Захватний пристрій


Формула / Реферат
1. Захватний пристрій (1) для маніпулювання розміщеними в обробному приміщенні (2) компонентами із операторського приміщення (4), відокремленого від обробного приміщення (2) перегородкою (6), який містить пропущений крізь перегородку (6) порожнистий вал (8), на розміщеному в обробному приміщенні (2) кінці (12) якого встановлений керований тягою (16) захват (14), причому тяга (16) пропущена всередині порожнистого вала (8) і зв'язана з органом (20) керування, встановленим на розміщеному в операторському приміщенні (4) кінці порожнистого вала (8).
2. Захватний пристрій (1) за п. 1, тяга (16) якого виконана у вигляді тягового тросика.
3. Захватний пристрій (1) за п. 1 або 2, в якому захват (14) містить певну кількість захватних лап (52), попарно взаємодіючих подібно кліщам.
4. Захватний пристрій (1) за одним із пп. 1-3, порожнистий вал (8) якого встановлений у перегородці (6) у кульовому шарнірі (10).
5. Захватний пристрій (1) за п. 4, кульовий шарнір (10) якого містить встановлену у двох напівчашках (32, 34) напрямну кулю (30) для порожнистого вала (8).
6. Захватний пристрій (1) за одним із пп. 1-5, порожнистий вал (8) якого встановлений з можливістю переміщення у поздовжньому напрямку.
7. Захватний пристрій (1) за п. 6, на розміщеній в обробному приміщенні (2) частині (38) порожнистого вала (8) якого встановлена охоплююча його ущільнювальна пластина (40), яка через сильфон (42), що охоплює порожнистий вал (8), герметично з'єднана з перегородкою (6).
Текст
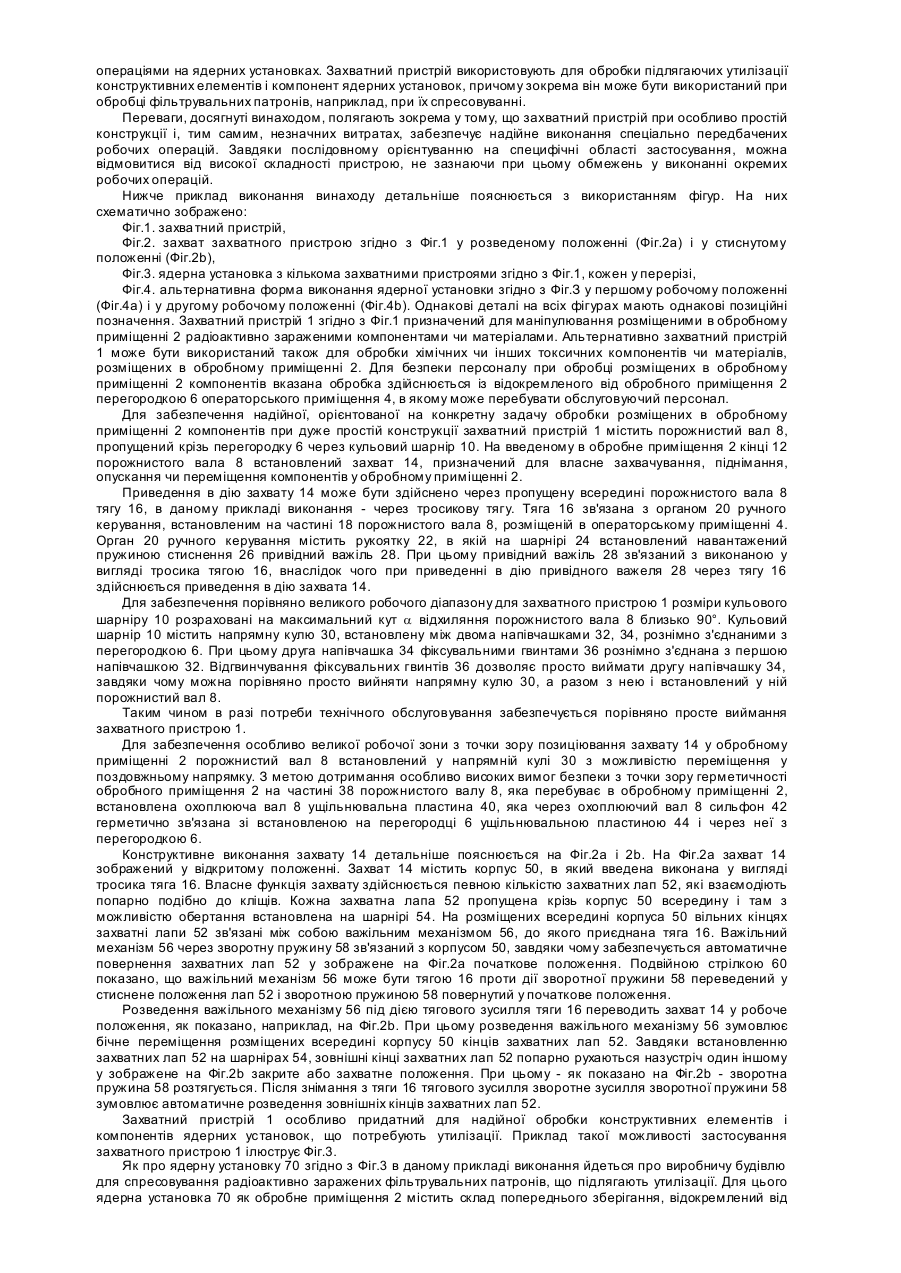
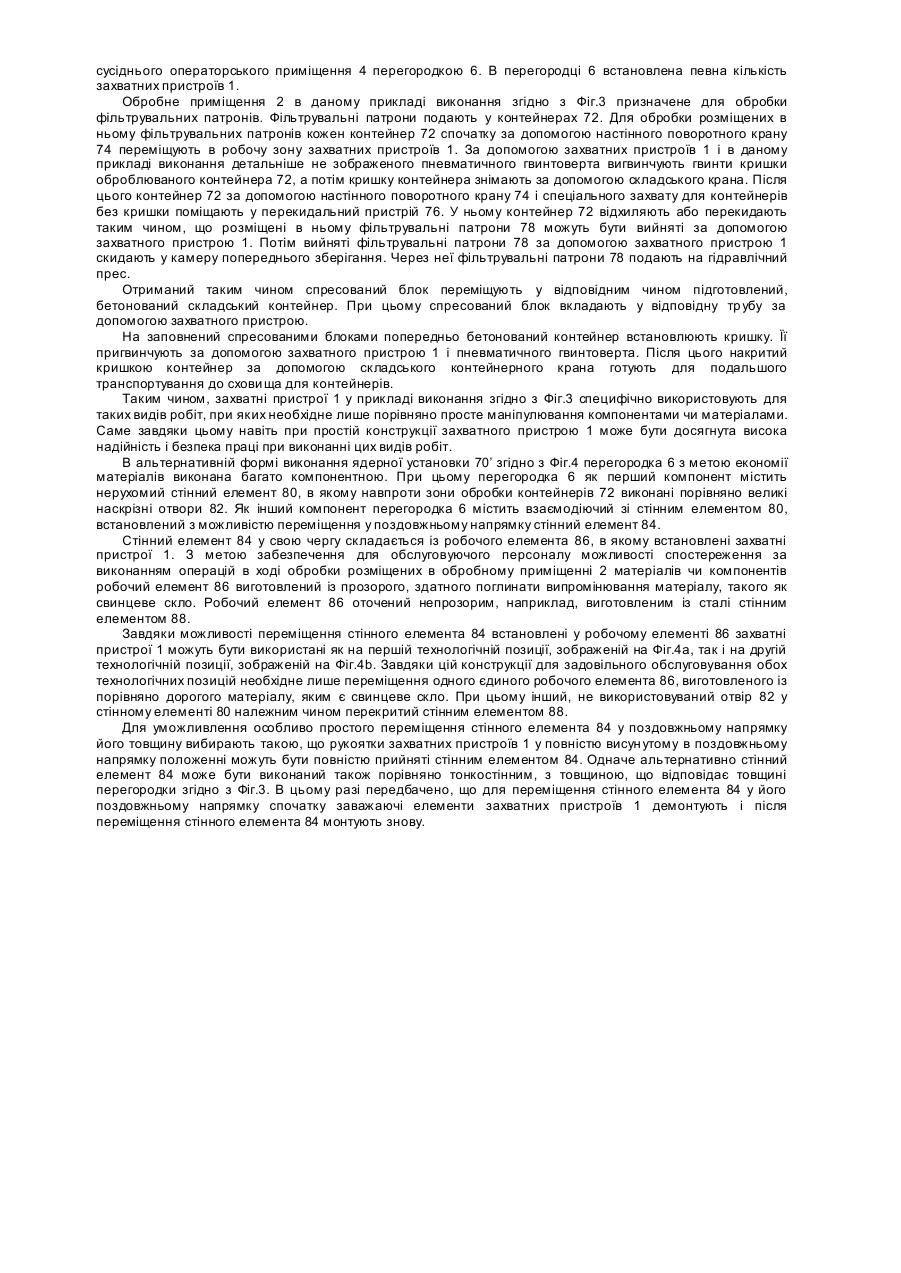
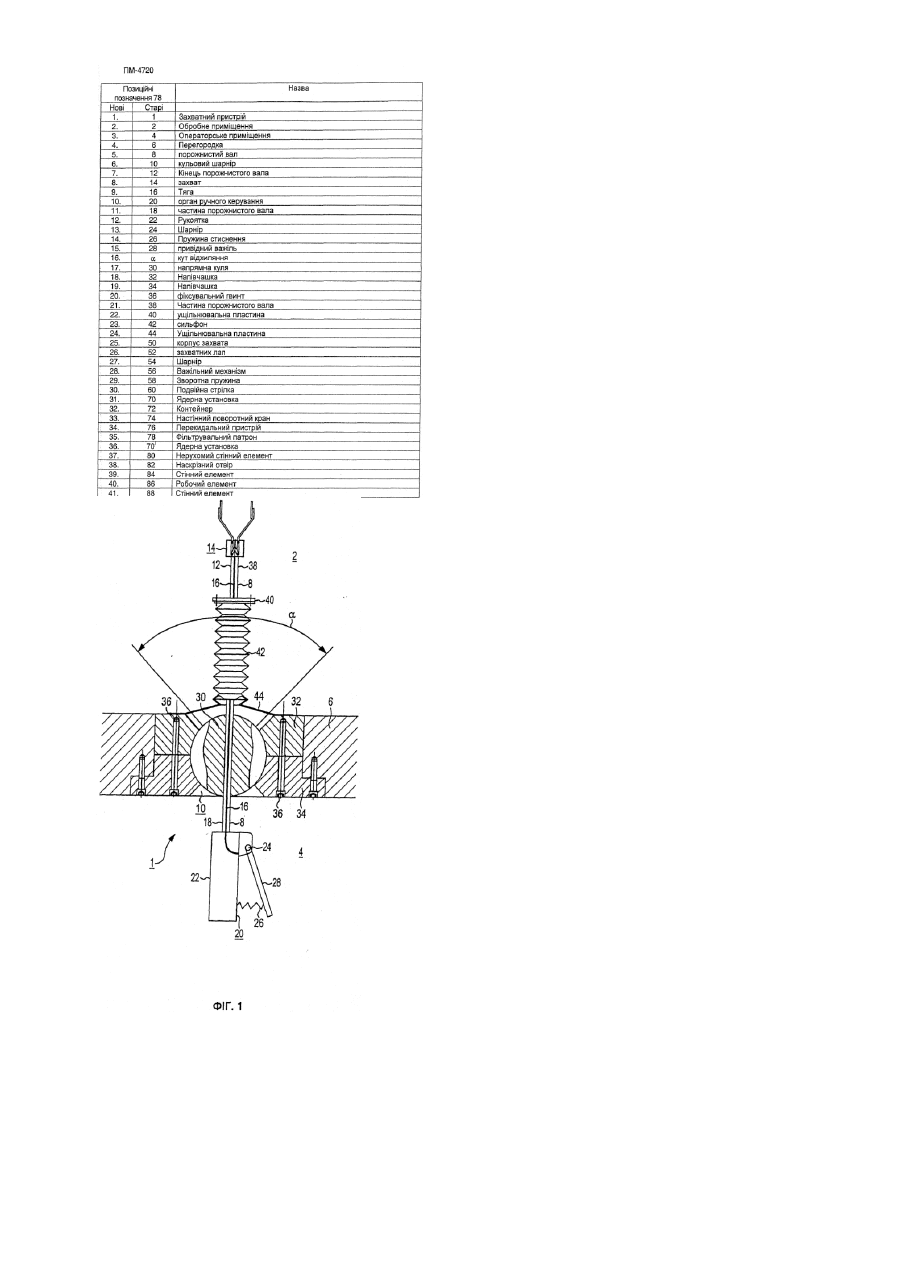
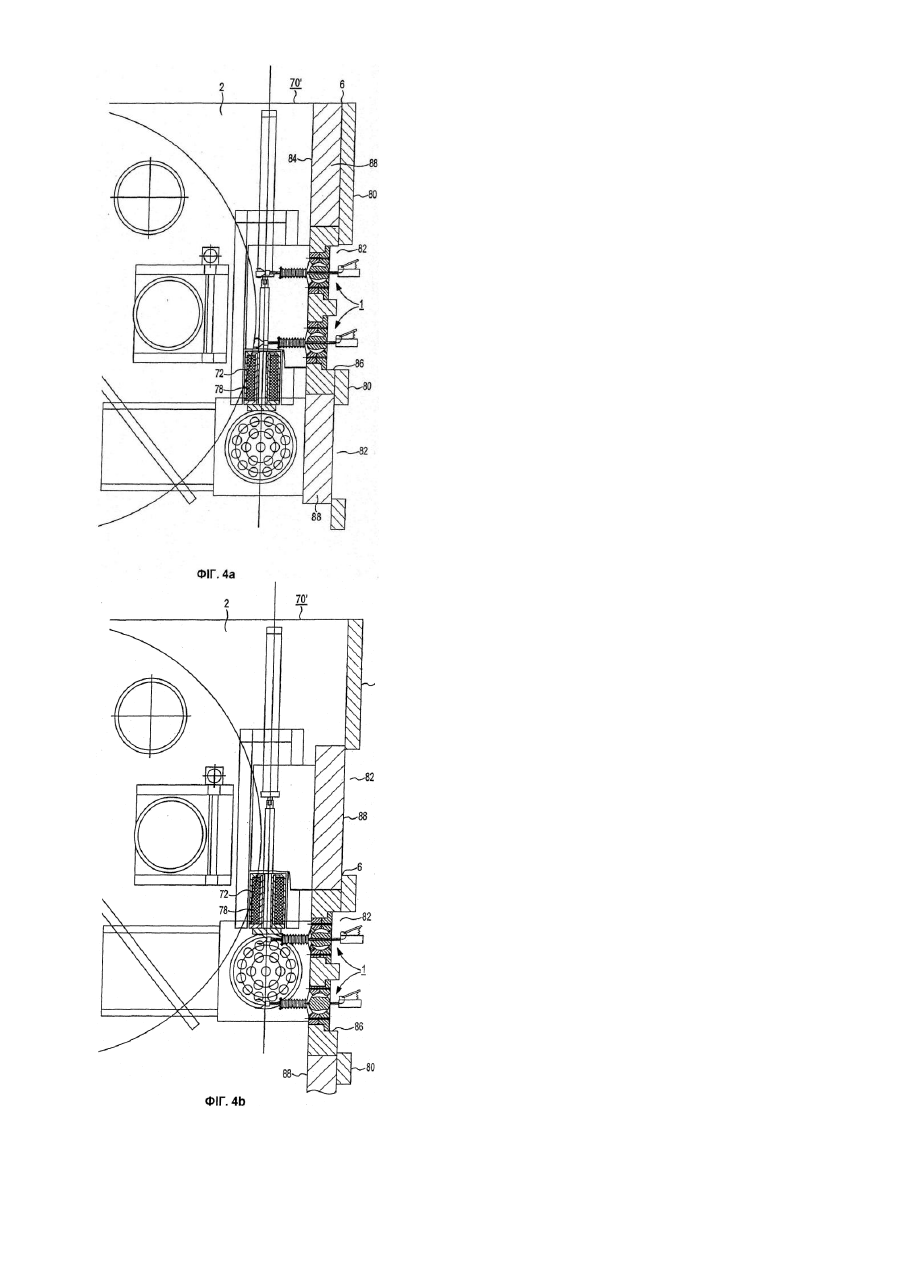
Винахід стосується захватного пристрою для маніпулювання розміщеними в обробному приміщенні компонентами із операторського приміщення, відокремленого від обробного приміщення перегородкою. В ядерних установках є багато робочих операцій, під час яких доводиться мати справу із радіоактивним матеріалом. При цьому мова може йти, наприклад, про обробку радіоактивних відходів, про обробку тепловидільних елементів або про зберігання радіоактивних матеріалів. Такі роботи виконуються зазвичай у відповідній виробничій будівлі ядерної установки. Саме при маніпулюванні можливо радіоактивно зараженими компонентами чи матеріалами з міркувань захисту від опромінення необхідно, щоб призначене для обробки компонентів чи матеріалів внутрішнє приміщення чи обробне приміщення такої виробничої будівлі завдяки своїй будівельній конструкції забезпечувало достатнє екранування довкілля від радіоактивного випромінювання. Крім того, таке обробне приміщення з метою захисту обслуговуючого персоналу зазвичай із забезпеченням герметичності і екранування відокремлене перегородкою від розміщеного поруч операторського приміщення, з якого здійснюється маніпулювання розміщеними в обробному приміщенні компонентами чи матеріалами. В принципі така будівля може бути використана також для обробки хімічних чи токсичних матеріалів у хімічній промисловості. Власне маніпулювання розміщеними в обробному приміщенні компонентами чи матеріалами обслуговуючий персонал здійснює зазвичай за допомогою встановлених в перегородці дистанційно керованих маніпуляторів. Такі маніпулятори мають зазвичай певну кількість розміщених в операторському приміщенні рукояток керування, які оператори вручну приводять в дію. За допомогою зазвичай порівняно складної системи переміщення рукояток керування перетворюються у відповідні переміщення головок маніпулятора всередині обробного приміщення. Таким чином може бути забезпечене безпечне для персоналу маніпулювання розміщеними в обробному приміщенні компонентами чи матеріалами при постійному відокремленні обробного приміщення від операторського приміщення. Маніпулятори, призначені для таких систем, розраховані на перекриття всього спектру можливих виконуваних операцій і відповідно до цього виконані з можливістю порівняно точного юстирування, а також розраховані на прикладення порівняно великих виконавчих зусиль. А це означає, що такі маніпулятори зазвичай дуже складні і тому дуже дорогі. Тому в основу винаходу покладено задачу розробки захватного пристрою для маніпулювання розміщеними в обробному приміщенні компонентами із операторського приміщення, відокремленого від обробного приміщення перегородкою, який при дуже простій конструкції забезпечує безпечне маніпулювання розміщеними в обробному приміщенні компонентами чи матеріалами. Відповідно до винаходу ця задача вирішена за допомогою пропущеного крізь перегородку порожнистого вала, на введеному в обробне приміщення кінці якого з можливістю приведення в дію тягою встановлений захват, причому тяга пропущена всередині порожнистого вала і зв'язана з органом керування, встановленим на частині порожнистого вала, розміщеній в операторському приміщенні. При цьому винахід ви ходить із міркування, що суттєве спрощення конструкції пристрою для обробки розміщених в обробному приміщенні компонентів чи матеріалів може бути здійснене шляхом попереднього послідовного структур ування і розділення за складністю областей застосування пристрою і виконуваних ним операцій. На противагу звичному досі підходу - розробці складних маніпуляторів для виконання усіх можливих видів операцій - передбачене специфічне узгодження пристрою для обробки матеріалів і компонентів з точки зору його складності з певними областями застосування. При цьому суттєве спрощення пристрою може бути здійснене для тих випадків, в яких необхідні види діяльності при обробці компонентів і матеріалів охоплюють виключно порівняно прості маніпуляції чи операції, такі як захват деталі, знімання деталі, піднімання чи опускання деталі чи також переміщення деталі. Специфічно орієнтований на ці види робіт захватний пристрій як основний елемент, призначений для власне маніпуляцій з матеріалами чи компонентами, містить захват, який має бути придатним чином керованим із операторського приміщення. Для дотримання особливої простоти конструкції керування захватом здійснюється за допомогою тяги, пропущеної всередині порожнистого вала. Особлива простота конструкції при високій надійності і простому обслуговуванні досягається в разі виконання тяги у вигляді тягового тросика. Захват захва тного пристрою у найпростішій формі виконання розрахований на механічне утримання компоненти чи деталі. Для цього захват містить певну кількість захватних лап, попарно взаємодіючих подібно кліщам. Захватний пристрій розрахований на забезпечення порівняно великої зони коливання всередині обробного приміщення, завдяки чому захват, встановлений на кінці розміщеної в обробному приміщенні частини порожнистого вала, може бути позиційований у досить великій просторовій зоні обробного приміщення. Для цього порожнистий вал встановлений у перегородці за допомогою кульового шарніра. Розміри кульового шарніра розраховані таким чином, що забезпечується робоча зона порожнистого вала у об'ємному куті 90°. З метою дотримання порівняної простоти конструкції, яка, до того ж, забезпечить особливо простий доступ до порожнистого вала, наприклад, для технічного обслуговування чи заміни, у наступній доцільній формі виконання кульовий шарнір містить напрямну кулю, встановлену у дво х напівчашках. Особлива різноманітність з точки зору можливостей застосування захватного пристрою може бути досягнута завдяки встановленню порожнистого вала з можливістю переміщення в його поздовжньому напрямку. Саме у поєднанні з порівняно великою зоною коливання порожнистого вала додаткове його переміщення у поздовжньому напрямку забезпечує велику робочу зону для позиціювання захвату. Крім того, для дотримання високого ступеню безпеки при обробці радіоактивних чи токсичних компонент чи матеріалів у переважній формі виконання на розміщеній в обробному приміщенні частині порожнистого вала встановлена охоплююча його ущільнювальна пластина, яка через сильфон, що охоплює порожнистий вал, герметично з'єднана з перегородкою. Сильфон забезпечує досить високу рухливість захватного пристрою у поздовжньому напрямку порожнистого вала, не порушуючи герметичності пристрою в зоні рухомого встановлення порожнистого вала. Особливо доцільним є застосування захватного пристрою у зв'язку зі специфічними обробними операціями на ядерних установках. Захватний пристрій використовують для обробки підлягаючих утилізації конструктивних елементів і компонент ядерних установок, причому зокрема він може бути використаний при обробці фільтрувальних патронів, наприклад, при їх спресовуванні. Переваги, досягнуті винаходом, полягають зокрема у тому, що захватний пристрій при особливо простій конструкції і, тим самим, незначних витратах, забезпечує надійне виконання спеціально передбачених робочих операцій. Завдяки послідовному орієнтуванню на специфічні області застосування, можна відмовитися від високої складності пристрою, не зазнаючи при цьому обмежень у виконанні окремих робочих операцій. Нижче приклад виконання винаходу детальніше пояснюється з використанням фігур. На них схематично зображено: Фіг.1. захва тний пристрій, Фіг.2. захват захватного пристрою згідно з Фіг.1 у розведеному положенні (Фіг.2а) і у стиснутому положенні (Фіг.2b), Фіг.3. ядерна установка з кількома захватними пристроями згідно з Фіг.1, кожен у перерізі, Фіг.4. альтернативна форма виконання ядерної установки згідно з Фіг.З у першому робочому положенні (Фіг.4а) і у другому робочому положенні (Фіг.4b). Однакові деталі на всіх фігурах мають однакові позиційні позначення. Захватний пристрій 1 згідно з Фіг.1 призначений для маніпулювання розміщеними в обробному приміщенні 2 радіоактивно зараженими компонентами чи матеріалами. Альтернативно захватний пристрій 1 може бути використаний також для обробки хімічних чи інших токсичних компонентів чи матеріалів, розміщених в обробному приміщенні 2. Для безпеки персоналу при обробці розміщених в обробному приміщенні 2 компонентів вказана обробка здійснюється із відокремленого від обробного приміщення 2 перегородкою 6 операторського приміщення 4, в якому може перебувати обслуговуючий персонал. Для забезпечення надійної, орієнтованої на конкретну задачу обробки розміщених в обробному приміщенні 2 компонентів при дуже простій конструкції захватний пристрій 1 містить порожнистий вал 8, пропущений крізь перегородку 6 через кульовий шарнір 10. На введеному в обробне приміщення 2 кінці 12 порожнистого вала 8 встановлений захват 14, призначений для власне захвачування, піднімання, опускання чи переміщення компонентів у обробному приміщенні 2. Приведення в дію захвату 14 може бути здійснено через пропущену всередині порожнистого вала 8 тягу 16, в даному прикладі виконання - через тросикову тягу. Тяга 16 зв'язана з органом 20 ручного керування, встановленим на частині 18 порожнистого вала 8, розміщеній в операторському приміщенні 4. Орган 20 ручного керування містить рукоятку 22, в якій на шарнірі 24 встановлений навантажений пружиною стиснення 26 привідний важіль 28. При цьому привідний важіль 28 зв'язаний з виконаною у вигляді тросика тягою 16, внаслідок чого при приведенні в дію привідного важеля 28 через тягу 16 здійснюється приведення в дію захвата 14. Для забезпечення порівняно великого робочого діапазону для захватного пристрою 1 розміри кульового шарніру 10 розраховані на максимальний кут a відхиляння порожнистого вала 8 близько 90°. Кульовий шарнір 10 містить напрямну кулю 30, встановлену між двома напівчашками 32, 34, рознімно з'єднаними з перегородкою 6. При цьому друга напівчашка 34 фіксувальними гвинтами 36 рознімно з'єднана з першою напівчашкою 32. Відгвинчування фіксувальних гвинтів 36 дозволяє просто виймати другу напівчашку 34, завдяки чому можна порівняно просто вийняти напрямну кулю 30, а разом з нею і встановлений у ній порожнистий вал 8. Таким чином в разі потреби технічного обслуговування забезпечується порівняно просте виймання захватного пристрою 1. Для забезпечення особливо великої робочої зони з точки зору позиціювання захвату 14 у обробному приміщенні 2 порожнистий вал 8 встановлений у напрямній кулі 30 з можливістю переміщення у поздовжньому напрямку. З метою дотримання особливо високих вимог безпеки з точки зору герметичності обробного приміщення 2 на частині 38 порожнистого валу 8, яка перебуває в обробному приміщенні 2, встановлена охоплююча вал 8 ущільнювальна пластина 40, яка через охоплюючий вал 8 сильфон 42 герметично зв'язана зі встановленою на перегородці 6 ущільнювальною пластиною 44 і через неї з перегородкою 6. Конструктивне виконання захвату 14 детальніше пояснюється на Фіг.2а і 2b. На Фіг.2а захват 14 зображений у відкритому положенні. Захват 14 містить корпус 50, в який введена виконана у вигляді тросика тяга 16. Власне функція захвату здійснюється певною кількістю захватних лап 52, які взаємодіють попарно подібно до кліщів. Кожна захватна лапа 52 пропущена крізь корпус 50 всередину і там з можливістю обертання встановлена на шарнірі 54. На розміщених всередині корпуса 50 вільних кінцях захватні лапи 52 зв'язані між собою важільним механізмом 56, до якого приєднана тяга 16. Важільний механізм 56 через зворотну пружину 58 зв'язаний з корпусом 50, завдяки чому забезпечується автоматичне повернення захватних лап 52 у зображене на Фіг.2а початкове положення. Подвійною стрілкою 60 показано, що важільний механізм 56 може бути тягою 16 проти дії зворотної пружини 58 переведений у стиснене положення лап 52 і зворотною пружиною 58 повернутий у початкове положення. Розведення важільного механізму 56 під дією тягового зусилля тяги 16 переводить захват 14 у робоче положення, як показано, наприклад, на Фіг.2b. При цьому розведення важільного механізму 56 зумовлює бічне переміщення розміщених всередині корпусу 50 кінців захватних лап 52. Завдяки встановленню захватних лап 52 на шарнірах 54, зовнішні кінці захватних лап 52 попарно рухаються назустріч один іншому у зображене на Фіг.2b закрите або захватне положення. При цьому - як показано на Фіг.2b - зворотна пружина 58 розтягується. Після знімання з тяги 16 тягового зусилля зворотне зусилля зворотної пружини 58 зумовлює автоматичне розведення зовнішніх кінців захватних лап 52. Захватний пристрій 1 особливо придатний для надійної обробки конструктивних елементів і компонентів ядерних установок, що потребують утилізації. Приклад такої можливості застосування захватного пристрою 1 ілюструє Фіг.3. Як про ядерну установку 70 згідно з Фіг.3 в даному прикладі виконання йдеться про виробничу будівлю для спресовування радіоактивно заражених фільтрувальних патронів, що підлягають утилізації. Для цього ядерна установка 70 як обробне приміщення 2 містить склад попереднього зберігання, відокремлений від сусіднього операторського приміщення 4 перегородкою 6. В перегородці 6 встановлена певна кількість захватних пристроїв 1. Обробне приміщення 2 в даному прикладі виконання згідно з Фіг.3 призначене для обробки фільтрувальних патронів. Фільтрувальні патрони подають у контейнерах 72. Для обробки розміщених в ньому фільтрувальних патронів кожен контейнер 72 спочатку за допомогою настінного поворотного крану 74 переміщують в робочу зону захватних пристроїв 1. За допомогою захватних пристроїв 1 і в даному прикладі виконання детальніше не зображеного пневматичного гвинтоверта вигвинчують гвинти кришки оброблюваного контейнера 72, а потім кришку контейнера знімають за допомогою складського крана. Після цього контейнер 72 за допомогою настінного поворотного крану 74 і спеціального захвату для контейнерів без кришки поміщають у перекидальний пристрій 76. У ньому контейнер 72 відхиляють або перекидають таким чином, що розміщені в ньому фільтрувальні патрони 78 можуть бути вийняті за допомогою захватного пристрою 1. Потім вийняті фільтрувальні патрони 78 за допомогою захватного пристрою 1 скидають у камеру попереднього зберігання. Через неї фільтрувальні патрони 78 подають на гідравлічний прес. Отриманий таким чином спресований блок переміщують у відповідним чином підготовлений, бетонований складський контейнер. При цьому спресований блок вкладають у відповідну тр убу за допомогою захватного пристрою. На заповнений спресованими блоками попередньо бетонований контейнер встановлюють кришку. Її пригвинчують за допомогою захватного пристрою 1 і пневматичного гвинтоверта. Після цього накритий кришкою контейнер за допомогою складського контейнерного крана готують для подальшого транспортування до схови ща для контейнерів. Таким чином, захватні пристрої 1 у прикладі виконання згідно з Фіг.3 специфічно використовують для таких видів робіт, при яких необхідне лише порівняно просте маніпулювання компонентами чи матеріалами. Саме завдяки цьому навіть при простій конструкції захватного пристрою 1 може бути досягнута висока надійність і безпека праці при виконанні цих видів робіт. В альтернативній формі виконання ядерної установки 70’ згідно з Фіг.4 перегородка 6 з метою економії матеріалів виконана багато компонентною. При цьому перегородка 6 як перший компонент містить нерухомий стінний елемент 80, в якому навпроти зони обробки контейнерів 72 виконані порівняно великі наскрізні отвори 82. Як інший компонент перегородка 6 містить взаємодіючий зі стінним елементом 80, встановлений з можливістю переміщення у поздовжньому напрямку стінний елемент 84. Стінний елемент 84 у свою чергу складається із робочого елемента 86, в якому встановлені захватні пристрої 1. З метою забезпечення для обслуговуючого персоналу можливості спостереження за виконанням операцій в ході обробки розміщених в обробному приміщенні 2 матеріалів чи компонентів робочий елемент 86 виготовлений із прозорого, здатного поглинати випромінювання матеріалу, такого як свинцеве скло. Робочий елемент 86 оточений непрозорим, наприклад, виготовленим із сталі стінним елементом 88. Завдяки можливості переміщення стінного елемента 84 встановлені у робочому елементі 86 захватні пристрої 1 можуть бути використані як на першій технологічній позиції, зображеній на Фіг.4а, так і на другій технологічній позиції, зображеній на Фіг.4b. Завдяки цій конструкції для задовільного обслуговування обох технологічних позицій необхідне лише переміщення одного єдиного робочого елемента 86, виготовленого із порівняно дорогого матеріалу, яким є свинцеве скло. При цьому інший, не використовуваний отвір 82 у стінному елементі 80 належним чином перекритий стінним елементом 88. Для уможливлення особливо простого переміщення стінного елемента 84 у поздовжньому напрямку його товщину вибирають такою, що рукоятки захватних пристроїв 1 у повністю висун утому в поздовжньому напрямку положенні можуть бути повністю прийняті стінним елементом 84. Одначе альтернативно стінний елемент 84 може бути виконаний також порівняно тонкостінним, з товщиною, що відповідає товщині перегородки згідно з Фіг.3. В цьому разі передбачено, що для переміщення стінного елемента 84 у його поздовжньому напрямку спочатку заважаючі елементи захватних пристроїв 1 демонтують і після переміщення стінного елемента 84 монтують знову.
ДивитисяДодаткова інформація
Назва патенту англійськоюGripping device
Автори англійськоюHlikha Viktor
Назва патенту російськоюЗахватное устройство
Автори російськоюГлиха Виктор
МПК / Мітки
МПК: G21C 7/00, G21C 19/00, G21C 19/02, B25J 1/00
Код посилання
<a href="https://ua.patents.su/6-72799-zakhvatnijj-pristrijj.html" target="_blank" rel="follow" title="База патентів України">Захватний пристрій</a>
Захватний пристрій

Номер патенту: 35952
Опубліковано: 16.04.2001
Автори: Пасічник Віталій Анатолійович, Давигора Вадим Миколайович, Сімута Роман Русланович
МПК: B25J 15/00
Формула / Реферат:
1. Захватний пристрій, що містить корпус, виконаний з можливістю кріплення до складального інструмента, захватно-базуючий механізм, механізм подачі деталей, що складаються, і інструмент для загвинчування деталей, який відрізняється тим, що в корпусі виконано отвір з багатозахідною нарізкою, a захватно-базуючий механізм виконаний із гвинтових дротиків, розміщених в канавках багатозахідної нарізки з можливістю обмеженого переміщення в площині,...
Захватний пристрій

Номер патенту: 66614
Опубліковано: 17.05.2004
Автори: Зарудний Віталій Семенович, Яровий Євген Андрійович, Салєєва Антоніна Денисівна, Цимбал Лариса Леонідівна
МПК: A61F 2/54
Формула / Реферат:
Захватний пристрій, що містить рухому і нерухому бранші, встановлені на одній осі, енергонакопичувач у вигляді пружини схвата та тягу розкриття, з'єднану з рухомою браншею, який відрізняється тим, що бранші пристрою виконані прямокутно-овальними в одній площині і з Т-подібними кінцями в площині, перпендикулярній до першої, і виступами, виступаючими за Т-подібні бранші: на нерухомій бранші - за обидва боки, на рухомій - лише назовні, виступи...
Пенетраційний захватний пристрій

Номер патенту: 59648
Опубліковано: 15.09.2003
Автори: Керебко Тарас Станіславович, Романець Тарас Петрович, Драпак Георгій Мефодійович, Онофрійчук Володимир Іванович
МПК: B65H 3/22
Мітки: захватний, пенетраційний, пристрій
Формула / Реферат:
1. Пенетраційний захватний пристрій, що містить встановлений у корпусі поворотний елемент з прикріпленою до нього вигнутою голкою, встановленою з можливістю виходу крізь прорізь у корпусі, та привід поворотного елемента, що складається з штовхача та шатуна, який відрізняється тим, що шатун та поворотний елемент встановлені з можливістю фіксації пристрою у позиції захвату за рахунок "мертвого" положення механізму.2. Пристрій...
Захватний пристрій

Номер патенту: 2845
Опубліковано: 26.12.1994
Автори: Комащенко Віталій Іванович, Димченко Олег Васильович, Федоренко Павло Йосипович, Черконос Оксана Анатоліївна, Великий Михайло Ізраілевич, Черконос Анатолій Іванович
МПК: B66C 1/22
Формула / Реферат:
1. Захватное устройство, содержащее трос, концы которого связаны с подвеской для крюка подъемной машины, изогнутые от вертикальной оси симметрии захватные органы, связанные с ними и закрепленные на горизонтальных осях с возможностью перемещения по тросу ролики, отличающееся тем, что, с целью повышения надежности захвата груза с углублениями на боковых поверхностях, связь роликов с захватными органами выполнена в виде планок, расположенных...
Захватний пристрій для транспортування і кантування ланок рейкошпальної решітки
Номер патенту: 3798
Опубліковано: 27.12.1994
Автор: Лазоренко Микола Семенович
МПК: B66C 1/10
Мітки: пристрій, ланок, кантування, решітки, рейкошпальної, транспортування, захватний
Формула / Реферат:
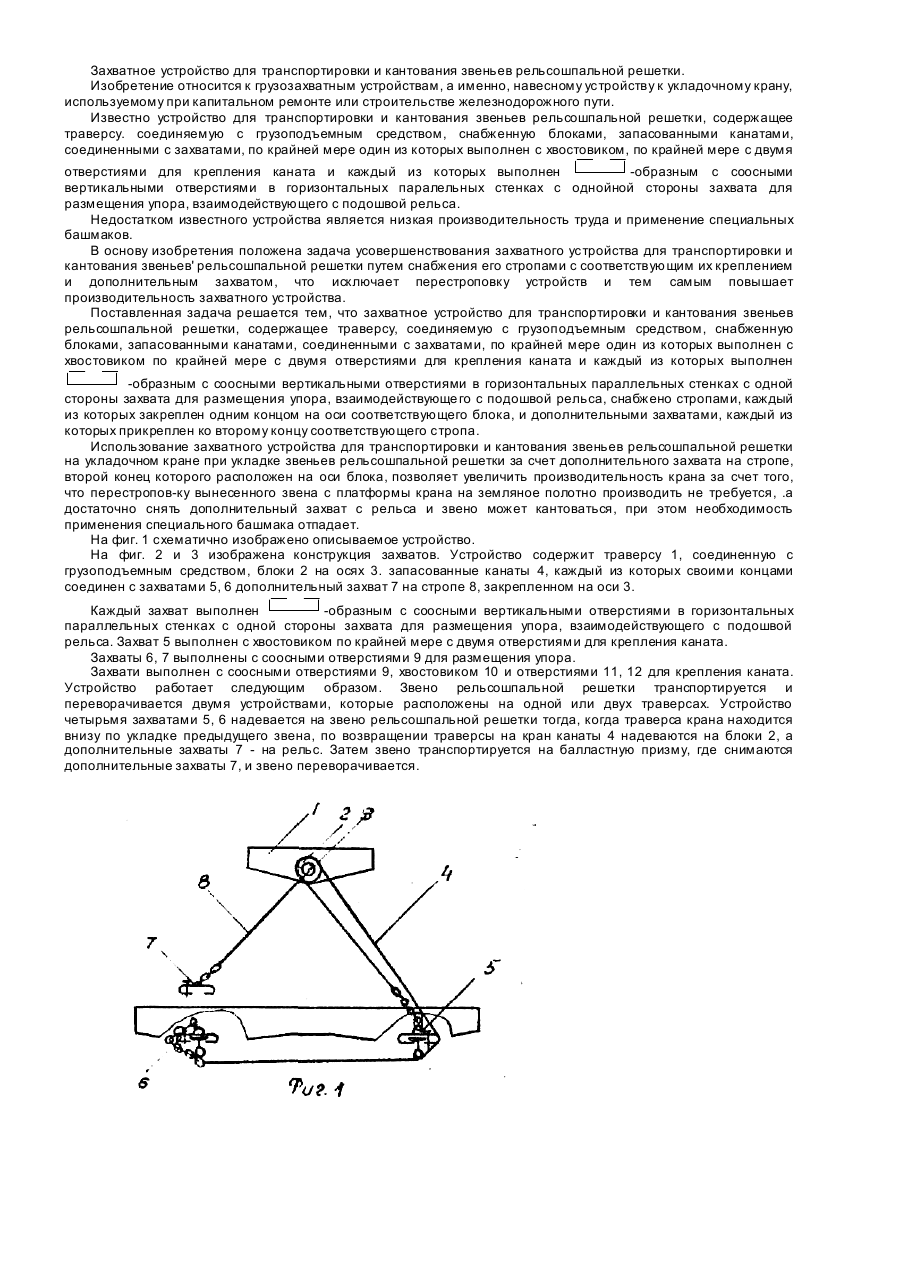
Захватное устройство для транспортировки и кантования звеньев рельсошпальной решетки, содержащее траверсу, соединяемую с грузоподъемным средством, снабженную блоками, запакованными канатами, соединенными с захватами, по крайней мере один из которых выполнен с хвостовиком по крайней мере с двумя отверстиями для крепления каната и каждый из которых выполнен -образным с...
Попередній патент: Флакон для лікарських препаратів
Наступний патент: Спосіб магнітної обробки рідини і пристрій для його здійснення
Випадковий патент: Склад морозива ароматичного або льоду