Спосіб робастного керування багатовимірним динамічним об’єктом
Номер патенту: 57100
Опубліковано: 10.02.2011
Автори: Тимченко Віктор Леонідович, Кукліна Катерина Олексіївна, Кондратенко Юрій Пантелійович


Формула / Реферат
Спосіб робастного керування багатовимірним динамічним об'єктом, згідно з яким керування об'єктом за допомогою системи керування полягає у формуванні сигналу, відповідного вектору керування, на основі суми вихідних сигналів динамічного об'єкта керування та блока формування заданої траєкторії, які надсилають до блока формування обмеження векторної функції відхилень від заданої траєкторії, до якого також з блока оптимізації надсилають сигнал уточнених параметрів, які забезпечують задані динамічні властивості замкнутій системі керування, який формують на основі вихідних сигналів динамічного об'єкта керування, блока формування заданої траєкторії та обчислювального блока таким чином, щоб функціонал якості керування приймав екстремальне значення, а сформований сигнал обмеження векторної функції надсилають до обчислювального блока, де сигнал, відповідний вектору керування, формують як рішення рівняння обмеження відносно шуканого вектора керування та його k перших похідних, який відрізняється тим, що у блоці формування оптимальної заданої траєкторії еталонної моделі багатовимірного динамічного об'єкта на основі використовуваного принципу оптимальності та заданих граничних умов формують на базі блока еталонної моделі багатовимірного динамічного об'єкта і блока оптимізації оптимальну задану траєкторію руху, при цьому з першого виходу блока формування оптимальної заданої траєкторії подають сигнал оптимального керування, який підсумовують з вихідним сигналом корегувального керуючого пристрою, який формують на основі суми сигналу з другого виходу блока формування оптимальної заданої траєкторії та від'ємного вихідного сигналу багатовимірного динамічного об'єкта керування, який знаходиться під дією зовнішнього збурення, а сумарний сигнал направляють на вхід багатовимірного динамічного об'єкта керування для досягнення заданого стану.
Текст
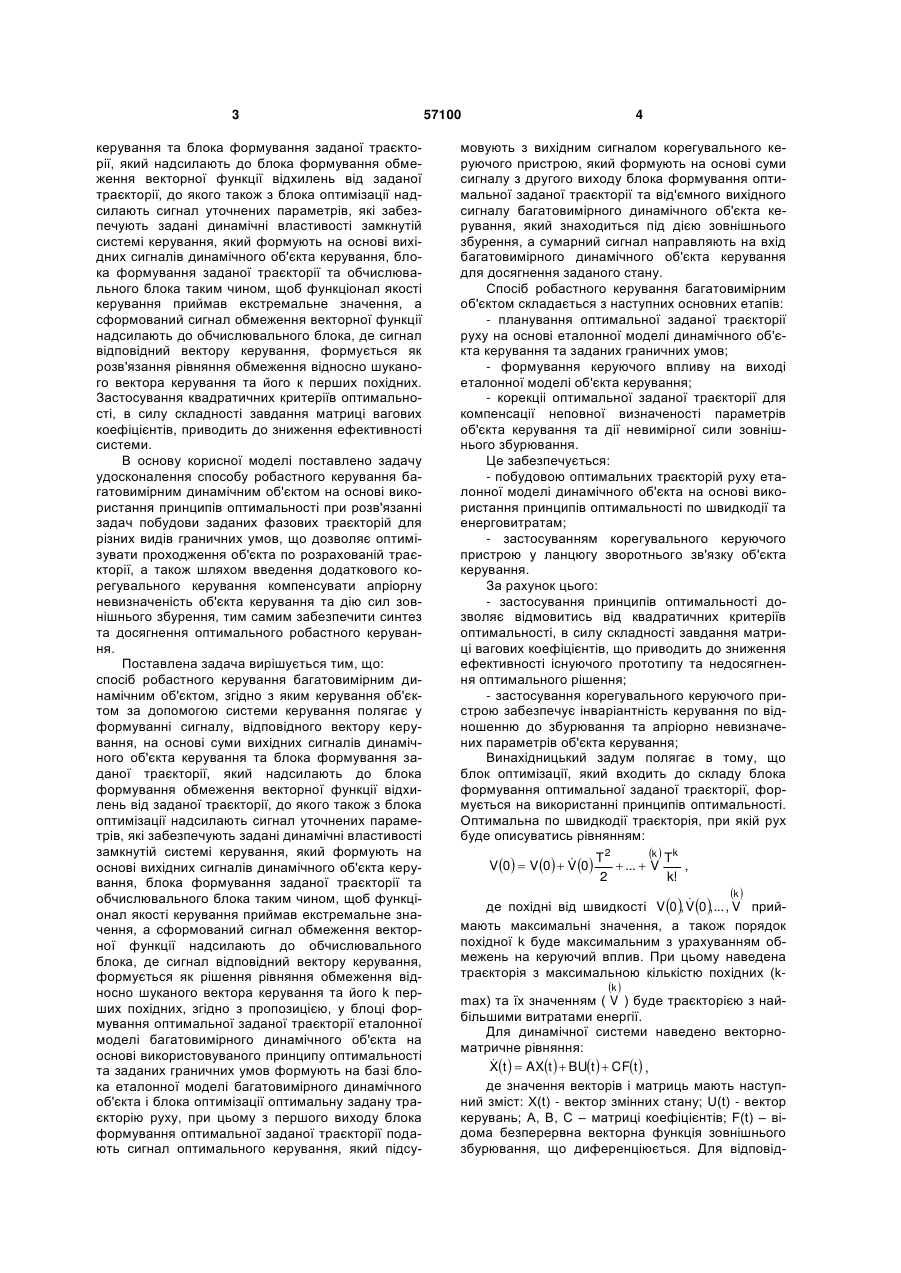
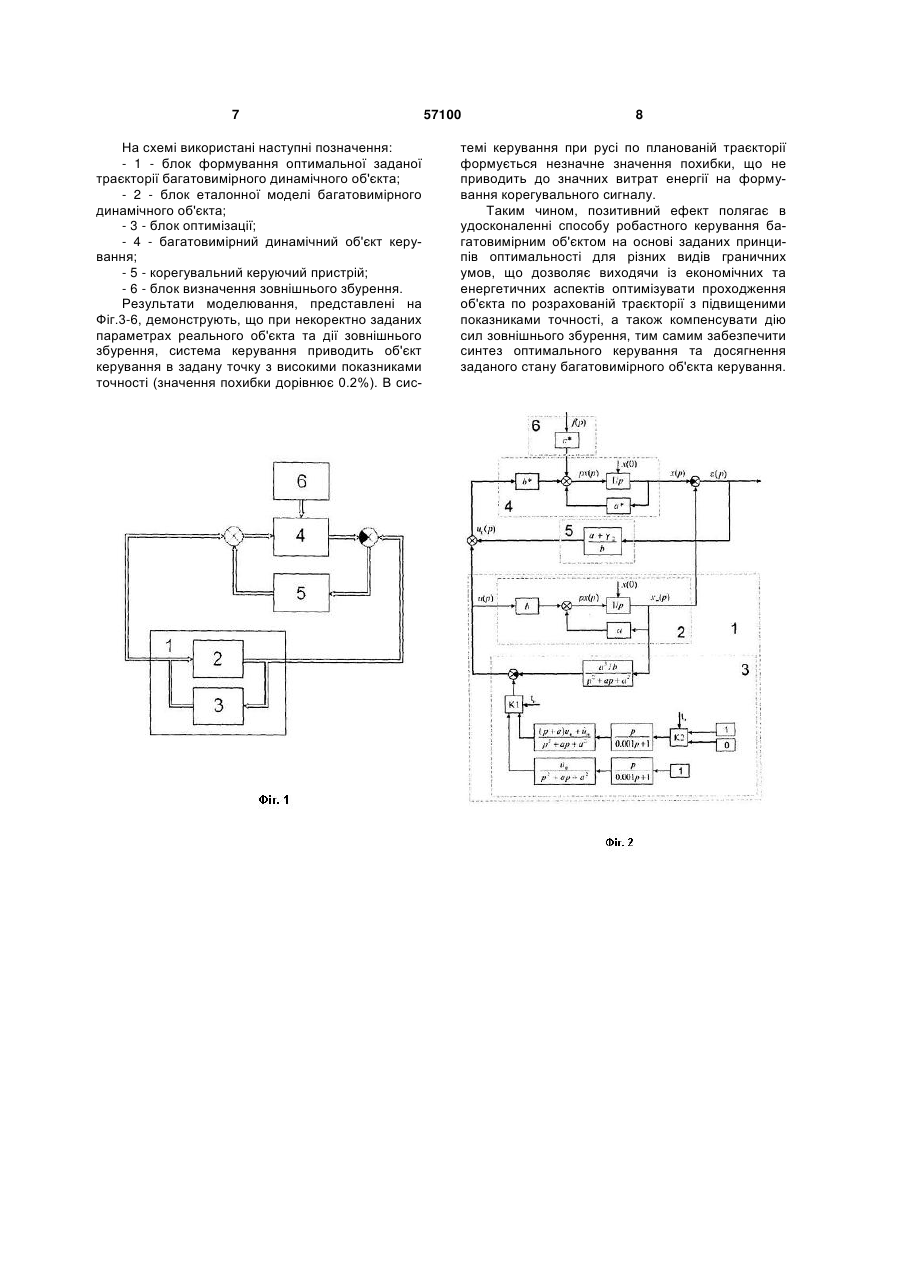
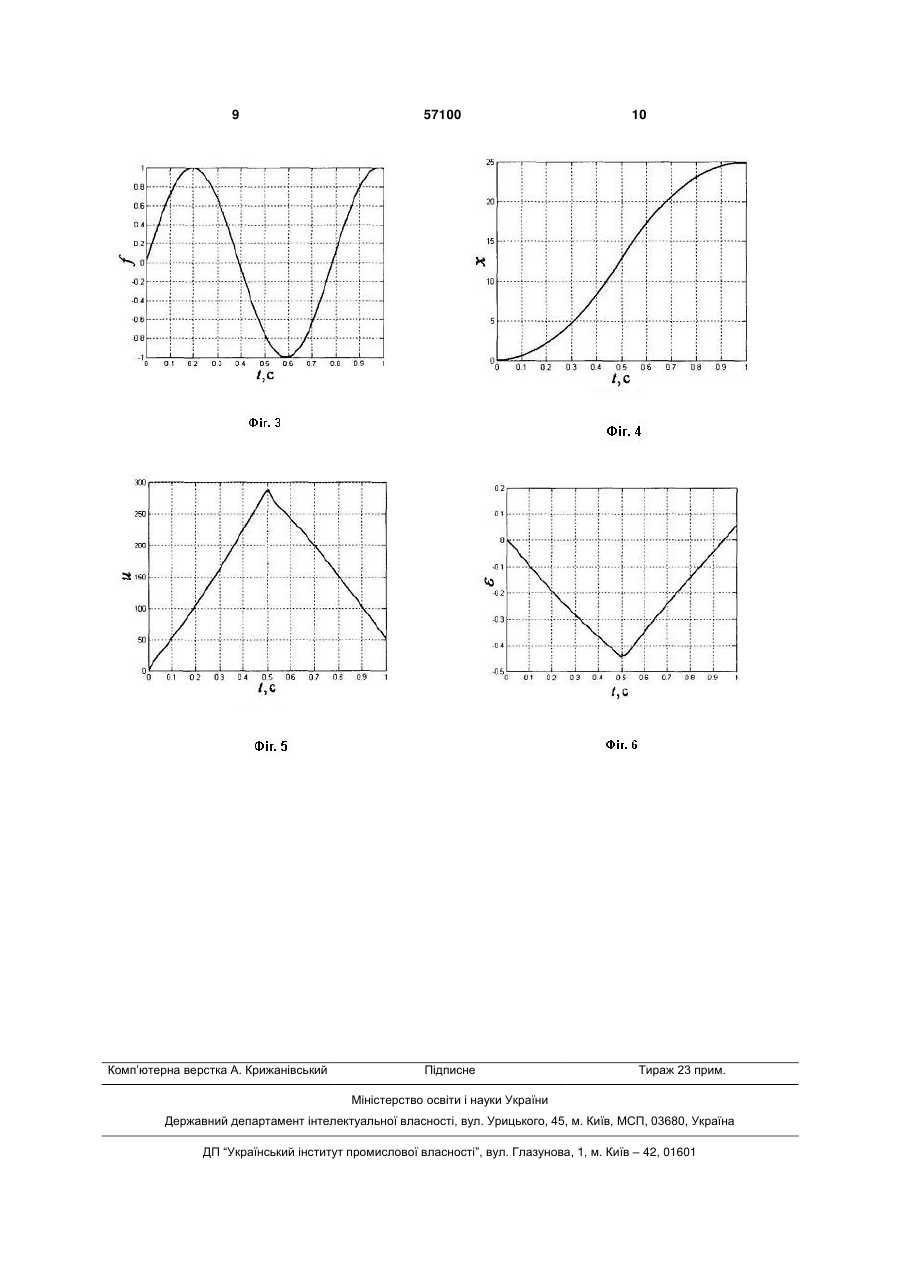
Спосіб робастного керування багатовимірним динамічним об'єктом, згідно з яким керування об'єктом за допомогою системи керування полягає у формуванні сигналу, відповідного вектору керування, на основі суми вихідних сигналів динамічного об'єкта керування та блока формування заданої траєкторії, які надсилають до блока формування обмеження векторної функції відхилень від заданої траєкторії, до якого також з блока оптимізації надсилають сигнал уточнених параметрів, які забезпечують задані динамічні властивості замкнутій системі керування, який формують на основі вихідних сигналів динамічного об'єкта керування, блока формування заданої траєкторії та обчислювального блока таким чином, щоб функціонал якості керування приймав екстремальне зна U 2 (13) 1 3 керування та блока формування заданої траєкторії, який надсилають до блока формування обмеження векторної функції відхилень від заданої траєкторії, до якого також з блока оптимізації надсилають сигнал уточнених параметрів, які забезпечують задані динамічні властивості замкнутій системі керування, який формують на основі вихідних сигналів динамічного об'єкта керування, блока формування заданої траєкторії та обчислювального блока таким чином, щоб функціонал якості керування приймав екстремальне значення, а сформований сигнал обмеження векторної функції надсилають до обчислювального блока, де сигнал відповідний вектору керування, формується як розв'язання рівняння обмеження відносно шуканого вектора керування та його к перших похідних. Застосування квадратичних критеріїв оптимальності, в силу складності завдання матриці вагових коефіцієнтів, приводить до зниження ефективності системи. В основу корисної моделі поставлено задачу удосконалення способу робастного керування багатовимірним динамічним об'єктом на основі використання принципів оптимальності при розв'язанні задач побудови заданих фазових траєкторій для різних видів граничних умов, що дозволяє оптимізувати проходження об'єкта по розрахованій траєкторії, а також шляхом введення додаткового корегувального керування компенсувати апріорну невизначеність об'єкта керування та дію сил зовнішнього збурення, тим самим забезпечити синтез та досягнення оптимального робастного керування. Поставлена задача вирішується тим, що: спосіб робастного керування багатовимірним динамічним об'єктом, згідно з яким керування об'єктом за допомогою системи керування полягає у формуванні сигналу, відповідного вектору керування, на основі суми вихідних сигналів динамічного об'єкта керування та блока формування заданої траєкторії, який надсилають до блока формування обмеження векторної функції відхилень від заданої траєкторії, до якого також з блока оптимізації надсилають сигнал уточнених параметрів, які забезпечують задані динамічні властивості замкнутій системі керування, який формують на основі вихідних сигналів динамічного об'єкта керування, блока формування заданої траєкторії та обчислювального блока таким чином, щоб функціонал якості керування приймав екстремальне значення, а сформований сигнал обмеження векторної функції надсилають до обчислювального блока, де сигнал відповідний вектору керування, формується як рішення рівняння обмеження відносно шуканого вектора керування та його k перших похідних, згідно з пропозицією, у блоці формування оптимальної заданої траєкторії еталонної моделі багатовимірного динамічного об'єкта на основі використовуваного принципу оптимальності та заданих граничних умов формують на базі блока еталонної моделі багатовимірного динамічного об'єкта і блока оптимізації оптимальну задану траєкторію руху, при цьому з першого виходу блока формування оптимальної заданої траєкторії подають сигнал оптимального керування, який підсу 57100 4 мовують з вихідним сигналом корегувального керуючого пристрою, який формують на основі суми сигналу з другого виходу блока формування оптимальної заданої траєкторії та від'ємного вихідного сигналу багатовимірного динамічного об'єкта керування, який знаходиться під дією зовнішнього збурення, а сумарний сигнал направляють на вхід багатовимірного динамічного об'єкта керування для досягнення заданого стану. Спосіб робастного керування багатовимірним об'єктом складається з наступних основних етапів: - планування оптимальної заданої траєкторії руху на основі еталонної моделі динамічного об'єкта керування та заданих граничних умов; - формування керуючого впливу на виході еталонної моделі об'єкта керування; - корекціі оптимальної заданої траєкторії для компенсації неповної визначеності параметрів об'єкта керування та дії невимірної сили зовнішнього збурювання. Це забезпечується: - побудовою оптимальних траєкторій руху еталонної моделі динамічного об'єкта на основі використання принципів оптимальності по швидкодії та енерговитратам; - застосуванням корегувального керуючого пристрою у ланцюгу зворотнього зв'язку об'єкта керування. За рахунок цього: - застосування принципів оптимальності дозволяє відмовитись від квадратичних критеріїв оптимальності, в силу складності завдання матриці вагових коефіцієнтів, що приводить до зниження ефективності існуючого прототипу та недосягнення оптимального рішення; - застосування корегувального керуючого пристрою забезпечує інваріантність керування по відношенню до збурювання та апріорно невизначених параметрів об'єкта керування; Винахідницький задум полягає в тому, що блок оптимізації, який входить до складу блока формування оптимальної заданої траєкторії, формується на використанні принципів оптимальності. Оптимальна по швидкодії траєкторія, при якій рух буде описуватись рівнянням: V 0 V 0 V 0 k Tk T2 ... V , 2 k! k де похідні від швидкості V 0 , V 0 ,... , V приймають максимальні значення, а також порядок похідної k буде максимальним з урахуванням обмежень на керуючий вплив. При цьому наведена траєкторія з максимальною кількістю похідних (k k max) та їх значенням ( V ) буде траєкторією з найбільшими витратами енергії. Для динамічної системи наведено векторноматричне рівняння: Xt AXt BUt CFt , де значення векторів і матриць мають наступний зміст: X(t) - вектор змінних стану; U(t) - вектор керувань; А, В, С – матриці коефіцієнтів; F(t) – відома безперервна векторна функція зовнішнього збурювання, що диференціюється. Для відповід 5 57100 них (другої і до n-ої) нульових похідних вектора X(t) отримано для керуючих функцій після засто 6 сування перетворення Лапласа при початкових n2 умовах U0,..., U 0 : U(p) B1 A pE1 A 2 X(p) BU(0) CF(p) n2 1 Up B1 pn1E An де матриця An (1) n n2 A Xp B U 0 ... A BU0 CFp Таким чином, для вектора похибки та її похід n 2 piAn j1 . ної j 0 Для формування корегувального сигналу нижче наведено рівняння руху еталонної моделі динамічного об'єкта у вигляді: Xm t AXm t BUt , де Xm, X - координати моделі; m та реального об'єкту керування при відсутності зовнішніх збурень: Xm t AXm t BUt , t Xm t Xt ; t Xm t Xt рівняння записано наступним чином t At BU t . При виконанні заданих умов для вектора похибок системи G2t G1t t 0 , де G1, G2 - позитивно визначені симетричні матриці вагових коефіцієнтів, записано для вектора корегувальних сигналів U p B1pE A G1E1 A 2 G1A G2 p BU 0 Фіг. 1 Блок - схема реалізації способу робастного керування багатовимірним об'єктом Фіг.2. Систему керування об'єктом першого порядку; Фіг.3 Характеристика зовнішнього збурення; Фіг.4 Траєкторія руху динамічної моделі об'єкта керування; Фіг.5 Характеристика керуючого впливу; Фіг.6 Графік зміни похибки системи з часом. На Фіг.1 представлено блок - схему реалізації способу робастного керування багатовимірним об'єктом, на якій блок формування оптимальної заданої траєкторії багатовимірного динамічного об'єкта 1 включає блок еталонної моделі багатовимірного динамічного об'єкта 2, вихід якого зв'язано з входом блока оптимізації 3, вихід якого зв'язано з входом блока еталонної моделі багатовимірного динамічного об'єкта 2. Перший вихід блока формування оптимальної заданої траєкторії багатовимірного динамічного об'єкта 1 пов'язано через перший вхід першого суматора з першим входом багатовимірного динамічного об'єкта керування 4. Другий вхід першого суматора зв'язано з виходом корегувального керуючого пристрою 5. Вхід корегувального керуючого пристрою 5 з'єднано з виходом другого суматора, перший з входів якого приєднано до виходу багатовимірного динамічного об'єкта керування 4, другий вхід поєднано з другим виходом блока формування оптимальної заданої траєкторії 1. Блок 6 визначає зовнішнє збурення, яке діє на багатовимірний динамічний об'єкт 4. Спосіб робастного керування багатовимірним динамічним об'єктом реалізується наступним чином. У блоці формування оптимальної заданої траєкторії багатовимірного динамічного об'єкта 1 на основі блока еталонної моделі багатовимірного (2) динамічного об'єкта 2 і блока оптимізації 3 на базі використовуваного принципу оптимальності та заданих граничних умов формують оптимальну задану траєкторію руху, з першого виходу блока формування оптимальної заданої траєкторії 1 подають сигнал оптимального керування, розрахований по формулі (1), для відповідної нульової похідної вихідного сигналу багатовимірного об'єкта керування, на перший вхід першого суматора, на другий вхід першого суматора подають вихідний сигнал з корегувального керуючого пристрою 5, розрахований по формулі (2) для заданих умов похибки та її похідних, який формують на основі вихідного сигналу з другого суматора, на перший вхід якого подають сигнал з другого виходу блока формування оптимальної заданої траєкторії 1, а на другий вхід - від'ємний вихідний сигнал багатовимірного динамічного об'єкта керування 4, який знаходиться під дією зовнішнього збурення, а вихідний сигнал першого суматора направляють до першого входу багатовимірного динамічного об'єкта керування 4 для досягнення заданого стану. Розглянемо, як приклад реалізації способу робастного керування багатовимірним динамічним об'єктом, систему керування (Фіг.2) об'єктом першого порядку, що описується рівнянням x t axt but u t з початкового стану х=0, x 0 в заданий стан х=25, x 0 за умови 0 . x Параметри реального об'єкта визначаються некоректно наступним чином: а*=-0.5; b*=0.5. Параметри еталонної моделі: а=-0.1, b=0.1. Траєкторія руху об'єкта складається з двох відрізків. Перший відрізок: t=0÷0.5 с, 100 ; другий відрізок: x t=0.5÷1.0с, 100 . В момент часу t=0.5с здійсx нюється перемикання керуючих функцій. Корегувальний сигнал має наступний вигляд: u(р)=299(р). 7 На схемі використані наступні позначення: - 1 - блок формування оптимальної заданої траєкторії багатовимірного динамічного об'єкта; - 2 - блок еталонної моделі багатовимірного динамічного об'єкта; - 3 - блок оптимізації; - 4 - багатовимірний динамічний об'єкт керування; - 5 - корегувальний керуючий пристрій; - 6 - блок визначення зовнішнього збурення. Результати моделювання, представлені на Фіг.3-6, демонструють, що при некоректно заданих параметрах реального об'єкта та дії зовнішнього збурення, система керування приводить об'єкт керування в задану точку з високими показниками точності (значення похибки дорівнює 0.2%). В сис 57100 8 темі керування при русі по планованій траєкторії формується незначне значення похибки, що не приводить до значних витрат енергії на формування корегувального сигналу. Таким чином, позитивний ефект полягає в удосконаленні способу робастного керування багатовимірним об'єктом на основі заданих принципів оптимальності для різних видів граничних умов, що дозволяє виходячи із економічних та енергетичних аспектів оптимізувати проходження об'єкта по розрахованій траєкторії з підвищеними показниками точності, а також компенсувати дію сил зовнішнього збурення, тим самим забезпечити синтез оптимального керування та досягнення заданого стану багатовимірного об'єкта керування. 9 Комп’ютерна верстка А. Крижанівський 57100 Підписне 10 Тираж 23 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюRobust control method for multivariable dynamic object
Автори англійськоюTymchenko Viktor Leonidovych, Kondratenko Yurii Panteliiovych, Kuklina Kateryna Oleksiivna
Назва патенту російськоюСпособ робастного управления многомерным динамическим объектом
Автори російськоюТымченко Виктор Леонидович, Кондратенко Юрий Пантелеевич, Куклина Екатерина Алексеевна
МПК / Мітки
МПК: G05B 11/01
Мітки: динамічним, спосіб, керування, багатовимірним, об'єктом, робастного
Код посилання
<a href="https://ua.patents.su/5-57100-sposib-robastnogo-keruvannya-bagatovimirnim-dinamichnim-obehktom.html" target="_blank" rel="follow" title="База патентів України">Спосіб робастного керування багатовимірним динамічним об’єктом</a>
Спосіб керування багатовимірним динамічним об’єктом
Номер патенту: 53614
Опубліковано: 11.10.2010
Автори: Кукліна Катерина Олексіївна, Кондратенко Юрій Пантелійович, Тимченко Віктор Леонідович
МПК: G05B 11/01
Мітки: багатовимірним, динамічним, об'єктом, керування, спосіб
Формула / Реферат:
Спосіб керування багатовимірним динамічним об'єктом, згідно з яким керування об'єктом за допомогою системи керування полягає у формуванні управляючого впливу на основі результатів порівняння задавального впливу та суми значень виміряних змінних стану об'єкта, яка доповнена значеннями змінних, виміряних безпосередньо за межами прикладення впливів, який відрізняється тим, що у блоці визначення моментів перемикань ключів апріорно розраховують...
Спосіб адаптивного управління динамічним об’єктом в системах термінального управління
Номер патенту: 51941
Опубліковано: 10.08.2010
Автори: Копилова Зінаїда Миколаївна, Мельник Олександр Дмитрович, Кучеров Дмитро Павлович, Іванов Борис Павлович
МПК: G05B 11/00, G05B 13/00
Мітки: динамічним, адаптивного, об'єктом, управління, спосіб, системах, термінального
Формула / Реферат:
Спосіб адаптивного управління динамічним об'єктом в системах термінального управління, за яким в системі керування встановлюють вхідні дані, що включають бажану похибку відпрацювання завдання об'єктом керування, вхідні дані про кінцевий та початковий стан об'єкта керування, початкові значення вагових коефіцієнтів контролера, значення початкового керування в системі термінального управління, та в процесі руху вимірюють координати об'єкта...
Слідкуюча система з динамічним компенсатором збурень
Номер патенту: 36874
Опубліковано: 10.11.2008
Автори: Дибська Ирина Юріївна, Лугових Наталя Ігорівна, Бандура Іван Миколайович
МПК: B23C 1/00
Мітки: система, збурень, слідкуюча, динамічним, компенсатором
Формула / Реферат:
Слідкуюча система з динамічним компенсатором збурень, що містить регулятор, який послідовно з'єднаний з підсилювачем потужності, об'єктом керування, редуктором, вихід об'єкта керування також підключений до входу тахогенератора, вихід якого підключений до входу другого суматора, а вихід редуктора підключений до входу потенціометра, вихід якого підключений до входу першого суматора, яка відрізняється тим, що в неї введені система спостереження...
Спосіб оптимального керування процесом флотації
Номер патенту: 29325
Опубліковано: 10.01.2008
Автори: Ульшин Віталій Олександрович, Шульгін Сергій Костянтинович
МПК: B03B 13/00
Мітки: процесом, спосіб, флотації, оптимального, керування
Формула / Реферат:
Спосіб оптимального керування процесом флотації, який включає досягнення необхідних значень режимних параметрів процесів вуглезбагачення в реальному масштабі часу шляхом визначення оптимальних значень керуючих впливів відповідних виконавчих механізмів процесів вуглезбагачення на базі методу динамічного програмування Белмана, коли інформацію про стан режимного параметра з виходу датчика подають на вхід блока, що ідентифікує значення дисперсії...
Спосіб оптимального керування режимними параметрами процесів вуглезбагачення
Номер патенту: 6991
Опубліковано: 15.06.2005
Автори: Зубов Дмитро Анатолійович, Ульшин Віталій Олександрович, Килимник Олег Вікторович
МПК: B03B 13/00
Мітки: керування, параметрами, оптимального, режимними, вуглезбагачення, процесів, спосіб
Формула / Реферат:
Спосіб оптимального керування режимними параметрами процесів вуглезбагачення, який полягає в досягненні необхідних значень режимних параметрів процесів вуглезбагачення в реальному масштабі часу шляхом визначення оптимальних значень керуючих впливів відповідних виконавчих механізмів процесів вуглезбагачення на базі методу динамічного програмування Белмана, який відрізняється тим, що інформацію про стан режимного параметра з виходу датчика...
Попередній патент: Форсунка пісочниці локомотива
Наступний патент: Процес інваріантного формування тягового зусилля машинно-тракторного агрегату
Випадковий патент: Спосіб виготовлення теплообмінного елемента