Спосіб підвищення точності визначення орієнтації об’єкта, що швидко обертається навколо поздовжньої осі
Номер патенту: 114141
Опубліковано: 25.04.2017
Автори: Кузнєцов Юрій Олексійович, Некрасова Марія Володимирівна, Макаренко Олександр Якович, Успенський Валерій Борисович

Формула / Реферат
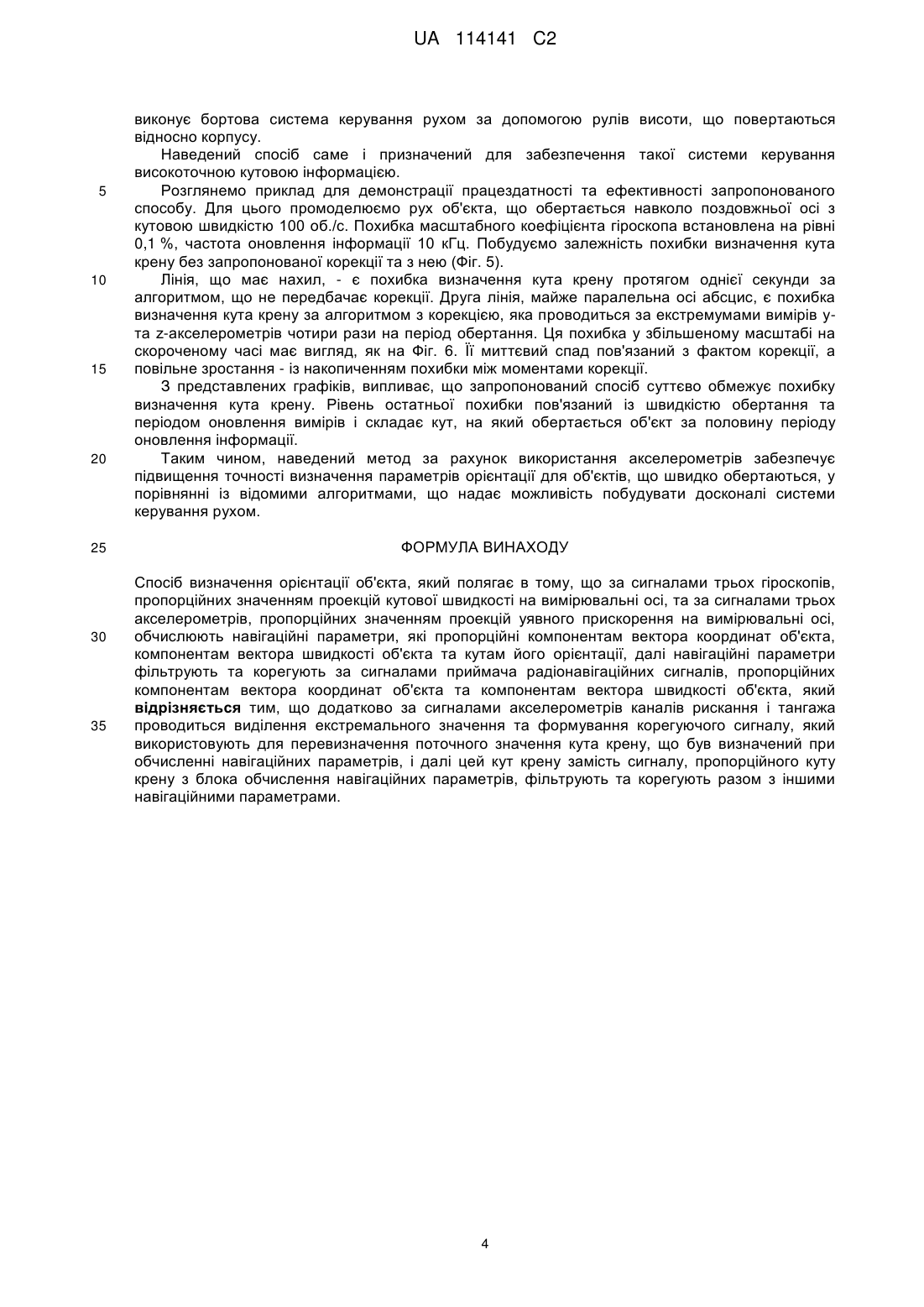
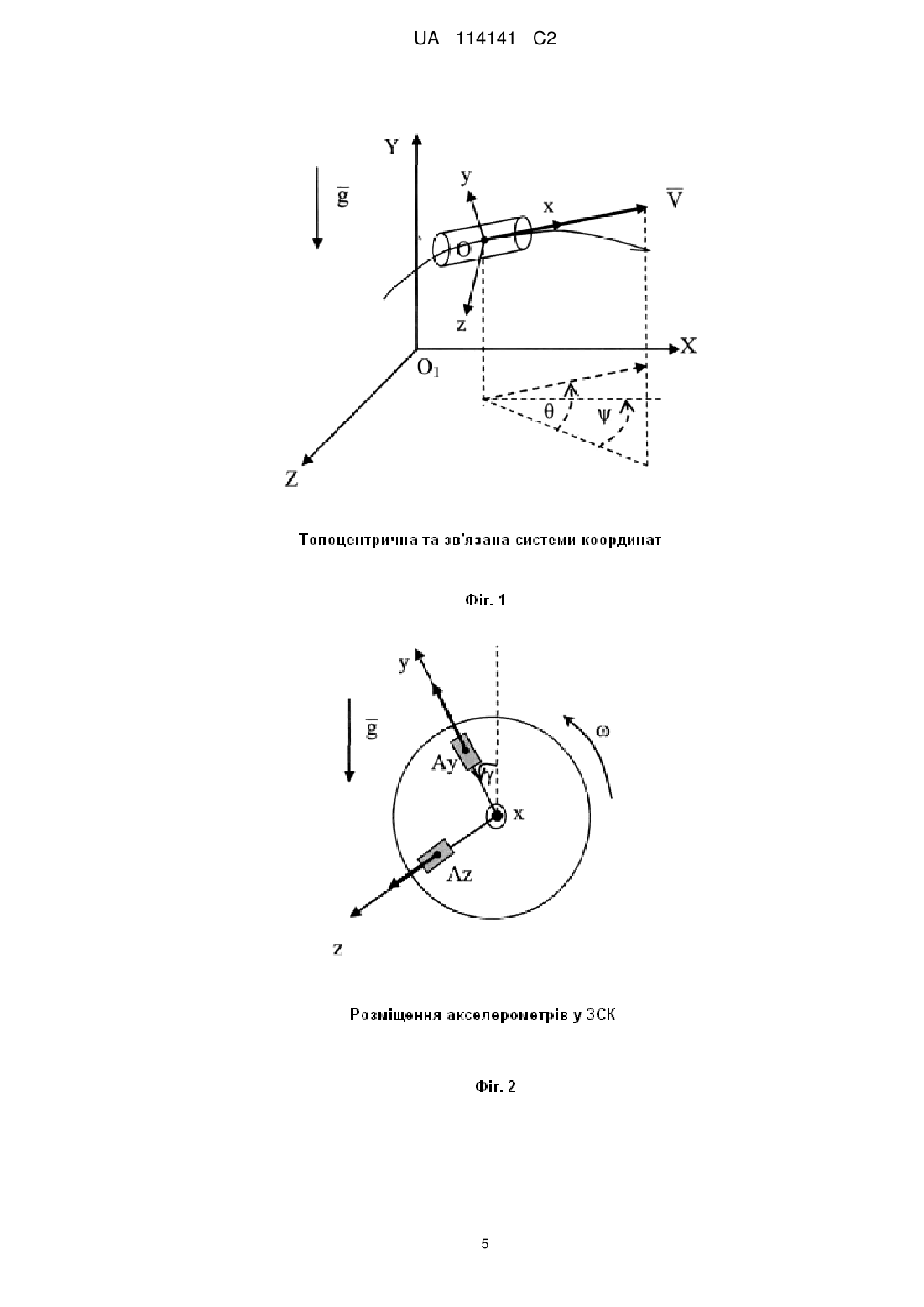
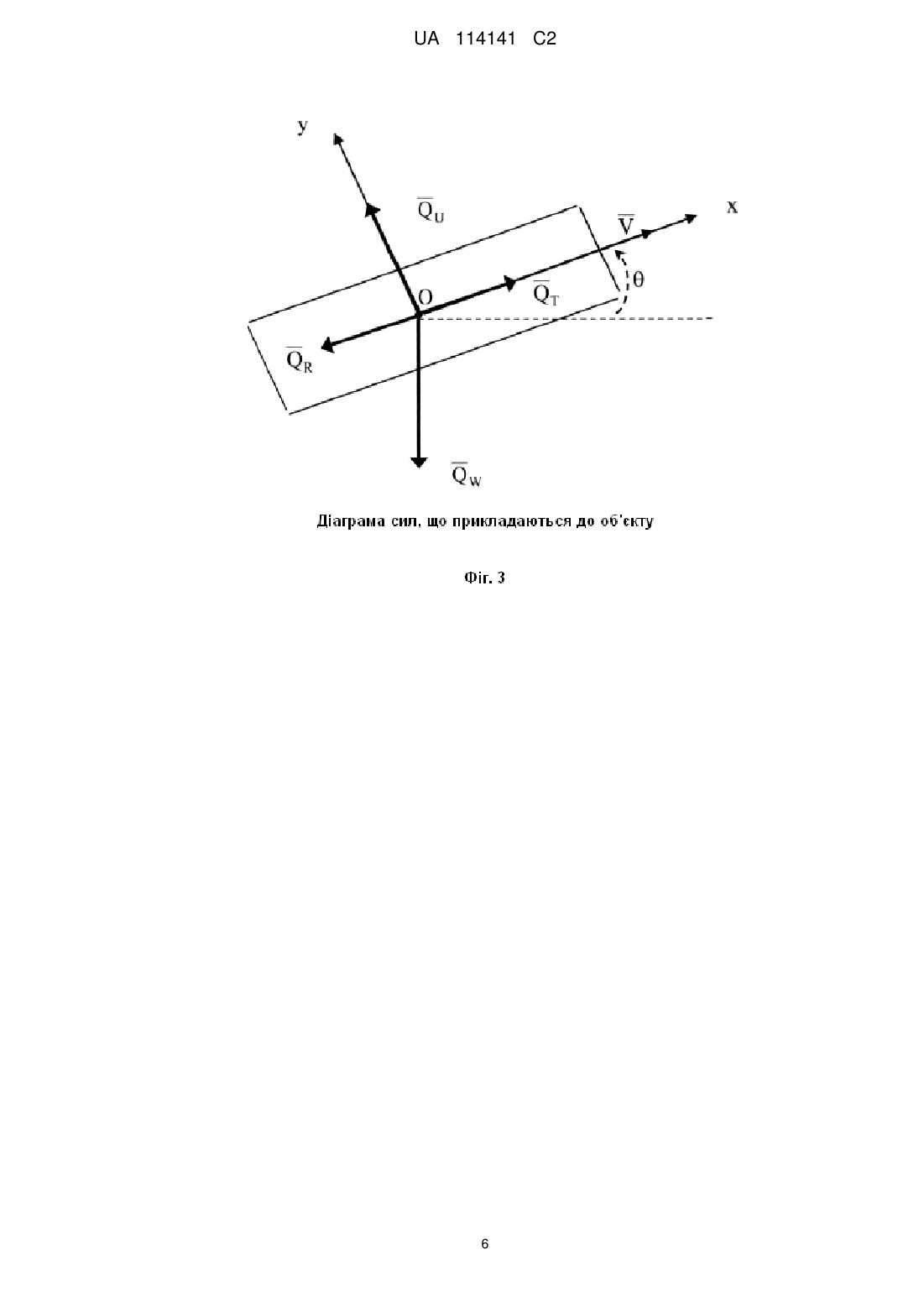
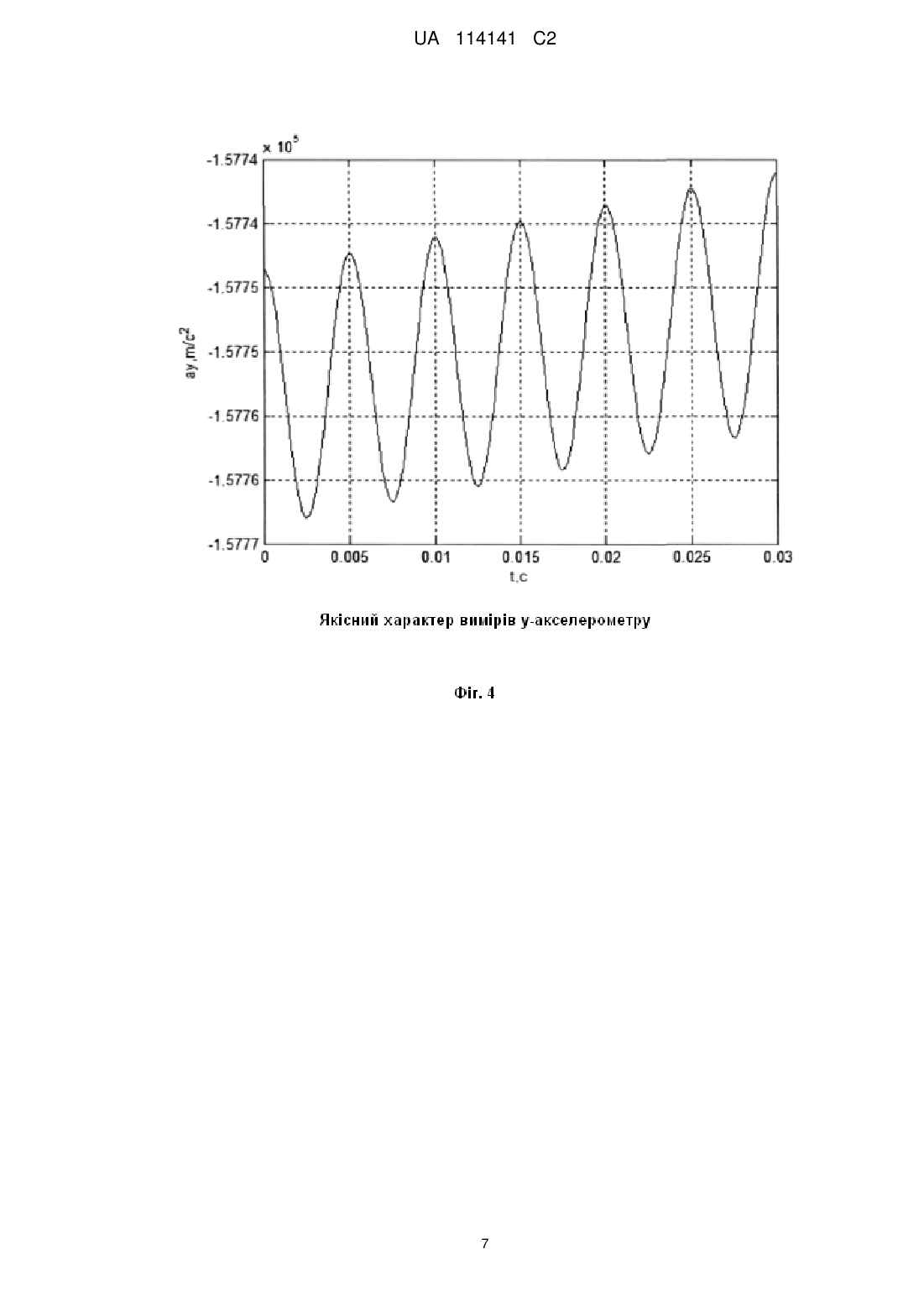
Спосіб визначення орієнтації об'єкта, який полягає в тому, що за сигналами трьох гіроскопів, пропорційних значенням проекцій кутової швидкості на вимірювальні осі, та за сигналами трьох акселерометрів, пропорційних значенням проекцій уявного прискорення на вимірювальні осі, обчислюють навігаційні параметри, які пропорційні компонентам вектора координат об'єкта, компонентам вектора швидкості об'єкта та кутам його орієнтації, далі навігаційні параметри фільтрують та корегують за сигналами приймача радіонавігаційних сигналів, пропорційних компонентам вектора координат об'єкта та компонентам вектора швидкості об'єкта, який відрізняється тим, що додатково за сигналами акселерометрів каналів рискання і тангажа проводиться виділення екстремального значення та формування корегуючого сигналу, який використовують для перевизначення поточного значення кута крену, що був визначений при обчисленні навігаційних параметрів, і далі цей кут крену замість сигналу, пропорційного куту крену з блока обчислення навігаційних параметрів, фільтрують та корегують разом з іншими навігаційними параметрами.
Текст
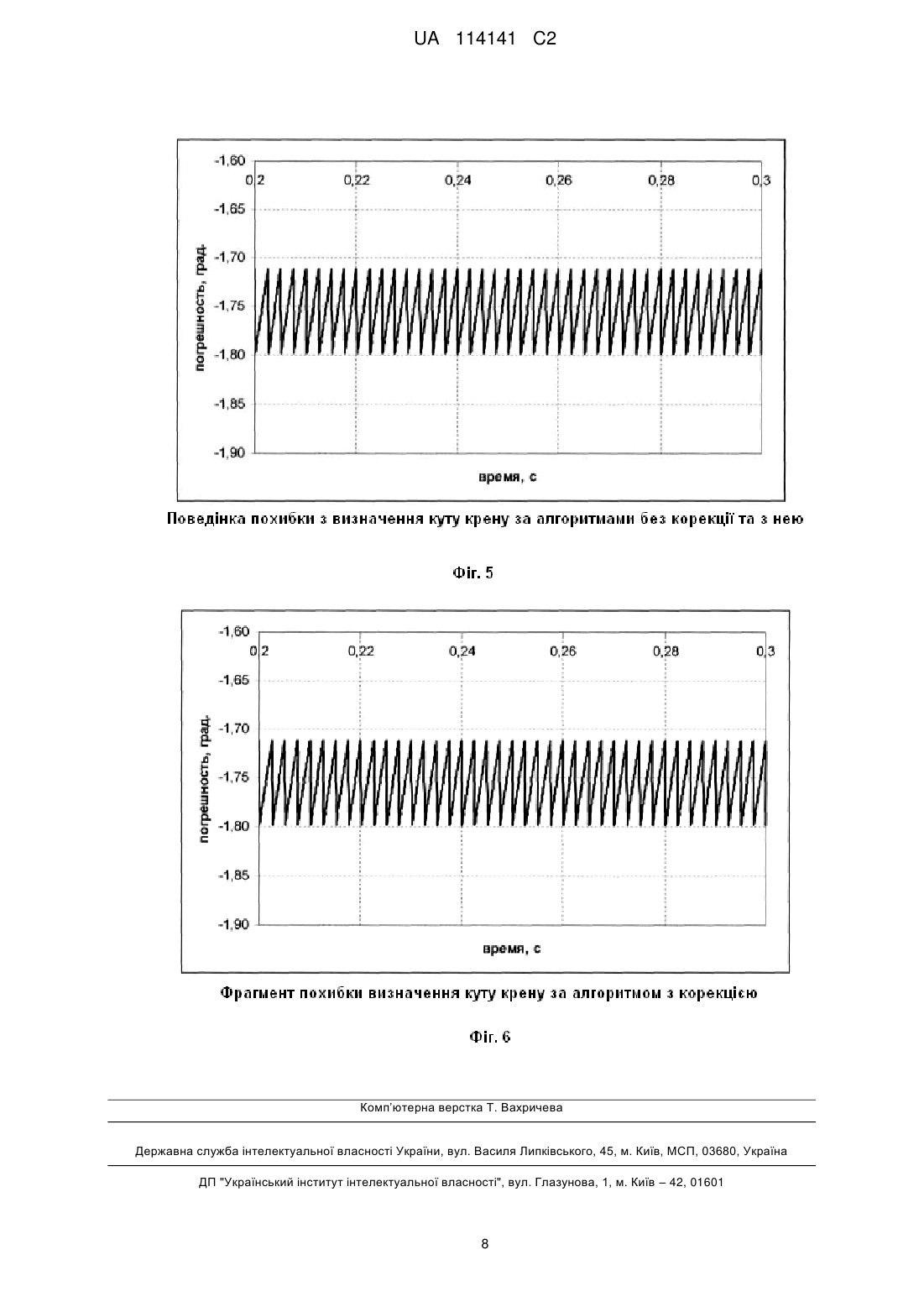
Реферат: Винахід належить до ракетно-космічної техніки і призначений для підвищення точності визначення орієнтації об'єкта, що швидко обертається навколо вздовженої осі. Спосіб визначення орієнтації об'єкта полягає в тому, що за сигналами трьох гіроскопів, пропорційних значенням проекцій кутової швидкості на вимірювальні осі, та за сигналами трьох UA 114141 C2 (12) UA 114141 C2 акселерометрів, пропорційних значенням проекцій уявного прискорення на вимірювальні осі, обчислюють навігаційні параметри, які пропорційні компонентам вектора координат об'єкта, компонентам вектора швидкості об'єкта та кутам його орієнтації, далі навігаційні параметри фільтрують та корегують за сигналами приймача радіонавігаційних сигналів, пропорційних компонентам вектора координат об'єкта та компонентам вектора швидкості об'єкта, згідно з винаходом, додатково за сигналами акселерометрів каналів рискання і тангажа проводиться виділення екстремального значення та формування корегуючого сигналу, який використовують для перевизначення поточного значення кута крену, що був визначений при обчисленні навігаційних параметрів, і далі цей кут крену замість сигналу, пропорційного куту крену з блока обчислення навігаційних параметрів, фільтрують та корегують разом з іншими навігаційними параметрами. Технічний результат: забезпечення високої точності визначення орієнтації об'єкта, що швидко обертається навколо поздовжньої осі, за рахунок використання вимірів акселерометрів, що надає можливість побудувати досконалі системи керування рухом. UA 114141 C2 5 10 15 20 25 30 35 40 45 50 55 60 Винахід належить до систем орієнтації та навігації для високодинамічних об'єктів і може бути використаний для побудови високоточних систем керування рухом об'єкта, що швидко обертається навколо поздовжньої осі. Для керування рухом об'єкта, що швидко обертається навколо поздовжньої осі, потрібно з високою частотою визначати та використовувати інформацію стосовно його тривісної орієнтації у просторі. У загальному випадку це досягається використанням безплатформної інерціальної навігаційної системи (БІНС), яка містить три гіроскопи та три акселерометри, розташовані уздовж ортогональної системи вимірювальних осей. Специфіка об'єкта, що швидко обертається, полягає в тому, що в такій БІНС стрімко накопичується похибка визначення орієнтації, пов'язана із похибкою так званого масштабного коефіцієнта для гіроскопа та пропорційна куту повороту відносно його вимірювальної осі. Такий порядок речей призводить до того, що для визначення керування стає неможливим використання інформації стосовно орієнтації за чинником її недостовірності. Таким чином, підвищення точності визначення орієнтації об'єкта в цих умовах є необхідною умовою для створення високоточних систем керування рухом. З відомих способів підвищення точності систем орієнтації поширення набули такі, що спираються на вдосконалення приладів систем, методик попереднього калібрування датчиків, алгоритмічного забезпечення з обробки вимірів під час функціонування та періодичної корекції вектора стану з використанням надлишкової інформації. Відомий спосіб підвищення точності систем орієнтації на базі вдосконалення апаратної бази передбачає використання більш точних гіроскопів (див. Распопов В.Я. Микромеханические приборы / М: Машиностроение, 2007. - 399 с). Такий спосіб має суттєву обмеженість, тому що на сьогодні найточніші гіроскопи мають стабільність відносного масштабного коефіцієнту на -5 рівні 10 (див. George T. Schmidt. INS/GPS Technology Trends / The Charles stark Draper laboratory, Inc. // Доклад в ЦНДІ "Электроприбор" (м. Санкт-Петербург) 27, 28 травня 2004 р.), що при швидкості обертання 6000 об./хв. вже через 3 с приводить до похибки визначення куту повороту, більш ніж 1°. Менш точні та більш доступніші гіроскопічні датчики погіршують цю оцінку на 2-3 порядки. Таким чином, вказаний спосіб не є ефективним для умов, що розглядаються. Відомий спосіб підвищення точності систем орієнтації на базі вдосконалення методики попереднього калібрування датчиків (див. Lee S-J. Determitation of Error Parameters of Strapdown INS Sensor Unit Using the 3-axis Motion Table / Lee S-J., Tunik A.A., Kim J-Ch. // Proceeding of the KSASSpring Annual Meeting '99 / Korea. - 1999. - P. 485-488.) основується на визначенні систематичної компоненти похибки, опису її математичної залежності від певних факторів, ідентифікації параметрів цієї залежності та використанні визначеної моделі як компенсуючої під час експлуатації датчика. Такий спосіб має ті недоліки, що потребує дорогого спеціального обладнання, великого терміну проведення експерименту, а також неможливість досягнення сталої якості компенсації упродовж всього часу життєвого циклу виробу. Зазначимо, що цей спосіб, як і попередній, суттєво підвищують також і кінцеву вартість навігаційної системи, що не завжди є економічно виправданим. Відомий спосіб підвищення точності систем орієнтації на базі вдосконалення алгоритмічної бази обробки вимірів під час функціонування (див. Бранец В.Н., Шмыглевский И.П. Применение кватернионов в задачах ориентации твердого тела. - М.: Наука, 1973. - 320 с, C. 150) полягає у використанні більш ефективних алгоритмів обробки інформації з гіроскопічних датчиків. Суть цього способу в тому, що він надає можливість використовувати дешеві та менш габаритні датчики (гіроскопи і акселерометри, а іноді лише акселерометри), компенсуючи алгоритмічно їх невисоку точність та обробляючи інформацію з цих датчиків таким чином, щоб можливо було отримати всі необхідні навігаційні параметри з достатньою точністю. Недоліком такого способу є, по-перше, суттєві обмеження на допустиму швидкість, що вимірюється, з оглядом на потрібну точність визначення орієнтації, по-друге, чутливість до інструментальних похибок гіроскопа. А також необхідною умовою ефективного застосування такого способу є використання у системі все ж таки гіроскопів високої точності. Відомий найбільш близький за технічною суттю спосіб підвищення точності систем орієнтації в БІНС полягає у періодичній корекції вектора стану (у тому числі і кутів орієнтації) за рахунок використання надлишкової для системи у цілому інформації, що дає приймач сигналів супутникової навігаційної системи (див. Grewal, M.S. Global Positioning Systems, Inertial Navigation / M.S. Grewal, L.R. Weill, A.P. Andrews. - New York: John Wiley & Sons, Inc, 2001. - 392 p.). Ця корекція здійснюється за допомогою алгоритму фільтра Калмана і потребує досить складного програмно-математичного забезпечення. Суть способу полягає у тому, що сигнали X, Y , Z з трьох гіроскопів, пропорційні значенням проекцій кутової швидкості на 1 UA 114141 C2 вимірювальні осі, та сигнали a X , a Y , aZ з трьох акселерометрів, пропорційні значенням проекцій уявного прискорення на вимірювальні осі, надходять в блок обчислення навігаційних параметрів, з виходу якого сигнали, пропорційні компонентам вектора координат об'єкта RI , 5 компонентам вектора швидкості об'єкта V I та кутам його орієнтації I (кут курсу), I (кут тангажа), I (кут крену) надходять на першу групу входів блока фільтрації та корекції, на другу групу входів якого надходять сигнали з приймача радіонавігаційних сигналів, пропорційні компонентам вектора координат об'єкта R S та компонентам вектора швидкості об'єкта V S . 10 15 20 25 30 35 Вихідні сигнали блока фільтрації та корекції R, V, , , пропорційні коректованим значенням однойменних навігаційних параметрів і надходять на вихід системи, водночас забезпечуючи зворотний зв'язок для забезпечення сталості роботи системи. Перевагами такого способу є зниження вимог до інерціальних датчиків при збереженні довготривалої високої точності кінцевих навігаційних визначень. Недоліками вказаного способу є, по-перше, залежність від наявності радіосигналів від супутникових систем та від зовнішніх перешкод на шляху проходження радіосигналів, по-друге, невелика частота здійснення корекції, обумовлена низькою частотою оновлення супутникової інформації. Все це робить проблемним використання такого способу в умовах швидкого обертання об'єкта. В основу винаходу поставлено задачу вдосконалення способу корекції за надлишковою інформацією параметрів орієнтації об'єкта, що швидко обертається навколо поздовжньої осі, шляхом додаткової високочастотної корекції кута крену на підставі використання вимірів вектора уявного прискорення, проекції якого на осі чутливості акселерометрів внаслідок обертання мають модульований характер. Поставлена задача вирішується тим, що у відомому способі, який полягає в тому, що за сигналами трьох гіроскопів, пропорційних значенням проекцій кутової швидкості на вимірювальні осі, та за сигналами трьох акселерометрів, пропорційних значенням проекцій уявного прискорення на вимірювальні осі, обчислюють навігаційні параметри, які пропорційні компонентам вектора координат об'єкта, компонентам вектора швидкості об'єкта та кутам його орієнтації, далі навігаційні параметри фільтрують та корегують за сигналами приймача радіонавігаційних сигналів, пропорційних компонентам вектора координат об'єкта та компонентам вектора швидкості об'єкта, додатково за сигналами акселерометрів каналів рискання і тангажа проводиться виділення екстремального значення та формування корегуючого сигналу, який використовують для перевизначення поточного значення кута крену, що був визначений при обчисленні навігаційних параметрів, і далі цей кут крену, замість сигналу, пропорційного куту крену з блока обчислення навігаційних параметрів, фільтрують та корегують разом з іншими навігаційними параметрами. До визначення суті винаходу розглянемо деякі загальні положення. Нехай O1XYZ - нерухома топоцентрична декартова система координат (ТДСК), в якій вісь O1Y спрямована догори паралельно вектору прискорення вільного падіння g . Розглянемо 40 45 50 55 об'єкт, що рухається вздовж деякої траєкторії зі швидкістю V , і пов'яжемо з ним зв'язану систему координат (ЗСК) Oxyz (Фіг. 1). В окремому випадку, що не звужує наступний розгляд, приймемо, що поздовжня вісь об'єкта Ох співпадає із вектором швидкості V , а вісь О1Х - з напрямом на північ. В цих умовах кут нахилу траєкторії еквівалентний куту тангажа , а кут шляху еквівалентний куту курсу . Крім траєкторного руху об'єкт здійснює обертання навколо осі Ох зі значною кутовою швидкістю , що може змінюватись, але повільно. Назвемо кут повороту навколо осі Ох кутом крену у і зазначимо, що коли 0 та 0 , то площина xOz паралельна горизонтальній площині XO 1Z. На об'єкті серед інших вимірювачів розташовано два акселерометри Ау та Az на відстані від осі обертання та з осями чутливості, колінеарними відповідним осям ЗСК (Фіг. 2). Суть винаходу полягає у наступному. У способі, що описаний у прототипі, за допомогою трьох гіроскопів, трьох акселерометрів та приймача супутникових сигналів здійснюється визначення кутів, швидкості та координат об'єкта. Але в умовах швидкого обертання об'єкта похибка масштабного коефіцієнта х-гіроскопа приводить до постійного стрімкого зростання похибки визначення кута крену у такий спосіб. Для підвищення точності визначення кута крену пропонується із збільшеною учетверо частотою обертання об'єкта проводити корекцію його 2 UA 114141 C2 5 значення за показами у- та z-акселерометрів, які у загальному випадку мають вигляд модульованої з частотою обертання кривої із змінною амплітудою модуляції та повільною тенденцією середньої лінії. Фіксуючи за допомогою електронної апаратури проходження послідовністю вимірів у-акселерометра свого локального максимуму або локального мінімуму, формується сигнал корекції "1" чи "2", який відповідає істинному значенню кути крену e 0 ("1") або e ("2"). Для максимального та мінімального значення вимірів z-акселерометра формується сигнал корекції "-1" або "-2", який відповідає істинному значенню кута крену e 3 / 2 ("-1") та e 1/ 2 ("-2"). Сформований таким чином сигнал корекції надходить до 10 15 БРККК, де здійснюється перевизначення поточного значення кута крену за правилом I e . Для обґрунтування викладеного способу звернемось до відповідних математичних моделей. Оскільки за умовами, що розглядаються, проекція вектора загальної кутової швидкості обертання об'єкта на поздовжню вісь є набагато більшою, ніж усі інші проекції, відповідно будемо нехтувати швидкістю зміни кутів тангажа та курсу. В цих умовах розглянемо модель поточних значень вимірів, які реалізує у-акселерометр, вважаючи початкове значення кута крену нульовим. Проекція уявного вектору прискорення об'єкта на вісь чутливості уакселерометра має вигляд ay (t) WOy (t) 2 (t) g cos(t) cos (t) , (1) 20 25 30 де a y ( t ) - виміри у-акселерометрі в поточному часі t ; WOy (t ) - поточна проекція дійсного прискорення точки О на вісь Оу ЗСК; - відстань розміщення чутливого елемента у-акселерометра від осі обертання Ох; ( t ) - поточна швидкість обертання об'єкта навколо поздовжньої осі; g - значення прискорення вільного падіння; (t ) - поточне значення кута тангажа; (t ) (t ) t - поточне значення кута крену. Звичайно ( t ) та (t ) змінюються у часі зі швидкістю, набагато меншою, ніж інші змінні. Дійсне прискорення точки О, проекція якого розглядається, є результатом дії усіх зовнішніх сил, які приведені до точки О, і складається, зокрема, з сили тяжіння Q W g m , сили опору середовища QR ( t ) , піднімальної сили QU(t) qU(t) m та, можливо, реактивної сили Q T ( t ) двигунів (Фіг. 3). Оскільки у разі колінеарності вектора швидкості і поздовжньої осі об'єкта сила опору та реактивна сила ортогональні осям чутливості у-акселерометра, проекція WOy (t ) з урахуванням обертання об'єкта навколо осі Ох, виглядає, як 35 WOy ( t ) (qU ( t ) g cos ( t )) cos ( t ) . (2) Підстановка виразу (2) у формулу (1) дає 40 ay (t ) qU(t) cos (t) 2 (t) . (3) Таким чином, виміри у-акселерометрі мають малозмінну складову, пов'язану із зміною швидкості обертання ( t ) , та високочастотну складову, модульовану малозмінним у порівнянні 45 50 із швидкістю обертання прискоренням qU(t ) від піднімальної сили. Якісний характер вимірів (3) приведено на Фіг. 4. З моделі (3) витікає, що при квазістаціонарному характері qU(t ) локальний максимум на періоді оберту об'єкта відповідає 0 , а локальний мінімум досягається при , що підтверджує заявлений спосіб корекції кута крену в системі визначення орієнтації. Аналогічні висновки справедливі і для z-акселерометра. Проведений аналіз встановлює, зокрема, необхідні умови ефективності запропонованого способу: це наявність піднімальної сили. Створення і регулювання такою силою, зазвичай, 3 UA 114141 C2 5 10 15 20 25 30 35 виконує бортова система керування рухом за допомогою рулів висоти, що повертаються відносно корпусу. Наведений спосіб саме і призначений для забезпечення такої системи керування високоточною кутовою інформацією. Розглянемо приклад для демонстрації працездатності та ефективності запропонованого способу. Для цього промоделюємо рух об'єкта, що обертається навколо поздовжньої осі з кутовою швидкістю 100 об./с. Похибка масштабного коефіцієнта гіроскопа встановлена на рівні 0,1 %, частота оновлення інформації 10 кГц. Побудуємо залежність похибки визначення кута крену без запропонованої корекції та з нею (Фіг. 5). Лінія, що має нахил, - є похибка визначення кута крену протягом однієї секунди за алгоритмом, що не передбачає корекції. Друга лінія, майже паралельна осі абсцис, є похибка визначення кута крену за алгоритмом з корекцією, яка проводиться за екстремумами вимірів ута z-акселерометрів чотири рази на період обертання. Ця похибка у збільшеному масштабі на скороченому часі має вигляд, як на Фіг. 6. Її миттєвий спад пов'язаний з фактом корекції, а повільне зростання - із накопиченням похибки між моментами корекції. З представлених графіків, випливає, що запропонований спосіб суттєво обмежує похибку визначення кута крену. Рівень остатньої похибки пов'язаний із швидкістю обертання та періодом оновлення вимірів і складає кут, на який обертається об'єкт за половину періоду оновлення інформації. Таким чином, наведений метод за рахунок використання акселерометрів забезпечує підвищення точності визначення параметрів орієнтації для об'єктів, що швидко обертаються, у порівнянні із відомими алгоритмами, що надає можливість побудувати досконалі системи керування рухом. ФОРМУЛА ВИНАХОДУ Спосіб визначення орієнтації об'єкта, який полягає в тому, що за сигналами трьох гіроскопів, пропорційних значенням проекцій кутової швидкості на вимірювальні осі, та за сигналами трьох акселерометрів, пропорційних значенням проекцій уявного прискорення на вимірювальні осі, обчислюють навігаційні параметри, які пропорційні компонентам вектора координат об'єкта, компонентам вектора швидкості об'єкта та кутам його орієнтації, далі навігаційні параметри фільтрують та корегують за сигналами приймача радіонавігаційних сигналів, пропорційних компонентам вектора координат об'єкта та компонентам вектора швидкості об'єкта, який відрізняється тим, що додатково за сигналами акселерометрів каналів рискання і тангажа проводиться виділення екстремального значення та формування корегуючого сигналу, який використовують для перевизначення поточного значення кута крену, що був визначений при обчисленні навігаційних параметрів, і далі цей кут крену замість сигналу, пропорційного куту крену з блока обчислення навігаційних параметрів, фільтрують та корегують разом з іншими навігаційними параметрами. 4 UA 114141 C2 5 UA 114141 C2 6 UA 114141 C2 7 UA 114141 C2 Комп’ютерна верстка Т. Вахричева Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП "Український інститут інтелектуальної власності", вул. Глазунова, 1, м. Київ – 42, 01601 8
ДивитисяДодаткова інформація
МПК / Мітки
МПК: G05D 1/08, B64G 1/24, G01C 21/24
Мітки: швидкої, об'єкта, осі, спосіб, точності, орієнтації, обертається, поздовжньої, визначення, підвищення
Код посилання
<a href="https://ua.patents.su/10-114141-sposib-pidvishhennya-tochnosti-viznachennya-oriehntaci-obehkta-shho-shvidko-obertaehtsya-navkolo-pozdovzhno-osi.html" target="_blank" rel="follow" title="База патентів України">Спосіб підвищення точності визначення орієнтації об’єкта, що швидко обертається навколо поздовжньої осі</a>
Гіроакселерометричний спосіб визначення параметрів кутової орієнтації
Номер патенту: 100760
Опубліковано: 10.08.2015
Автори: Харченко Володимир Петрович, Мухіна Марина Петрівна
МПК: G01S 19/00, G01C 21/10, G01C 21/00
Мітки: визначення, параметрів, спосіб, орієнтації, гіроакселерометричний, кутової
Формула / Реферат:
Гіроакселерометричний спосіб визначення параметрів кутової орієнтації, що включає вимірювання проекцій абсолютного лінійного прискорення з використанням акселерометрів та вимірювання проекцій вектора земної швидкості та складових коріолісового та відносного прискорення з використанням гіроскопічних датчиків кутових швидкостей, який відрізняється тим, що значення крену та тангажа обчислюють за інформацією акселерометрів, що має високочастотну...
Спосіб визначення кутової орієнтації об’єкта
Номер патенту: 36404
Опубліковано: 16.04.2001
Автори: Маринич Юрій Михайлович, Збруцький Олександр Васильович, Нестеренко Олег Іванович
МПК: G01C 19/00
Мітки: спосіб, визначення, кутової, орієнтації, об'єкта
Текст:
...і перпендикулярні головній осі гіроскопа, по кутам відхилення об'єкта відносно головної осі гіроскопа визначають кути і тангажу об'єкта, згідно з винаходом вводиться те, що додатково вимірюють управляючі моменти гіроскопа та визначають кут курсу за формулою: (19) UA (11) 36404 (13) A де K – кут к урсу об'єкта; M y1, M y 2 – управляючі моменти гіроскопа. 36404 K = arctg M y1 M y2 взаємоортогональних площинах у напрямку до...
Спосіб визначення орієнтації космічного апарата
Номер патенту: 104831
Опубліковано: 11.03.2014
Автори: Олійник Сергій Вікторович, Плаксій Юрій Андрійович, Кузнєцов Юрій Олексійович, Лабазов Олег Олександрович
МПК: B64G 1/24, G01C 21/24
Мітки: космічного, орієнтації, апарата, спосіб, визначення
Формула / Реферат:
Спосіб визначення тривісної орієнтації космічного апарата, який полягає в тому, що після погашення кутової швидкості апарата вимірюють приріст вектора кута повороту космічного апарата і за виміряними значеннями за такт розрахунку обчислюють половину приросту вектора кута повороту за такт, визначають кватерніон повороту за такт шляхом додавання до одиниці половини приросту вектора кута повороту, а потім визначають тривісну орієнтацію...
Спосіб підвищення точності визначення параметрів руху космічного апарата
Номер патенту: 56376
Опубліковано: 10.01.2011
Автори: Ожінський Віктор Васильович, Парфенюк Василь Григорович, Топольницький Павло Петрович, Загорулько Олександр Миколайович
МПК: G05B 17/00
Мітки: визначення, спосіб, космічного, параметрів, апарата, підвищення, точності, руху
Формула / Реферат:
Спосіб підвищення точності визначення параметрів руху космічного апарата, який відрізняється тим, що в апаратурі супутникової навігації дані із навігаційного обчислювача надходять до блока робастної обробки, який проводить їх згладжування з використанням завадостійких (робастних) статистичних процедур та видає уточнені параметри руху космічного апарата.
Спосіб визначення орієнтації осі свердловини

Номер патенту: 30032
Опубліковано: 15.11.2000
Автори: Анупрієнко Генадій Єфремович, Карпачов Юрій Андрійович, Гусєв Олексій Володимирович, Рудик Юрій Микитович
МПК: E21B 47/02, E21B 47/00, G01C 9/00
Мітки: свердловини, осі, спосіб, визначення, орієнтації
Формула / Реферат:
1. Спосіб визначення орієнтації осі свердловини, який містить операції вимірювання проекцій вектора сили тяжіння та проекцій вектора абсолютної кутової швидкості обертання Землі на ортогональні осі системи координат гіроскопічного інклінометра, розташованного в свердловині, який відрізняється тим, що на поверхні свердловини вибирають систему координат oxyz, де вісь oz спрямована по вертикалі Землі, а в площині yoz розташований вектор
Попередній патент: Спосіб виготовлення резорбуючих монолітних полімерних мембран для реконструкції коміркової частини щелеп
Наступний патент: Очисник головок коренеплодів
Випадковий патент: Спосіб вимірювання пікової напруги електричних імпульсів та пристрій для його реалізації