Маніпулятор
Формула / Реферат
Маніпулятор, що містить послідовно з'єднані механізми повороту, нахилу та лінійного переміщення робочого органа, який відрізняється тим, що механізм нахилу виконано на основі двокоромислового чотириланкового шарнірного механізму, коромисла якого мають рівну довжину і в нейтральному положенні спрямовані до геометричного центру маніпулятора, а механізм лінійного переміщення виконано у вигляді щонайменше двох шарнірних паралелограмів, послідовно з'єднаних шатунами, причому основа першого паралелограма та шатун останнього сполучені стягуючим пружним елементом, лінія дії якого паралельна напрямку лінійного переміщення робочого органа.
Текст
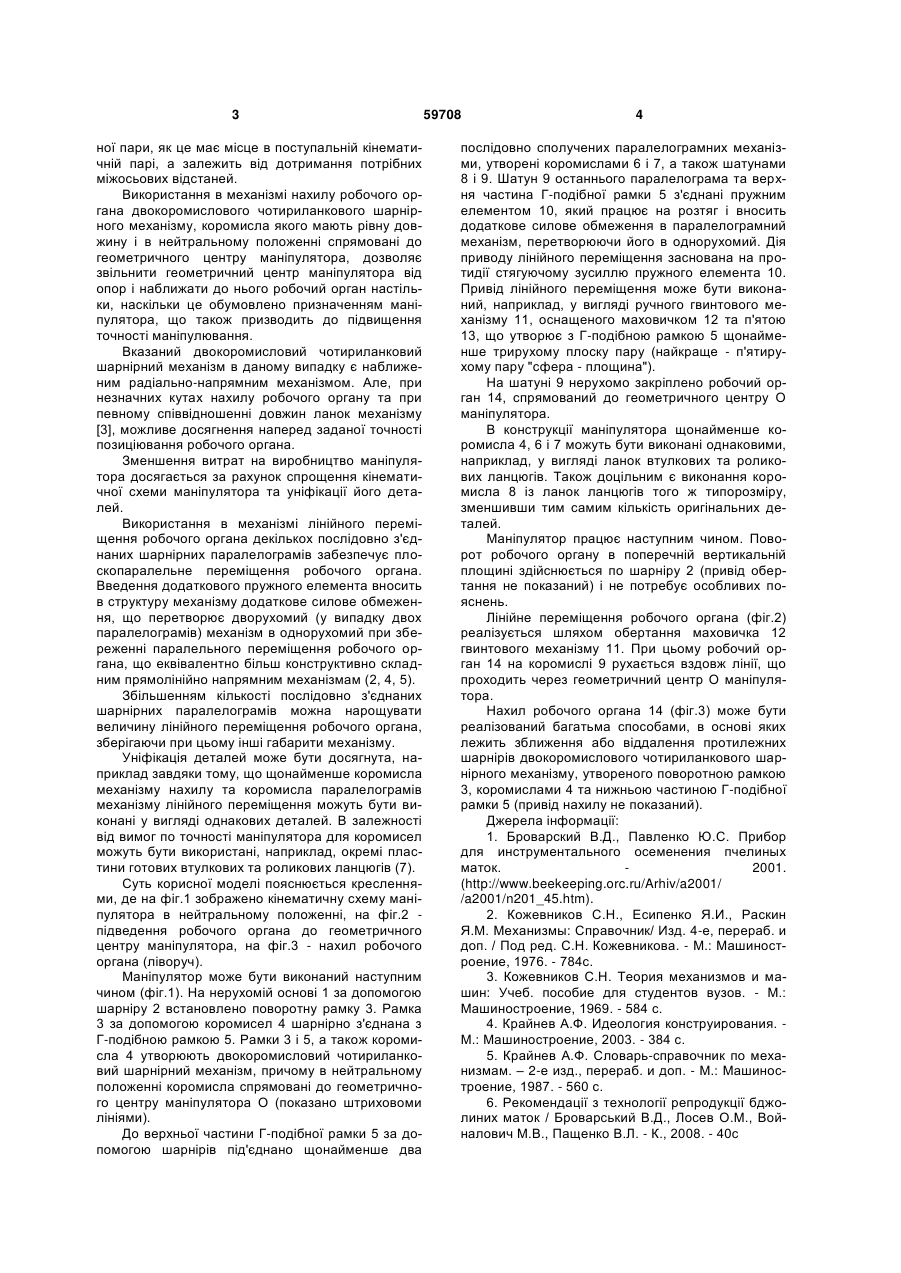
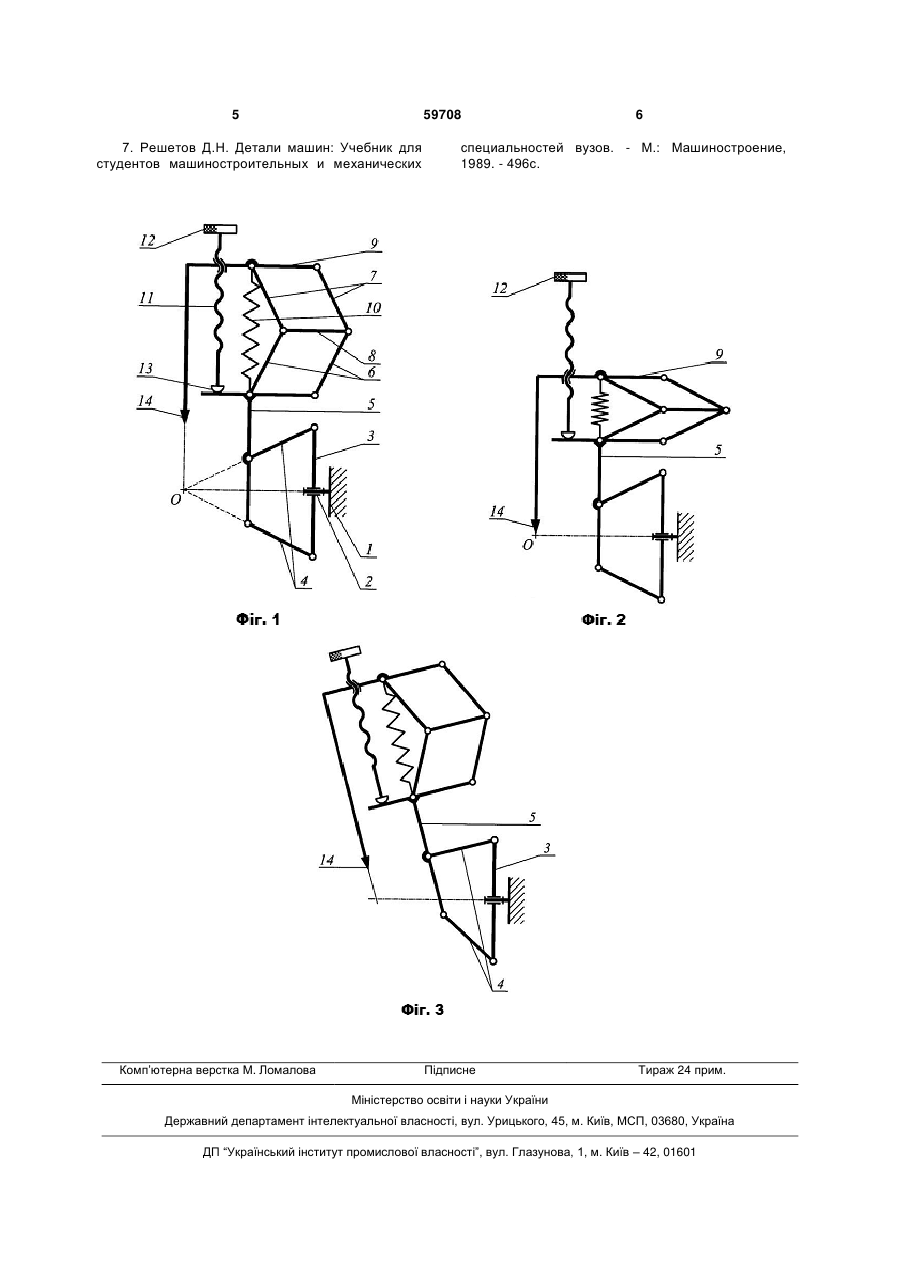
Маніпулятор, що містить послідовно з'єднані механізми повороту, нахилу та лінійного переміщення робочого органа, який відрізняється тим, що механізм нахилу виконано на основі двокоро 3 ної пари, як це має місце в поступальній кінематичній парі, а залежить від дотримання потрібних міжосьових відстаней. Використання в механізмі нахилу робочого органа двокоромислового чотириланкового шарнірного механізму, коромисла якого мають рівну довжину і в нейтральному положенні спрямовані до геометричного центру маніпулятора, дозволяє звільнити геометричний центр маніпулятора від опор і наближати до нього робочий орган настільки, наскільки це обумовлено призначенням маніпулятора, що також призводить до підвищення точності маніпулювання. Вказаний двокоромисловий чотириланковий шарнірний механізм в даному випадку є наближеним радіально-напрямним механізмом. Але, при незначних кутах нахилу робочого органу та при певному співвідношенні довжин ланок механізму [3], можливе досягнення наперед заданої точності позиціювання робочого органа. Зменшення витрат на виробництво маніпулятора досягається за рахунок спрощення кінематичної схеми маніпулятора та уніфікації його деталей. Використання в механізмі лінійного переміщення робочого органа декількох послідовно з'єднаних шарнірних паралелограмів забезпечує плоскопаралельне переміщення робочого органа. Введення додаткового пружного елемента вносить в структуру механізму додаткове силове обмеження, що перетворює дворухомий (у випадку двох паралелограмів) механізм в однорухомий при збереженні паралельного переміщення робочого органа, що еквівалентно більш конструктивно складним прямолінійно напрямним механізмам (2, 4, 5). Збільшенням кількості послідовно з'єднаних шарнірних паралелограмів можна нарощувати величину лінійного переміщення робочого органа, зберігаючи при цьому інші габарити механізму. Уніфікація деталей може бути досягнута, наприклад завдяки тому, що щонайменше коромисла механізму нахилу та коромисла паралелограмів механізму лінійного переміщення можуть бути виконані у вигляді однакових деталей. В залежності від вимог по точності маніпулятора для коромисел можуть бути використані, наприклад, окремі пластини готових втулкових та роликових ланцюгів (7). Суть корисної моделі пояснюється кресленнями, де на фіг.1 зображено кінематичну схему маніпулятора в нейтральному положенні, на фіг.2 підведення робочого органа до геометричного центру маніпулятора, на фіг.3 - нахил робочого органа (ліворуч). Маніпулятор може бути виконаний наступним чином (фіг.1). На нерухомій основі 1 за допомогою шарніру 2 встановлено поворотну рамку 3. Рамка 3 за допомогою коромисел 4 шарнірно з'єднана з Г-подібною рамкою 5. Рамки 3 і 5, а також коромисла 4 утворюють двокоромисловий чотириланковий шарнірний механізм, причому в нейтральному положенні коромисла спрямовані до геометричного центру маніпулятора О (показано штриховоми лініями). До верхньої частини Г-подібної рамки 5 за допомогою шарнірів під'єднано щонайменше два 59708 4 послідовно сполучених паралелограмних механізми, утворені коромислами 6 і 7, а також шатунами 8 і 9. Шатун 9 останнього паралелограма та верхня частина Г-подібної рамки 5 з'єднані пружним елементом 10, який працює на розтяг і вносить додаткове силове обмеження в паралелограмний механізм, перетворюючи його в однорухомий. Дія приводу лінійного переміщення заснована на протидії стягуючому зусиллю пружного елемента 10. Привід лінійного переміщення може бути виконаний, наприклад, у вигляді ручного гвинтового механізму 11, оснащеного маховичком 12 та п'ятою 13, що утворює з Г-подібною рамкою 5 щонайменше трирухому плоску пару (найкраще - п'ятирухому пару "сфера - площина"). На шатуні 9 нерухомо закріплено робочий орган 14, спрямований до геометричного центру О маніпулятора. В конструкції маніпулятора щонайменше коромисла 4, 6 і 7 можуть бути виконані однаковими, наприклад, у вигляді ланок втулкових та роликових ланцюгів. Також доцільним є виконання коромисла 8 із ланок ланцюгів того ж типорозміру, зменшивши тим самим кількість оригінальних деталей. Маніпулятор працює наступним чином. Поворот робочого органу в поперечній вертикальній площині здійснюється по шарніру 2 (привід обертання не показаний) і не потребує особливих пояснень. Лінійне переміщення робочого органа (фіг.2) реалізується шляхом обертання маховичка 12 гвинтового механізму 11. При цьому робочий орган 14 на коромислі 9 рухається вздовж лінії, що проходить через геометричний центр О маніпулятора. Нахил робочого органа 14 (фіг.3) може бути реалізований багатьма способами, в основі яких лежить зближення або віддалення протилежних шарнірів двокоромислового чотириланкового шарнірного механізму, утвореного поворотною рамкою 3, коромислами 4 та нижньою частиною Г-подібної рамки 5 (привід нахилу не показаний). Джерела інформації: 1. Броварский В.Д., Павленко Ю.С. Прибор для инструментального осеменения пчелиных маток. 2001. (http://www.beekeeping.orc.ru/Arhiv/a2001/ /a2001/n201_45.htm). 2. Кожевников С.Н., Есипенко Я.И., Раскин Я.М. Механизмы: Справочник/ Изд. 4-е, перераб. и доп. / Под ред. С.Н. Кожевникова. - М.: Машиностроение, 1976. - 784с. 3. Кожевников С.Н. Теория механизмов и машин: Учеб. пособие для студентов вузов. - М.: Машиностроение, 1969. - 584 с. 4. Крайнев А.Ф. Идеология конструирования. М.: Машиностроение, 2003. - 384 с. 5. Крайнев А.Ф. Словарь-справочник по механизмам. – 2-е изд., перераб. и доп. - М.: Машиностроение, 1987. - 560 с. 6. Рекомендації з технології репродукції бджолиних маток / Броварський В.Д., Лосев О.М., Войналович М.В., Пащенко В.Л. - К., 2008. - 40с 5 59708 7. Решетов Д.Н. Детали машин: Учебник для студентов машиностроительных и механических Комп’ютерна верстка М. Ломалова 6 специальностей вузов. - М.: Машиностроение, 1989. - 496с. Підписне Тираж 24 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюManipulator
Автори англійськоюSamoilenko Oleksii Vasyliovych
Назва патенту російськоюМанипулятор
Автори російськоюСамойленко Алексей Васильевич
МПК / Мітки
Мітки: маніпулятор
Код посилання
<a href="https://ua.patents.su/3-59708-manipulyator.html" target="_blank" rel="follow" title="База патентів України">Маніпулятор</a>
Маніпулятор
Номер патенту: 9564
Опубліковано: 17.10.2005
Автори: Бергер Євгеній Емильович, Бергер Еміль Григорович, Табацков Вячеслав Петрович, Іванов Геннадій Олександрович
МПК: B25J 11/00
Мітки: маніпулятор
Формула / Реферат:
Маніпулятор, який має основу з силовим циліндром та захоплювач руки робота, який відрізняється тим, що він обладнаний кривошипно-шатунним механізмом, ланки якого шарнірно закріплені до штока корпусу силового циліндра кулісою, яка оснащена розмічальними штифтами.
Маніпулятор для зміни заглибного стакана на машині безперервного лиття заготівок
Номер патенту: 52122
Опубліковано: 10.08.2010
Автори: Санжаревський Олег Васильович, Снежинський Олексій Ігоревич, Пакін Володимир Арсентіович, Казаков Олександр Васильович
МПК: B22D 41/50
Мітки: маніпулятор, безперервного, машини, стакана, лиття, зміни, заготівок, заглибного
Формула / Реферат:
1 .Маніпулятор для зміни заглибного стакана на машині безперервного лиття заготівок, що містить штангу з гільзою для втримання стакана, механізми горизонтального та вертикального переміщення штанги, а також механізм повороту штанги, який відрізняється тим, що механізм повороту штанги виконаний у вигляді шарнірного дволанкового важільного механізму, одна ланка якого шарнірно з'єднана зі штангою, а друга ланка шарнірно з'єднана з механізмом...
Інструментальний маніпулятор
Номер патенту: 43879
Опубліковано: 10.09.2009
Автори: Дзержинський Віталій Олександрович, Залевський Костянтин Едуардович, Маринов Дмитро Всеволодович, Волошин Олексій Іванович, Удовенко Сергій Олександрович
МПК: B21J 13/00
Мітки: маніпулятор, інструментальний
Формула / Реферат:
Інструментальний маніпулятор, що містить станину, стіл, розміщений на спрямівниках станини з можливістю переміщення відносно них, поворотну обойму, опорні ролики, інструментальні штанги з інструментом, зв'язані з повзунами, встановленими на спрямівниках поворотної обойми, гідроциліндр механізму підйому інструменту і механізм обертання поворотної обойми, який відрізняється тим, що поворотна обойма виконана з упорами, розміщеними по колу на...
Ковальський маніпулятор
Номер патенту: 5654
Опубліковано: 15.03.2005
Автори: Роганов Лев Леонідович, Корчак Олена Сергіївна
МПК: B21J 13/00
Мітки: ковальський, маніпулятор
Формула / Реферат:
Ковальський маніпулятор, що містить маніпулюючий хобот, шасі у вигляді зварної рами, механізм пересування у вигляді двох колісних пар, які переміщуються уздовж рейкового шляху і рух яким задається від приводу, який відрізняється тим, що оснащений додатковою колісною парою, що зв’язана з задньою колісною парою механізму пересування маніпулятора через регульований важіль, а з передньою - через важіль жорсткості, причому важелі оснащено...
Маніпулятор

Номер патенту: 50260
Опубліковано: 15.10.2002
Автори: Вігдергауз Леонід Павлович, Москаленко Олександр Володимирович
МПК: E21B 1/00
Мітки: маніпулятор
Формула / Реферат:
Маніпулятор, що складається із стріли, шарнірно приєднаної до нерухомої напрямної телескопічного подавача бурильної машини, спареного гідроциліндра переміщення подавача нагору і вниз, гідроциліндра переміщення стріли маніпулятора у вертикальній площині, гідроциліндра повороту стріли маніпулятора за допомогою рейкової зубчатої передачі і кронштейна, до якого приєднана стріла, і гідроциліндра переміщення стріли у вертикальній площині, який...
Попередній патент: Пристрій для протидії ураганам
Наступний патент: Станок для гоління зі зволожуючим валиком
Випадковий патент: Електричний спосіб вимірювання параметрів імпедансу біооб'єктів