Маніпулятор
Номер патенту: 84692
Опубліковано: 25.10.2013
Автори: Онофрійчук Володимир Іванович, Драпак Георгій Мефодійович

Формула / Реферат
Маніпулятор, що містить поворотну платформу із закріпленими на ній шарнірно-важільними механізмами та двигунами їх приводу, який відрізняється тим, що послідовно з'єднані шарнірні паралелограми виконані з можливістю плоско-паралельного руху кінцевої ланки із сталим кутом її нахилу до горизонту, причому, захватний орган має чітко визначене положення в просторі, за рахунок використання додатково двох шарнірно з'єднаних важелів.
Текст
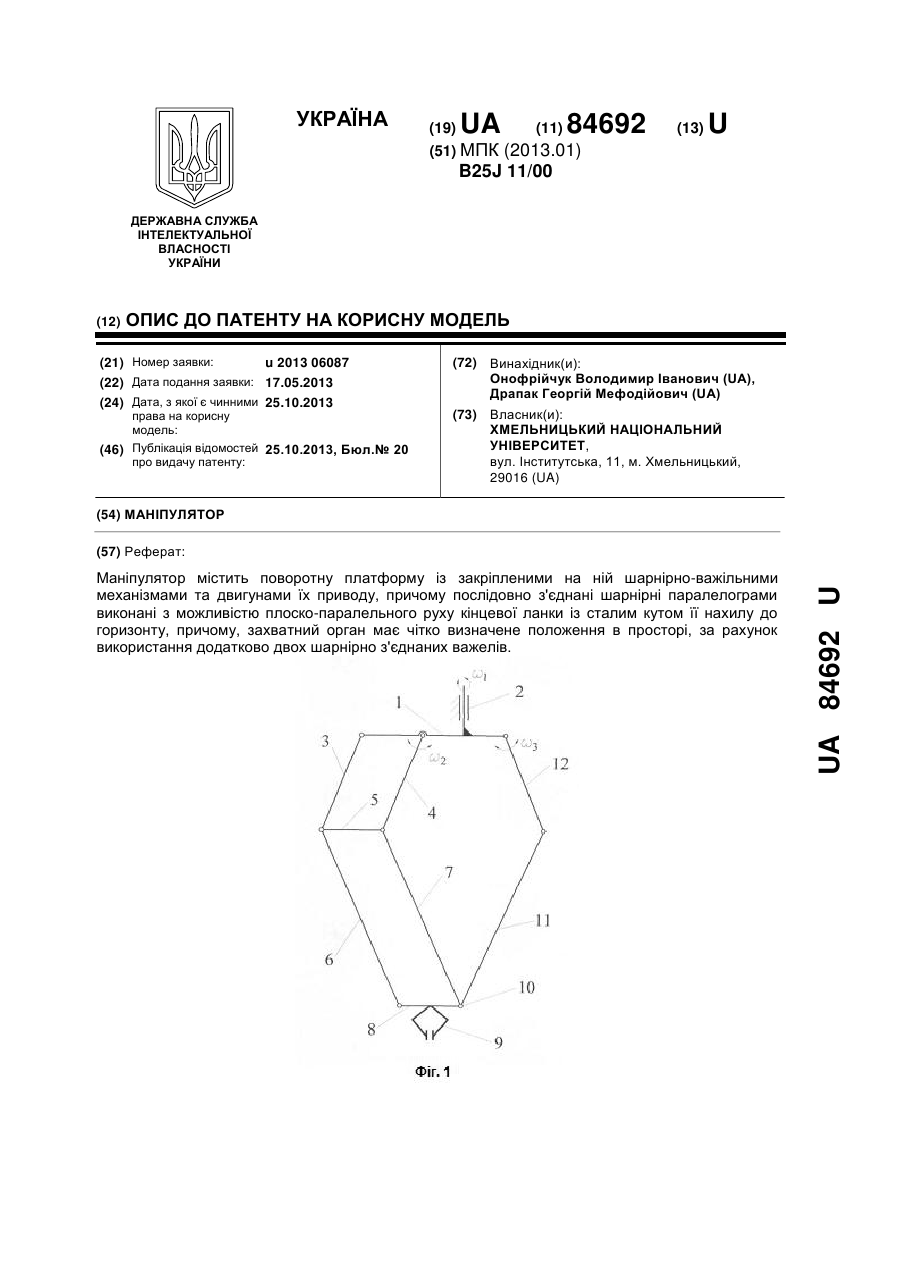
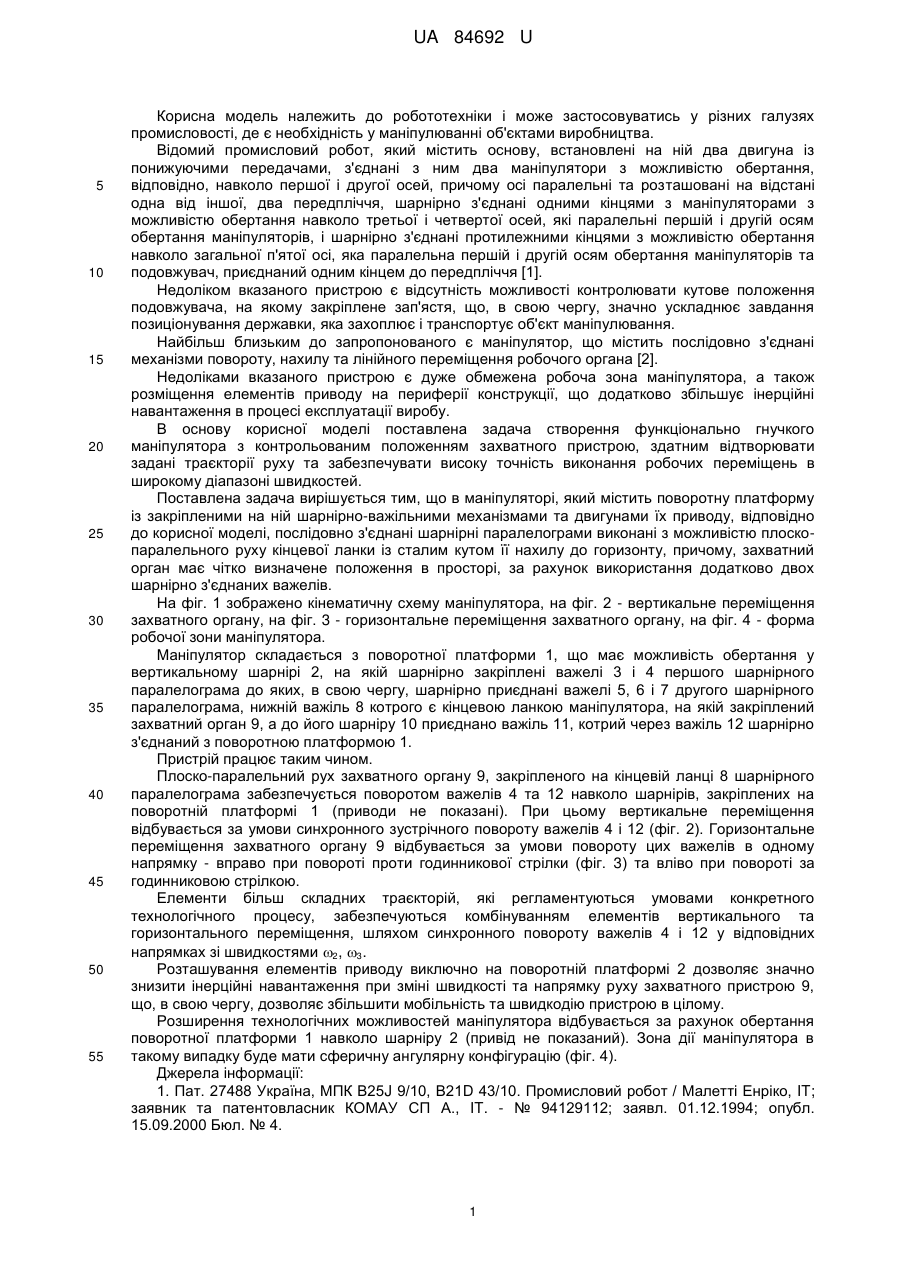
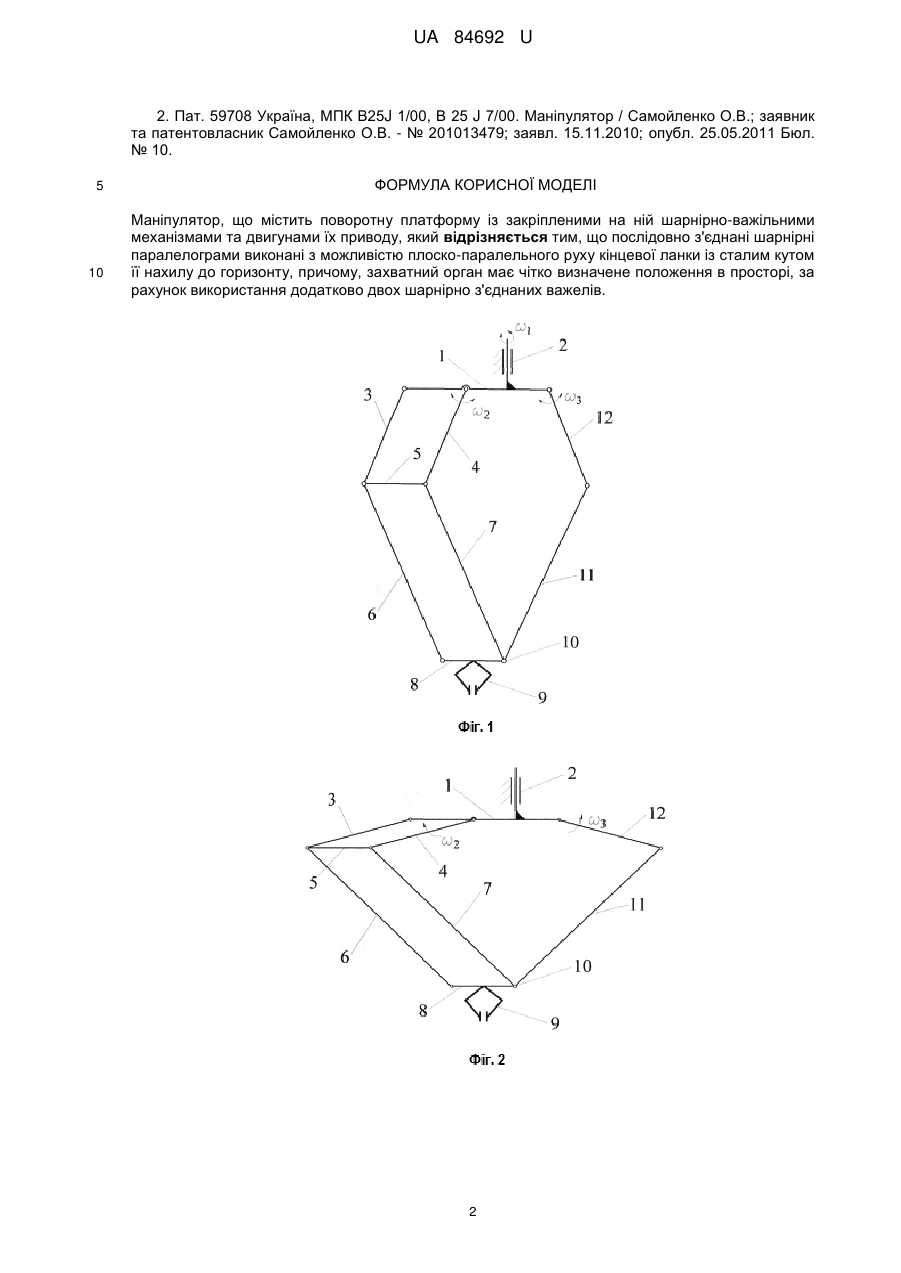
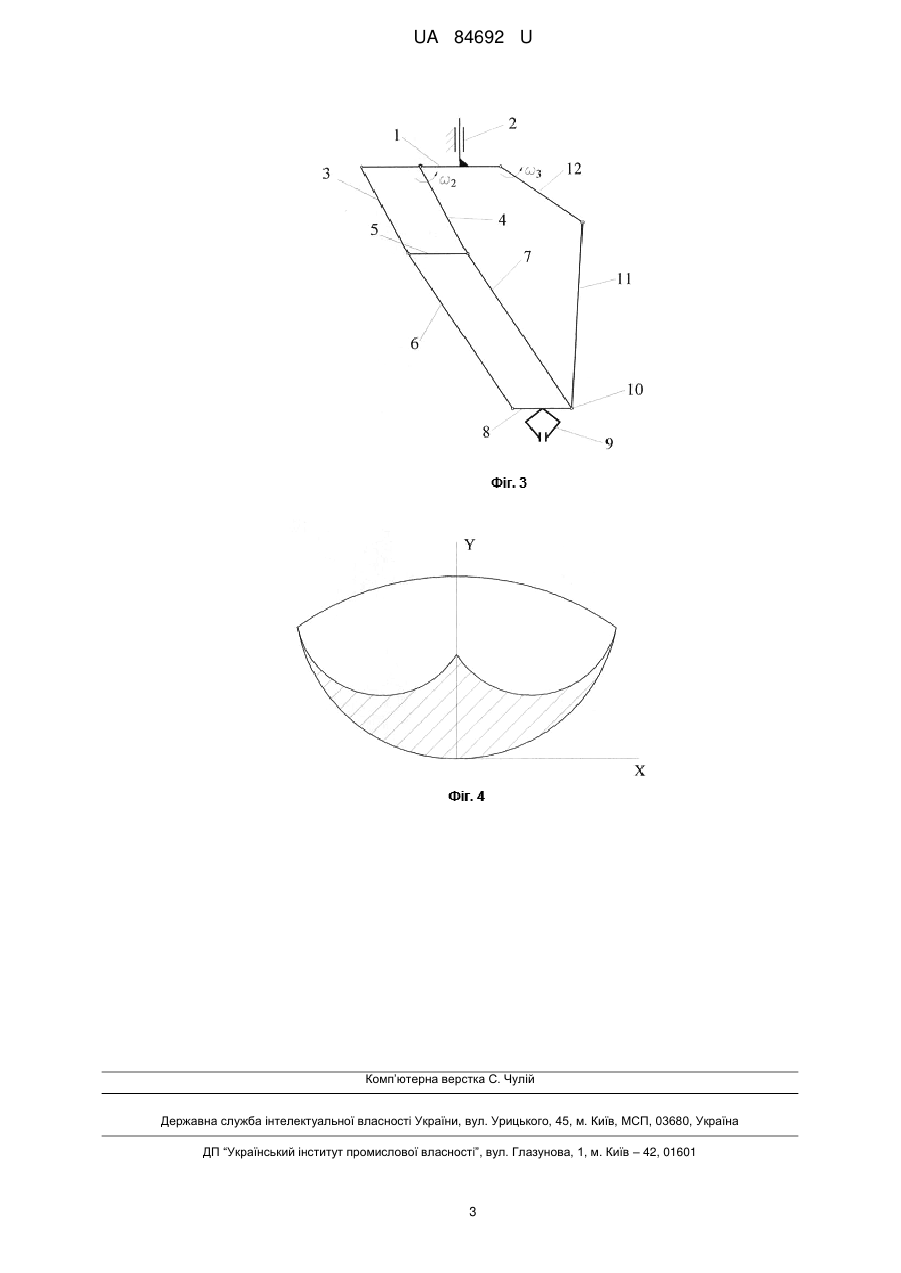
Реферат: UA 84692 U UA 84692 U 5 10 15 20 25 30 35 40 45 50 55 Корисна модель належить до робототехніки і може застосовуватись у різних галузях промисловості, де є необхідність у маніпулюванні об'єктами виробництва. Відомий промисловий робот, який містить основу, встановлені на ній два двигуна із понижуючими передачами, з'єднані з ним два маніпулятори з можливістю обертання, відповідно, навколо першої і другої осей, причому осі паралельні та розташовані на відстані одна від іншої, два передпліччя, шарнірно з'єднані одними кінцями з маніпуляторами з можливістю обертання навколо третьої і четвертої осей, які паралельні першій і другій осям обертання маніпуляторів, і шарнірно з'єднані протилежними кінцями з можливістю обертання навколо загальної п'ятої осі, яка паралельна першій і другій осям обертання маніпуляторів та подовжувач, приєднаний одним кінцем до передпліччя [1]. Недоліком вказаного пристрою є відсутність можливості контролювати кутове положення подовжувача, на якому закріплене зап'ястя, що, в свою чергу, значно ускладнює завдання позиціонування державки, яка захоплює і транспортує об'єкт маніпулювання. Найбільш близьким до запропонованого є маніпулятор, що містить послідовно з'єднані механізми повороту, нахилу та лінійного переміщення робочого органа [2]. Недоліками вказаного пристрою є дуже обмежена робоча зона маніпулятора, а також розміщення елементів приводу на периферії конструкції, що додатково збільшує інерційні навантаження в процесі експлуатації виробу. В основу корисної моделі поставлена задача створення функціонально гнучкого маніпулятора з контрольованим положенням захватного пристрою, здатним відтворювати задані траєкторії руху та забезпечувати високу точність виконання робочих переміщень в широкому діапазоні швидкостей. Поставлена задача вирішується тим, що в маніпуляторі, який містить поворотну платформу із закріпленими на ній шарнірно-важільними механізмами та двигунами їх приводу, відповідно до корисної моделі, послідовно з'єднані шарнірні паралелограми виконані з можливістю плоскопаралельного руху кінцевої ланки із сталим кутом її нахилу до горизонту, причому, захватний орган має чітко визначене положення в просторі, за рахунок використання додатково двох шарнірно з'єднаних важелів. На фіг. 1 зображено кінематичну схему маніпулятора, на фіг. 2 - вертикальне переміщення захватного органу, на фіг. 3 - горизонтальне переміщення захватного органу, на фіг. 4 - форма робочої зони маніпулятора. Маніпулятор складається з поворотної платформи 1, що має можливість обертання у вертикальному шарнірі 2, на якій шарнірно закріплені важелі 3 і 4 першого шарнірного паралелограма до яких, в свою чергу, шарнірно приєднані важелі 5, 6 і 7 другого шарнірного паралелограма, нижній важіль 8 котрого є кінцевою ланкою маніпулятора, на якій закріплений захватний орган 9, а до його шарніру 10 приєднано важіль 11, котрий через важіль 12 шарнірно з'єднаний з поворотною платформою 1. Пристрій працює таким чином. Плоско-паралельний рух захватного органу 9, закріпленого на кінцевій ланці 8 шарнірного паралелограма забезпечується поворотом важелів 4 та 12 навколо шарнірів, закріплених на поворотній платформі 1 (приводи не показані). При цьому вертикальне переміщення відбувається за умови синхронного зустрічного повороту важелів 4 і 12 (фіг. 2). Горизонтальне переміщення захватного органу 9 відбувається за умови повороту цих важелів в одному напрямку - вправо при повороті проти годинникової стрілки (фіг. 3) та вліво при повороті за годинниковою стрілкою. Елементи більш складних траєкторій, які регламентуються умовами конкретного технологічного процесу, забезпечуються комбінуванням елементів вертикального та горизонтального переміщення, шляхом синхронного повороту важелів 4 і 12 у відповідних напрямках зі швидкостями 2, 3. Розташування елементів приводу виключно на поворотній платформі 2 дозволяє значно знизити інерційні навантаження при зміні швидкості та напрямку руху захватного пристрою 9, що, в свою чергу, дозволяє збільшити мобільність та швидкодію пристрою в цілому. Розширення технологічних можливостей маніпулятора відбувається за рахунок обертання поворотної платформи 1 навколо шарніру 2 (привід не показаний). Зона дії маніпулятора в такому випадку буде мати сферичну ангулярну конфігурацію (фіг. 4). Джерела інформації: 1. Пат. 27488 Україна, МПК В25J 9/10, В21D 43/10. Промисловий робот / Малетті Енріко, IT; заявник та патентовласник КОМАУ СП А., IT. - № 94129112; заявл. 01.12.1994; опубл. 15.09.2000 Бюл. № 4. 1 UA 84692 U 2. Пат. 59708 Україна, МПК В25J 1/00, В 25 J 7/00. Маніпулятор / Самойленко О.В.; заявник та патентовласник Самойленко О.В. - № 201013479; заявл. 15.11.2010; опубл. 25.05.2011 Бюл. № 10. 5 10 ФОРМУЛА КОРИСНОЇ МОДЕЛІ Маніпулятор, що містить поворотну платформу із закріпленими на ній шарнірно-важільними механізмами та двигунами їх приводу, який відрізняється тим, що послідовно з'єднані шарнірні паралелограми виконані з можливістю плоско-паралельного руху кінцевої ланки із сталим кутом її нахилу до горизонту, причому, захватний орган має чітко визначене положення в просторі, за рахунок використання додатково двох шарнірно з'єднаних важелів. 2 UA 84692 U Комп’ютерна верстка С. Чулій Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
Автори англійськоюOnofriichuk Volodymyr Ivanovych, Drapak Heorhii Mefodiiovych
Автори російськоюОнофрийчук Владимир Иванович, Драпак Георгий Мефодьевич
МПК / Мітки
МПК: B25J 11/00
Мітки: маніпулятор
Код посилання
<a href="https://ua.patents.su/5-84692-manipulyator.html" target="_blank" rel="follow" title="База патентів України">Маніпулятор</a>
Маніпулятор
Номер патенту: 9564
Опубліковано: 17.10.2005
Автори: Бергер Євгеній Емильович, Табацков Вячеслав Петрович, Бергер Еміль Григорович, Іванов Геннадій Олександрович
МПК: B25J 11/00
Мітки: маніпулятор
Формула / Реферат:
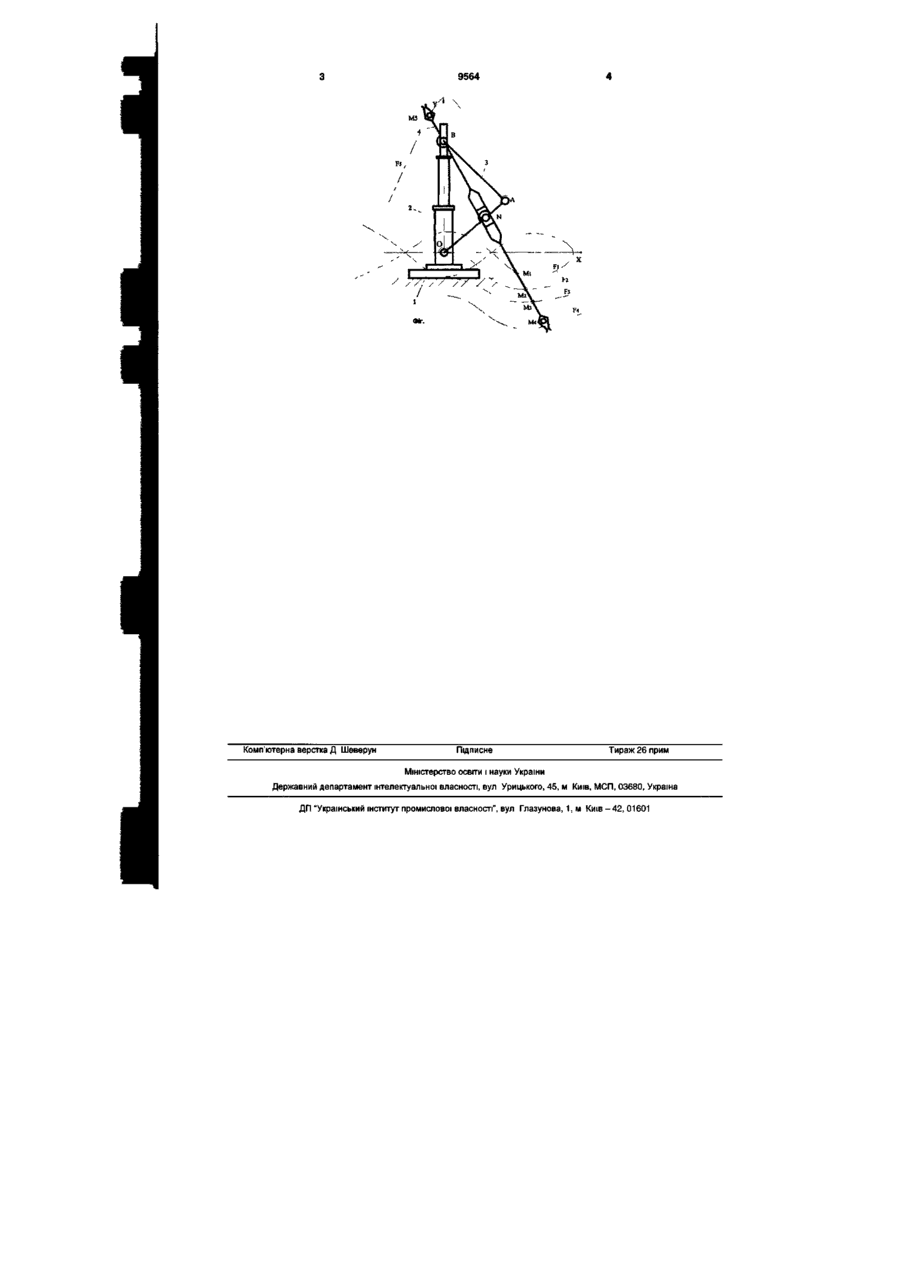
Маніпулятор, який має основу з силовим циліндром та захоплювач руки робота, який відрізняється тим, що він обладнаний кривошипно-шатунним механізмом, ланки якого шарнірно закріплені до штока корпусу силового циліндра кулісою, яка оснащена розмічальними штифтами.
Маніпулятор

Номер патенту: 50260
Опубліковано: 15.10.2002
Автори: Москаленко Олександр Володимирович, Вігдергауз Леонід Павлович
МПК: E21B 1/00
Мітки: маніпулятор
Формула / Реферат:
Маніпулятор, що складається із стріли, шарнірно приєднаної до нерухомої напрямної телескопічного подавача бурильної машини, спареного гідроциліндра переміщення подавача нагору і вниз, гідроциліндра переміщення стріли маніпулятора у вертикальній площині, гідроциліндра повороту стріли маніпулятора за допомогою рейкової зубчатої передачі і кронштейна, до якого приєднана стріла, і гідроциліндра переміщення стріли у вертикальній площині, який...
Кувальний маніпулятор

Номер патенту: 70233
Опубліковано: 11.06.2012
Автори: Колоколов Олексій Юрійович, Стоколясов Олексій Миколайоваич, Богун Віктор Петрович
МПК: B21J 13/10
Мітки: маніпулятор, кувальний
Формула / Реферат:
1. Кувальний маніпулятор, що містить основу, механізм переміщення кувального маніпулятора, що встановлений на основі, передні ходові візки та задні ходові візки, на які встановлена основа, хобот, захоплювач, який розташований на хоботі, передній важіль, задній важіль, передній вал, задній вал, передні тяглі, задні тяглі, гідроциліндри відкочування, гідроциліндри підйому, гідроциліндри нахилу, передній гідроциліндр поперечного зсуву, задній...
Ковальський маніпулятор
Номер патенту: 10294
Опубліковано: 15.11.2005
Автори: Роганов Максим Львович, Роганов Лев Леонідович, Корчак Олена Сергіївна
МПК: B21J 13/00
Мітки: маніпулятор, ковальський
Формула / Реферат:
Ковальський маніпулятор, що містить маніпулюючий хобот, шасі у вигляді зварної рами, механізм пересування у вигляді двох колісних пар, які переміщуються уздовж рейкового шляху, рух яким надається від приводу, додаткову колісну пару, яка зв'язана з задньою колісною парою механізму пересування маніпулятора та пересувається по додатковому рейковому шляху, який прокладено під вже існуючим та паралельно йому, який відрізняється тим, що ковальський...
Маніпулятор для реабілітації осіб з недорозвиненими в русі кінцівками
Номер патенту: 94411
Опубліковано: 10.05.2011
Автор: Клімасара Войцєх
МПК: B25J 15/00, B25J 13/00, A61H 99/00, B25J 5/00
Мітки: русі, кінцівками, осіб, недорозвиненими, маніпулятор, реабілітації
Формула / Реферат:
1. Маніпулятор для реабілітації осіб з недорозвиненими в русі кінцівками, зокрема нижніми кінцівками, оснащений системою керування, розміщеною у шафі керування, установленій на підставі, що складається з кронштейна (15), з'єднаного одним кінцем з валом системи приводу (16), а іншим кінцем із другим кронштейном (14), який в свою чергу з'єднаний з валом системи приводу (9), при цьому вали систем приводу (9, 16) розташовані на одній осі, а...