 4, який зачеплений з черв'ячним колесом 3 та отримує рух від свого двигуна (на кресленні не показано). Через те, що черв'ячне колесо 3 нерухоме, то черв'як 4, опори 5, які закріплені на несучому диску 6, обертаються навколо черв'ячного колеса 3, що в свою чергу призводе до обертального руху платформи 16. Слід зазначити, що двигуни 28, 18 вертикального та горизонтального переміщення повзунів 21 та 13 відповідно, а також двигун для обертання черв'яка 4, можуть працювати або окремо, або одночасно. Через те, що як гвинтові, так і черв'ячна передачі самогальмуючі, то не треба додаткових гальмуючих пристроїв, що призводить до спрощення конструкції та збільшує точність позиціювання платформи 16. Запропонована конструкція промислового робота-пантографа, в якому за рахунок зміни конструкції досягається збільшення робочої зони обслуговування, спрощення конструкції для приводів горизонтального і вертикального переміщення робочого органу та заміну тертя ковзання тертям кочення, підвищення коефіцієнта корисної дії та точністю позиціювання деталі або інструмента, забезпечує надійність і довговічність роботи промислового робота. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 25 30 35 40 45 Промисловий робот-пантограф, що містить корпус, повзун вертикального переміщення платформи, повзун горизонтального переміщення платформи, каретку вертикального переміщення платформи, каретку горизонтального переміщення платформи і механізм пантографа, який відрізняється тим, що каретка горизонтального переміщення платформи виконана у вигляді двох гладких суцільних циліндрів, які установлені нерухомо на двох опорах так, що їх горизонтальні поздовжні осі знаходяться у горизонтальній площині, опори жорстко закріплені на несучому диску, який в свою чергу співвісно закріплений жорстко та співвісно на валу обертання навколо вертикальної осі, а вал обертання установлений за допомогою упорнорадіальних підшипників у корпусі, на корпусі жорстко та співвісно з валом обертання установлено черв'ячне колесо, яке зачеплене з черв'яком, установленим рухомо на несучому диску, повзун горизонтального переміщення платформи тілами кочення з сепараторами установлений рухомо на горизонтальних гладких суцільних циліндрах і утворює кульковогвинтове з'єднання з горизонтальним гвинтом, який установлений рухомо на опорах каретки горизонтального переміщення в площині поздовжніх осей двох гладких суцільних циліндрів, каретка вертикального переміщення платформи виконана у вигляді двох вертикальних гладких суцільних циліндрів, жорстко установлених на повзуні горизонтального переміщення платформи, причому на гладких суцільних циліндрах тілами кочення з сепараторами установлений повзун вертикального переміщення платформи, який в свою чергу утворює кульково-гвинтове з'єднання з гвинтом вертикального переміщення платформи, рухомо установленим одним кінцем на повзун горизонтального переміщення платформи, а другим кінцем - на траверсі, жорстко закріпленій на кінцях вертикальних гладких суцільних циліндрів. 3 UA 115724 U 4 UA 115724 U 5 UA 115724 U 6 UA 115724 U Комп’ютерна верстка Т. Вахричева Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП "Український інститут інтелектуальної власності", вул. Глазунова, 1, м. Київ – 42, 01601 7
ДивитисяДодаткова інформація
МПК / Мітки
МПК: B25J 1/06
Мітки: промисловий, робот-пантограф
Код посилання
<a href="https://ua.patents.su/9-115724-promislovijj-robot-pantograf.html" target="_blank" rel="follow" title="База патентів України">Промисловий робот-пантограф</a>
Промисловий робот
Номер патенту: 67181
Опубліковано: 15.06.2004
Автори: Бергер Еміль Григорович, Бергер Євгеній Емильович, Осадчий Володимир Степанович
МПК: B25J 11/00
Мітки: промисловий, робот
Формула / Реферат:
Промисловий робот, що містить опору, вертикальну і горизонтальну каретки, механічну руку із схватом, виконану у вигляді куліси, і гвинтову пару, гайка якої зв'язана з горизонтальною кареткою, який відрізняється тим, що він обладнаний зв'язаною з горизонтальною кареткою і встановленою в поворотному камені кулісою з профільованим кулачком, який зв'язаний за допомогою штовхача з вертикальною кареткою, при цьому поворотний камінь на важелі, схват...
Промисловий робот
Номер патенту: 27488
Опубліковано: 15.09.2000
Автор: Малетті Енріко
МПК: B25J 9/10, B21D 43/04
Мітки: робот, промисловий
Текст:
...на нём два двигателя с понижающими передачами, соединённые с ними два манипулятора с возможностью вращения вокруг первой и второй осей, причём оси параллельны и расположены на расстоянии одна от другой, два предплечья, шарнирно сочленённые одними концами с манипуляторами с возможностью вращения вокруг третьей и четвёртой осей, параллельных первой и второй осям вращения манипуляторов, и шарнирно сочленённые противоположными концами с...
Промисловий робот
Номер патенту: 24123
Опубліковано: 31.08.1998
Автор: Баньковський Петро Андрійович
МПК: B25J 1/00
Мітки: робот, промисловий
Формула / Реферат:
Промышленный робот, содержащий руку, состоящую из платформ треугольной формы, каждая из которых связана с соседней платформой посредством трех приводов линейного перемещения, шарнирно установленных на этих платформах, а также расположенный на крайней платформе руки схват, в корпусе которого установлен привод перемещения его губок, отличающийся тем, что, с целью расширения технологических возможностей за счет увеличения рабочей зоны,...
Підйомно-транспортний робот
Номер патенту: 65191
Опубліковано: 25.11.2011
Автори: Філь Павло Володимирович, Носко Павло Леонідович, Шисман Володимир Юхимович, Чокнадій Лідія Миронівна
МПК: B66C 23/00
Мітки: підйомно-транспортний, робот
Формула / Реферат:
Підйомно-транспортний робот, рука якого являє собою шарнірно зв'язані між собою ланки, що входять у кінематичні пари, який відрізняється тим, що ланки виконані у вигляді пантографа та забезпечені приводом зміни довжини ланок, сполученим з ланками через задавальний механізм керування ланками, що змінює довжини ланок пропорційно, привод забезпечено повзунами, встановленими з можливістю переміщення паралельно суміжним ланкам.
Мобільний крокуючий робот
Номер патенту: 87719
Опубліковано: 10.08.2009
Автори: Мащенко Сергій Валеріович, Задніпрянний Олександр Миколайович
МПК: B25J 11/00, B62D 57/00
Мітки: робот, крокуючий, мобільній
Формула / Реферат:
1. Мобільний крокуючий робот, що містить внутрішню і зовнішню рухливі опорні частини, механізми горизонтального і вертикального переміщення опорних частин, кожний з яких складається з приводу, прямолінійної кінематичної пари і напрямних, механізм повороту, який відрізняється тим, що в нього введений механізм балансування, а кожна з опорних частин оснащена тільки одним механізмом переміщення, причому одна з них оснащена тільки механізмом...
Попередній патент: Спосіб одержання екстракту з горобини чорноплідної
Наступний патент: Спосіб отримання комплексного флюсу
Випадковий патент: Спосіб корекції фігури людини