Маніпулятор для просторових мікропереміщень
Формула / Реферат
Маніпулятор для просторових мікропереміщень, який включає нерухомий корпус та рухому платформу, яка має шість ступенів вільності і привод з числом механізмів лінійного переміщення рівним числу ступенів вільності платформи, при цьому механізми лінійного переміщення з'єднують три точки корпуса, які є вершинами рівностороннього трикутника із трьома точками платформи, які є вершинами подібного трикутника, повернутого відносно трикутника корпуса на кут 60°, який відрізняється тим, що механізми лінійного переміщення виконано у вигляді плоских пружин, площини яких відповідають граням октаедра, вершинами якого є три точки корпуса та три точки платформи, які з'єднуються механізмами лінійних переміщень, при цьому на корпусі та платформі встановлені торсіони хрестоподібного перетину, що з'єднують їх із точками закріплення механізмів лінійних переміщень, а плоскі пружини у місцях їх з'єднання із торсіонами мають пружні шарніри у вигляді фасонних балок, що допускають обмежені переміщення плоских пружин у їх власних площинах, при цьому плоскі пружини деформуються із своєї площини сильфонними приводами, розміщеними на корпусі маніпулятора, причому стиснене робоче середовище в порожнини сильфонів підводиться від мехатронної системи керування, яка регулює тиск в кожному із сильфонів відповідно заданому закону просторового мікропереміщення платформи.
Текст
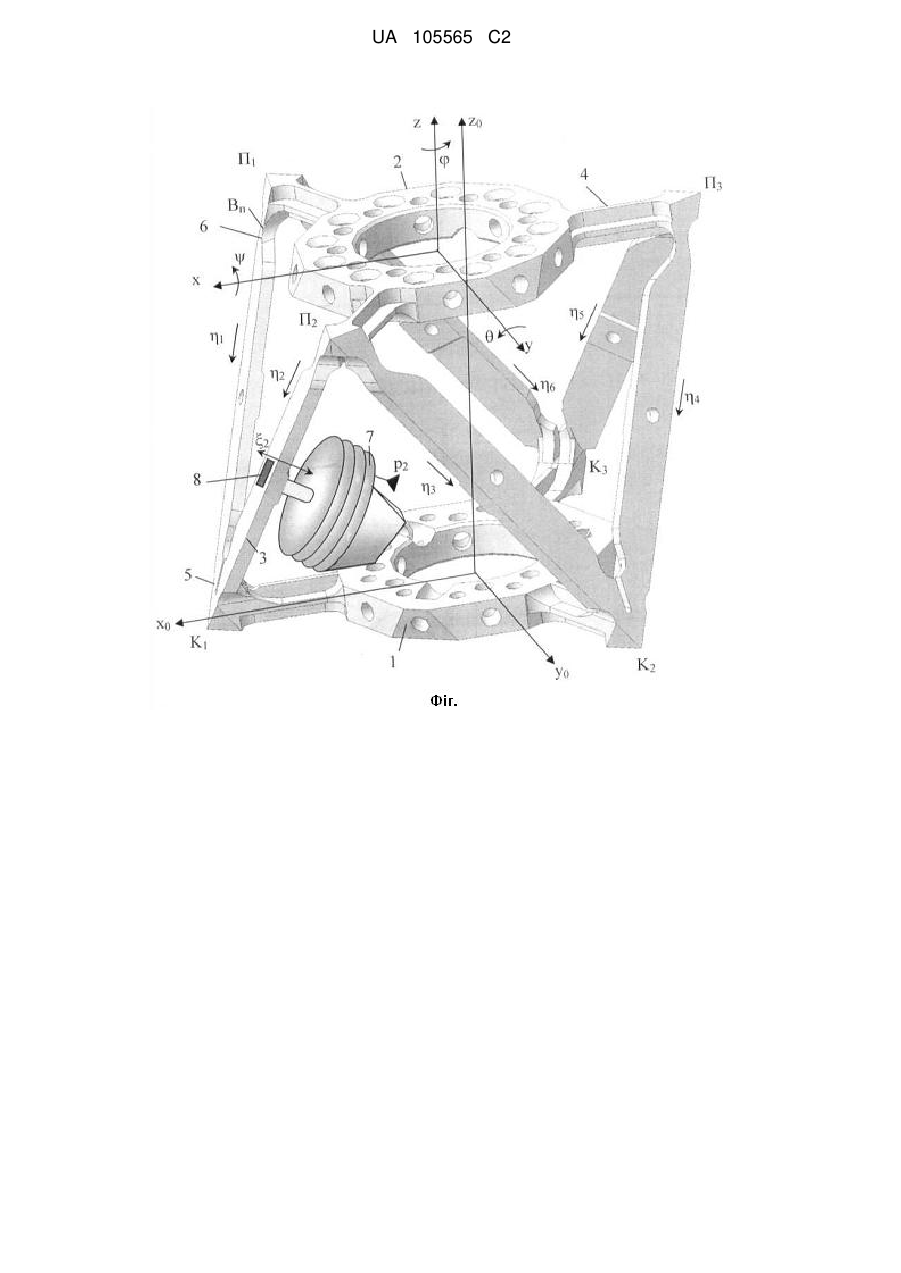
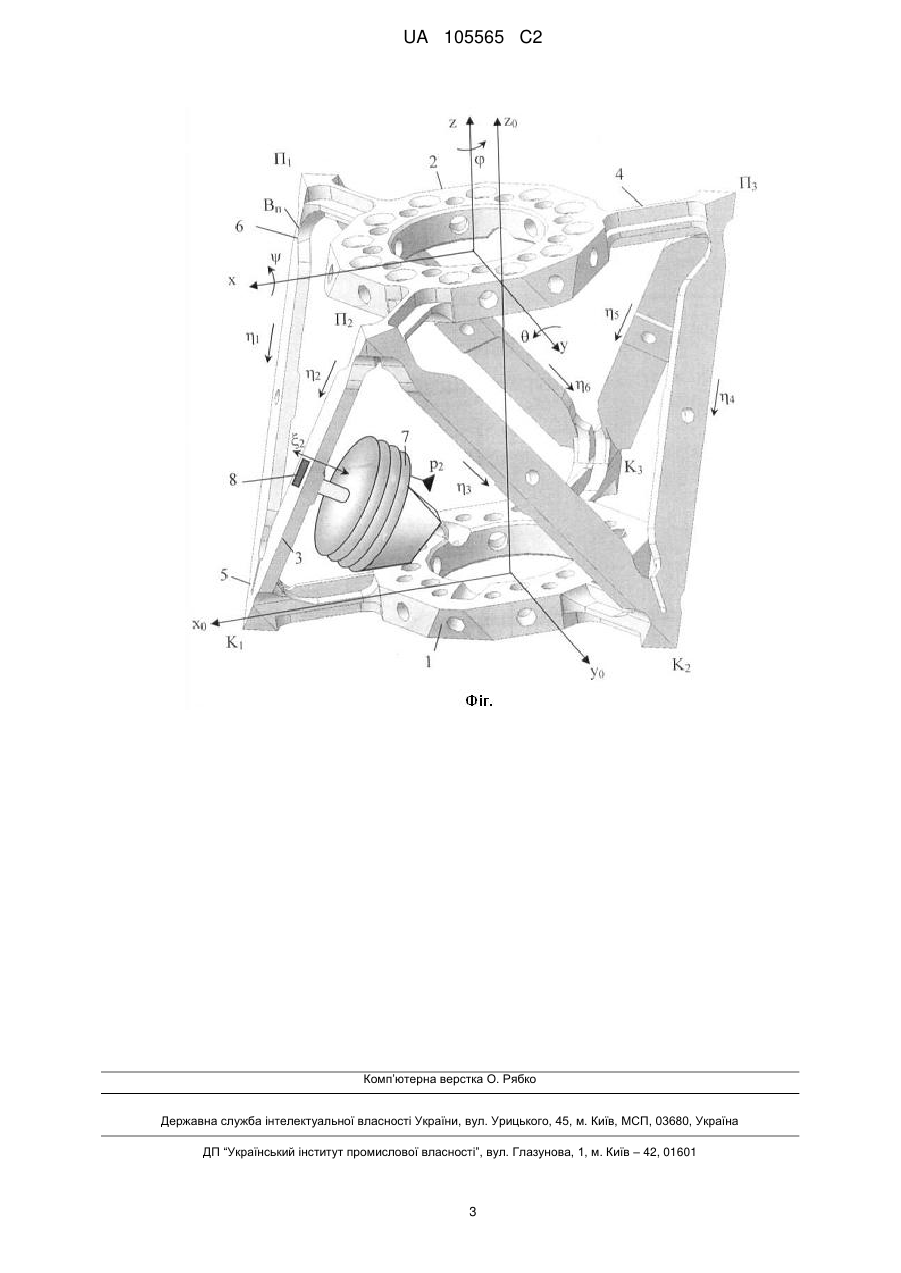
Реферат: Винахід належить до загального машинобудування і може бути використаний при розробці технологічного обладнання на основі механізмів паралельної кінематики. В маніпуляторі для просторових мікропереміщень який включає нерухомий корпус та рухому платформу, яка має шість ступенів вільності і привод з числом механізмів лінійного переміщення рівним числу ступенів вільності платформи, при цьому механізми лінійного переміщення з'єднують три точки корпуса, які є вершинами рівностороннього трикутника із трьома точками платформи, які є вершинами подібного трикутника, повернутого відносно трикутника корпуса на кут 60°, новим є те, що механізми лінійного переміщення виконано у вигляді плоских пружин, площини яких відповідають граням октаедра, вершинами якого є три точки корпуса та три точки платформи, які з'єднуються механізмами лінійних переміщень, при цьому на корпусі та платформі встановлені торсіони хрестоподібного перетину, що з'єднують їх із точками закріплення механізмів лінійних переміщень, а плоскі пружини у місцях їх з'єднання із торсіонами мають пружні шарніри у вигляді фасонних балок, що допускають обмежені переміщення плоских пружин у їх власних площинах, при цьому плоскі пружини деформуються із своєї площини сильфонними приводами, розміщеними на корпусі маніпулятора, причому стиснене робоче середовище в порожнини сильфонів підводиться від спеціальної мехатронної системи керування, яка регулює тиск в кожному із сильфонів відповідно заданому закону просторового мікропереміщення платформи, при цьому деформації плоских пружин вимірюються і використовуються для корекції законів зміни тиску в сильфонах. Винахід дозволяє підвищити точність маніпулятора. UA 105565 C2 (12) UA 105565 C2 UA 105565 C2 5 10 15 20 25 30 35 40 45 50 55 60 Винахід належить до загального машинобудування і може бути використаний при створенні багатокоординатного технологічного обладнання, зокрема пристроїв маніпулювання, вимірювальних машин, промислових роботів, металообробного обладнання. Відомі просторові механізми з приводами, призначені для переміщення виконавчого органа (платформи) в просторі [1]. Вони включають нерухомий корпус та рухому платформу, з'єднані між собою приводами лінійних переміщень. Недоліком даних механізмів є незадовільні статичні і динамічні характеристики, обумовлені наявністю особливих положень (критичних точок) при певному розташуванні приводів відносно корпуса і платформи. За найближчий аналог прийнято маніпулятор [2], який включає корпус та платформу, на якій знаходиться механічна рука, схват якої має шість ступенів вільності і привод з числом механізмів лінійного переміщення, наприклад силовими циліндрами, рівним числу ступенів вільності платформи, при цьому механізми лінійного переміщення з'єднують три точки корпуса, які є вершинами рівностороннього трикутника, із трьома точками платформи, які є вершинами подібного трикутника, повернутого відносно трикутника корпуса на кут 60°. Недоліком найближчого аналогу є низька точність позиціювання платформи, обумовлена наявністю сил тертя в шарнірах просторового механізму, а також люфтами і зазорами в шарнірах. В основу запропонованого рішення поставлена задача підвищення точності маніпулятора для просторових мікропереміщень конструктивними методами за рахунок виключення шарнірів, а відповідно сил тертя, люфтів та зазорів у рухомих з'єднаннях маніпулятора. Поставлена задача вирішується тим, що маніпулятор для просторових мікропереміщень, який включає нерухомий корпус та рухому платформу, яка має шість ступенів вільності і привод з числом механізмів лінійного переміщення рівним числу ступенів вільності платформи, при цьому механізми лінійного переміщення з'єднують три точки корпуса, які є вершинами рівностороннього трикутника із трьома точками платформи, які є вершинами подібного трикутника, повернутого відносно трикутника корпуса на кут 60°, згідно запропонованого рішення новим є те, що механізми лінійного переміщення виконано у вигляді плоских пружин, площини яких відповідають граням октаедра, вершинами якого є три точки корпуса та три точки платформи, які з'єднуються механізмами лінійних переміщень, при цьому на корпусі та платформі встановлені торсіони хрестоподібного перетину, що з'єднують їх із точками закріплення механізмів лінійних переміщень, а плоскі пружини у місцях їх з'єднання із торсіонами мають пружні шарніри у вигляді фасонних балок, що допускають обмежені переміщення плоских пружин у їх власних площинах, при цьому плоскі пружини деформуються із своєї площини сильфонними приводами, розміщеними на корпусі маніпулятора, причому стиснене робоче середовище в порожнини сильфонів підводиться від спеціальної мехатронної системи керування, яка регулює тиск в кожному із сильфонів відповідно заданому закону просторового мікропереміщення платформи, при цьому деформації плоских пружин вимірюються і використовуються для корекції законів зміни тиску в сильфонах. Таким чином, запропоноване технічне рішення є новим у порівнянні з відомим і дозволяє підвищити точність маніпулятора для просторових мікропереміщень шляхом виключення шарнірів, а відповідно і сил тертя, люфтів і зазорів у рухомих з'єднаннях маніпулятора. Суть запропонованого технічного рішення пояснюється графічним зображенням його твердотільної моделі (креслення). Маніпулятор для просторових мікропереміщень (креслення) включає нерухомий корпус 1 та рухому платформу 2, що має шість ступенів вільності - три декартові координати поступального переміщення платформи х, у, z та три поперечно-кутові координати ψ, θ, φ, які характеризують поворот платформи навколо осей х, у, z відповідно. Платформа має привод з числом механізмів лінійного переміщення рівним числу ступенів вільності платформи. Приводи лінійного переміщення з'єднують три точки корпуса К1, К2, К3, які є вершинами рівностороннього трикутника із трьома точками П1, П2, П3 платформи, які є вершинами подібного трикутника, повернутого відносно трикутника основи на кут 60°. Механізми лінійного переміщення виконані у вигляді плоских пружин, 3 площини яких відповідають граням октаедра, вершинами якого є три точки корпуса К1, К2, К3 та три точки платформи П1, П2, П3, які з'єднуються приводами лінійних переміщень. При цьому на корпусі та платформі виконані торсіони 4 хрестоподібного перетину, що з'єднують їх із точками закріплення механізмів лінійних переміщень. Плоскі пружини у місцях їх з'єднання із торсіонами мають пружні шарніри у вигляді фасонних балок 5 і 6, що допускають обмежені переміщення плоских пружин у їх власних площинах. Плоскі пружини деформуються із своєї площини сильфон ними приводами 7, розміщеними на корпусі 1. Стиснене робоче середовище (рідина або газ) підводиться в порожнини сильфонів під тиском р 1 від спеціальної мехатронної системи керування (на рисунку не показана). Система керування регулює тиск в 1 UA 105565 C2 5 10 15 20 кожному із сильфонів, наприклад тиск р1 в сильфоні 7. Тиск регулюється відповідно заданому закону просторового мікропереміщення платформи. При цьому деформації плоских пружин вимірюються за допомогою спеціальних пристроїв, наприклад тензометричних пристроїв 8 і використовуються для системою керування для корекції законів зміни тиску в сильфоні. Маніпулятор для просторових мікропереміщень працює наступним чином. При зміні тиску р 1 в кожному із сильфонів 7, який регулюється системою керування, плоска пружина 3 деформується із своє площини в напрямку, показаному стрілкою ξ1. При деформації пружини змінюється її довжина, а відповідно і відстань між точками К1, П1, Зміна довжини всіх шести плоских пружин приводить до зміни просторового положення платформи 2. Платформа має шість ступенів вільності, тому в залежності від прогину всіх шести пружин відбувається переміщення центра платформи в напрямках х, у і z та зміна кутового положення платформи, що характеризується кутами ψ, θ, φ. Переміщення відбувається в межах пружних деформацій плоских пружин 3 торсіонів 4 та фасонних балок 5 і 6. Конструктивні параметри маніпулятора вибрані таким чином, що діапазон переміщень точок П1, П2, П3 платформи сягає 0,2…0,5мм, що достатньо для забезпечення необхідних діапазонів просторових мікропереміщень платформи. Джерела інформації: 1. Кузнецов Ю.Н., Дмитриев Д.О., Диневич Г.Ю. Компоновки станков с механизмами параллельной структуры - Херсон: 1111 Вишемирський В.С, 2009. - 456 с. 2. Манипулятор. А.с. № 558788, МПК В 25 J 1/02/ Данилевский В.Н. Заявл. 20.02.1976 - № 2326318/08. Опубл. 25.05.1977. Бюл. № 18. ФОРМУЛА ВИНАХОДУ 25 30 35 40 Маніпулятор для просторових мікропереміщень, який включає нерухомий корпус та рухому платформу, яка має шість ступенів вільності і привод з числом механізмів лінійного переміщення рівним числу ступенів вільності платформи, при цьому механізми лінійного переміщення з'єднують три точки корпуса, які є вершинами рівностороннього трикутника із трьома точками платформи, які є вершинами подібного трикутника, повернутого відносно трикутника корпуса на кут 60°, який відрізняється тим, що механізми лінійного переміщення виконано у вигляді плоских пружин, площини яких відповідають граням октаедра, вершинами якого є три точки корпуса та три точки платформи, які з'єднуються механізмами лінійних переміщень, при цьому на корпусі та платформі встановлені торсіони хрестоподібного перетину, що з'єднують їх із точками закріплення механізмів лінійних переміщень, а плоскі пружини у місцях їх з'єднання із торсіонами мають пружні шарніри у вигляді фасонних балок, що допускають обмежені переміщення плоских пружин у їх власних площинах, при цьому плоскі пружини деформуються із своєї площини сильфонними приводами, розміщеними на корпусі маніпулятора, причому стиснене робоче середовище в порожнини сильфонів підводиться від мехатронної системи керування, яка регулює тиск в кожному із сильфонів відповідно заданому закону просторового мікропереміщення платформи. 2 UA 105565 C2 Комп’ютерна верстка О. Рябко Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
Автори англійськоюStrutynskyi Serhii Vasyliovych
Автори російськоюСтрутинский Сергей Васильевич
МПК / Мітки
МПК: B25J 11/00
Мітки: маніпулятор, просторових, мікропереміщень
Код посилання
<a href="https://ua.patents.su/5-105565-manipulyator-dlya-prostorovikh-mikroperemishhen.html" target="_blank" rel="follow" title="База патентів України">Маніпулятор для просторових мікропереміщень</a>
Спосіб контролю лінійних мікропереміщень прецизійних направляючих
Номер патенту: 31536
Опубліковано: 10.04.2008
Автори: Бєлова Альона Вікторівна, Антонюк Віктор Степанович, Петренко Сергій Федорович
МПК: G01B 11/00
Мітки: спосіб, лінійних, направляючих, мікропереміщень, контролю, прецизійних
Формула / Реферат:
1. Спосіб контролю лінійних мікропереміщень прецизійних направляючих, що включає приймання інформації від об'єкта, що переміщується, та визначення величини лінійних переміщень на підставі її аналізу, який відрізняється тим, що переміщення об'єкта здійснюють за допомогою п'єзоелектричного двигуна, зв'язаного з об'єктом, що переміщується, візуальну інформацію про фактичне лінійне переміщення об'єкта перетворюють у відеозображення, попередньо...
Маніпулятор для складання візка вантажного вагона
Номер патенту: 20017
Опубліковано: 15.01.2007
Автори: Панасенко Віталій Якович, Клименко Ірина Володимирівна
МПК: B65G 57/00, B60S 5/00, B25B 27/14
Мітки: маніпулятор, вантажного, візка, складання, вагона
Формула / Реферат:
Маніпулятор для складання візка вантажного вагона, що має змонтовані на рухомій платформі механізми захвату та переміщення фрикційних клинів, механізм переміщення пружин ресорного комплекту візка, причому вказаний механізм включає в себе розміщену на корпусі площадку, зв'язану з приводом її зворотно-поступального переміщення в зону розташування пружин, положення яких фіксується приливками у формі зрізаного конуса, а по висоті приливки вищі,...
Маніпулятор
Номер патенту: 59708
Опубліковано: 25.05.2011
Автор: Самойленко Олексій Васильович
Мітки: маніпулятор
Формула / Реферат:
Маніпулятор, що містить послідовно з'єднані механізми повороту, нахилу та лінійного переміщення робочого органа, який відрізняється тим, що механізм нахилу виконано на основі двокоромислового чотириланкового шарнірного механізму, коромисла якого мають рівну довжину і в нейтральному положенні спрямовані до геометричного центру маніпулятора, а механізм лінійного переміщення виконано у вигляді щонайменше двох шарнірних паралелограмів,...
Пристрій контролю лінійних мікропереміщень прецизійних лінійних напрямних
Номер патенту: 32248
Опубліковано: 12.05.2008
Автори: Петренко Сергій Федорович, Бєлова Альона Вікторівна, Антонюк Віктор Степанович
МПК: G01B 11/00
Мітки: контролю, мікропереміщень, лінійних, прецизійних, пристрій, напрямних
Формула / Реферат:
Пристрій контролю лінійних мікропереміщень прецизійних лінійних напрямних, що містить формувач світлового потоку, приймач, комп'ютер, оптичну систему, вхід якої зв'язаний з виходом формувача світлового потоку, а вихід з приймачем, який відрізняється тим, що оптична система виконана у вигляді мікроскопа, який спряжено з приймачем, що являє собою телевізійну камеру, вихід якої з'єднаний з комп'ютером, який з'єднаний із входом додатково...
Маніпулятор
Номер патенту: 84692
Опубліковано: 25.10.2013
Автори: Драпак Георгій Мефодійович, Онофрійчук Володимир Іванович
МПК: B25J 11/00
Мітки: маніпулятор
Формула / Реферат:
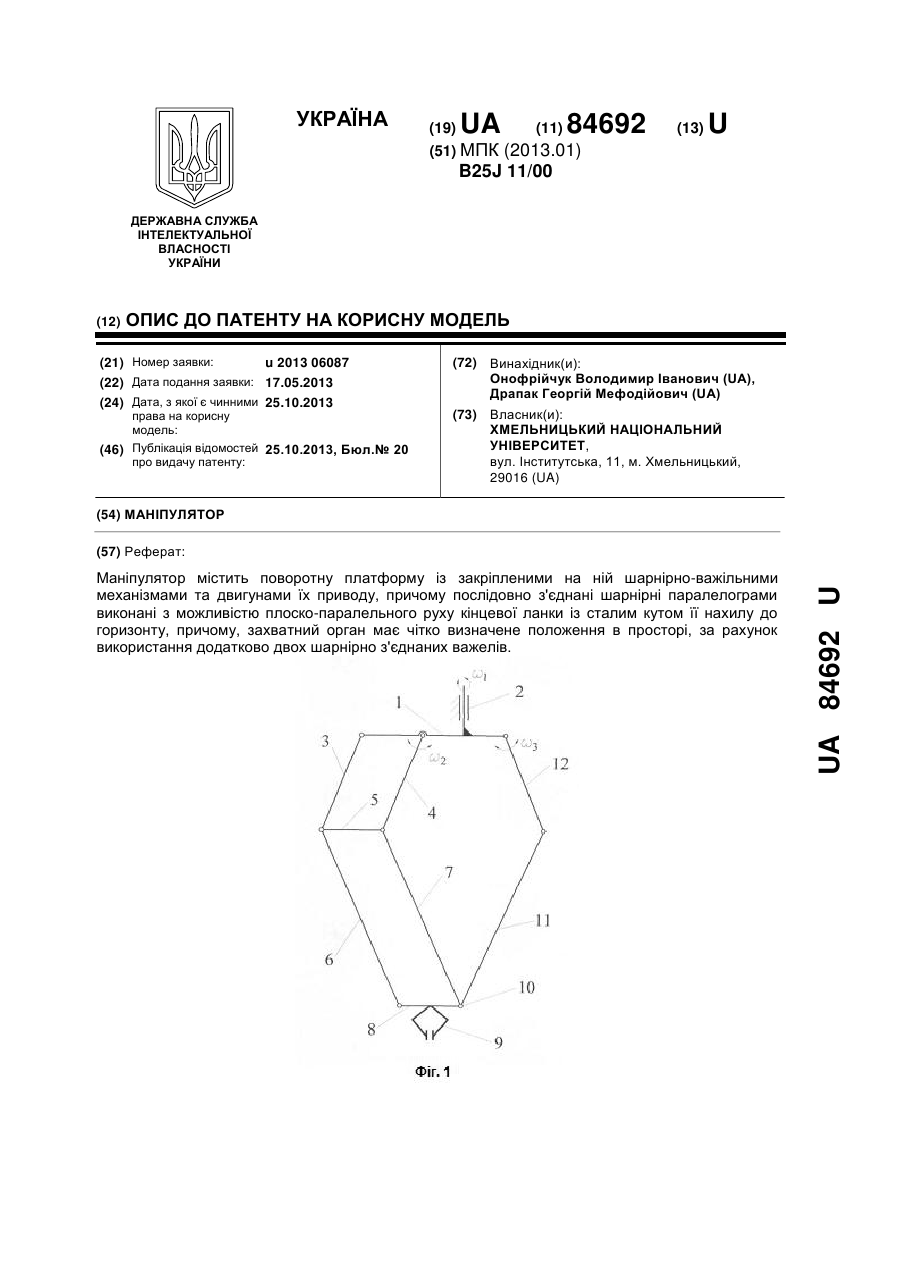
Маніпулятор, що містить поворотну платформу із закріпленими на ній шарнірно-важільними механізмами та двигунами їх приводу, який відрізняється тим, що послідовно з'єднані шарнірні паралелограми виконані з можливістю плоско-паралельного руху кінцевої ланки із сталим кутом її нахилу до горизонту, причому, захватний орган має чітко визначене положення в просторі, за рахунок використання додатково двох шарнірно з'єднаних важелів.
Попередній патент: Кабельний кран
Наступний патент: Приєднувальна коробка для волоконно-оптичного кабелю
Випадковий патент: Спосіб оплати за проїзд в наземному громадському транспорті за допомогою електронної картки