Маніпулятор для внутрішнього контролю циліндричних резервуарів
Формула / Реферат
1. Манипулятор для внутреннего контроля цилиндрических резервуаров, содержащий трубообразную мачту с расположенными на ее нижнем конце пятой и на ее верхнем конце центровочным подшипниковым узлом, выполненный с возможностью перемещения вдоль мачты и охватывающий мачту суппорт для установки на нем контрольного, измерительного или смотрового устройства и связанный с центровочным подшипниковым узлом узел привода поднятия и опускания суппорта, отличающийся тем, что, с целью обеспечения ультразвуковой дефектоскопии кольцевых швов на вертикально расположенном баллонообразном коллекторе горизонтально расположенного парогенератора и дефектоскопии с помощью, вихревых токов горизонтально проходящих, радиально входящих в коллектор теплообменных труб (игольчатые трубы), он снабжен охватывающим мачту коробообразным корпусом, высота которого больше высоты суппорта, а нижняя часть предназначена для установки на фланец контролируемого резервуара соосно с ним, закрепленным на корпусе приводным двигателем с шестерней, закрепленной на мачте, направляющей для суппорта, выполненной в виде параллельной оси мачты скользящей пяты линейной системы каретки, приводным шпинделем, установленным параллельно мачте в центрирующем подшипниковом узле пяты и кинематически связанным с узлом привода поднятия и опускания суппорта, и закрепленной параллельно мачте зубчатой рейкой, пята выполнена в виде центрирующей звезды, а мачта установлена в ней с возможностью вращения вокруг своей оси, центровочный подшипниковый узел выполнен в виде установленной на мачте несущей звезды с зубчатым венцом, взаимодействующим с шестерней приводного двигателя, кольцеобразной системы каретки, установленной на верхнем краю корпуса на цапфовых опорах, скользящее кольцо которой кинематически связано с несущей звездой, суппорт выполнен с коробчатообразной, открытой сверху и снизу рамой, охватывающей мачту, приводной шпиндель и зубчатую рейку и установленной с возможностью перемещения вдоль мачты, и с установленной на раме с возможностью вращения вокруг оси, параллельной мачте, приводной головкой, взаимодействующей с приводным шпинделем и зубчатой рейкой, на внутренней стороне одной из стенок рамы установлены цапфовые опоры, взаимодействующие со скользящей плитой, на противоположной стенке рамы закреплен держатель средств вихретокового контроля, а на двух других стенках рамы закреплены держатели средств ультразвукового контроля.
2. Манипулятор по п. 1, отличающийся тем, что коробообразный корпус содержит верхнее и нижнее несущие кольца и несколько колонн, связывающих оба несущих кольца, а каждая колонна состоит из двух телескопически сцепляемых труб.
3. Манипулятор по п. 2, отличающийся тем, что внутренняя труба каждой колонны выполнена с гайкой, с которой входит в зацепление шпилька, установленная с возможностью вращения в противолежащем несущем кольце.
4. Манипулятор по п. 1, отличающийся тем, что приводной шпиндель имеет шестигранный профиль, а приводная головка взаимодействует с приводным шпинделем посредством направляющих роликов, имеющих и-образно прорезанные канавки.
5. Манипулятор по п. 4, отличающийся тем, что приводная головка выполнена с охватывающим приводной шпиндель червяком, который через червячное колесо и связанное с ним зубчатое колесо находится в зацеплении с зубчатой рейкой.
6. Манипулятор по п. 1, отличающийся тем, что центрирующая звезда выполнена в виде фермы с двумя установленными радиально к мачте регулируемыми упорами, шарнирно закрепленного на ферме бананообразного согнутого рычага, установленного симметрично обоим упорам с возможностью перемещения радиально мачте, и подъемного привода, шток которого шарнирно соединен со свободным концом рычага, а корпус шарнирно соединен с фермой.
7. Манипулятор по п. 6, отличающийся тем, что центрирующая звезда аксиально установлена на нижнем конце мачты.
8. Манипулятор по п. 1, отличающийся тем, что средство ультразвукового контроля выполнено с основной пятой, предназначенной для закрепления на соответствующей стенке коробчатообразной рамы суппорта.
9. Манипулятор по п. 8, отличающийся тем, что держатель средства контроля содержит рычажный прямолинейно направляющий механизм с первым приводным коромыслом Еванса, кривошип которого установлен на основной плите, расположенную на основной плите скользящую пяту, на которой закреплен рычаг приводного коромысла Еванса, второе приводное коромысло Еванса, кривошип которого соединен с головкой средства контроля, а рычаг второго коромысла Еванса связан с ведомым концом рычага первого коромысла Еванса посредством подъемного привода.
10. Манипулятор по п. 1, отличающийся тем, что средство вихретокового контроля выполнено с основной плитой, предназначенной для закрепления на соответствующую стенку коробчатообразной рамы суппорта.
11. Манипулятор по п. 10, отличающийся тем, что он снабжен установленными на основной плите барабаном скользящего шланга зонда вихревых токов, подающим колесом, ось которого параллельна оси барабана, несколькими прижимными колесами, установленными на основной плите по окружности подающего колеса, установленным тангенциально к подающему колесу горизонтальным корпусом для приема зонда вихревых токов и установленной в корпусе с возможностью поворота вокруг вертикальной оси трубы, являющейся направляющей зонда, и приводом барабана приводного колеса, выполненным в виде приводного двигателя и передачи, имеющей два вращающихся в одном направлении приводных вала, и расположенным на обратной стороне основной плиты сбоку от суппорта.
Текст
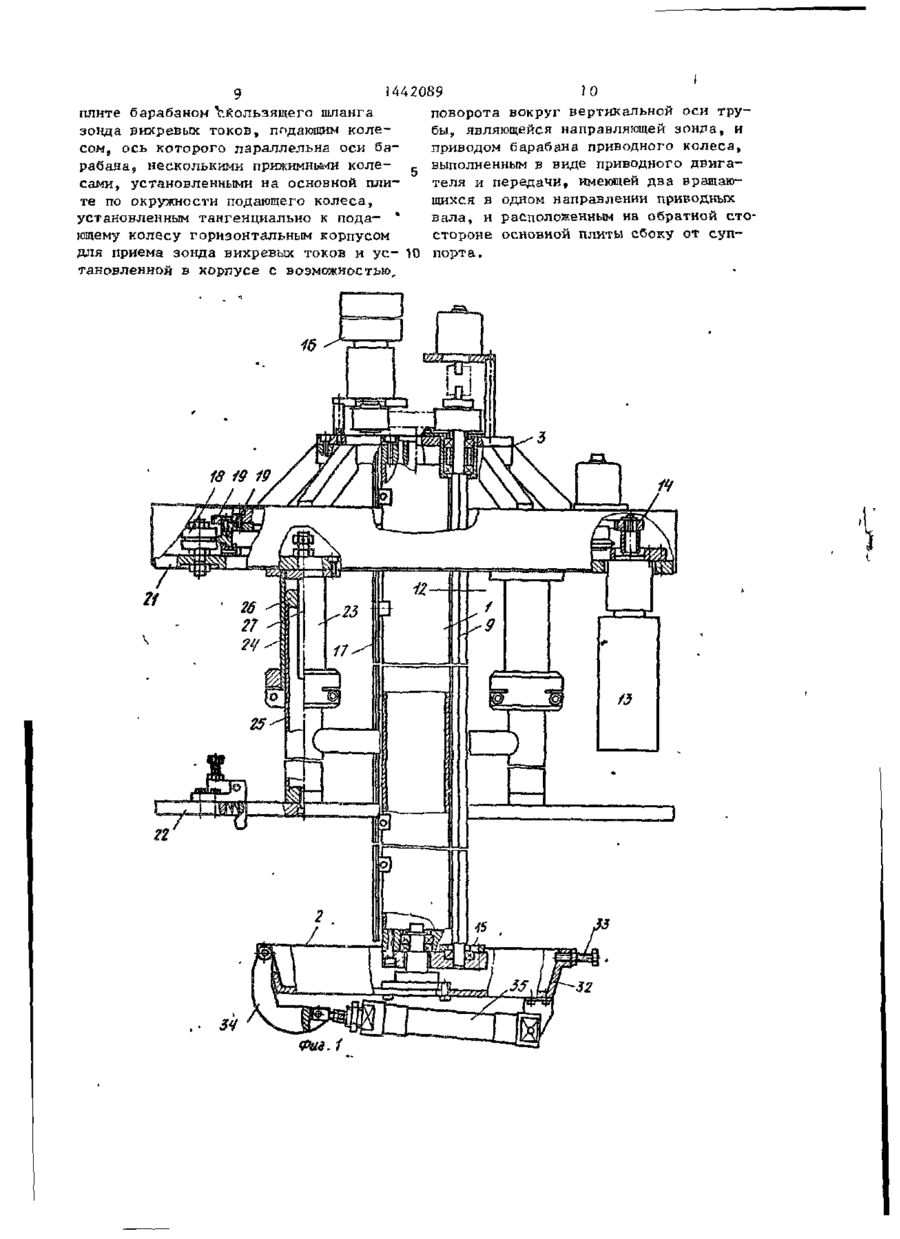
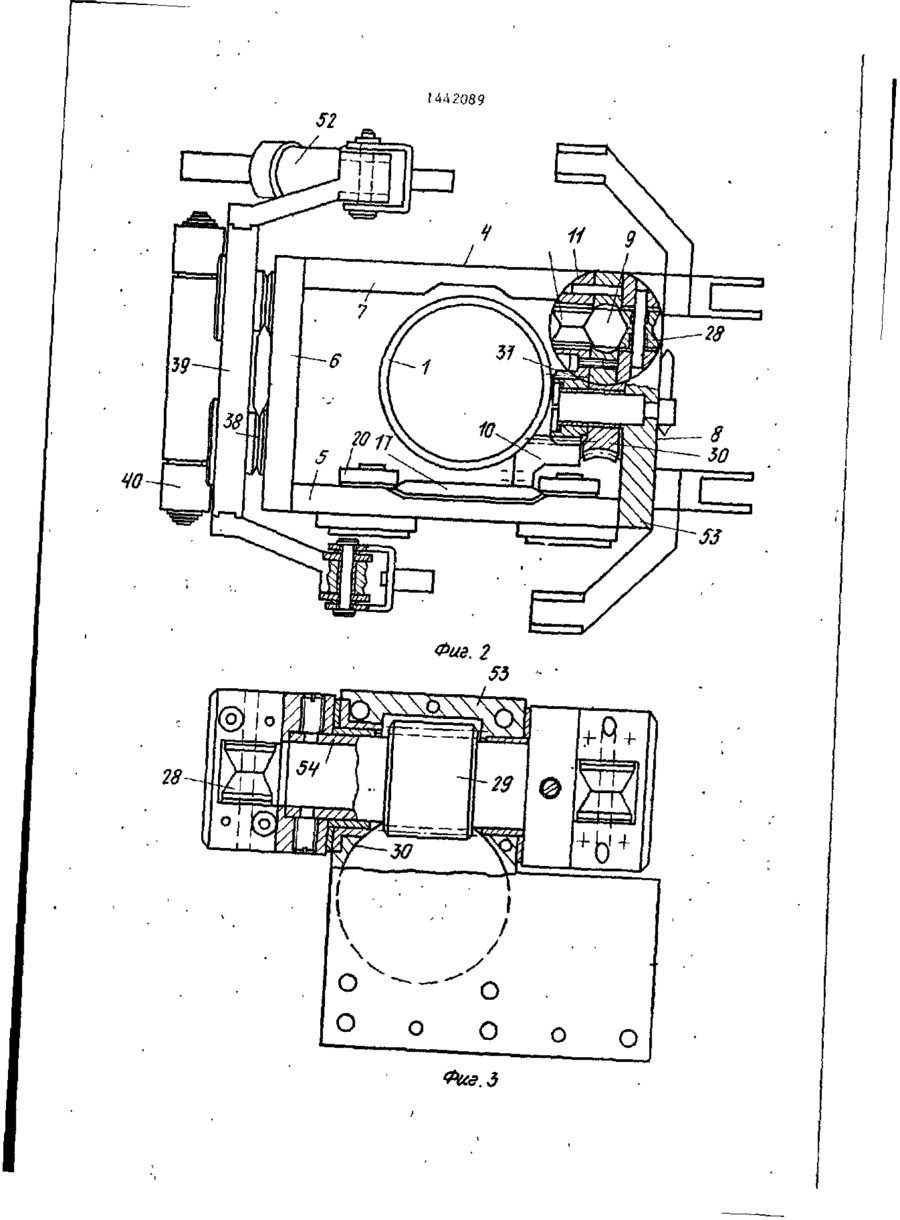
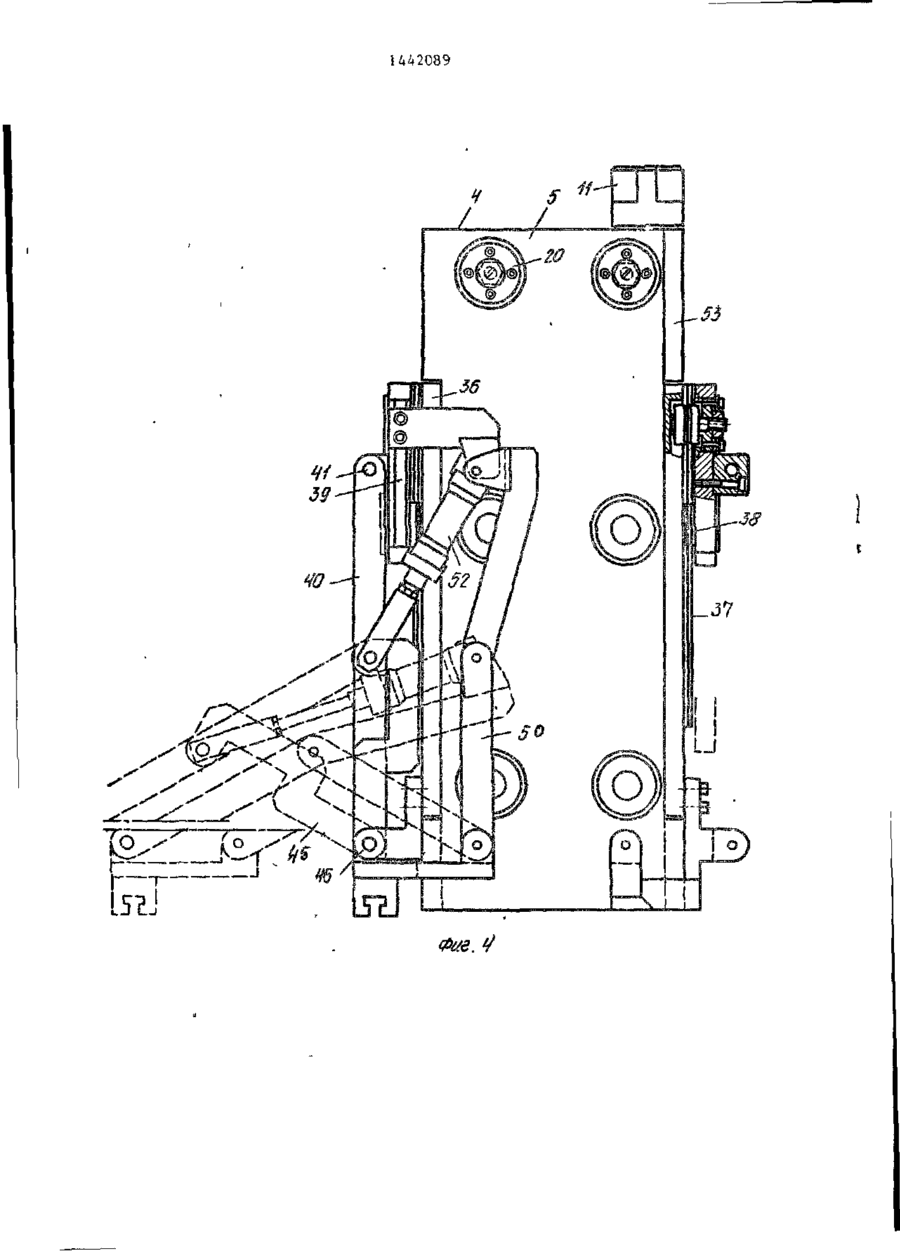
Изобретение относится к контрольно-измерительной технике и п р е д н а з н а чено для использования при в н у т р е н нем контроле цилиндрических р е з е р в у а ров, например напорных резервуаров ядерных реакторов. Цель изобретения обеспечение ультразвуковой дефектоскопии кольцевых швов на вертикально расположенном баллонообраэном коллекторе горизонтально расположенного G 01 N 27/90, 29/04, G 01 М 19/00 парогенератора и дефектоскопии с помощью вихреаых токов горизонтально находящихся радиально входящих в коллектор теплообменных труб (игольчатые трубы). Манипулятор состоит из Мачты, на нижнем и верхнем концах установленной с возможностью вращения, с перем ешакицимс я вдоль нее суппортом для держателя контрольной системы. Привод суппорта в движение происходит через расположенный параллельно мачте приводной шпиндель, приводная головка которого установлена в суппорте и находится в зацеплении с расположенной на мачте зубчатой рейкой. Держатели средств внхретокового и ультразвукового контроля закреплены на раме суппорта и плотно прилегают к коробообразному суппорту. Их кронштейны являются откидными и обеспечивают контакт преобразователей дефектоскопов с контролируемыми поверхностями. 10 з , п . ф-лы, 8 ил. да I 1442089 Изобретение относится к контрольно-измерительной технике и предназначено для использования при внутреннем контроле цилиндрических резервуаров, например напорных резервуаров ядерных реакторов. Цель изобретения - обеспечение ультразвуковой дефектоскопии кольцевых швов на вертикально расположенto ном баллонообразном коллекторе гори-: зонтально расположенного парогенератора и дефектоскопии с помощью вих~ ревых токов горизонтально проходящих радиально входяшдх в коллектор теплообменных труб (игольчатые трубы), На фиг. 1 представлен манипулятор, общий вид; на фиг. 2 - то же, вид сверху; на фиг. 3 - приводная головка, вид сверху; на Фиг. 4 - держатель 20 средств ультразвукового контроля; на фиг. 5 - то же, вид сбоку; на фиг. 6 держатель средств вихретокового контроля; на фиг, 7 - то же, вид сбоку; на фиг. 8 - то же, вид сверху. 25 Манипулятор для внутреннего контроля цилиндрических резервуаров содержит трубообраэную мачту 1, расположенную на нижнем конце мачты пяту, выполненную в виде аксиальной мачты центрирующей звезды 2, в которой мачта I установлена с возможностью вращения вокруг своей оси, расположенный на верхнем конце центровочный подшипниковый узел, выполненный в виде установленной на мачте 2 несущей 35 звезды 3 с зубчатым венцом. Мачта 1 охвачена установленным с возможность^ перемещения вдоль нее суппортом 4, предназначенным для установки на нем контрольного, "измерительного или смотрового устройства. Суппорт 4 включает коробчатообразную открытую сверху и снизу рану со стенками 5 - 8 , охватывающую мачту 1 45 и параллельные ей приводной шпиндель 9 и зубчатую рейку 10, и приводную головку I 1 , установленную на раме с возможностью вращения вокруг оси, параллельной мачте, и взаимодействую50 щую со шпинделем 9 и рейкой 10, Манипулятор содержит также коробообразный корпус 12, охватывающий мачту, высота корпуса больше высоты суппорта, а его нижняя часть предназначена для установки на фланце кон- 55 тролируемого резервуара (не показан). На корпусе 12 закреплен приводной двигатель 13 с шестерней 14. Приводной шпиндель 9 установлен одним концам в подшипниковом узле 15 пяты и кинематически связан с узлом 16 привода поджатия и опускания суппорта 4, зубчатый венец несушей звезды 3 взаимодействует с шестерней 14 приводного двигателя ЇЗ, На мачте I закреплена направляющая для суппорта, выполненная в виде скользящей плиты 17 линейной системы каретки. На верхнем краю корпуса 12 на цапфовых опорах 18 установлена кольцеобразная система каретки, скользящее кольцо 19 которой кинематически связано с несушей звездой 3. На внутренней стороне стенки 5 рамы установлены цапфовые опоры 20, взаимодеиствуюжие со скользящей плитой 17. Корпус 12 выполнен в виде верхнего несущего кольца 21, нижнего несущего кольца 22 и нескольких несущих колонн 23, связывающих оба несущих кольца. Каждая колонна состоит из двух телескопически сцепляемых одна с другой труб 24 и 25. Внутренняя труба 25 каждой колонны выполнена с гайкой 26, с которой входит в зацепление шпилька 27, установленная с возможностью вращения на верхнем несущем кольце 21. Приводной шпиндель 9 имеет шестигранный профиль, а приводная головка 11 взаимодействует с ним посредством направляющих роликов 28, имеющих U-образно прорезанные канавки. При этом приводная головка выполнена с охватывающим лриводной шпиндель 9 червяком 29, который через червячное колесо 30 и связанное с ним зубчатое колесо 31 находится в зацеплении с зубчатой рейкой 10. Центрирующая звезда 2 выполнена в виде фермы 32 с двумя установленными радиально к мачте регулируемыми упорами 33 и шарнирно чакрепленного на ферме 32 бананообразного согнутого рычага 34, установленного симметрично обоим упорам 33 с возможностью перемещения радиальчо мачте, и подъемного привода 35, ток которого шарнирно соединен со свободным концом рычага 34, а его корпус гоярнирно соединен с фермой 32. Боковая стенка 7, противолежащая боковой стенке 5, предусмотрена для приема изображенного нн фиг. 6-8 держателя средств пихретокпного Уонтроля теплообменныч Tpvo, яxiv ятих в 1442089 коллектор» Обе другие противоположные между точкой воздействия кривошипа одна другой боковые стенки б и 8 45 на рычаг 40 и ведомым концом рыпредусмотрены для приема по одному чага 48. На фиг. 4 держатель 43 в держателю средств ультразвукового . с выдвинутом состоянии изображен законтроля кольцевых швов коллектора„ штрихованным. На каждой стороне основДля этого согласно фиг. 4 в боковые ной плиты 36 может быть предусмотрестенки 6 и 8 могут быть вставлены осно по одному подъемному приводу 52» новные плиты 36, на которых располоСогласно фиг, 2, 4 и 5 в верхнюю жен держатель ультразвукового средст- 10 часть боковой стенки 8 вставлена осва контроля. Каждый держатель выполновная плита 53, на которой закрепнен согласно фиг. 4 и 5 как двойное лена приводная головка -! 1 суппорта 4. Приводная головка 11 содержит две • коромысло Еванса. пары направляющих роликов 28, имеющих На каждой основной плите 36 закреплена перемещающаяся в вертикаль- 15 U-образно прорезанные канавки, котоном направлении скользящая плита 37 рый находятся в зацеплении с шестилинейной системы каретки, вдоль котогранно выполненным приводным шпиндерой посредством цапфовой опоры 38 молем 9. Вкладыши этих направляющих рожет перемещаться каретка 39, На поликов соединены через трубы 54» на следней своим ведомым концом закреп- 20 которой сидит охватывающий приводной лен рычаг приводного коромысла Еваншпиндель червяк 29. Труба 54 через са. необозначенный более подробно сколь-• зящий подшипник установлена в плите Второе приводное коромысло Еванса имеет двуплечий рычаг 40, который по53„ Червяк 29 находится в зацеплении 25 с червячным колесом 30, которое соесредством пальца 41 установлен з . стойке 42 подшипника, закрепленной" динено с зубчатым колесом 31 и вместе на каретке 3-9. К свободному концу рыс ним установлено в стенке 8. чага 40 шарнирно подсоединен держаСредство вихретокового контроля тель 43 контрольной головки. Приблизисодержит основную плиту 55, которая тельно в середине рычага 40 через 30 может быть разъемно соединена в мепальцы 44 воздействуют два параллельно стах соединения с боковой стенкой 7 'действующих кривошипа 45, которые " рамы суппорта. На основной плите 55 своим концом шарнирно присоединены на ее передней стороне расположен бак ушкам 46, Последние являются частью рабан 56 скользящего шланга зонда 57 держателя 47, закрепленного на основной плите 36, Первое (имеющееся в двойном исполнении) предусмотренное с двух сторон на основной плите 36 приводное коромысло Еванса состоит из двуплечего рычага 48, который ведомым концом через угольник 49 шарнирно присоединен к каретке 39, а свободный конец которого также присоединен к держателю 43 средства контроля. В середине рычаг 48 соединен с кривошипом 50, который другим концом шарнирно присоединен к ушку 51, также предусмотренному на держателе 47, Обе системы приводных коромысел Еванса расположены перпендикулярно к основной плите 36 и вместе с тем с параллельным сдвигом одна к другой в направлении выдвигания держателя 43^ чтобы обеспечить точное!перемещение дер7
ДивитисяДодаткова інформація
Назва патенту англійськоюManipulator for internal control of cylindrical reservoirs
Назва патенту російськоюМанипулятор для внутреннего контроля цилиндрических резервуаров
МПК / Мітки
МПК: G21C 17/003, B25J 9/02, F22B 37/00, B25J 11/00
Мітки: контролю, циліндричних, резервуарів, внутрішнього, маніпулятор
Код посилання
<a href="https://ua.patents.su/12-6087-manipulyator-dlya-vnutrishnogo-kontrolyu-cilindrichnikh-rezervuariv.html" target="_blank" rel="follow" title="База патентів України">Маніпулятор для внутрішнього контролю циліндричних резервуарів</a>
Маніпулятор
Номер патенту: 188
Опубліковано: 30.04.1993
Автори: Шумейко Дмитро Іванович, Кравчун Степан Іванович, Мілушин Тимофій Тимофійович
МПК: B25J 9/00
Мітки: маніпулятор
Формула / Реферат:
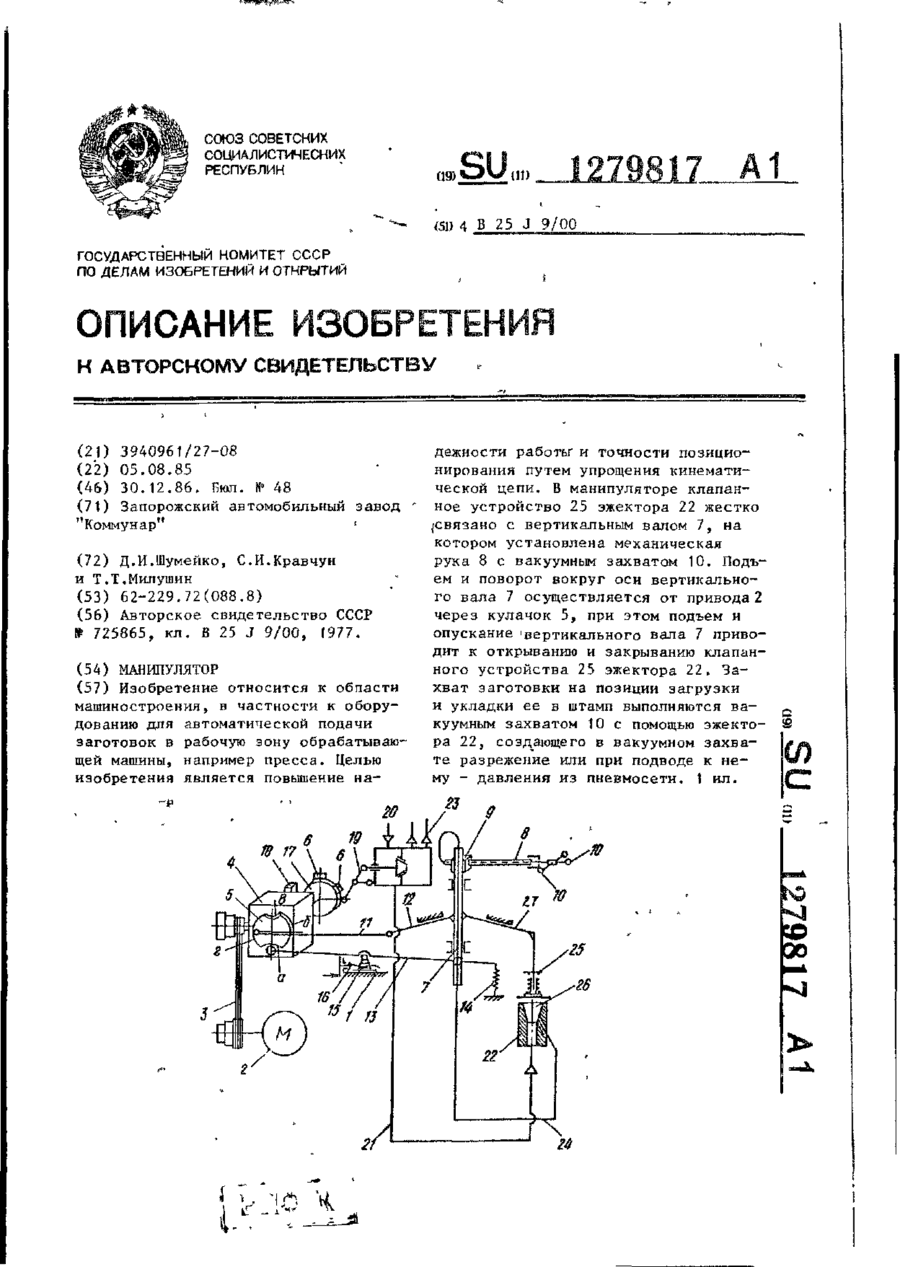
Формула изобретенияМанипулятор, содержащий механическую руку с пневматическими захватными органами, установленную на вертикальном валу, связанном посредством рычажной системы, с приводом ее подъема и поворота, кулачки, закрепленные на валу редуктора и взаимодействующие с пневмоклапаном, связанным трубопроводом с пневматическими механизмами, и эжектор с клапанным устройством, связанный трубопроводом с пневматическими захватными...
Пристрій для очистки зовнішньої поверхні циліндричних виробів
Номер патенту: 5214
Опубліковано: 28.12.1994
Автори: Солтис Віталій Петрович, Григоренко Анатолій Іванович, Гольденберг Анатолій Менделєвич, Яровий Семен Ілліч, Головньов Микола Васильович, Пархомчук Олексій Талимонович
МПК: B08B 9/02
Мітки: циліндричних, очистки, зовнішньої, виробів, пристрій, поверхні
Текст:
...раму, установленный на ней полый привод- 30 г -й ротор с выдвижными упорами и смонтированными на нем блоками очистных инструментов с механизмом их подвода-отвода и прижима к очищаемой поверхности изделий, содержащем закрепленные на ро- 35 торе попарно симметрично относительно его продольной оси направляющие с подпружиненными ползунами, имеющими ролики, каждый из которых закреплен на соответствующем ползуне, установленном 40 подвижно в...
Кутова головка для обкладки циліндричних виробів гумовою сумішшю
Номер патенту: 648
Опубліковано: 15.12.1993
Автор: Зінченко Анатолій Іванович
МПК: B29C 47/20, B29C 47/22
Мітки: циліндричних, головка, виробів, кутова, сумішшю, обкладки, гумовою
Формула / Реферат:
Формула изобретения1. Угловая головка для обкладки цилиндрических изделий резиновой смесью, содержащая корпус, во входной зоне которого размещен наконечник червяка, в зоне поворота с возможностью осевого перемещения смонтирована цилиндрическая направляющая и в выходной зоне установлены с образованием формующего канала дорн, закрепленный на цилиндрической направляющей, и мундштук со средствами регулирования его положения, причем в зоне...
Пристрій для контролю вертикального установлення деталей
Номер патенту: 84
Опубліковано: 30.04.1993
Автор: Ільїчев Анатолій Федорович
МПК: G01M 19/00, G01C 15/10
Мітки: пристрій, деталей, вертикального, контролю, установлення
Формула / Реферат:
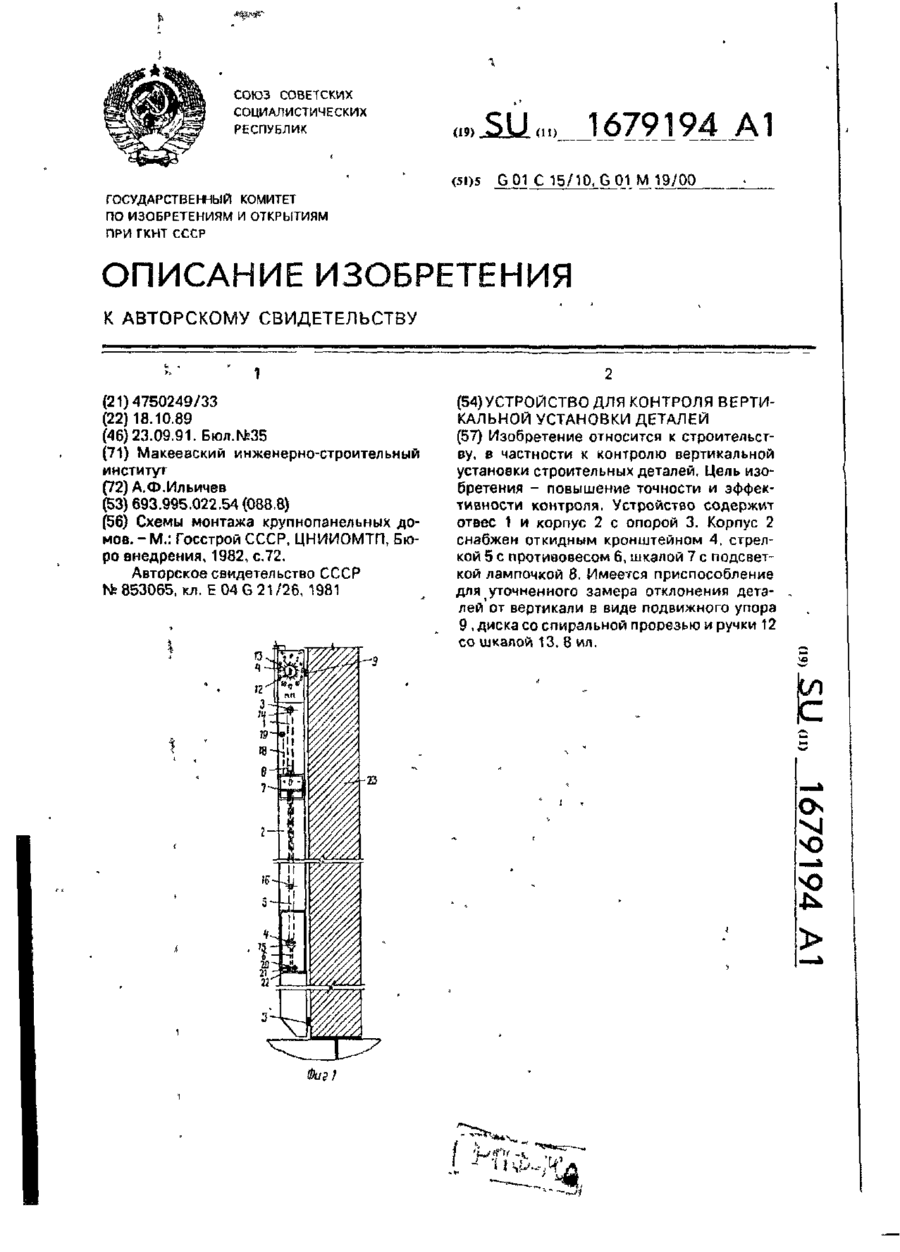
Формула изобретенияУстройство для контроля вертикальной установки деталей, содержащее отвес и корпус с опорой, отличающееся тем, что, с целью повышения точности и эффективности контроля, корпус снабжен откидным кронштейном, стрелкой с противовесом, шкалой с подсветкой и приспособлением для замера отклонения деталей от вертикали, причем корпус выполнен в виде полой рейки прямоугольного сечения, приспособление для замера отклонения деталей от...
Пристрій для неруйнівного контролю ціліндричних виробів
Номер патенту: 2791
Опубліковано: 26.12.1994
Автори: Карпаш Олег Михайлович, Ковалів Богдан Іванович
МПК: G01N 29/26
Мітки: пристрій, контролю, виробів, циліндричних, неруйнівного
Формула / Реферат:
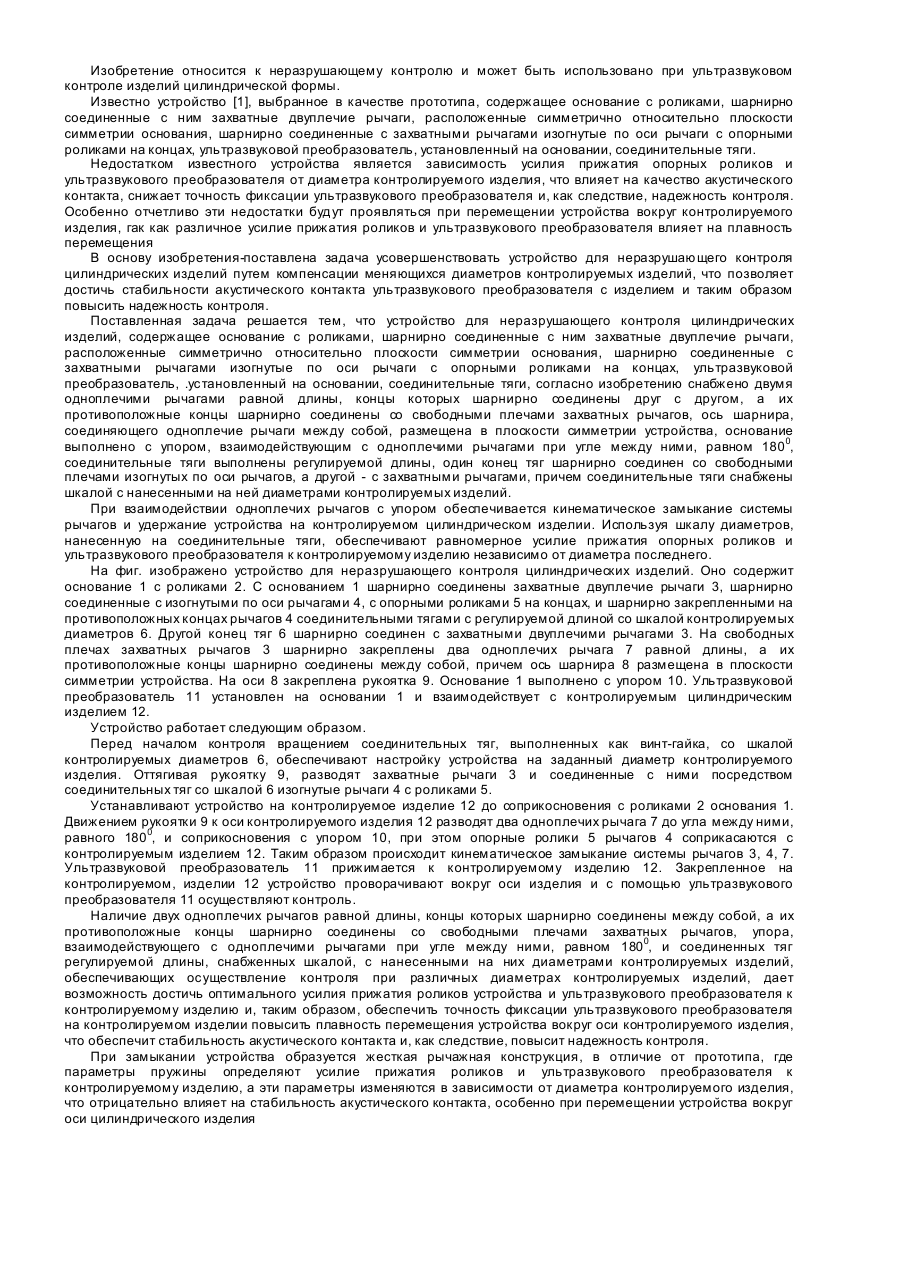
1. Устройство для неразрушающего контроля цилиндрических изделий, содержащее основание с роликами, шарнирно соединенные с ним захватные двуплечие рычаги, расположенные симметрично относительно плоскости симметрии основания, шарнирно соединенные с захватными рычагами изогнутые по оси рычаги с опорными роликами на концах, ультразвуковой преобразователь, установленный на основании, соединительные тяги, отличающееся тем, что устройство снабжено...
Попередній патент: Спосіб отримання 3-арілоксі-3-заміщених пропанамінів або їх фармакологічно прийнятних кислотно-адитивних солей
Наступний патент: Герметичний компресор
Випадковий патент: Горілка "тещин продукт"