Спосіб ідентифікації величини стискального зусилля інтелектуального робота
Номер патенту: 41120
Опубліковано: 12.05.2009
Автори: Аль Суод Махмуд мохаммад Салем, Кондратенко Галина Володимирівна, Кондратенко Володимир Юрійович, Кондратенко Юрій Пантелійович

Формула / Реферат
Спосіб ідентифікації величини стискального зусилля інтелектуального робота, згідно з яким переміщують захватний орган з двома затискними губками в область робочої зони робота, де знаходиться об'єкт маніпулювання, і орієнтують губки захватного органа таким чином, щоб між ними знаходився об'єкт маніпулювання, після чого здійснюють стискання губок захватного органа в напрямку скорочення відстані між нимиз контролюванням моментів контактування губок з об'єктом маніпулювання і одночасно переміщують захватний орган в горизонтальній площині почергово у взаємопротилежних напрямках, причому зміну напрямку горизонтального переміщення захватного органа на протилежний здійснюють в момент реєстрації інформації про контактування об'єкта маніпулювання з відповідною губкою захватного органа, в подальшому після реєстрації інформації про одночасне контактування об'єкта маніпулювання з обома губками здійснюють процес підйому захватного органа, а після реєстрації інформації про початок руху об'єкта маніпулювання у вертикальному напрямку припиняють процес стискання губок і фіксують в даний момент величину стискального зусилля, що відповідає масі об'єкта маніпулювання, який відрізняється тим, що в перші два моменти реєстрації інформації про контактування відповідної губки з об'єктом маніпулювання фіксують горизонтальні координати точок контактування, а потім переміщують захватний орган в горизонтальній площині таким чином, щоб його вертикальна вісь співпадала з розрахунковою горизонтальною координатою, яка визначається половиною суми горизонтальних координат обох точок контактування відповідних губок захватного органа з об'єктом маніпулювання.
Текст
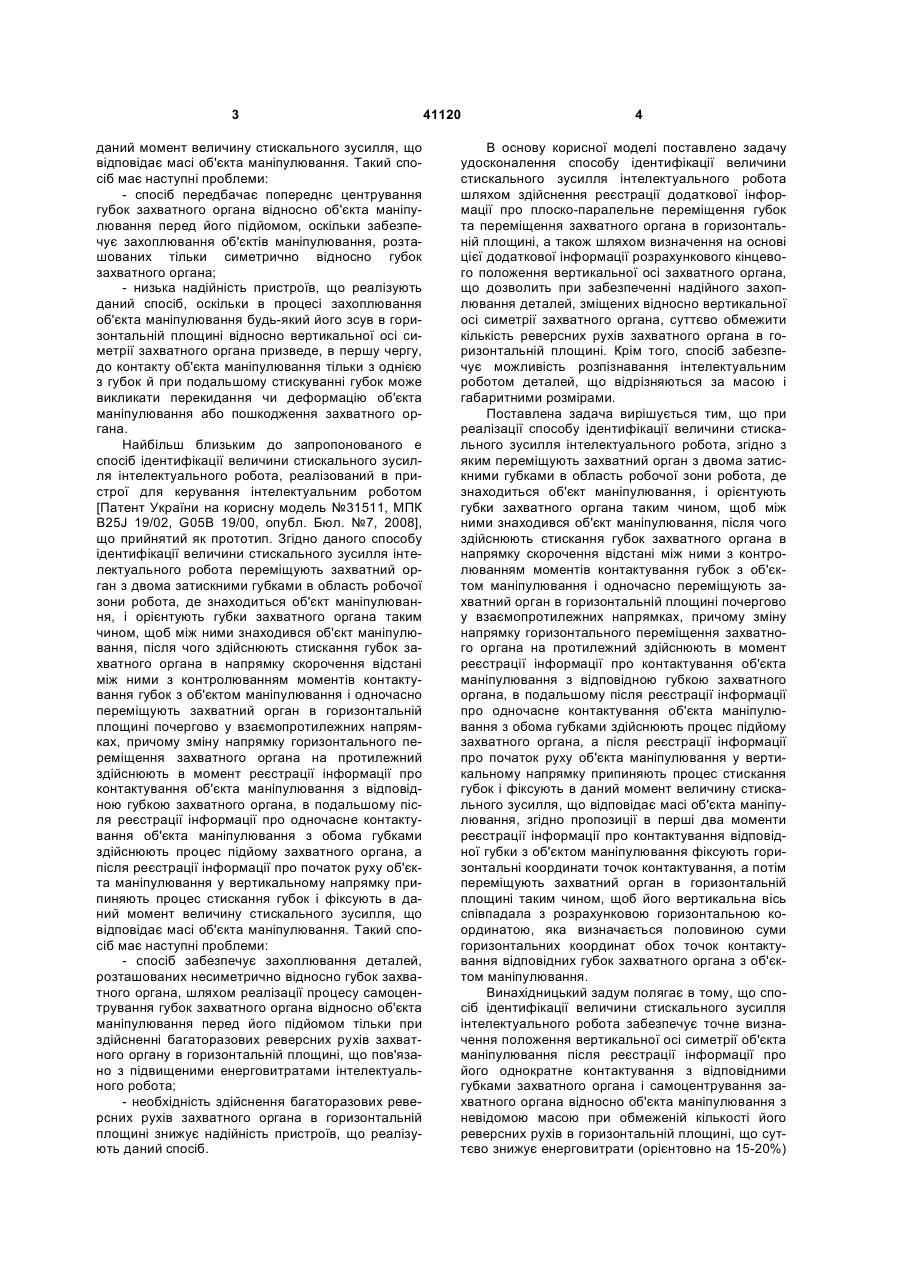
Спосіб ідентифікації величини стискального зусилля інтелектуального робота, згідно з яким переміщують захватний орган з двома затискними губками в область робочої зони робота, де знаходиться об'єкт маніпулювання, і орієнтують губки захватного органа таким чином, щоб між ними знаходився об'єкт маніпулювання, після чого здійснюють стискання губок захватного органа в напрямку скорочення відстані між ними з контролюванням моментів контактування губок з об'єктом маніпулювання і одночасно переміщують захватний орган в горизонтальній площині почергово у U 2 (19) 1 3 даний момент величину стискального зусилля, що відповідає масі об'єкта маніпулювання. Такий спосіб має наступні проблеми: - спосіб передбачає попереднє центрування губок захватного органа відносно об'єкта маніпулювання перед його підйомом, оскільки забезпечує захоплювання об'єктів маніпулювання, розташованих тільки симетрично відносно губок захватного органа; - низька надійність пристроїв, що реалізують даний спосіб, оскільки в процесі захоплювання об'єкта маніпулювання будь-який його зсув в горизонтальній площині відносно вертикальної осі симетрії захватного органа призведе, в першу чергу, до контакту об'єкта маніпулювання тільки з однією з губок й при подальшому стискуванні губок може викликати перекидання чи деформацію об'єкта маніпулювання або пошкодження захватного органа. Найбільш близьким до запропонованого е спосіб ідентифікації величини стискального зусилля інтелектуального робота, реалізований в пристрої для керування інтелектуальним роботом [Патент України на корисну модель №31511, МПК B25J 19/02, G05B 19/00, опубл. Бюл. №7, 2008], що прийнятий як прототип. Згідно даного способу ідентифікації величини стискального зусилля інтелектуального робота переміщують захватний орган з двома затискними губками в область робочої зони робота, де знаходиться об'єкт маніпулювання, і орієнтують губки захватного органа таким чином, щоб між ними знаходився об'єкт маніпулювання, після чого здійснюють стискання губок захватного органа в напрямку скорочення відстані між ними з контролюванням моментів контактування губок з об'єктом маніпулювання і одночасно переміщують захватний орган в горизонтальній площині почергово у взаємопротилежних напрямках, причому зміну напрямку горизонтального переміщення захватного органа на протилежний здійснюють в момент реєстрації інформації про контактування об'єкта маніпулювання з відповідною губкою захватного органа, в подальшому після реєстрації інформації про одночасне контактування об'єкта маніпулювання з обома губками здійснюють процес підйому захватного органа, а після реєстрації інформації про початок руху об'єкта маніпулювання у вертикальному напрямку припиняють процес стискання губок і фіксують в даний момент величину стискального зусилля, що відповідає масі об'єкта маніпулювання. Такий спосіб має наступні проблеми: - спосіб забезпечує захоплювання деталей, розташованих несиметрично відносно губок захватного органа, шляхом реалізації процесу самоцентрування губок захватного органа відносно об'єкта маніпулювання перед його підйомом тільки при здійсненні багаторазових реверсних рухів захватного органу в горизонтальній площині, що пов'язано з підвищеними енерговитратами інтелектуального робота; - необхідність здійснення багаторазових реверсних рухів захватного органа в горизонтальній площині знижує надійність пристроїв, що реалізують даний спосіб. 41120 4 В основу корисної моделі поставлено задачу удосконалення способу ідентифікації величини стискального зусилля інтелектуального робота шляхом здійснення реєстрації додаткової інформації про плоско-паралельне переміщення губок та переміщення захватного органа в горизонтальній площині, а також шляхом визначення на основі цієї додаткової інформації розрахункового кінцевого положення вертикальної осі захватного органа, що дозволить при забезпеченні надійного захоплювання деталей, зміщених відносно вертикальної осі симетрії захватного органа, суттєво обмежити кількість реверсних рухів захватного органа в горизонтальній площині. Крім того, спосіб забезпечує можливість розпізнавання інтелектуальним роботом деталей, що відрізняються за масою і габаритними розмірами. Поставлена задача вирішується тим, що при реалізації способу ідентифікації величини стискального зусилля інтелектуального робота, згідно з яким переміщують захватний орган з двома затискними губками в область робочої зони робота, де знаходиться об'єкт маніпулювання, і орієнтують губки захватного органа таким чином, щоб між ними знаходився об'єкт маніпулювання, після чого здійснюють стискання губок захватного органа в напрямку скорочення відстані між ними з контролюванням моментів контактування губок з об'єктом маніпулювання і одночасно переміщують захватний орган в горизонтальній площині почергово у взаємопротилежних напрямках, причому зміну напрямку горизонтального переміщення захватного органа на протилежний здійснюють в момент реєстрації інформації про контактування об'єкта маніпулювання з відповідною губкою захватного органа, в подальшому після реєстрації інформації про одночасне контактування об'єкта маніпулювання з обома губками здійснюють процес підйому захватного органа, а після реєстрації інформації про початок руху об'єкта маніпулювання у вертикальному напрямку припиняють процес стискання губок і фіксують в даний момент величину стискального зусилля, що відповідає масі об'єкта маніпулювання, згідно пропозиції в перші два моменти реєстрації інформації про контактування відповідної губки з об'єктом маніпулювання фіксують горизонтальні координати точок контактування, а потім переміщують захватний орган в горизонтальній площині таким чином, щоб його вертикальна вісь співпадала з розрахунковою горизонтальною координатою, яка визначається половиною суми горизонтальних координат обох точок контактування відповідних губок захватного органа з об'єктом маніпулювання. Винахідницький задум полягає в тому, що спосіб ідентифікації величини стискального зусилля інтелектуального робота забезпечує точне визначення положення вертикальної осі симетрії об'єкта маніпулювання після реєстрації інформації про його однократне контактування з відповідними губками захватного органа і самоцентрування захватного органа відносно об'єкта маніпулювання з невідомою масою при обмеженій кількості його реверсних рухів в горизонтальній площині, що суттєво знижує енерговитрати (орієнтовно на 15-20%) 5 і підвищує надійність процесу захоплювання об'єкта маніпулювання. Таким чином, при реалізації способу в процесі захоплювання об'єктів маніпулювання, які зміщені в горизонтальній площині відносно вертикальної осі захватного органа, забезпечується можливість формування координат вертикальної осі симетрії об'єкта маніпулювання і відповідного кінцевого положення захватного органа, куди його переміщують без додаткових реверсних рухів, і одночасне розпізнавання інтелектуальним роботом об'єктів маніпулювання, що відрізняються за масою і габаритними розмірами. Фігури 1-4 пояснюють суть запропонованого способу ідентифікації величини стискального зусилля інтелектуального робота, зокрема на Фіг.1 показано положення губок 1, 2 захватного органа та об'єкта маніпулювання 3, що зміщений в горизонтальній площині (по осі ОХ) відносно вертикальної осі OY захватного органа, перед початком процесу захоплювання інтелектуальним роботом об'єкта маніпулювання; на Фіг.2 - момент контактування правої губки 1 захватного органа з об'єктом маніпулювання 3; на Фіг.3 - момент контактування лівої губки 1 захватного органа з об'єктом маніпулювання 3; на Фіг.4 - розрахункове положення вертикальної осі симетрії G'H' об'єкта маніпулювання 3 і кінцеве положення захватного органа по відношенню до об'єкта маніпулювання 3 при поточному положенні затискних губок захватного органа. Суть запропонованого способу ідентифікації величини стискального зусилля інтелектуального робота полягає в наступному. Для захоплювання об'єкта маніпулювання з невідомими параметрами (маса, геометричні розміри) та ідентифікації величини стискального зусилля спочатку переміщують захватний орган з двома затискними губками в область робочої зони робота, де знаходиться об'єкт маніпулювання, і орієнтують губки 1, 2 захватного органа таким чином, щоб між ними знаходився об'єкт маніпулювання 3 (Фіг.1). Точка A0 (Фіг.1) відповідає при цьому початковому положенню центра захватного органа на вертикальній осі OY, відносно якої в подальшому буде здійснюватись реєстрація інформації про переміщення захватного органа в горизонтальній площині уподовж осі ОХ. Після цього здійснюють неперервний процес стискання губок захватного органа в напрямку скорочення відстані між ними (l0 - початкова відстань між губками 1 та 2) з постійним контролюванням моментів контактування губок 1, 2 з об'єктом маніпулювання 3 і одночасно переміщують захватний орган в горизонтальній площині (уподовж осі ох) до моменту реєстрації інформації про контактування відповідної губки (наприклад правої губки 1, Фіг.2) з об'єктом маніпулювання 3. При цьому кожна губка в процесі їх стискання наближається до іншої на відстань (l0-l1)/2, де l1 - відстань між губками 1, 2 в момент контактування правої губки 1 з об'єктом маніпулювання 3 (Фіг.2). В момент реєстрації інформації про контактування правої губки 1 з об'єктом маніпулювання 3, коли центр захватного органа знаходиться в точці 4 (Фіг.2), фіксують горизонтальну координату ХП точки контактування і змінюють напрям горизонта 41120 6 льного переміщення захватного органа на протилежний. При цьому переміщення захватного органа здійснюють до моменту реєстрації інформації про контактування лівої губки 2 (Фіг.3) з об'єктом маніпулювання 3, коли центр захватного органа знаходиться в точці А2 (Фіг.3), а кожна губка по відношенню до іншої переміщується на відстань (l0-l2)/2, де l2 - відстань між губками 1, 2 в момент контактування лівої губки 1 з об'єктом маніпулювання 3 (Фіг.3). В момент реєстрації інформації про контактування лівої губки 2 з об'єктом маніпулювання 3 (Фіг.3) фіксують горизонтальну координату ХЛ точки контактування і змінюють напрям горизонтального переміщення захватного органа на протилежний. При цьому переміщення захватного органа в горизонтальній площині здійснюють таким чином, щоб його вертикальна вісь G'H', на якій знаходиться центр захватного органа А3 (Фіг.4), співпадала з розрахунковою горизонтальною координатою х*, яка визначається половиною суми горизонтальних координат xП,xЛ обох точок контактування відповідних губок 1, 2 захватного органа з об'єктом маніпулювання 3, зокрема, d x + xЛ x - xЛ . x* = x П - П = xП - 0 = П 2 2 2 Розрахункове значення d0 довжини об'єкта маніпулювання 3 уподовж осі ОХ визначається при цьому як d0=xП-xЛ і може бути використане для розпізнавання об'єктів маніпулювання 3 за їх габаритними розмірами. В момент бажаного розміщення центра захватного органа А3 на осі G'H' губки 1, 2 наближають одну до одної в процесі їх стискання на відстань (l0-l3)/2 (Фіг.4). В подальшому захватний орган залишають у фіксованому положенні (згідно положення вісі G'H' об'єкта маніпулювання 3) і тільки продовжують процес стискання губок 1, 2 до наближення кожної з них по відношенню до іншої на відстань (l0-l0)/2. Після реєстрації інформації про одночасне контактування об'єкта маніпулювання 3 з обома губками 1, 2 починають здійснювати процес підйому захватного органа з одночасним продовженням процесу стискання губок 1, 2, а після реєстрації інформації про початок руху об'єкта маніпулювання 3 у вертикальному напрямку припиняють процес стискання губок 1, 2 і фіксують в даний момент величину стискального зусилля, що відповідає масі об'єкта маніпулювання 3. Позитивний ефект проявляється в тому, що в порівнянні зі способом-прототипом, реалізованим згідно патенту України на корисну модель № 31511, даний спосіб ідентифікації величини стискального зусилля інтелектуального робота дозволяє підвищити надійність процесу захоплювання об'єктів маніпулювання при їх початковому зсуві в горизонтальній площині відносно вертикальної осі симетрії захватного органа без здійснення додаткових багаторазових реверсних рухів захватного органа в горизонтальній площині, що в свою чергу приблизно на 15-20% знижує енерговитрати інтелектуального робота. Саме можливість ідентифікації величини стискального зусилля без здійснення додаткових реверсних рухів захватного органа і складає основний винахідницький задум і створює широкі перспективи по впровадженню запропоно 7 41120 ваного способу. Разом з тим, спосіб дає можливість не тільки ідентифікувати величину стискального зусилля, що відповідає масі об'єктів маніпулювання, а й визначати їх габаритні розміри, що Комп’ютерна верстка Л. Купенко 8 підвищує надійність подальшого розпізнавання об'єктів маніпулювання системою управління інтелектуального робота. Підписне Тираж 28 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod of identification of value of compressive force of intelligent robot
Автори англійськоюKondratenko Yurii Panteliiovych, Kondratenko Volodymyr Yuriiovych, Al Suod Makhmud Mokhammad Salem, Kondratenko Halyna Volodymyrivna
Назва патенту російськоюСпособ идентификации величины сжимающего усилия интеллектуального робота
Автори російськоюКондратенко Юрий Пантелеевич, Кондратенко Владимир Юрьевич, Аль Суод Махмуд Мохаммад Салем, Кондратенко Галина Владимировна
МПК / Мітки
МПК: G05B 19/00, B25J 19/02
Мітки: спосіб, ідентифікації, робота, стискального, інтелектуального, зусилля, величини
Код посилання
<a href="https://ua.patents.su/4-41120-sposib-identifikaci-velichini-stiskalnogo-zusillya-intelektualnogo-robota.html" target="_blank" rel="follow" title="База патентів України">Спосіб ідентифікації величини стискального зусилля інтелектуального робота</a>
Адаптивний захватний пристрій інтелектуального робота

Номер патенту: 14569
Опубліковано: 15.05.2006
Автори: Кондратенко Юрій Пантелійович, Швець Едуард Анатолійович
МПК: B25J 15/00
Мітки: адаптивний, пристрій, робота, інтелектуального, захватний
Формула / Реферат:
Адаптивний захватний пристрій інтелектуального робота, що містить кінематично зв'язані з приводом губки, принаймні на одній з яких встановлено перший і другий датчики стискального зусилля, зв'язані з блоком керування приводом губок, інтерфейс якого містить чотири входи і чотири виходи, у губках виконані напрямні пази, у яких з можливістю переміщення встановлені пружно зв'язані з відповідною губкою рухливі елементи, які мають можливість...
Адаптивний захватний пристрій інтелектуального робота
Номер патенту: 26252
Опубліковано: 10.09.2007
Автори: Шишкін Олександр Сергійович, Швець Едуард Анатолійович, Кондратенко Юрій Пантелійович, Чернов Сергій Костянтинович, Кондратенко Володимир Юрійович, Марковський Ігор Володимирович
МПК: B25J 15/00
Мітки: інтелектуального, адаптивний, робота, захватний, пристрій
Формула / Реферат:
Адаптивний захватний пристрій інтелектуального робота, що містить кінематично зв'язані з приводом губки, принаймні на одній з яких встановлено перший і другий датчики стискального зусилля, зв'язані з блоком керування приводом губок, у губках з можливістю плоскопаралельного та обертового переміщення встановлені пружно зв'язані з відповідною губкою рухливі елементи, які мають можливість взаємодії з першим датчиком стискального зусилля і другим...
Пристрій ідентифікації та аналізу тактильних сигналів для інформаційно-керуючої системи адаптивного робота

Номер патенту: 40710
Опубліковано: 27.04.2009
Автори: Запорожець Юрій Михайлович, Кондратенко Галина Володимирівна, Шишкін Олександр Сергійович, Кондратенко Юрій Пантелійович
МПК: B25J 19/02
Мітки: робота, інформаційно-керуючої, пристрій, тактильних, системі, сигналів, адаптивного, аналізу, ідентифікації
Формула / Реферат:
Пристрій ідентифікації та аналізу тактильних сигналів для комп'ютерної інформаційно-керуючої системи адаптивного робота з одним входом та трьома виходами, що має у своєму складі послідовно з'єднані перший датчик проковзування деталі й перший підсилювач, тактильний датчик, встановлений на одній з губок захвата робота, перший блок затримки, привід губок захвата, перший елемент АБО, послідовно з'єднані перший RS-тригер, інтегратор, перший...
Датчик проковзування об’єкта маніпулювання адаптивного робота
Номер патенту: 36077
Опубліковано: 10.10.2008
Автори: Кондратенко Юрій Пантелійович, Кондратенко Галина Володимирівна, Марковський Ігор Володимирович, Чернов Сергій Костянтинович, Кондратенко Володимир Юрійович
МПК: B25J 19/02
Мітки: датчик, проковзування, об'єкта, робота, адаптивного, маніпулювання
Формула / Реферат:
Датчик проковзування об'єкта маніпулювання адаптивного робота, що містить корпус, в якому розміщено магнітну систему, до складу якої входить циліндричний ролик, виконаний у вигляді принаймні одного замкнутого тороїдального намагніченого магнітопроводу з нанесеним на твірну поверхню ролика захисним пружним покриттям і з можливістю обертання ролика навколо своєї осі, та закріплений на корпусі магніточутливий елемент, до складу якого входять...
Двозахватний пристрій промислового робота

Номер патенту: 15774
Опубліковано: 17.07.2006
Автори: Павленко Іван Іванович, Мажара Віталій Анатолійович
МПК: F16S 5/00
Мітки: пристрій, промислового, робота, двозахватний
Формула / Реферат:
1. Двозахватний пристрій промислового робота для одночасного затиску двох деталей, що складається з важелів з губками, вилки та тяги, які приєднані до кронштейна, обертового пневмоциліндра та пневмоциліндра розтиску, який відрізняється тим, що пневмоциліндр розтиску винесений за межі захватного пристрою.2. Двозахватний пристрій промислового робота за п. 1, який відрізняється тим, що розтиск захвату можливий лише в робочій...
Попередній патент: Спосіб виготовлення інтегрального мікроелектронного твердотільного оптичного пристрою
Наступний патент: Пристрій для керування інтелектуальним роботом
Випадковий патент: Спосіб активного заглушення шуму для гіпсокартонних конструкцій