Спосіб навчання динамічної системи термінальному управлінню в умовах завад
Номер патенту: 49937
Опубліковано: 11.05.2010
Автори: Кучеров Дмитро Павлович, Іванов Борис Павлович, Левицький Ігор Святославович, Мельник Олександр Дмитрович, Сендецький Микола Миколайович, Копилова Зінаїда Миколаївна, Комаров Володимир Олексадрович

Формула / Реферат
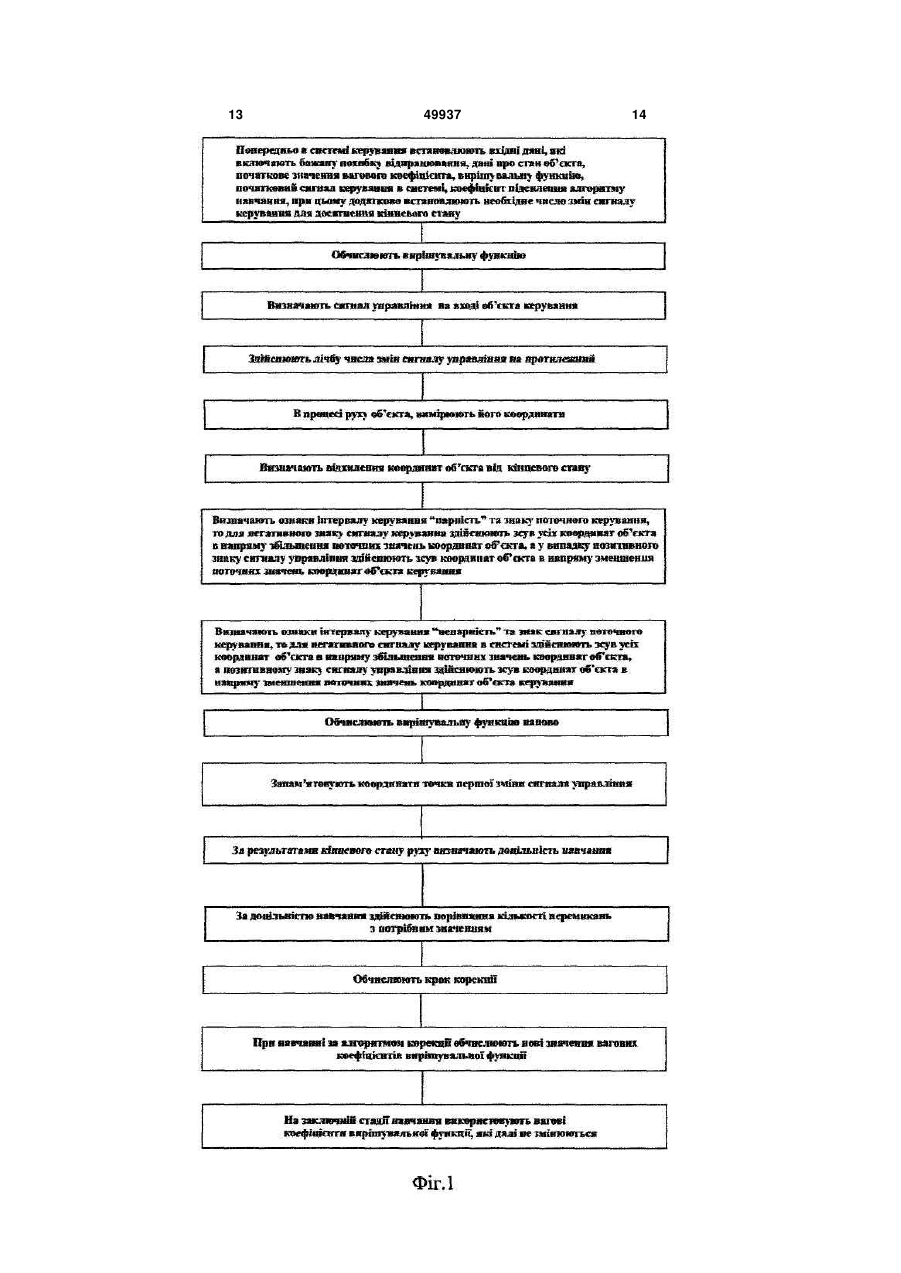
1. Спосіб навчання динамічної системи термінальному управлінню в умовах завад, при якому попередньо в системі керування встановлюють вхідні дані, які включають бажану похибку відпрацювання завдання об'єктом керування, дані про стан об'єкта, початкове значення вагового коефіцієнта, розв'язувальну функцію, початковий сигнал керування в системі, коефіцієнт підсилення алгоритму навчання, після зазначеного обчислюють розв'язувальну функцію, визначають сигнал управління на вході об'єкта керування, в процесі руху об'єкта вимірюють координати об'єкта керування, визначають відхилення координат об'єкта керування від кінцевого стану, в разі недосягнення обчислюють розв'язувальну функцію наново, за результатами кінцевого стану руху визначають доцільність навчання, при навчанні за алгоритмом корекції обчислюють нові значення вагових коефіцієнтів контролера, а на заключній стадії навчання використовують вагові коефіцієнти контролера, які далі не змінюються, який відрізняється тим, що в системі керування додатково встановлюють необхідне число змін знака сигналу керування для досягнення кінцевого стану, після виконання заходів щодо визначення сигналу управління на вході об'єкта керування здійснюють лічбу числа змін знака сигналу керування на протилежний, після виконання заходів щодо відхилення координат об'єкта керування від кінцевого стану визначають ознаки інтервалу керування "парність" та знак поточного сигналу керування, визначають ознаки інтервалу керування "непарність" та знак поточного сигналу керування, після визначення ознак інтервалу керування "парність" та "непарність" здійснюють зсув координат об'єкта керування, запам'ятовують координати точки першої зміни знака сигналу управління, а при виконанні заходів щодо визначення доцільності навчання здійснюють, за доцільністю навчання, порівняння кількості перемикань з потрібним значенням кількості та обчислюють крок корекції.
2. Спосіб за п. 1, який відрізняється тим, що якщо об'єкт не досягнув кінцевого стану, то для "парного" числа перемикань і негативного знака сигналу керування в системі здійснюють зсув усіх координат об'єкта в напряму збільшення поточних значень координат об'єкта, а для "парного" числа перемикань і позитивного знака сигналу керування здійснюють зсув координат об'єкта в напряму зменшення поточних значень координат об'єкта керування.
3. Спосіб за п. 1, який відрізняється тим, що при "непарному" числі змін перемикань і позитивному знаку сигналу керування в системі здійснюють зсув усіх координат об'єкта в напряму зменшення поточних значень координат об'єкта керування, а при "непарному" числі змін перемикань і негативному знаку сигналу керування, здійснюють зсув координат об'єкта в напряму збільшення поточних значень координат об'єкта керування.
Текст
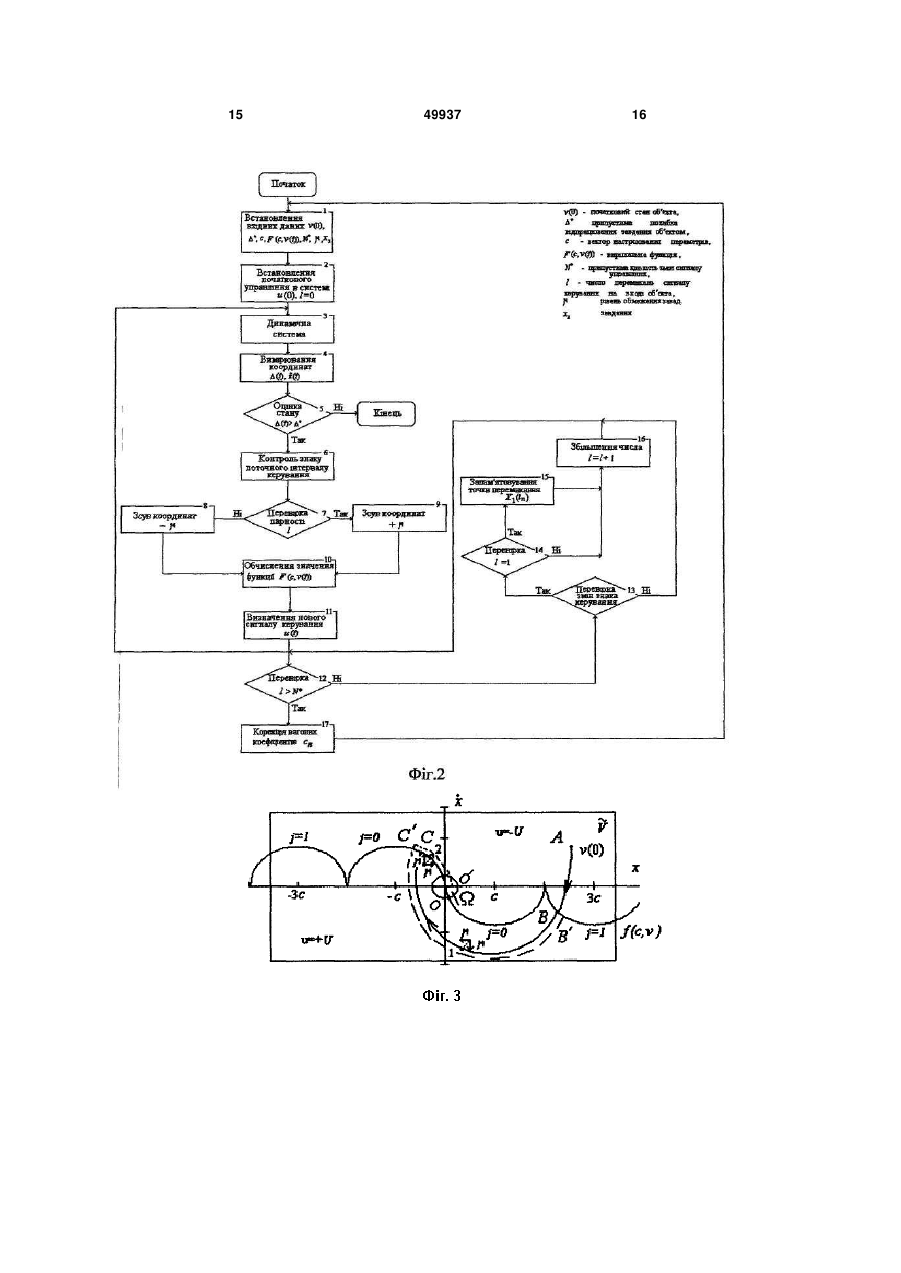
1. Спосіб навчання динамічної системи термінальному управлінню в умовах завад, при якому попередньо в системі керування встановлюють вхідні дані, які включають бажану похибку відпрацювання завдання об'єктом керування, дані про стан об'єкта, початкове значення вагового коефіцієнта, розв'язувальну функцію, початковий сигнал керування в системі, коефіцієнт підсилення алгоритму навчання, після зазначеного обчислюють розв'язувальну функцію, визначають сигнал управління на вході об'єкта керування, в процесі руху об'єкта вимірюють координати об'єкта керування, визначають відхилення координат об'єкта керування від кінцевого стану, в разі недосягнення обчислюють розв'язувальну функцію наново, за результатами кінцевого стану руху визначають доцільність навчання, при навчанні за алгоритмом корекції обчислюють нові значення вагових коефіцієнтів контролера, а на заключній стадії навчання використовують вагові коефіцієнти контролера, які далі не змінюються, який відрізняється тим, що в системі керування додатково встановлюють необхідне число змін знака сигналу керування для до U 2 UA 1 3 49937 4 після встановлення вхідних даних обчислюють Найбільш близьким технічним рішенням, як по виріпіувальну функцію з вільними ваговими коефісуті, так і за задачами, що вирішуються, який обцієнтами, за її знаком визначають знак сигналу рано за найближчий аналог (прототип), є спосіб управління на вході об'єкта керування, в процесі навчання динамічної системи термінальному руху об'єкта вимірюють величину, що є сумою управлінню в умовах завад, при якому попередньо квадратів кутових швидкостей, які є керованими в системі керування встановлюють вхідні дані, які координатами та вісі обертання яких перпендикувключають бажану похибку відпрацювання залярні вісі симетрії супутника, визначають чи досявдання об'єктом керування, дані про стан об'єкта, гнув об'єкт керування кінцевого стану, в разі недорозв’язувальну функцію, початкове значення вагосягнення обчислюють розв’язувальну функцію вого коефіцієнта розв’язувальної функції, початконаново, за результатами кінцевого стану руху вивий сигнал керування в системі, коефіцієнт підсизначають доцільність навчання, при навчанні за лення алгоритму навчання, після зазначеного алгоритмом корекції обчислюють нові значення обчислюють розв’язувальну функцію, визначають для вирішувальної функції, а на заключній стадії сигнал управління на вході об'єкта керування, в навчання використовують коефіцієнти вирішувапроцесі руху об'єкта вимірюють координати об'єкта льної функції, яаа. далі не змінюються [1]. керування, визначають відхилення координат об'єСпосіб використано для побудови оптималькта керування від кінцевого стану, в разі недосягного за часом управління космічним літальним нення обчислюють розв’язувальну функцію наноапаратом - супутником. Керовані координати не во, за результатами кінцевого стану руху доступні для виміру, але величина, що пов'язана з визначають доцільність навчання, при навчанні за ними, вимірюється з адитивним шумом, який не є алгоритмом корекції обчислюють нові значення Гаусовим та може бути й небілим випадковим вагових коефіцієнтів контролера, а на заключній процесом. Вимір цієї величини здійснюється через стадії навчання використовують вагові коефіцієнти рівні відрізки часу. З метою застосування алгоритконтролера, які далі не змінюються [2]. му "персептронного" типу використовується десять Недоліком відомого способу навчання, який послідовних вимірів та відповідно десять вагових обрано за найближчий аналог (прототип), є відсуткоефіцієнтів вирішувальної функції. Особливістю ність врахування в навчанні завадового шуму. Цей способу є навчання системи в умовах відсутності недолік унеможливлює виключення хибних перешумів та використання знайдених ваг в умовах микань сигналу управління. реальних вимірювань, тобто в умовах шуму. Лінія, В основу способу навчання динамічної систещо розділяє сигнали управління різних класів, є ми термінальному управлінню в умовах завад за ряд півкіл рівного радіусу, що примикають один до винаходом покладено завдання шляхом усунення одного в площині, яку утворюють керовані координедоліків прототипу забезпечити настроювання нати супутника. При цьому один ряд цих півкіл вагових коефіцієнтів за рахунок введення в алголежить у другому квадранті площини, а другий ряд ритм спеціальної логіки, за якою здійснюється зсув у третьому. Управління здійснюється в межах координат об'єкта та подальше використання нопершого півкола класів управлінь, які примикають вих значень координат в законі керування. до початку координат координатної площини. Суть способу навчання динамічної системи Встановлено, що похибка перемикання (зміна знатермінальному управлінню в умовах завад, при ка) сигналу керування не перевищує двох послідоякому попередньо в системі керування встановвних інтервалів вимірювання. люють вхідні дані, які включають бажану похибку До недоліків відомого способу навчання динавідпрацювання завдання об'єктом керування, дані мічної системи розпізнаванню ситуацій управління про стан об'єкта, початкове значення вагового відноситься те, що в відомому способі навчання коефіцієнта, розв’язувальну функцію, початковий здійснюється без шуму, в межах першого півкола, сигнал керування в системі, коефіцієнт підсилення що примикає до початку координат. Це говорить алгоритму навчання, після зазначеного обчислюпро те, що цей спосіб навчання не виключає хибють розв’язувальну функцію, визначають сигнал них змін сигналу управління в умовах завад, що управління на вході об'єкта керування, в процесі приводить до збільшення часу керування. У відоруху об'єкта вимірюють координати об'єкта керумому способі навчання системи термінального вання, визначають відхилення координат об'єкта управління послідовні Інтервали вимірювання кокерування від кінцевого стану, в разі недосягнення ординат руху супутника узгоджені з рівнем шуму. обчислюють розв’язувальну функцію наново, за Неузгодженість рівня шуму з інтервалом вимірюрезультатами кінцевого стану руху визначають вання приводить до зменшення кількості точок доцільність навчання, при навчанні за алгоритмом вимірювання, які потрібні для досягнення необхідкорекції обчислюють нові значення вагових коефіної точності керування. Зменшення кількості точок, цієнтів контролера, а на заключній стадії навчання що належать до одного з класів сигналів управлінвикористовують вагові коефіцієнти контролера, які ня, веде до хибних змін сигналу управління і, як далі не змінюються, полягає в тому, що в системі наслідок, до збільшення часу керування. Непряме керування додатково встановлюють необхідне вимірювання координат системи приводить до число змін знаку сигналу керування для досягненштучного збільшення рівня шуму, який дійсно ня кінцевого стану, після виконання заходів щодо впливає на процес керування в системі. Збільшенвизначення сигналу управління на вході об'єкта ня рівня шуму також приводить до збільшення керування здійснюють лічбу числа змін знака сигміри відхилення вихідної величини динамічної сисналу керування на протилежний, після виконання теми. заходів щодо відхилення координат об'єкта керування від кінцевого стану визначають ознаки Інте 5 49937 6 рвалу керування 'Парність" та знак поточного сигкоординат об'єкта керування, а при "непарному" налу керування, визначають ознаки інтервалу кечислі змін перемикань і негативному знаку сигналу рування "непарність" та знак поточного сигналу керування, здійснюють зсув координат об'єкта в керування, після визначення ознак інтервалу керунапряму збільшення поточних значень координат вання "парність" та "непарність" здійснюють зсув об'єкта керування. координат об'єкта керування» запам'ятовують коТаким чином, спосіб навчання динамічної сисординати точки першої зміни знаку сигналу управтеми термінальному управлінню в умовах завад, ління, а при виконанні заходів щодо визначення який заявляється, відповідає критерію корисної доцільності навчання здійснюють, за доцільністю моделі "новизна". навчання, порівняння кількості перемикань з потСуть способу навчання динамічної системи рібним значенням кількості та обчислюють крок термінальному управлінню в умовах завад, який корекції. Суть корисної моделі полягає І в тому, що заявляється, пояснюється за допомогою ілюстраякщо об'єкт не досягнув кінцевого стану, то для цій, на фіг. 1 показана блок-схема виконання пос"парного" числа перемикань і негативного знаку лідовності технологічних операцій, які у сукупності сигналу керування в системі здійснюють зсув усіх являють собою суть способу навчання динамічної координат об'єкта в напряму збільшення поточних системи термінальному управлінню в умовах зазначень координат об'єкта, а для "парного" числа вад, який заявляється, на фіг. 2 показано послідоперемикань і позитивного знаку сигналу керування вність дій виконання способу, що заявляється, на здійснюють зсув координат об'єкта в напряму змефіг. 3 показаний приклад руху системи, на якому ншення поточних значень координат об'єкта керупояснюється принцип виключення впливу обмевання. Суть корисної моделі полягає також і в тожених завад, на фіг. 4 приведено структурну схему му, що при "непарному" числі змін перемикань і пристрою, що реалізує спосіб, який заявляється, позитивному знаку сигналу керування в системі на фіг. 5 приведено динаміку об'єкта керування за здійснюють зсув усіх координат об'єкта в напряму відсутністю завад в системі за умови вимірювання зменшення поточних значень координат об'єкта координат динамічної системи і сигналу керування керування, а при "непарному" числі змін перемиу часовій площині, на фіг. 6 показано динаміку того кань і негативному знаку сигналу керування здійсж об'єкту при "хибних" змінах сигналу керування в нюють зсув координат об'єкта в напряму збільчасовій площині, на фіг. 7 приведено "коливальшення поточних значень координат об'єкта ний" режим роботи системи для випадку вимірюкерування. вання двох координат у площині похибкаПорівняльний аналіз технічного рішення з прошвидкість, що має місце на початку навчання дитотипом дозволяє зробити висновок, що спосіб намічної системи, на фіг. 8 показано динаміку об'єнавчання динамічної системи термінальному кта керування динамічної системи після проведенуправлінню в умовах завад, який заявляється, ня навчання за винаходом в площині похибкавідрізняється тим, що в системі керування додатшвидкість, на фіг. 9 показано квазіоптимальну за ково встановлюють необхідне число змін знаку швидкодією траєкторію об'єкта керування у часосигналу керування для досягнення кінцевого ставій площині після проведення навчання за винану, після виконання заходів щодо визначення сигходом, на фіг. 10 показано процес настроювання налу управління на вході об'єкта керування здійсвагового коефіцієнта контролера керуючої частинюють лічбу числа змін знака сигналу керування ни. на протилежний, після виконання заходів щодо Спосіб навчання динамічної системи термінавідхилення координат об'єкта керування від кінцельному управлінню в умовах завад реалізується вого стану визначають ознаки інтервалу керування таким чином (див. блок-схеми на фіг. 1 і фіг. 2). "парність" та знак поточного сигналу керування, Попередньо в системі керування встановлювизначають ознаки інтервалу керування "непарють вхідні дані, які включають бажану похибку відність" та знак поточного сигналу керування, після працювання завдання объектом керування, дані визначення ознак інтервалу керування "парність" про стан об'єкта, початкове значення вагових коета "непарність" здійснюють зсув координат об'єкта фіцієнтів вирІшувальної функції, розв’язувальну керування, запам'ятовують координати точки перфункцію, початковий сигнал керування в системі, шої зміни знаку сигналу управління, а при викокоефіцієнт підсилення алгоритму навчання, при нанні заходів щодо визначення доцільності нацьому додатково встановлюють необхідне число вчання здійснюють, за доцільністю навчання, змін знаку сигналу керування для досягнення кінпорівняння кількості перемикань з потрібним знацевого стану. При виконанні зазначеної технологіченням кількості та обчислюють крок корекції, при чної операції встановлюють: значення похибки *, цьому якщо об'єкт не досягнув кінцевого стану, то початковий стан (0), розв’язувальну функцію F(c, для "парного" числа перемикань і негативного зна(0), початкові значення її вагових коефіцієнтів со, ку сигналу керування в системі здійснюють зсув величину зсуву , кількість змін сигналу управлінусіх координат об'єкта в напряму збільшення поня N*, початкове число змін знаку керування в систочних значень координат об'єкта, а для "парного" темі I = 0, завдання xз. По закінченню вищезазначисла перемикань і позитивного знаку сигналу чених заходів обчислюють розв’язувальну функцію керування здійснюють зсув координат об'єкта в F(c, (f)). Продовжують технологічний процес тим, напряму зменшення поточних значень координат що визначають сигнал управління на вході об'єкта об'єкта керування, причому при "непарному" числі керування сигнал u(0). Після цього здійснюють змін перемикань і позитивному знаку сигналу келічбу числа змін l знака сигналу керування на прорування в системі здійснюють зсув усіх координат тилежний. В процесі руху об'єкта вимірюють коороб'єкта в напряму зменшення поточних значень динати об'єкта керування (t). Продовжують тех 7 49937 8 нологічний процес тим, що визначають ознаки інкерування з +U на -U, що є небажаним. Для витервалу керування "парність" та знак поточного ключення дії завади на першому інтервалі керусигналу керування. При цьому якщо об'єкт не до вання від координат об'єкта x , x віднімається сягнув кінцевого стану, то для "непарного" числа постійна величина . Це приводить до отримання перемикань і негативного знаку сигналу керування нових координат зображувальної точки об'єкта в системі здійснюють зсув усіх координат об'єкта в керування, за якими формується сигнал керування напряму збільшення поточних значень координат знаку +U, як і повинно бути при знаходженні зооб'єкта, а у випадку "парного" числа перемикань і бражувальної точки в області керувань +U. В точці негативного знаку сигналу керування здійснюють 2 показано інший випадок, коли зображувальна зсув координат об'єкта в напряму збільшення поточка знаходиться на другому інтервалі керування точних значень координат об'єкта керування, тобта дія сигналу завади теж приводить до хибної то зміни знаку керування. В цьому випадку до кожної (1) (t) = vок + (t) + , координати х, х об'єкту керування додається посПри цьому при "непарному" числі змін перемитійна величина ц. Спосіб формує в площині х, х кань І позитивному знаку сигналу керування в сиснову траєкторію руху зображувальної точки ABB 'С темі здійснюють зсув усіх координат об'єкта в наС' O'. На фіг. 3 символом О позначено область пряму зменшення поточних значень координат досягнення зображувальної точки. объекта керування, а при "парному" числі змін Спосіб виключення завад в системі термінальперемикань і позитивному знаку сигналу керуванного керування об'єктом керування реалізують за ня, здійснюють зсув координат об'єкта в напряму допомогою пристрою, який містить (див. фіг. 4), як зменшення поточних значень координат об'єкта варіант конструктивного виконання, виконавчу керування, тобто частину 1, що складається з контролера 2, релей(2) (t) = ок(t) - . ного елемента 3, об'єкт керування 4, вимірювальну за новими координатами обчислюють значенчастину 5, що складається з датчика положення 6, ня вирішувальної функції F(c, (t)). По завершенню датчика швидкості 7, обчислювача похибки 8, котехнологічних операцій, які передбачають визнадуючих блоків 9, 10, пристрій логіки 11, що складачення ознак інтервалу керування "непарність" і ється із лічильника числа перемикань 12, блоку "парність" та знаку сигнала керування на поточнопам'яті знаку поточного керування 13, компаратому інтервалі продовжують технологічний процес ра похибки 14, блоку встановлення кількості змін тим, що запам'ятовують координати точки першого знаку сигналу управління 15, блоку логіки 16, блоперемикання. Після запам'ятовування координати ку зупинки та початкових установок 17, навчаючу точки першого перемикання визначають, чи досягчастину 18, що складається з блоку запам'ятовунув об'єкт керування кінцевого стану, тобто з'ясовання точки першої зміни знаку сигналу управління 19, блоку навчання 20, блоку встановлення вують про належність координат (t) області досявагових коефіцієнтів 21. гнення . В разі недосягнення обчислюють Конструктивно вихід контролера 2 зв'язаний зі розв’язувальну функцію Fc, (t)) наново. входом об'єкта керування 4 через релейний елеЗа результатами кінцевого стану (t) руху, тобмент 3. Вихід об'єкта керування 4 конструктивно то коли (t) *, визначають доцільність навчання зв'язаний зі входами датчиків положення 6 та шляхом порівняння величин l та N* та обчислюють швидкості 7. Вихід датчику положення 6 зв'язаний крок корекції с = f( , сn, (t)). Далі, а саме, при з сигнальними входами (t) контролера 2 через навчанні, за алгоритмом корекції обчислюють нові обчислювач похибки 8 та кодуючий блок 10, а визначення вагових коефіцієнтів контролера хід датчика швидкості 7 з сигнальними входами (3) cn = cn-1 + с. x( t ) контролера 2 через кодуючий блок 9. Для На заключній стадії навчання використовують вагові коефіцієнти вирішувальної функції, які далі реалізації способу виключення впливу обмежених не змінюються. завад на процес керування об'єктом пристрій доПринцип виключення впливу обмежених завад датково містить лічильник числа змін знаку керув системі термінального управління, що заявлявання 12, вхід якого зв'язаний з виходом релейноється, показано на фіг. 3. Зображувальна точка го елементу 3, а вихід з блоком логіки 16. Вихід релейного елемента 3 зв'язаний зі входом блоку об'єкта керування в фазовій площині ( x, x) в почапам'яті знаку поточного керування 13, вихід, якого тковому стані знаходиться в точці А. Оптимальна зв'язаний із блоком логіки 16. Компаратор похибки за часом траєкторія в цій площині пролягає за лі14, інформаційний вхід, якого зв'язаний із виходом нією АВСО. Зміна знаку керуючої дії здійснюється блоку 10, а вихід з блоком логіки 16. Вихід блоку на лінії f(с, ), яка являє собою ряд півкіл, одна логіки 16, зв'язаний зі входами управління контрочастина якого знаходиться нижче вісі х, інша часлера 2. Пристрій, як варіант конструктивного викотина знаходиться вище вісі х. Обидві частини рознання, може додатково містити блок зупинки та ділені віссю x . При цьому на ділянці АВ (нульовий початкових установок 17, вхід якого зв'язаний з інтервал керування) сигнал керування має негативиходом компаратора похибки 14, а вихід 17 підквний знак u=-U, на ділянці ВС (перший інтервал лючений до входу початкового встановлення конкерування) сигнал керування має протилежний тролера 2, лічильника числа змін знаку керування знак u=+U та на кінцевій ділянці СО (другий інтер12, блоку пам'яті поточного керування 13 та об'єквал керування) сигнал керування знову має негата керування 4. Виходи кодуючих блоків 9, 10 витивний знак -U, результат дії завад показаний в мірювальної частини зв'язані з сигнальними вхоточках 1,2 - див. фіг. 3. В точці 1 дія сигналу завадами блоку запам'ятовування точки першої зміни ди на ділянці ВС приводить до зміни знаку сигналу 9 49937 10 знаку сигналу управління 19, інший вхід якого зв'яконтролеру 2 (фіг. 4). При цьому блок логіки 16 заний з виходом лічильника числа перемикань 12. обирає знак поправки, а контролер 2 здійснює зсув Входи блоку навчання 20 зв'язані з виходами лічивимірюваних координат об'єкта керування 4 за льника числа перемикань 12 та виходом блоку допомогою арифметичних операцій додавання та запам'ятовування 19. Виходи блоку навчання 20 віднімання. зв'язані зі входами вагових коефіцієнтів через блок За ознаками "парності"-"непарності" інтервалу 21. керування, номер якого поступає з блоку 12, та Пристрій, за допомогою якого реалізується знаком поточного керування в системі термінальспосіб впливу обмежених завад в системі термінаного керування з блоку 13 до блоку логіки 16 подального керування для динамічних об'єктів, працює ється сигнал» за яким в контролері 2 визначається таким чином. напрям зсуву поточних координат об'єкту керуванПеред початком роботи системи керування ня. При цьому в контролері 2 використовуються (див. фіг. 4) встановлюють бажане значення похиінші, нові координати стану об'єкта керування, що визначаються виразами (1), (2). бки *, кількість змін сигналу управління N*, початРелейний елемент комутує напругу величиною кове число змін знаку керування в системі l=0. +U або -U на вхід об'єкта керування 4 за законом Встановлюють також початкові значення вагових (4). В (4) третій вираз в правій частині означає, що коефіцієнтів со контролера. Вважається, що об'єкт керуюча дія u(t) виключається, якщо фазові коорзнаходиться в початковому стані (0). На вхід сисдинати об'єкта керування досягають області . теми подають завдання xз для відпрацювання. Керуюча дія u(t) з моменту t = 0 до кінцевого tк Момент часу t подачі завдання на систему керупримушує об'єкт рухатися в сторону зменшення вання вважають за початковий, тобто t=0. З цього моменту здійснюють розрахунок похибки і швидкопохибки (t)=xз - х (t). сті відпрацювання за допомогою датчиків полоРезультати, які представлені на Фіг. 5-9, досження 6, швидкості 7 та обчислювача похибки 8. їх ліджувалися для випадку динамічної системи з значення поступають на кодуючі блоки 9, 10, які одним невідомим параметром, вирішувальна фунперетворюють поточні значення похибки положенкція якої має вид ня та швидкості об'єкта керування в цифровий код. F j ( (t), c ) x( t ) c 2 ( ( t ) (2 j 1)c )2 0 , (6) Код похибки та положення поступає на інформа ційні входи (t) і x( t ) контролера 2, який за даниде c - невідомий ваговий коефіцієнт контро лера, j - номер півкола. ми коефіцієнтів с і даними виміру (t), x( t ) обчисПовільний вибір вагового коефіцієнта с для лює значення функції F(c, (t)), де (t) - вектор, об'єкта керування в (6), що розглядається може компоненти якого складаються з цифрового коду приводити до таких ситуацій роботи системи: сигналів (t)=хз(t)-(t) і x( t ) . Ця функція в фазовому 1) режим автоколивань (див. Фіг. 7) просторі має назву лінії перемикань в площині 2) попадання об'єктом в коло припустимих по ( , x) . Знак функції F(c, (t)) буде визначати знак хибок (t ) * за мінімальний час відпрацювансигналу керування u(t\ який формує релейний ня завдання (див. Фіг. 8, 9). елемент 3, а саме Перша ситуація є хибною, остання є бажаною U, якщо F(c, (t)) (порІвн. - оптимальну траєкторію объекта - див. , u( t ) U, якщо F(c, (t)) фіг. 5 і фіг. 9). (4) Навчання проводилося за правилом, якщо (t) 0, якщо x та ( t ) фазові координати (t) динамічної системи наприУ випадках, коли рух об'єкта керування здійскінці експерименту знаходяться в області досяжнюється вздовж лінії, що розділяє сигнали управності , то корекції вагового коефіцієнту сn не відлінь різних знаків, зображувана точка знаходиться бувається, у протилежному випадку завжди в околиці функції F(-) тоді знак сигналу керування відбувається корекція с за виразом визначається знаком сигналу датчика швидкості 7 dF( , c ) , (7) cn Pr cn 1 [g ( n, cn 1) wn ] так dc ( ( tn ), cn 1) U, якщо F( (t), c ) ,x 0 де u( t ) , (5) U, якщо F( (t), c ) ,x 0 1 якщо l N * , wn 1 якщо за l N * перемикань u( t ) вектор ( t ) , , (8) Величина 5 в (4), (5) вводиться з метою вине попадає в ключення впливу похибок округлення та усікання при проведенні розрахунків за допомогою контролера, в якому число представляється обмеженою 2 F( , c ) , ( z, c ) arctg (9) кількістю розрядів. З виходу релейного елементу напруга величи- коефіцієнт підсилення алгоритму навчанною +U або -U подається на вхід об'єкта керування 0 . Знак Pr в (7) – означає проектування ня, 4 за законами (4), (5). Керуюча дія n(t) примушує об'єкт рухатися в сторону зменшення похибки (t). значень, що отримані в результаті алгоритму (7), Відсутність зони нечутливості або встановленна область допустимих: значень, яка має вид =[1, ня зони нечутливості визиває хибні зміни сигналу df( ) + ) . Символ в (7) означає похідну від керування (див. фіг. 5). Виключення хибних змін dc знаку керування здійснюється блоком логіки 16 та 11 49937 12 ню шляхом послідовності експериментів. За їх рефункції f ( ) . Вираз (8) формально інтерпретує вказультатами формуються нові значення параметрів зівки зовнішнього вчителя в алгоритмі (7), є - мала для керуючої частини. В пристрої, що навчає, є величина в (9), що встановлюється конструктором інформація про "якісне" відпрацювання завдання системи, 0 < < 1. динамічною системою. Зазначену інформацію інПрава частина алгоритму (7) складається з терпретовано як вказівки зовнішнього "вчителя". двох доданків. Перший доданок - це попереднє Завдання "вчителя" - навчити динамічну систему значення вагового коефіцієнта, другий доданок правильному розпізнаванню одному з двох сигнакрок, з яким потрібно здійснювати корекцію коефілів управління в умовах руху, що склалися. цієнта с. Робота системи закінчується, якщо задоСпосіб навчання, який заявляється, оснований вольняється вимога влучення координат об'єкту в на алгоритмі "персептронного" типу, в якому вхідкінцевий стан (t) , при цьому * (див. фіг. 9). на інформація класифікується на два класи. Згідно Типовий характер зміни вагового коефіцієнта с цього алгоритму компоненти вхідного вектора, що контролера 2 в процесі управління показаний на підлягають класифікації, з відповідною вагою фіг. 10. складуються. Вхідна інформація належить до При вимкненні системи здійснюється операція першого класу, якщо вагова сума має негативний переводу об'єкту керування в початковий стан (0) знак і вихідний сигнал приймає значення -1, якщо за допомогою сигналів блоку зупинки та початкосума має протилежний знак чи рівна нулю, то вивих установок 17. По команді з блока 17 в початхідний сигнал персептрону має вихідний сигнал +1 ковий стан встановлюється контролер 2, лічильник і належить до другого класу. Умови, за якими вихі12, блок пам'яті 13 та здійснюється гальмування дний сигнал має приймати значення +1 чи -1, є объекта керування 4. інформацію зовнішнього "вчителя". Якщо отримуРезультат випробування способу, що заявляється вірний результат, то ваги не змінюються, ється, можна відстежити за графіками на фіг. 5-9. якщо результат хибний, тобто не відповідає інфоТак, на фіг. 5 рух об'єкта керування зі значенням рмації вчителя, то відповідним чином змінюються вагового коефіцієнта рівному оптимальному знаваги. Вірне розпізнавання образів різних класів ченню cопт = 0,2, на фіг. 7 представлено встановдосягається відсутністю перетину класів образів лення вагового коефіцієнта контролера повільним (відсутність спільних точок в різних класах), що чином c0 = 1,8, що привело до коливального рерозділені розділяючою поверхнею (поверхні пережиму динамічної системи. Після завершення промикання знаку сигналу управління). Сигнали цесу навчання отримано квазіоптимальний за управління для системи термінального управління швидкодією процес керування (див. фіг. 8, 9). Порозділені на два класи, якщо сигналу позитивного рівняння оптимального режиму (див. фіг. 5) з квазнаку надати значення +1, а негативного знаку -1. зіоптимальним (див. фіг. 9) дозволяє оцінити проЗавдання процесу навчання динамічної системи граш в тривалості коливального режиму, термінальному управлінню - побудова лінії переотриманого за рахунок навчання, він не перевищує микань, що вірно розділяє сигнали управління різ11 %. Застосування зсуву координат для виклюних класів. Особливістю навчання системи, що чення завад дозволяє зменшити тривалість керузаявляється, в конструктивному виконанні є необвання на 33 % (див. фіг. 6 та фіг. 9). Процес нахідність настроювання контролера за результатавчання тривав n = 222, послідовних ітерацій, в ми певної кількості експериментів. результаті отримано ваговий коефіцієнт контролеПідвищення ефективності застосування спора с222 = 0,202, що відповідає квазіоптимальному собу навчання динамічної системи термінальному процесу управління динамічної системи. управлінню в умовах завад, який заявляється, у Таким чином, спосіб управління динамічною порівнянні з прототипом, полягає в тому, що на системою, що вирішує термінальне завдання, тобвідміну від прототипу в способі, що заявляється, то завдання доставки її фазових координат до забезпечується управління динамічною системою кінцевого стану за визначений час, за умови відсув умовах завад, які не є Гаусовим шумом, без хибтності апріорної Інформації про параметри динаних змін сигналу управління, а на відміну від анамічної системи чи їх зміни, реалізується за рахунок логу в системі навчання, що заявляється, отримудинамічної системи, що складається з інформаємо процес навчання, в якому інтервали ційної, керуючої частин та об'єкту керування. Осовимірювання не є узгодженими з завадами, набливістю системи є застосування в керуючій часвчання здійснюється не тільки в межах першого тині сигналу управління максимальної амплітуди, півкола, що примикає до початку координат. знак якого змінюється на протилежний за необхідДжерела інформації ністю. Цей факт дозволяє класифікувати, в термі1. Knoll A.L. Experiments with a pattern classifier нах теорії розпізнавання образів (ситуацій управon an optimal control problem / A.L. Knoll // IEEE ління), сигнали управління на два класи. До Trans. on Automatic. Control. - 1965. - Vol. AC-10, № першого з них відносяться сигнали, що мають ма10. - P.479-480. - аналог. ксимальну амплітуду та позитивний знак, до друго2. Blackmore K.L. Learning nonlinearly го ж класу відноситься сигнал управління такої ж parameterized decision regions / K.L. Blackmore, амплітуди та негативного знаку. З метою забезпеR.C. Williamson, I.M.Y. Mareels // Journal of чення найменшого часу відпрацювання завдання в mathematical systems, estimation and control. - 1996. умовах невідомих чи змінних параметрів система - Vol. 6; № 1. - P. 129-132. -прототип. управління у своєму складі має пристрій, що навчає керуючу частину необхідному функціонуван 13 49937 14 15 49937 16 17 49937 18 19 49937 20 21 Комп’ютерна верстка Г. Паяльніков 49937 Підписне 22 Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюTeaching mode for termination control dynamic system in condition of noisy signals
Автори англійськоюKucherov Dmytro Pavlovych, Ivanov Borys Pavlovych, Kopylova Zinaida Mykolaivna, Melnyk Oleksandr Dmytrovych, Levytskyi Ihor Sviatoslavovych, Sendetskyi Mykola Mykolaiovych, Komarov Volodymyr Oleksandrovych
Назва патенту російськоюСпособ обучения динамической системы терминальному управлению в условиях помех
Автори російськоюКучеров Дмитрий Павлович, Иванов Борис Павлович, Копилова Зинаида Николаевна, Мельник Александр Дмитриевич, Левицкий Игорь Святославович, Сендецкий Николай Николаевич, Комаров Владимир Александрович
МПК / Мітки
МПК: G05B 11/00, G05B 13/00
Мітки: спосіб, системі, термінальному, навчання, завад, динамічної, умовах, управлінню
Код посилання
<a href="https://ua.patents.su/11-49937-sposib-navchannya-dinamichno-sistemi-terminalnomu-upravlinnyu-v-umovakh-zavad.html" target="_blank" rel="follow" title="База патентів України">Спосіб навчання динамічної системи термінальному управлінню в умовах завад</a>
Спосіб побудови адаптивної системи навчання
Номер патенту: 3619
Опубліковано: 15.12.2004
Автори: Лісной Андрій Іванович, Єрмоленко Олександр Володимирович, Ковальов Віктор Іванович, Серков Олександр Анатолійович
МПК: G09B 7/00
Мітки: навчання, спосіб, побудови, адаптивної, системі
Формула / Реферат:
Спосіб побудови адаптивної системи навчання, що включає до свого складу подачу навчального матеріалу, обчислення рейтингу знань учнів, порівняння рейтингу учнів з нормативним рейтингом, який відрізняється тим, що подача матеріалу здійснюється в структурованому вигляді з використанням аудіовізуальних кліпів, та за результатами аналізу тесту формується фрагмент інформації в залежності від рейтингу засвоєння матеріалу учнем.
Спосіб побудови моделі нелінійної динамічної системи
Номер патенту: 41143
Опубліковано: 15.08.2001
Автори: Гуртов Олександр Олександрович, Нащанський Олександр Анатолійович, Зубко Олег Олександрович, Серков Олександр Анатолійович, Горєлов Олександр Сергійович, Зєліков Всеволод Ілліч
МПК: G05B 23/02
Мітки: нелінійної, динамічної, системі, моделі, спосіб, побудови
Формула / Реферат:
Спосіб побудови моделі нелінійної динамічної системи, що включає до свого складу подачу тестуючих імпульсів, визначення реакції на тестуючий імпульс, який відрізняється тим, що додаткове тестування відбувається пакетом імпульсів, кількість яких у пакеті та часова відстань між ними змінюєтся під час тестування.
Спосіб корекції нестаціонарної динамічної системи
Номер патенту: 13004
Опубліковано: 15.03.2006
Автори: Долгін Ігор Володимирович, Долгін Володимир Прохорович
МПК: G05B 11/01
Мітки: корекції, нестаціонарної, спосіб, системі, динамічної
Формула / Реферат:
Спосіб корекції нестаціонарної динамічної системи, заснований на введенні ланок масштабування, корекції і зворотного зв'язку, який відрізняється тим, що вводять ланку послідовної корекції і задають її передавальну функцію, рівну зворотному значенню чисельника передавальної функції коректованої системи, яку охоплюють разом з коректованою системою ланкою зворотного зв'язку, що є форсуючою ланкою, порядок якої вибирають рівним порядку знаменника...
Спосіб підвищення мотивації до професійного навчання інвалідам в умовах центрів професійної реабілітації інвалідів
Номер патенту: 19266
Опубліковано: 15.12.2006
Автори: Кузнєцов Дмитро Анатолійович, Авраменко Микола Леонідович, Гладка Ірина Вікторівна
МПК: A61B 5/0476
Мітки: професійного, професійної, умовах, спосіб, навчання, центрів, інвалідам, мотивації, інвалідів, реабілітації, підвищення
Формула / Реферат:
Спосіб підвищення мотивації до професійного навчання інвалідам в умовах центрів професійної реабілітації інвалідів шляхом прослуховування музичних творів, призначення ароматерапії, який відрізняється тим, що проводять попереднє музичне тестування інваліда за допомогою порядкового прослуховування музичного твору Ф. Шопена Polonese in C sharp minor, музичного твору І. Штрауса Viennese Blood, музичного твору китайського походження Тай Ши,...
Пристрій визначення вектора початкового стану динамічної системи
Номер патенту: 15794
Опубліковано: 17.07.2006
Автори: Долгін Ігор Володимирович, Долгін Володимир Прохорович
МПК: G05B 5/00
Мітки: системі, стану, вектора, визначення, початкового, динамічної, пристрій
Формула / Реферат:
Пристрій визначення вектора початкового стану динамічної системи, що виконує аналіз її стану на основі вхідного сигналу і передавальної функції, який відрізняється тим, що введені послідовно сполучені модулі визначення компонентів вектора станів системи, що містять вхідний підсилювач з коефіцієнтом посилення, рівним коефіцієнту оператора дії, що має індекс, відповідний різниці порядку системи і порядку обчислюваної похідної, проміжні...
Попередній патент: Пінопластополіуретан
Наступний патент: Пальниковий пристрій
Випадковий патент: Пристрій для визначення межі міцності деревини при сколюванні поперек волокон