Спосіб адаптації стискального зусилля інтелектуального робота та ідентифікації напрямку проковзування об’єкта маніпулювання
Номер патенту: 68117
Опубліковано: 12.03.2012
Автори: Кондратенко Володимир Юрійович, Назарова Ірина Леонідівна, Кондратенко Галина Володимирівна, Кондратенко Юрій Пантелійович
Формула / Реферат
Спосіб адаптації стискального зусилля інтелектуального робота та ідентифікації напрямку проковзування об'єкта маніпулювання, згідно з яким переміщують захватний пристрій з принаймні двома затискними губками таким чином, щоб об'єкт маніпулювання знаходився між затискними губками захватного пристрою в центрованому відносно губок положенні, після чого здійснюють стискання губок у напрямку скорочення відстані між ними і реєструють інформацію про одночасне контактування обох затискних губок з об'єктом маніпулювання, після створення попередньо заданої величини мінімального стискального зусилля призупиняють процес стискання губок, а потім почергово здійснюють вертикальний спробний рух захватного пристрою за допомогою маніпуляційної системи інтелектуального робота, що забезпечує підйом захватного пристрою у вертикальному напрямку на попередньо визначену постійну величину з одночасним припиненням процесу стискання губок і з постійною реєстрацією за допомогою багатокомпонентної сенсорної системи інформації про проковзування об'єкта маніпулювання між губками захватного пристрою, та стискання губок для нарощування стискального зусилля на відповідну попередньо визначену постійну величину з одночасним припиненням процесу вертикального підйому захватного пристрою, у випадку відсутності інформації про проковзування об'єкта маніпулювання при виконанні чергового спробного руху захватного пристрою після відповідного кроку нарощування стискального зусилля призупиняють процес почергового виконання спробних рухів і нарощування стискального зусилля, запам'ятовують і зберігають в пам'яті інтелектуального робота ідентифіковану величину масштабованого стискального зусилля та реєструють кількість спробних рухів, необхідних для ідентифікації бажаного значення величини стискального зусилля, що відповідає масі об'єкта маніпулювання, після чого розводять затискні губки в напрямку збільшення відстані між ними до зникнення контакту між об'єктом маніпулювання і затискними губками захватного пристрою, який потім за допомогою маніпуляційної системи інтелектуального робота опускають у вертикальному напрямі на відстань, що дорівнює добутку кількості здійснених для ідентифікації бажаного стискального зусилля спробних рухів на величину вертикального зміщення захватного пристрою при реалізації одного спробного руху, а в подальшому здійснюють процес кінцевого стискання губок зі створенням бажаної фіксованої величини стискального зусилля, що відповідає попередньо ідентифікованому згідно з масою об'єкта маніпулювання та масштабованому значенню, яке отримують з пам'яті інтелектуального робота, після чого подають команду на переміщення об'єкта маніпулювання згідно з запланованою програмною траєкторією, при цьому попередньо формують базу продукційних правил типу "ЯКЩО (УМОВНІ ОПЕРАТОРИ), ТО (РЕЗУЛЬТАТ)", яка визначає залежність напрямку зміщення об'єкта маніпулювання в захватному пристрої інтелектуального робота від конкретного стану вихідного сигналу кожного сенсорного елемента багатокомпонентної сенсорної системи, в процесі реалізації інтелектуальним роботом запланованої програмної траєкторії неперервно контролюють вихідні сигнали багатокомпонентної сенсорної системи, на основі аналізу яких постійно перевіряють умовні оператори бази продукційних правил типу "ЯКЩО (УМОВНІ ОПЕРАТОРИ), ТО (РЕЗУЛЬТАТ)" та реєструють момент початку зміщення об'єкта маніпулювання в захватному пристрої інтелектуального робота при його зіткненні з перешкодою, на основі аналізу відповідних результатів бази продукційних правил, яку попередньо формують згідно з залежністю напрямку зміщення об'єкта маніпулювання в захватному пристрої інтелектуального робота від конкретного стану вихідного сигналу кожного сенсорного елемента багатокомпонентної сенсорної системи, визначають напрям зміщення об'єкта маніпулювання в пов'язаній з захватним пристроєм системі координат, після чого припиняють реалізацію інтелектуальним роботом запланованої програмної траєкторії, ідентифікують параметри перешкоди, здійснюють корекцію і в подальшому реалізують скориговану траєкторію переміщення об'єкта маніпулювання, що виключає його зіткнення з ідентифікованою перешкодою, який відрізняється тим, що попередньо визначають діапазони зміни вихідного сигналу кожного сенсорного елемента багатокомпонентної сенсорної системи при зміщенні об'єкта маніпулювання в будь-якому напрямку в пов'язаній з захватним пристроєм системі координат, для кожного діапазону формують відповідні лінгвістичні терми, діапазон можливого напрямку зміщення об'єкта маніпулювання при його контакті з перешкодою визначають в межах 360 градусів, для даного діапазону також формують відповідні лінгвістичні терми, кількість і розташування всіх лінгвістичних термів вхідних та вихідного сигналів визначають з врахуванням розбиття Руспіні та вимог щодо точності і швидкодії процесів обробки нечіткої інформації, базу продукційних правил формують у вигляді бази нечітких правил на основі використання відповідних лінгвістичних термів вхідних та вихідного сигналів, безперервний аналіз вихідних сигналів багатокомпонентної сенсорної системи та обробку нечіткої інформації для визначення напрямку зміщення об'єкта маніпулювання здійснюють шляхом використання механізму нечіткого логічного виведення Мамдані типу, для чого послідовно реалізують етапи фазіфікації, агрегації, активації та дефазіфікації інформаційних сигналів, при реалізації механізму нечіткого логічного виведення вихідні сигнали багатокомпонентної сенсорної системи розглядають як вхідні сигнали, а напрям зміщення об'єкта маніпулювання - як вихідний сигнал.
Текст
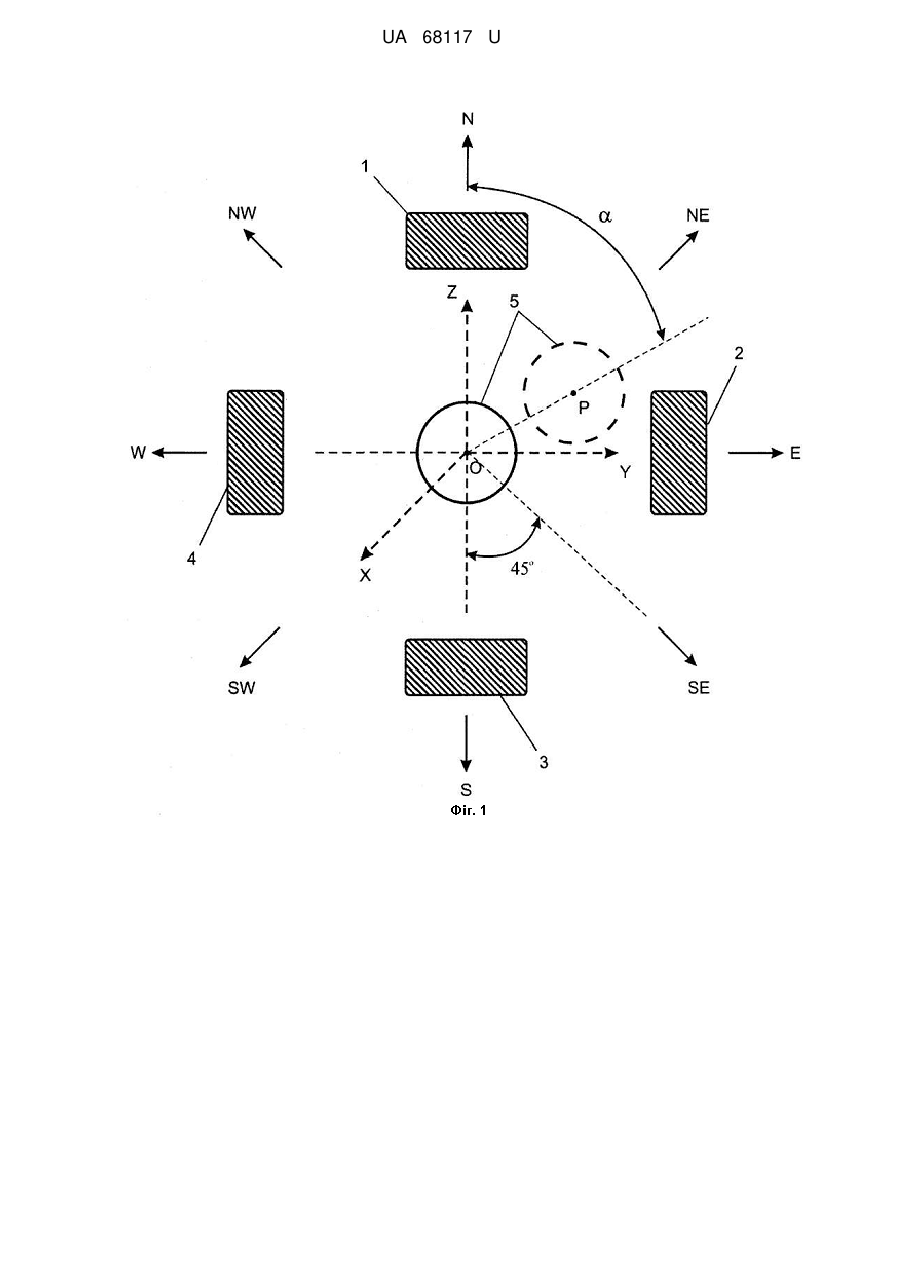
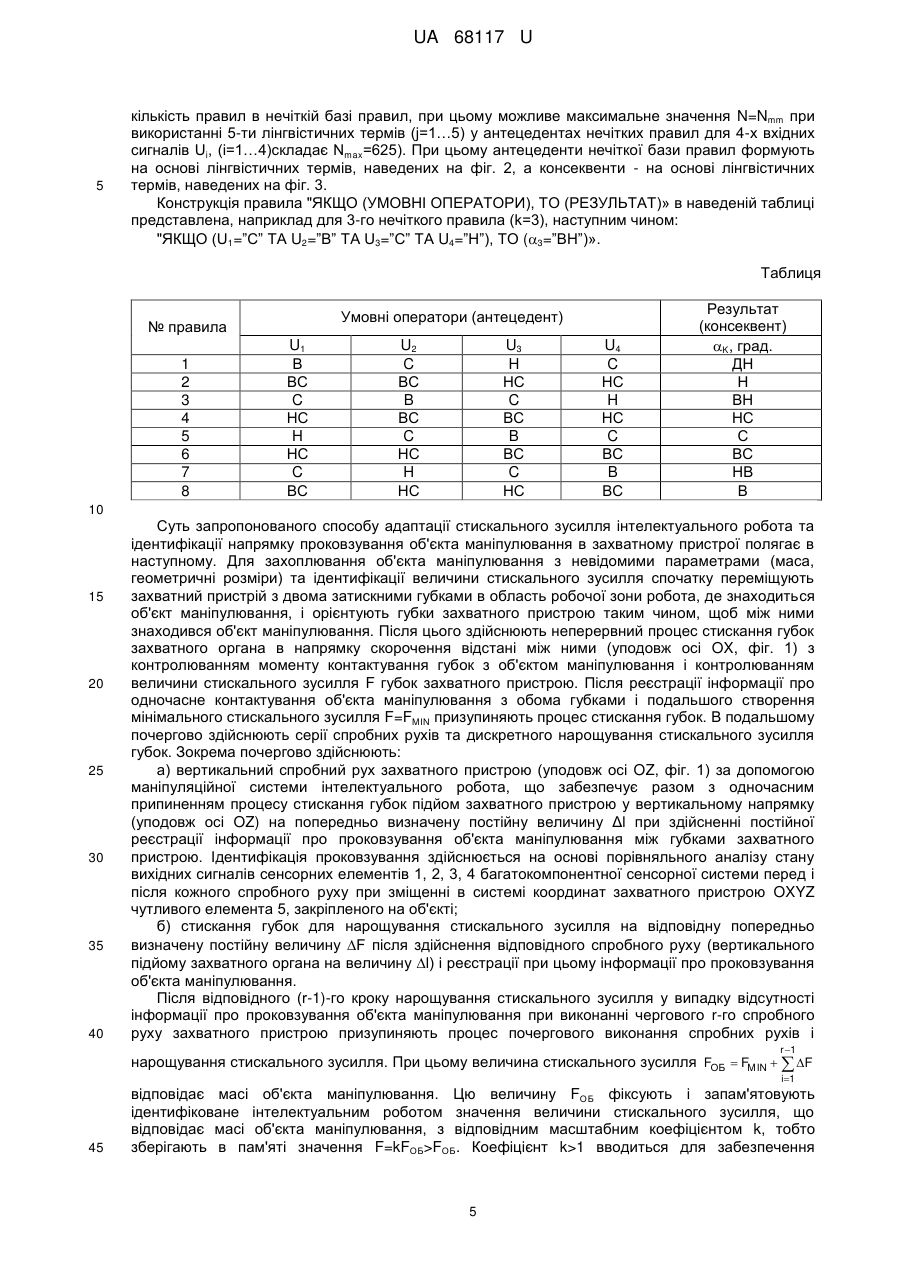
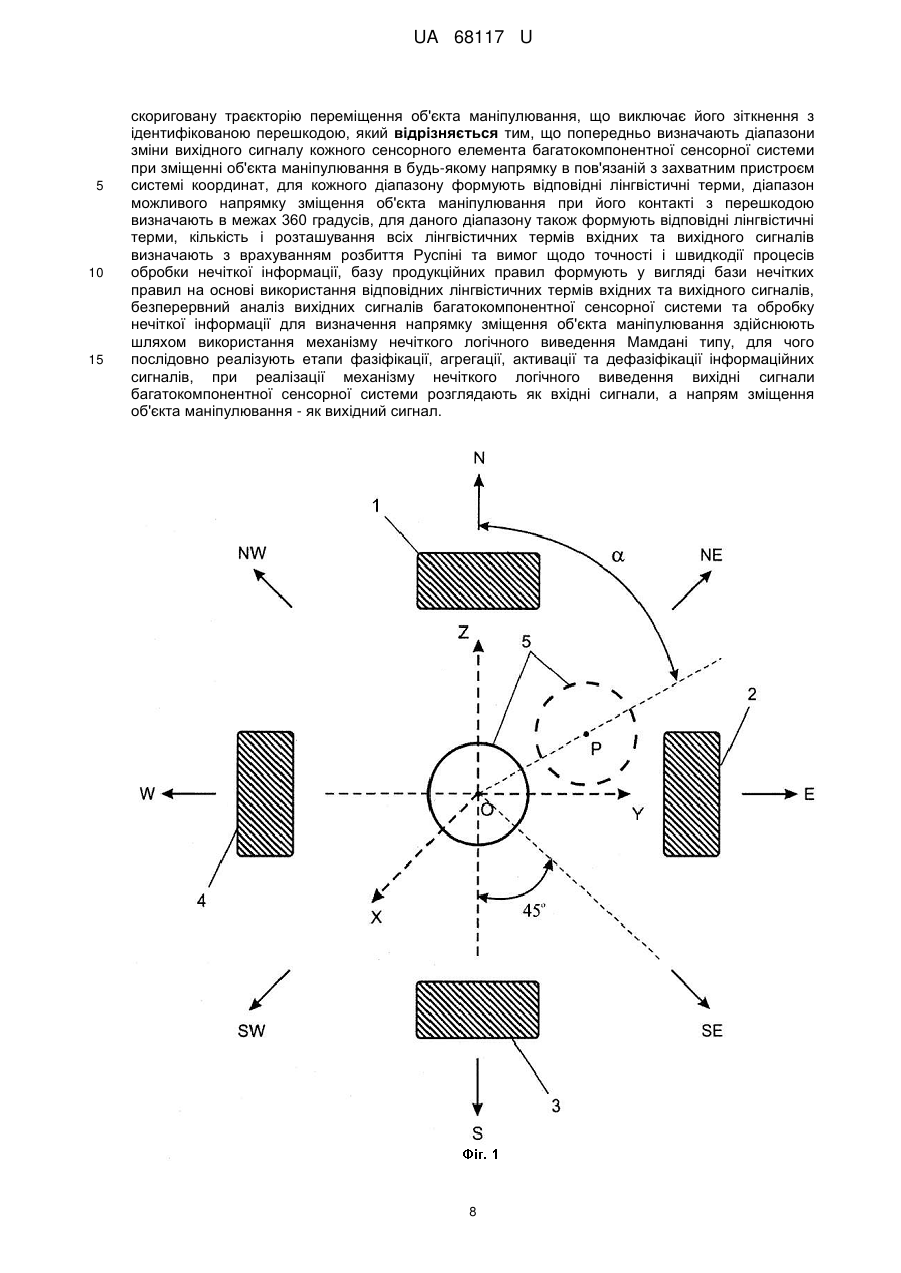
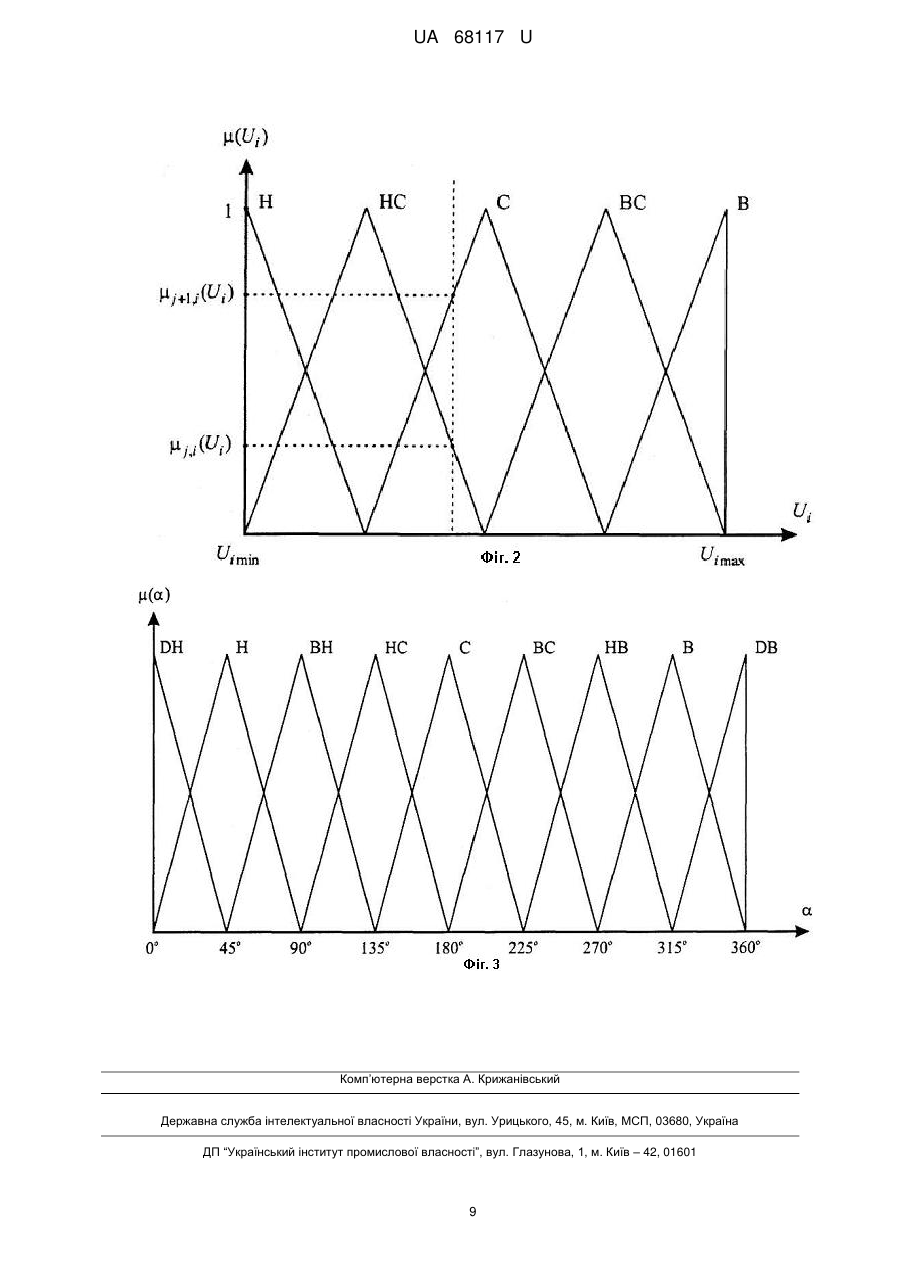
Реферат: Спосіб адаптації стискального зусилля інтелектуального робота та ідентифікації напрямку проковзування об'єкта маніпулювання, згідно з яким для ідентифікації напрямку проковзування об'єкта маніпулювання при зустрічі з перешкодами підвищують точності ідентифікації напрямку зміщення об'єкта в системі координат захватного пристрою інтелектуального робота та відповідну корекцію попередньо запланованої траєкторії за рахунок використання нечіткої бази продукційних правил та механізму нечіткого логічного виведення. UA 68117 U (12) UA 68117 U UA 68117 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до робототехніки й може бути використана в конструкціях та системах управління інтелектуальних роботів з чутливими захватними пристроями, що адаптують величину стискального зусилля до маси об'єкта маніпулювання та забезпечують визначення в автоматичному режимі напрямку зміщення об'єкта в захватному пристрої при його зіткненні з перешкодою в процесі реалізації інтелектуальним роботом запланованих траєкторій. Відомо про способи адаптації інтелектуальних роботів до маси об'єкта маніпулювання, які на основі реєстрації інформації про контактування губок захватного пристрою з об'єктом маніпулювання та реєстрації інформації про проковзування об'єкта між затискними губками захватного пристрою забезпечують одночасний контакт затискних губок з об'єктом і формування величини стискального зусилля відповідно до його маси (в процесі автоматичного захоплювання об'єкта маніпулювання), а також - фіксацію моменту зміщення об'єкта в захватному пристрої при його зіткненні з перешкодою (в процесі реалізації роботами запланованих траєкторій). При цьому реєструють сигнали проковзування, які формують при появі або зникненні проковзування об'єктів маніпулювання в захватних пристроях інтелектуальних роботів. Прикладом такого способу є спосіб адаптації інтелектуального робота до маси об'єктів маніпулювання [Патент України на корисну модель № 41195, МКІ В25J 19/02, G05В 19/00, опубл. Бюл. № 9, 2009], згідно з яким переміщують захватний пристрій з, принаймні, двома затискними губками таким чином, щоб об'єкт маніпулювання знаходився між затискними губками захватного пристрою у центрованому відносно губок положенні. Після цього стискають губки у напрямку скорочення відстані між ними і реєструють інформацію про одночасне контактування обох затискних губок з об'єктом маніпулювання. Потім почергово здійснюють: а) вертикальний спробний рух захватного пристрою за допомогою маніпуляційної системи інтелектуального робота, що забезпечує підйом захватного пристрою у вертикальному напрямку на попередньо визначену постійну величину, з одночасним припиненням процесу стискання губок і з постійною реєстрацією інформації про проковзування об'єкта маніпулювання між губками захватного пристрою; б) стискання губок для нарощування стискального зусилля на відповідну попередньо визначену постійну величину, з одночасним припиненням процесу вертикального підйому захватного пристрою. У випадку відсутності інформації про проковзування об'єкта маніпулювання при виконанні чергового спробного руху захватного пристрою після відповідного попереднього кроку нарощування стискального зусилля призупиняють процес почергового виконання спробних рухів і нарощування стискального зусилля і фіксують з відповідним масштабним коефіцієнтом ідентифіковане інтелектуальним роботом значення величини стискального зусилля, що відповідає масі об'єкта маніпулювання. При цьому запам'ятовують і зберігають в пам'яті інтелектуального робота ідентифіковану величину масштабованого стискального зусилля та реєструють кількість спробних рухів, необхідних для ідентифікації бажаного значення величини стискального зусилля, що відповідає масі об'єкта маніпулювання, після чого розводять затискні губки в напрямку збільшення відстані між ними до зникнення контакту між об'єктом маніпулювання і затискними губками захватного органа, який потім за допомогою маніпуляційної системи інтелектуального робота опускають у вертикальному напрямі на відстань, що дорівнює добутку кількості здійснених для ідентифікації бажаного стискального зусилля спробних рухів на величину вертикального зміщення захватного органу при реалізації одного спробного руху, В подальшому здійснюють процес кінцевого стискання губок зі створенням бажаної фіксованої величини стискального зусилля, що відповідає попередньо ідентифікованому згідно з масою об'єкта маніпулювання та масштабованому значенню, яке отримують з пам'яті інтелектуального робота, і переміщують об'єкт маніпулювання згідно з запланованою програмною траєкторією. Такий спосіб має наступні проблеми: - спосіб забезпечує ідентифікацію зміщення об'єкта в системі координат захватного пристрою тільки в напрямку, що співпадає з напрямком сили тяжіння, зокрема, при збільшенні маси об'єкта в процесі виконання маніпуляційних операцій, у випадку ж появи на запланованій траєкторії переміщення об'єкта перешкоди, при зіткненні з якою може виникнути його зміщення, спосіб не забезпечує ідентифікації напрямку такого зміщення об'єкта маніпулювання в системі координат захватного пристрою; - низька надійність пристроїв, що реалізують даний спосіб, оскільки поява будь-якого проковзування об'єкта маніпулювання в системі координат захватного пристрою буде призводити до нарощування стискального зусилля без призупинення реалізації запланованої траєкторії, а у випадку зіткнення об'єкта з перешкодою таке нарощування стискального зусилля 1 UA 68117 U 5 10 15 20 25 30 35 40 45 50 55 60 (при відповідній реєстрації проковзування об'єкта) й продовження процесу реалізації запланованої траєкторії може стати причиною пошкодження об'єкта маніпулювання або його випадання з губок захватного пристрою. Найбільш близьким до запропонованого є спосіб адаптації стискального зусилля інтелектуального робота та ідентифікації напрямку проковзування об'єкта маніпулюванняв захватному пристрої інтелектуального робота [Патент України на корисну модель № 52069, МКІ В25J 19/02, G05В 19/00, опубл. Бюл. № 15, 2010], що прийнятий як прототип. Згідно даного способу переміщують захватний пристрій з, принаймні, двома затискними губками таким чином, щоб об'єкт маніпулювання знаходився між затискними губками захватного пристрою в центрованому відносно губок положенні, після чого здійснюють стискання губок у напрямку скорочення відстані між ними і реєструють інформацію про одночасне контактування обох затискних губок з об'єктом маніпулювання. Після створення попередньо заданої величини мінімального стискального зусилля призупиняють процес стискання губок, а потім почергово здійснюють: а) вертикальний спробний рух захватного пристрою за допомогою маніпуляційної системи інтелектуального робота, що забезпечує підйом захватного пристрою у вертикальному напрямку на попередньо визначену постійну величину з одночасним припиненням процесу стискання губок і з постійною реєстрацією за допомогою багатокомпонентної сенсорної системи інформації про проковзування об'єкта маніпулювання між губками захватного пристрою; б) стискання губок для нарощування стискального зусилля на відповідну попередньо визначену постійну величину з одночасним припиненням процесу вертикального підйому захватного пристрою. Попередньо формують базу продукційних правил типу "ЯКЩО (УМОВНІ ОПЕРАТОРИ), ТО (РЕЗУЛЬТАТ)», яка визначає залежність напрямку зміщення об'єкта маніпулювання в захватному пристрої інтелектуального робота від конкретного стану вихідного сигналу кожного сенсорного елемента багатокомпонентної сенсорної системи. При цьому базу продукційних правил попередньо формують таким чином, щоб кожному напряму зміщення об'єкта маніпулювання відповідав, принаймні, один з результатів бази продукційних правил. У випадку відсутності інформації про проковзування об'єкта маніпулювання при виконанні чергового спробного руху захватного пристрою після відповідного кроку нарощування стискального зусилля призупиняють процес почергового виконання спробних рухів і нарощування стискального зусилля, запам'ятовують і зберігають в пам'яті інтелектуального робота ідентифіковану величину масштабованого стискального зусилля та реєструють кількість спробних рухів, необхідних для ідентифікації бажаного значення величини стискального зусилля, що відповідає масі об'єкта маніпулювання. Після цього розводять затискні губки в напрямку збільшення відстані між ними до зникнення контакту між об'єктом маніпулювання і затискними губками захватного пристрою, який потім за допомогою маніпуляційної системи інтелектуального робота опускають у вертикальному напрямі на відстань, що дорівнює добутку кількості здійснених для ідентифікації бажаного стискального зусилля спробних рухів на величину вертикального зміщення захватного пристрою при реалізації одного спробного руху. В подальшому здійснюють процес кінцевого стискання губок зі створенням бажаної фіксованої величини стискального зусилля, що відповідає попередньо ідентифікованому згідно з масою об'єкта маніпулювання та масштабованому значенню, яке отримують з пам'яті інтелектуального робота, після чого подають команду на переміщення об'єкта маніпулювання згідно запланованої (програмної) траєкторії. В процесі реалізації інтелектуальним роботом запланованої траєкторії неперервно контролюють вихідні сигнали багатокомпонентної сенсорної системи, на основі аналізу яких постійно перевіряють умовні оператори бази продукційних правил та реєструють момент початку зміщення об'єкта маніпулювання в захватному пристрої інтелектуального робота при його зіткненні з перешкодою. На основі аналізу відповідних результатів бази продукційних правил визначають напрям зміщення об'єкта маніпулювання в пов'язаній з захватним пристроєм системі координат. Після цього припиняють реалізацію інтелектуальним роботом запланованої програмної траєкторії, ідентифікують параметри перешкоди та здійснюють корекцію програмної траєкторії. В подальшому реалізують скориговану траєкторію переміщення об'єкта маніпулювання, що виключає його зіткнення з ідентифікованою перешкодою. Такий спосіб має наступні проблеми: - у випадку появи перешкоди на запланованій траєкторії переміщення об'єкта маніпулювання, при зіткненні з якою може виникнути його зміщення, спосіб забезпечує точну ідентифікацію напрямку такого зміщення об'єкта маніпулювання в системі координат захватного пристрою тільки у 8-ми дискретних напрямках {N, NE, E,SE, S,SW, W,NW}, що, починаючись з 2 UA 68117 U 5 10 15 20 25 30 35 40 45 50 55 60 центру ваги об'єкта маніпулювання, променями розділяють площину, яка є паралельною контактним площинам захватних губок, на вісім секторів, тобто кут між кожною парою сусідніх променів складає 45 градусів; якщо ж напрям зміщення об'єкта маніпулювання в системі координат захватного пристрою точно не співпадає з одним з променів {N, NE, E,SE, S,SW, W,NW}, то має місце похибка у визначенні напрямку проковзування, максимально можливе значення якої складає 22,5 градусів; - низька надійність пристроїв, що реалізують даний спосіб, оскільки неточності у визначенні напрямку проковзування об'єкта маніпулювання в системі координат захватного пристрою можуть призвести до похибок при відповідній ідентифікації координат і параметрів перешкоди, що в свою чергу буде призводити до некоректного перепланування програмної траєкторії з можливістю повторного зіткнення об'єкта маніпулювання з тією ж самою перешкодою. В основу винаходу поставлено задачу удосконалення способу адаптації стискального зусилля інтелектуального робота та ідентифікації напрямку проковзування об'єкта маніпулювання при зустрічі з перешкодами шляхом підвищення точності ідентифікації напрямку зміщення об'єкта в системі координат захватного пристрою інтелектуального робота та відповідної корекції попередньо запланованої траєкторії за рахунок використання нечіткої бази продукційних правил та механізму нечіткого логічного виведення. Поставлена задача вирішується тим, що при реалізації способу адаптації стискального зусилля інтелектуального робота та ідентифікації напрямку проковзування об'єкта маніпулювання в захватному пристрої, згідно з яким переміщують захватний пристрій з, принаймні, двома затискними губками таким чином, щоб об'єкт маніпулювання знаходився між затискними губками захватного пристрою в центрованому відносно губок положенні, після чого здійснюють стискання губок у напрямку скорочення відстані між ними і реєструють інформацію про одночасне контактування обох затискних губок з об'єктом маніпулювання, після створення попередньо заданої величини мінімального стискального зусилля призупиняють процес стискання губок, а потім почергово здійснюють вертикальний спробний рух захватного пристрою за допомогою маніпуляційної системи інтелектуального робота, що забезпечує підйом захватного пристрою у вертикальному напрямку на попередньо визначену постійну величину з одночасним припиненням процесу стискання губок і з постійною реєстрацією за допомогою багатокомпонентної сенсорної системи інформації про проковзування об'єкта маніпулювання між губками захватного пристрою, та стискання губок для нарощування стискального зусилля на відповідну попередньо визначену постійну величину з одночасним припиненням процесу вертикального підйому захватного пристрою, у випадку відсутності інформації про проковзування об'єкта маніпулювання при виконанні чергового спробного руху захватного пристрою після відповідного кроку нарощування стискального зусилля призупиняють процес почергового виконання спробних рухів і нарощування стискального зусилля, запам'ятовують і зберігають в пам'яті інтелектуального робота ідентифіковану величину масштабованого стискального зусилля та реєструють кількість спробних рухів, необхідних для ідентифікації бажаного значення величини стискального зусилля, що відповідає масі об'єкта маніпулювання, після чого розводять затискні губки в напрямку збільшення відстані між ними до зникнення контакту між об'єктом маніпулювання і затискними губками захватного пристрою, який потім за допомогою маніпуляційної системи інтелектуального робота опускають у вертикальному напрямі на відстань, що дорівнює добутку кількості здійснених для ідентифікації бажаного стискального зусилля спробних рухів на величину вертикального зміщення захватного пристрою при реалізації одного спробного руху, а в подальшому здійснюють процес кінцевого стискання губок зі створенням бажаної фіксованої величини стискального зусилля, що відповідає попередньо ідентифікованому згідно з масою об'єкта маніпулювання та масштабованому значенню, яке отримують з пам'яті інтелектуального робота, після чого подають команду на переміщення об'єкта маніпулювання згідно з запланованою програмною траєкторією, при цьому попередньо формують базу продукційних правил типу "ЯКЩО (УМОВНІ ОПЕРАТОРИ), ТО (РЕЗУЛЬТАТ)», яка визначає залежність напрямку зміщення об'єкта маніпулювання в захватному пристрої інтелектуального робота від конкретного стану вихідного сигналу кожного сенсорного елемента багатокомпонентної сенсорної системи, в процесі реалізації інтелектуальним роботом запланованої програмної траєкторії неперервно контролюють вихідні сигнали багатокомпонентної сенсорної системи, на основі аналізу яких постійно перевіряють умовні оператори бази продукційних правил типу "ЯКЩО (УМОВНІ ОПЕРАТОРИ), ТО (РЕЗУЛЬТАТ)» та реєструють момент початку зміщення об'єкта маніпулювання в захватному пристрої інтелектуального робота при його зіткненні з перешкодою, на основі аналізу відповідних результатів бази продукційних правил, яку попередньо формують згідно з залежністю напрямку зміщення об'єкта маніпулювання в 3 UA 68117 U 5 10 15 20 25 30 35 40 45 50 55 60 захватному пристрої інтелектуального робота від конкретного стану вихідного сигналу кожного сенсорного елемента багатокомпонентної сенсорної системи, визначають напрям зміщення об'єкта маніпулювання в пов'язаній з захватним пристроєм системі координат, після чого припиняють реалізацію інтелектуальним роботом запланованої програмної траєкторії, ідентифікують параметри перешкоди, здійснюють корекцію і в подальшому реалізують скориговану траєкторію переміщення об'єкта маніпулювання, що виключає його зіткнення з ідентифікованою перешкодою, згідно до пропозиції попередньо визначають діапазони зміни вихідного сигналу кожного сенсорного елемента багатокомпонентної сенсорної системи при зміщенні об'єкта маніпулювання в будь-якому напрямку в пов'язаній з захватним пристроєм системі координат, для кожного діапазону формують відповідні лінгвістичні терми, діапазон можливого напрямку зміщення об'єкта маніпулювання при його контакті з перешкодою визначають в межах 360 градусів, для даного діапазону також формують відповідні лінгвістичні терми, кількість і розташування всіх лінгвістичних термів вхідних та вихідного сигналів визначають з врахуванням розбиття Руспіні та вимог щодо точності і швидкодії процесів обробки нечіткої інформації, базу продукційних правил формують у вигляді бази нечітких правил на основі використання відповідних лінгвістичних термів вхідних та вихідного сигналів, безперервний аналіз вихідних сигналів багатокомпонентної сенсорної системи та обробку нечіткої інформації для визначення напрямку зміщення об'єкта маніпулювання здійснюють шляхом використання механізму нечіткого логічного виведення Мамдані типу, для чого послідовно реалізують етапи фазіфікації, агрегації, активації та дефазіфікації інформаційних сигналів, при реалізації механізму нечіткого логічного виведення вихідні сигнали багатокомпонентної сенсорної системи розглядають як вхідні сигнали, а напрям зміщення об'єкта маніпулювання - як вихідний сигнал. Винахідницький задум полягає в тому, що спосіб адаптації стискального зусилля інтелектуального робота та ідентифікації напрямку проковзування об'єкта маніпулювання в захватному пристрої забезпечує адаптацію інтелектуального робота до маси об'єктів маніпулювання та підвищення точності ідентифікації будь-якого напрямку зміщення об'єкта маніпулювання в межах 360 градусів в системі координат захватного пристрою при зіткненні об'єкта маніпулювання з перешкодою на шляху реалізації запланованої траєкторії. При цьому суттєво підвищується надійність процесів ідентифікації параметрів перешкоди та корекції попередньо запланованих траєкторій переміщення об'єктів маніпулювання. Фіг. 1 пояснює суть запропонованого способу адаптації стискального зусилля інтелектуального робота та ідентифікації напрямку проковзування об'єкта маніпулювання в захватному пристрої; фіг. 2 ілюструє нечіткі лінгвістичні терми ("Н" - низький, "НС" - нижче середнього, "С" - середній, "ВС" - вище середнього, "В" - високий) для вихідних сигналів багатокомпонентної сенсорної системи Ui, Ui [Ui mіn, Ui.mах], (i=1…4), що одночасно є вхідними сигналами для системи нечіткого логічного виведення; на фіг. 3 показано нечіткі лінгвістичні терми ("ДН" - дуже низький, "Н" - низький, "ВН" - вище низького, "НС" - нижче середнього, "С" середній, "ВС" - вище середнього, "НВ" - нижче високого, "В" - високий, "ДВ" - дуже високий) для напрямку зміщення об'єкта маніпулювання в захватному пристрої інтелектуального робота, що одночасно є вихідним сигналом системи нечіткого логічного виведення. Зокрема, на фіг. 1 показано: робочий простір, в якому можливе зміщення чутливого елемента (разом з об'єктом маніпулювання) в площині OYZ при використанні, наприклад, чотирьохкомпонентної сенсорної системи в системі координат OXYZ захватного пристрою інтелектуального робота, в якій вісь ОХ співпадає з напрямком стискання губок захватного пристрою; сенсорні елементи 1, 2, 3, 4 чотирьохкомпонентної сенсорної системи; початкове положення чутливого елемента 5 співпадає з точкою О (початок координат системи OXYZ), а зміщене положення чутливого елемента 5 - з точкою Р; α - напрям (в градусах) зміщення об'єкта маніпулювання, тобто напрям проковзування при його контактуванні з перешкодою. Лінгвістичні терми (фіг. 2, фіг. 3) мають трикутну форму функцій належності, що традиційно в антецеденті (фіг. 2) мають спряженотрикутний вигляд. При цьому будь-який вхідний сигнал Ui, (i=1…4) одночасно активує тільки дві сусідні функції належності (лінгвістичні терми), сума значень яких згідно розбиттю Руспіні дорівнює одиниці, тобто В таблиці наведено фрагмент (8 правил) бази нечітких продукційних правил типу "ЯКЩО (УМОВНІ ОПЕРАТОРИ), ТО (РЕЗУЛЬТАТ)», яка визначає залежність напрямку зміщення а об'єкта маніпулювання в захватному пристрої інтелектуального робота від конкретного стану вихідного сигналу кожного сенсорного елемента багатокомпонентної сенсорної системи, де U i, (i=1…4) - вихідний сигнал i-го сенсорного елемента багатокомпонентної сенсорної системи, що одночасно є вхідним сигналом для системи нечіткого логічного виведення; αk - вихідний сигнал (консеквент) k-го нечіткого правила системи нечіткого логічного виведення, k=1…N (N - загальна 4 UA 68117 U 5 кількість правил в нечіткій базі правил, при цьому можливе максимальне значення N=Nmm при використанні 5-ти лінгвістичних термів (j=1…5) у антецедентах нечітких правил для 4-х вхідних сигналів Ui, (i=1…4)складає Nmax=625). При цьому антецеденти нечіткої бази правил формують на основі лінгвістичних термів, наведених на фіг. 2, а консеквенти - на основі лінгвістичних термів, наведених на фіг. 3. Конструкція правила "ЯКЩО (УМОВНІ ОПЕРАТОРИ), ТО (РЕЗУЛЬТАТ)» в наведеній таблиці представлена, наприклад для 3-го нечіткого правила (k=3), наступним чином: "ЯКЩО (U1=”С” ТА U2=”В” ТА U3=”С” ТА U4=”Н”), ТО (3=”ВН”)». Таблиця Умовні оператори (антецедент) № правила 1 2 3 4 5 6 7 8 U1 В ВС C НС H НС C ВС U2 C ВС B ВС C НС H НС U3 H НС C ВС B ВС C НС U4 C НС H НС C ВС B ВС Результат (консеквент) K, град. ДН Н ВН НС С ВС НВ В 10 15 20 25 30 35 40 Суть запропонованого способу адаптації стискального зусилля інтелектуального робота та ідентифікації напрямку проковзування об'єкта маніпулювання в захватному пристрої полягає в наступному. Для захоплювання об'єкта маніпулювання з невідомими параметрами (маса, геометричні розміри) та ідентифікації величини стискального зусилля спочатку переміщують захватний пристрій з двома затискними губками в область робочої зони робота, де знаходиться об'єкт маніпулювання, і орієнтують губки захватного пристрою таким чином, щоб між ними знаходився об'єкт маніпулювання. Після цього здійснюють неперервний процес стискання губок захватного органа в напрямку скорочення відстані між ними (уподовж осі OX, фіг. 1) з контролюванням моменту контактування губок з об'єктом маніпулювання і контролюванням величини стискального зусилля F губок захватного пристрою. Після реєстрації інформації про одночасне контактування об'єкта маніпулювання з обома губками і подальшого створення мінімального стискального зусилля F=FMIN призупиняють процес стискання губок. В подальшому почергово здійснюють серії спробних рухів та дискретного нарощування стискального зусилля губок. Зокрема почергово здійснюють: а) вертикальний спробний рух захватного пристрою (уподовж осі OZ, фіг. 1) за допомогою маніпуляційної системи інтелектуального робота, що забезпечує разом з одночасним припиненням процесу стискання губок підйом захватного пристрою у вертикальному напрямку (уподовж осі OZ) на попередньо визначену постійну величину Δl при здійсненні постійної реєстрації інформації про проковзування об'єкта маніпулювання між губками захватного пристрою. Ідентифікація проковзування здійснюється на основі порівняльного аналізу стану вихідних сигналів сенсорних елементів 1, 2, 3, 4 багатокомпонентної сенсорної системи перед і після кожного спробного руху при зміщенні в системі координат захватного пристрою OXYZ чутливого елемента 5, закріпленого на об'єкті; б) стискання губок для нарощування стискального зусилля на відповідну попередньо визначену постійну величину F після здійснення відповідного спробного руху (вертикального підйому захватного органа на величину l) і реєстрації при цьому інформації про проковзування об'єкта маніпулювання. Після відповідного (r-1)-го кроку нарощування стискального зусилля у випадку відсутності інформації про проковзування об'єкта маніпулювання при виконанні чергового r-го спробного руху захватного пристрою призупиняють процес почергового виконання спробних рухів і r 1 нарощування стискального зусилля. При цьому величина стискального зусилля FОБ FMIN F i1 45 відповідає масі об'єкта маніпулювання. Цю величину FOБ фіксують і запам'ятовують ідентифіковане інтелектуальним роботом значення величини стискального зусилля, що відповідає масі об'єкта маніпулювання, з відповідним масштабним коефіцієнтом k, тобто зберігають в пам'яті значення F=kFOБ>FOБ. Коефіцієнт k>1 вводиться для забезпечення 5 UA 68117 U 5 10 15 20 25 30 35 40 45 50 55 60 надійного утримання об'єкта маніпулювання при подальшій реалізації відповідної запланованої програмної траєкторії. При цьому реєструють також кількість спробних рухів r, які були здійснені для ідентифікації бажаного значення величини стискального зусилля FОБ, що відповідає масі об'єкта маніпулювання. В подальшому розводять затискні губки в напрямку збільшення відстані між ними (уподовж осі OX) до зникнення контакту між об'єктом маніпулювання і затискними губками захватного пристрою. Потім за допомогою маніпуляційної системи інтелектуального робота захватний орган з губками 1, 2 опускають у вертикальному напрямі (уподовж осі OZ) на відстань lΣ, що дорівнює добутку кількості здійснених для ідентифікації бажаного стискального зусилля спробних рухів г на величину вертикального зміщення l захватного органа при реалізації одного спробного руху, тобто на величину lΣ=rl. Після цього, коли губки займають (узгоджене з положенням центра ваги об'єкта маніпулювання) положення на осі OX, здійснюють процес кінцевого стискання губок зі створенням бажаної фіксованої величини стискального зусилля, що відповідає попередньо ідентифікованому згідно з масою об'єкта маніпулювання та масштабованому значенню F=kFOБ, яке отримують з пам'яті інтелектуального робота. В подальшому у відповідний момент часу (t0) запам'ятовують значення вихідних сигналів Ui (t0), (i=1…4) багатокомпонентної сенсорної системи і починають реалізацію запланованої траєкторії. При переміщенні об'єкта маніпулювання в динамічному середовищі за попередньо запланованою траєкторією захватний пристрій у відповідний момент часу (t 1) може зіткнутися з перешкодою, яка в робочій зоні інтелектуального робота може виникати випадковим чином. При цьому, якщо величини стискального зусилля F недостатньо для надійної фіксації об'єкта в захватному пристрої при його зіткненні з перешкодою, то виникає зміщення (проковзування) об'єкта в системі координат, пов'язаній з захватним пристроєм. Напрям і величина цього зміщення залежать від параметрів перешкоди (координат її місцерозташування, маси тощо). При зміщенні об'єкта буде змінюватись положення чутливого елемента 5 (фіг. 1) відносно захватного пристрою, а на виходах сенсорних елементів багатокомпонентної сенсорної системи відповідно сформуються нові значення сигналів Ui (t1), (i=1…4). При зміні значень сигналів Ui (t1), (i=1…4) надсилають системі керування роботом команду на призупинення процесу реалізації попередньо запланованої траєкторії і запускають механізм нечіткого логічного виведення Мамдані типу. Шляхом порівняння та аналізу відповідних даних U i (t1), (i=1…4) система нечіткого логічного виведення Мамдані типу при використанні бази нечітких продукційних правил (таблиця) здійснює послідовну обробку нечіткої інформації з реалізацією відповідних етапів фазіфікації, агрегації, активації та дефазіфікації інформаційних сигналів. Вихідні сигнали багатокомпонентної сенсорної системи при реалізації механізму нечіткого логічного виведення відіграють роль вхідних сигналів {Ul, U2,U3,U4} для системи нечіткого логічного виведення Мамдані типу, а її вихідний сигнал α* інтерпретується як ідентифікований напрям зміщення об'єкта маніпулювання в площині OYZ системи координат OXYZ захватного пристрою. На фіг. 1 показано зміщення чутливого елемента 5 (при відповідному зміщенні об'єкта маніпулювання в системі координат захватного пристрою) з точки О в точку Р. При такому (фіг. 1) напрямку (як і при будь-якому іншому напрямку) зміщення об'єкта на виходах сенсорних елементів будуть встановлені сигнали Ui (t1), (i=1…4), а ідентифікований напрям *P буде формуватись шляхом аналізу всіх консеквентів нечіткої бази правил. Процедура обробки нечіткої інформації на основі системи нечіткого логічного виведення Мамдані типу детально описана в науково-технічній літературі, наприклад, в книзі (Леоненков А.В. Нечеткое моделирование в среде MatLab и FuzzyTECH. - СПб.: БХВ-Петербург, 2005.-736 с., ISBN 594157-087-2). На основі інформації про попередньо заплановану траєкторію та напрям проковзування (зміщення) об'єкта визначають координати та орієнтовне місцеположення перешкоди. При цьому фіксують момент контакту з перешкодою (t1), призупиняючи процес реалізації запланованої траєкторії, а в подальшому корегують дану траєкторію, виключаючи можливість повторного зіткнення з ідентифікованою перешкодою, і подають команду на продовження реалізації інтелектуальним роботом скоригованої траєкторії. Позитивний ефект проявляється в тому, що в порівнянні зі способом-прототипом згідно патенту України на корисну модель № 52069, даний спосіб адаптації стискального зусилля інтелектуального робота та ідентифікації напрямку проковзування об'єкта маніпулювання в захватному пристрої забезпечує більш широкий діапазон і більш точне визначення (за допомогою нечіткої бази продукційних правил та механізму нечіткого логічного виведення Мамдані типу) напрямку зміщення об'єкта маніпулювання в системі координат захватного пристрою, що може виникати при випадковій появі в робочій зоні робота перешкоди та при зіткненні об'єкта маніпулювання з цією перешкодою на шляху реалізації запланованої 6 UA 68117 U 5 10 траєкторії. При реалізації статичної бази правил (прототип), в якій кожному ідентифікованому напрямку зміщення об'єкта маніпулювання відповідає конкретне правило, кількість можливих ідентифікованих напрямків зміщення обмежена і залежить від кількості правил. На відміну від статичної бази правил в запропонованому способі, дякуючи апроксимуючим властивостям систем нечіткого логічного виведення, ідентифікація будь-якого напрямку зміщення гарантується при мінімально можливій кількості нечітких правил. При цьому суттєво підвищується надійність процесів реалізації та корекції траєкторій переміщення об'єктів маніпулювання в динамічному середовищі, оскільки запропонований спосіб забезпечує; ідентифікацію будь-якого напрямку зміщення об'єкта маніпулювання в діапазоні 0…360 градусів. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 15 20 25 30 35 40 45 50 55 60 Спосіб адаптації стискального зусилля інтелектуального робота та ідентифікації напрямку проковзування об'єкта маніпулювання, згідно з яким переміщують захватний пристрій з принаймні двома затискними губками таким чином, щоб об'єкт маніпулювання знаходився між затискними губками захватного пристрою в центрованому відносно губок положенні, після чого здійснюють стискання губок у напрямку скорочення відстані між ними і реєструють інформацію про одночасне контактування обох затискних губок з об'єктом маніпулювання, після створення попередньо заданої величини мінімального стискального зусилля призупиняють процес стискання губок, а потім почергово здійснюють вертикальний спробний рух захватного пристрою за допомогою маніпуляційної системи інтелектуального робота, що забезпечує підйом захватного пристрою у вертикальному напрямку на попередньо визначену постійну величину з одночасним припиненням процесу стискання губок і з постійною реєстрацією за допомогою багатокомпонентної сенсорної системи інформації про проковзування об'єкта маніпулювання між губками захватного пристрою, та стискання губок для нарощування стискального зусилля на відповідну попередньо визначену постійну величину з одночасним припиненням процесу вертикального підйому захватного пристрою, у випадку відсутності інформації про проковзування об'єкта маніпулювання при виконанні чергового спробного руху захватного пристрою після відповідного кроку нарощування стискального зусилля призупиняють процес почергового виконання спробних рухів і нарощування стискального зусилля, запам'ятовують і зберігають в пам'яті інтелектуального робота ідентифіковану величину масштабованого стискального зусилля та реєструють кількість спробних рухів, необхідних для ідентифікації бажаного значення величини стискального зусилля, що відповідає масі об'єкта маніпулювання, після чого розводять затискні губки в напрямку збільшення відстані між ними до зникнення контакту між об'єктом маніпулювання і затискними губками захватного пристрою, який потім за допомогою маніпуляційної системи інтелектуального робота опускають у вертикальному напрямі на відстань, що дорівнює добутку кількості здійснених для ідентифікації бажаного стискального зусилля спробних рухів на величину вертикального зміщення захватного пристрою при реалізації одного спробного руху, а в подальшому здійснюють процес кінцевого стискання губок зі створенням бажаної фіксованої величини стискального зусилля, що відповідає попередньо ідентифікованому згідно з масою об'єкта маніпулювання та масштабованому значенню, яке отримують з пам'яті інтелектуального робота, після чого подають команду на переміщення об'єкта маніпулювання згідно з запланованою програмною траєкторією, при цьому попередньо формують базу продукційних правил типу "ЯКЩО (УМОВНІ ОПЕРАТОРИ), ТО (РЕЗУЛЬТАТ)", яка визначає залежність напрямку зміщення об'єкта маніпулювання в захватному пристрої інтелектуального робота від конкретного стану вихідного сигналу кожного сенсорного елемента багатокомпонентної сенсорної системи, в процесі реалізації інтелектуальним роботом запланованої програмної траєкторії неперервно контролюють вихідні сигнали багатокомпонентної сенсорної системи, на основі аналізу яких постійно перевіряють умовні оператори бази продукційних правил типу "ЯКЩО (УМОВНІ ОПЕРАТОРИ), ТО (РЕЗУЛЬТАТ)" та реєструють момент початку зміщення об'єкта маніпулювання в захватному пристрої інтелектуального робота при його зіткненні з перешкодою, на основі аналізу відповідних результатів бази продукційних правил, яку попередньо формують згідно з залежністю напрямку зміщення об'єкта маніпулювання в захватному пристрої інтелектуального робота від конкретного стану вихідного сигналу кожного сенсорного елемента багатокомпонентної сенсорної системи, визначають напрям зміщення об'єкта маніпулювання в пов'язаній з захватним пристроєм системі координат, після чого припиняють реалізацію інтелектуальним роботом запланованої програмної траєкторії, ідентифікують параметри перешкоди, здійснюють корекцію і в подальшому реалізують 7 UA 68117 U 5 10 15 скориговану траєкторію переміщення об'єкта маніпулювання, що виключає його зіткнення з ідентифікованою перешкодою, який відрізняється тим, що попередньо визначають діапазони зміни вихідного сигналу кожного сенсорного елемента багатокомпонентної сенсорної системи при зміщенні об'єкта маніпулювання в будь-якому напрямку в пов'язаній з захватним пристроєм системі координат, для кожного діапазону формують відповідні лінгвістичні терми, діапазон можливого напрямку зміщення об'єкта маніпулювання при його контакті з перешкодою визначають в межах 360 градусів, для даного діапазону також формують відповідні лінгвістичні терми, кількість і розташування всіх лінгвістичних термів вхідних та вихідного сигналів визначають з врахуванням розбиття Руспіні та вимог щодо точності і швидкодії процесів обробки нечіткої інформації, базу продукційних правил формують у вигляді бази нечітких правил на основі використання відповідних лінгвістичних термів вхідних та вихідного сигналів, безперервний аналіз вихідних сигналів багатокомпонентної сенсорної системи та обробку нечіткої інформації для визначення напрямку зміщення об'єкта маніпулювання здійснюють шляхом використання механізму нечіткого логічного виведення Мамдані типу, для чого послідовно реалізують етапи фазіфікації, агрегації, активації та дефазіфікації інформаційних сигналів, при реалізації механізму нечіткого логічного виведення вихідні сигнали багатокомпонентної сенсорної системи розглядають як вхідні сигнали, а напрям зміщення об'єкта маніпулювання - як вихідний сигнал. 8 UA 68117 U Комп’ютерна верстка А. Крижанівський Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 9
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod of adaptation of compressive force of intelligent robot and identification of direction of working object sliding
Автори англійськоюKondratenko Yurii Panteliiovych, Kondratenko Halyna Volodymyrivna, Kondratenko Volodymyr Yuriiovych, Nazarova Iryna Leonidivna
Назва патенту російськоюСпособ адаптации сжимающего усилия интеллектуального робота и идентификации направления скольжения объекта манипулирования
Автори російськоюКондратенко Юрий Пантелеевич, Кондратенко Галина Владимировна, Кондратенко Владимир Юрьевич, Назарова Ирина Леонидовна
МПК / Мітки
МПК: B25J 19/02, G05B 19/00
Мітки: спосіб, об'єкта, інтелектуального, робота, проковзування, зусилля, ідентифікації, маніпулювання, стискального, адаптації, напрямку
Код посилання
<a href="https://ua.patents.su/11-68117-sposib-adaptaci-stiskalnogo-zusillya-intelektualnogo-robota-ta-identifikaci-napryamku-prokovzuvannya-obehkta-manipulyuvannya.html" target="_blank" rel="follow" title="База патентів України">Спосіб адаптації стискального зусилля інтелектуального робота та ідентифікації напрямку проковзування об’єкта маніпулювання</a>
Спосіб ідентифікації стискального зусилля та напрямку зміщення об’єкта в захватному пристрої інтелектуального робота
Номер патенту: 52069
Опубліковано: 10.08.2010
Автори: Кондратенко Юрій Пантелійович, Кондратенко Ніна Юріївна, Кондратенко Володимир Юрійович
МПК: G05B 19/00, B25J 19/02
Мітки: напрямку, стискального, робота, пристрої, зусилля, захватному, зміщення, інтелектуального, ідентифікації, об'єкта, спосіб
Формула / Реферат:
Спосіб адаптації стискального зусилля та ідентифікації напрямку зміщення об'єкта маніпулювання в захватному пристрої інтелектуального робота, згідно з яким переміщують захватний пристрій з принаймні двома затискними губками таким чином, щоб об'єкт маніпулювання знаходився між затискними губками захватного пристрою в центрованому відносно губок положенні, після чого здійснюють стискання губок у напрямку скорочення відстані між ними і...
Спосіб ідентифікації величини стискального зусилля інтелектуального робота
Номер патенту: 41120
Опубліковано: 12.05.2009
Автори: Кондратенко Юрій Пантелійович, Кондратенко Володимир Юрійович, Кондратенко Галина Володимирівна, Аль Суод Махмуд мохаммад Салем
МПК: B25J 19/02, G05B 19/00
Мітки: стискального, ідентифікації, спосіб, величини, зусилля, робота, інтелектуального
Формула / Реферат:
Спосіб ідентифікації величини стискального зусилля інтелектуального робота, згідно з яким переміщують захватний орган з двома затискними губками в область робочої зони робота, де знаходиться об'єкт маніпулювання, і орієнтують губки захватного органа таким чином, щоб між ними знаходився об'єкт маніпулювання, після чого здійснюють стискання губок захватного органа в напрямку скорочення відстані між нимиз контролюванням моментів контактування...
Спосіб адаптації інтелектуального робота до маси об’єктів маніпулювання
Номер патенту: 57158
Опубліковано: 10.02.2011
Автори: Кондратенко Володимир Юрійович, Кондратенко Юрій Пантелійович
МПК: G05B 19/00, B25J 19/02
Мітки: адаптації, об'єктів, маси, маніпулювання, інтелектуального, спосіб, робота
Формула / Реферат:
Спосіб адаптації інтелектуального робота до маси об'єктів маніпулювання, що включає переміщення захватного органа з принаймні двома затискними губками таким чином, щоб об'єкт маніпулювання знаходився між затискними губками захватного органа в центрованому відносно губок положенні, після чого здійснюють стискання губок у напрямку скорочення відстані між ними і реєструють інформацію про одночасне контактування обох затискних губок з об'єктом...
Спосіб адаптації інтелектуального робота до маси об’єктів маніпулювання
Номер патенту: 41195
Опубліковано: 12.05.2009
Автори: Кондратенко Володимир Юрійович, Кондратенко Юрій Пантелійович
МПК: G05B 19/00, B25J 19/02
Мітки: інтелектуального, маси, спосіб, маніпулювання, адаптації, робота, об'єктів
Формула / Реферат:
Спосіб адаптації інтелектуального робота до маси об'єктів маніпулювання, згідно з яким переміщують захватний орган з принаймні двома затискними губками таким чином, щоб об'єкт маніпулювання знаходився між затискними губками захватного органа в центрованому відносно губок положенні, після чого здійснюють стискання губок у напрямку скорочення відстані між ними і реєструють інформацію про одночасне контактування обох затискних губок з об'єктом...
Спосіб безперервної ідентифікації стискального зусилля адаптивного робота
Номер патенту: 63836
Опубліковано: 25.10.2011
Автори: Кондратенко Юрій Пантелійович, Клименко Леонід Павлович
МПК: G05B 19/00, B25J 19/02
Мітки: ідентифікації, зусилля, адаптивного, спосіб, стискального, безперервної, робота
Формула / Реферат:
Спосіб безперервної ідентифікації стискального зусилля адаптивного робота, згідно з яким переміщують захватний орган з, принаймні, двома затискними губками в початкове положення таким чином, щоб об'єкт маніпулювання знаходився між затискними губками захватного органа в центрованому відносно губок положенні, після чого здійснюють стискання губок у напрямку скорочення відстані між ними і реєструють інформацію про одночасне контактування обох...
Попередній патент: Спосіб визначення зносостійкості аустенітних сталей і сплавів
Наступний патент: Спосіб формування аналітичних моделей результуючих нечітких множин при реалізації операцій нечіткої арифметики
Випадковий патент: Кон'югати піролбензодіазепіну для лікування проліферативних захворювань