Двокоординатний пристрій для реєстрації сигналу проковзування
Номер патенту: 82115
Опубліковано: 25.07.2013
Автори: Запорожець Юрій Михайлович, Кондратенко Юрій Пантелійович
Формула / Реферат
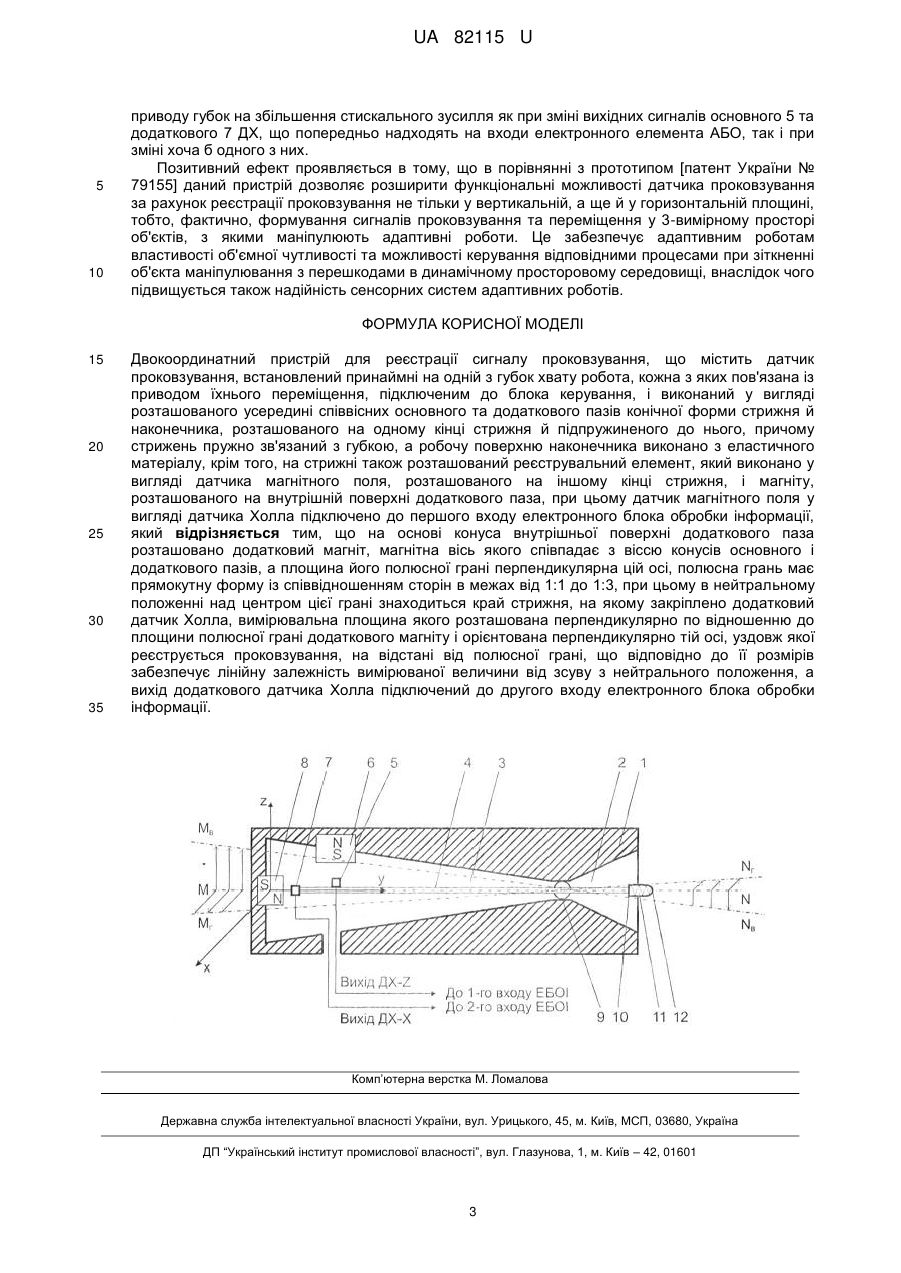
Двокоординатний пристрій для реєстрації сигналу проковзування, що містить датчик проковзування, встановлений принаймні на одній з губок хвату робота, кожна з яких пов'язана із приводом їхнього переміщення, підключеним до блока керування, і виконаний у вигляді розташованого усередині співвісних основного та додаткового пазів конічної форми стрижня й наконечника, розташованого на одному кінці стрижня й підпружиненого до нього, причому стрижень пружно зв'язаний з губкою, а робочу поверхню наконечника виконано з еластичного матеріалу, крім того, на стрижні також розташований реєструвальний елемент, який виконано у вигляді датчика магнітного поля, розташованого на іншому кінці стрижня, і магніту, розташованого на внутрішній поверхні додаткового паза, при цьому датчик магнітного поля у вигляді датчика Холла підключено до першого входу електронного блока обробки інформації, який відрізняється тим, що на основі конуса внутрішньої поверхні додаткового паза розташовано додатковий магніт, магнітна вісь якого співпадає з віссю конусів основного і додаткового пазів, а площина його полюсної грані перпендикулярна цій осі, полюсна грань має прямокутну форму із співвідношенням сторін в межах від 1:1 до 1:3, при цьому в нейтральному положенні над центром цієї грані знаходиться край стрижня, на якому закріплено додатковий датчик Холла, вимірювальна площина якого розташована перпендикулярно по відношенню до площини полюсної грані додаткового магніту і орієнтована перпендикулярно тій осі, уздовж якої реєструється проковзування, на відстані від полюсної грані, що відповідно до її розмірів забезпечує лінійну залежність вимірюваної величини від зсуву з нейтрального положення, а вихід додаткового датчика Холла підключений до другого входу електронного блока обробки інформації.
Текст
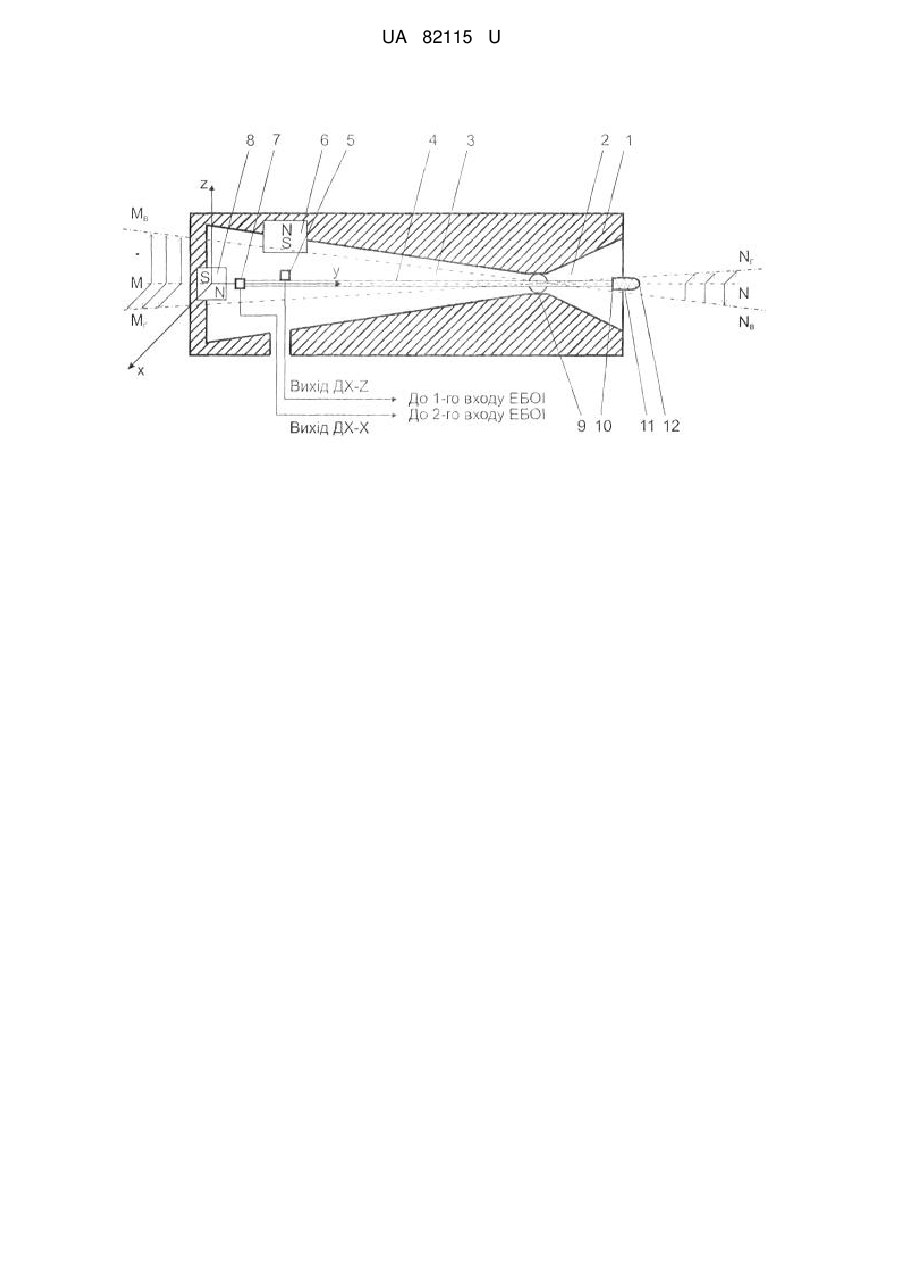
Реферат: Двокоординатний пристрій для реєстрації сигналу проковзування містить датчик проковзування, встановлений принаймні на одній з губок хвату робота, кожна з яких пов'язана із приводом їхнього переміщення, підключеним до блока керування, і виконаний у вигляді розташованого усередині співвісних основного та додаткового пазів конічної форми стрижня й наконечника, розташованого на одному кінці стрижня й підпружиненого до нього, причому стрижень пружно зв'язаний з губкою, а робочу поверхню наконечника виконано з еластичного матеріалу, крім того, на стрижні також розташований реєструвальний елемент, який виконано у вигляді датчика магнітного поля, розташованого на іншому кінці стрижня, і магніту, розташованого на внутрішній поверхні додаткового паза, при цьому датчик магнітного поля у вигляді датчика Холла підключено до першого входу електронного блока обробки інформації. На основі конуса внутрішньої поверхні додаткового паза розташовано додатковий магніт, магнітна вісь якого співпадає з віссю конусів основного і додаткового пазів, а площина його полюсної грамі перпендикулярна цій осі, полюсна грань має прямокутну форму із співвідношенням сторін в межах від 1:1 до 1:3. В нейтральному положенні над центром цієї грані знаходиться край стрижня, на якому закріплено додатковий датчик Холла, вимірювальна площина якого розташована перпендикулярно по відношенню до площини полюсної грані додаткового магніту і орієнтована перпендикулярно тій осі, уздовж якої реєструється проковзування, на відстані від полюсної грані, що відповідно до її розмірів забезпечує лінійну залежність вимірюваної величини від зсуву з нейтрального положення. Вихід додаткового датчика Холла підключений до другого входу електронного блока обробки інформації. UA 82115 U (12) UA 82115 U UA 82115 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до робототехніки й може бути використана в конструкціях та системах управління адаптивних роботів з чутливими захватними органами, що адаптуються до маси об'єктів маніпулювання, які захоплюють. Відомо про пристрої для реєстрації сигналу проковзування на основі датчиків проковзування, що безпосередньо контактують з об'єктом маніпулювання (деталлю). В цих пристроях реєструється переміщення рухливого елемента датчика, що відбувається внаслідок проковзування деталі в хваті робота. Прикладом такого датчика для реєстрації сигналу проковзування є пристрій, який виконано у вигляді стрижня, розташованого в конічному пазу однієї з губок хвату робота таким чином, що один кінець стрижня пружно зв'язаний з губкою, а на другому кінці встановлений на пружному елементі наконечник з еластичного матеріалу, який безпосередньо контактує з деталлю [а. с. СРСР № 1252168, В25 J 19/02, опубл. Бюл. № 31, 1986]. Реєструвальний елемент цього датчика проковзування виконано у вигляді конденсатора, обкладки якого розташовані на зовнішній поверхні стрижня й внутрішній поверхні конічного паза. Такий датчик проковзування має наступні проблеми: - низька перешкодостійкість, оскільки ємність конденсатора з повітряним зазором дуже чутлива до наявності будь-якого пилу або іншого забруднення, що обумовлює високу імовірність хибних спрацювань датчика; - обмеженість функціональних можливостей, оскільки переміщення стрижня і розташованої на його зовнішній поверхні обкладки конденсатора забезпечує реєстрацію проковзування тільки в напрямку сили тяжіння, тоді як в реальних умовах захват деталі може відбуватись під деяким кутом, внаслідок чого сигнал керування приводом губок хвату може з'явитись із затримкою і спричинити несправність. Більш досконалим з цієї точки зору є пристрій для реєстрації сигналу проковзування згідно з патентом України № 79155 МПК, B25J 19/02, B25J 13/08, 2007, що прийнятий за прототип. У цьому пристрої в губці виконано додатковий паз конічної форми, розташований вершиною конічної поверхні співвісно з відповідною вершиною основного паза, причому стрижень пружно закріплений на губці в місці з'єднання основного й додаткового пазів, а реєструвальний елемент виконано у вигляді датчика магнітного поля, розташованого на іншому кінці стрижня, і магніту, розташованого на внутрішній поверхні додаткового паза, при цьому датчик магнітного поля підключений до входу електронного блока, що формує сигнал керування приводом переміщення губок при наявності проковзування. Оскільки як датчик магнітного поля може бути використаний, наприклад, датчик Холла (ДХ), то звичайний пил та інше забруднення (крім феромагнітних стружок) не впливають на покази ДХ, тому головна вада наведеного вище аналога - низька перешкодостійкість - в цьому варіанті датчика проковзування виключена. Разом з тим, функціональні можливості цього пристрою-прототипа залишаються обмеженими, оскільки за принципом дії він здатний реєструвати проковзування деталей тільки в одному напрямку - напрямку сили тяжіння (по вертикальній координаті). В основу корисної моделі поставлено задачу удосконалення пристрою для реєстрації сигналу проковзування шляхом введення додаткових магніточутливих елементів для модернізації конструкції чутливої системи датчика проковзування та електронного блока обробки сигналу від датчика проковзування з метою розширення функціональних можливостей пристрою, зокрема, для формування сигналів при проковзуванні деталей в будь-якому напрямку між захватними губками хвата адаптивного робота. Поставлена задача вирішується тим, що в пристрої для реєстрації сигналу проковзування, що містить датчик проковзування, встановлений принаймні на одній з губок хвату робота, кожна з яких пов'язана із приводом їхнього переміщення, підключеним до блока керування, і виконаний у вигляді розташованого усередині співвісних основного та додаткового пазів конічної форми стрижня й наконечника, розташованого на одному кінці стрижня й підпружиненого до нього, причому стрижень пружно зв'язаний з губкою, а робочу поверхню наконечника виконано з еластичного матеріалу, крім того, на стрижні також розташований реєструвальний елемент, який виконано у вигляді датчика магнітного поля, розташованого на іншому кінці стрижня, і магніту, розташованого на внутрішній поверхні додаткового паза, при цьому датчик магнітного поля у вигляді датчика Холла підключено до першого входу електронного блока обробки інформації, згідно з пропозицією на основі конуса внутрішньої поверхні додаткового паза розташовано додатковий магніт, магнітна вісь якого співпадає з віссю конусів основного і додаткового пазів, а площина його полюсної грані перпендикулярна цій осі, полюсна грань має прямокутну форму із співвідношенням сторін в межах від 1:1 до 1:3, при цьому в нейтральному положенні над центром цієї грані знаходиться кінець стрижня, на якому закріплено додатковий датчик Холла, вимірювальна площина якого розташована перпендикулярно по відношенню до площини полюсної грані магніту і орієнтована 1 UA 82115 U 5 10 15 20 25 30 35 40 45 50 55 60 перпендикулярно тій осі, уздовж якої реєструється проковзування, на відстані від полюсної грані, що відповідно до її розмірів забезпечує лінійну залежність вимірюваної величини від зсуву з нейтрального положення, а вихід додаткового датчика Холла підключений до другого входу електронного блока обробки інформації. На кресленні представлено конструктивну схему пристрою для реєстрації сигналу проковзування. Пристрій встановлюється у губці 1 хвата, зокрема в основному 2 і додатковому 3 пазах конічної форми, виконаних у губці 1 хвата. Усередині пазів 2, 3 розташований стрижень 4, на якому закріплений датчик магнітного поля 5, що разом з магнітом 6, закріпленим у додатковому пазу 3, утворює перший реєструвальний елемент. На кінці стрижня 4 закріплено додатковий датчик магнітного поля 7, що разом з додатковим магнітом 8 утворює другий реєструвальний елемент. Додатковий магніт 8, магнітна вісь якого співпадає з віссю у конусів основного і додаткового пазів, розташовано на основі конуса внутрішньої поверхні додаткового паза 3. Стрижень 4 закріплений на губці 1 хвата за допомогою пружного елемента 9. На одному з кінців стрижня 4, безпосередньо контактує з об'єктом проковзування, розташований наконечник 10, підпружинений по відношенню до стрижня 4 за допомогою пружного елемента 11. Робоча поверхня 12 наконечника 10 виконана з еластичного матеріалу. Як датчики магнітного поля 5, 7 можуть бути використані датчики Холла, наприклад SS495A фірми Honeywell, виконані у герметичному малогабаритному корпусі. Такі датчики мають на виході аналоговий сигнал, амплітуда якого залежить від напруженості магнітного поля. Вимірювальна площина датчика ДХ 5 розташована паралельно по відношенню до площини полюсної грані магніту 6 і орієнтована перпендикулярно осі z, уздовж якої цим датчиком реєструється проковзування деталі. На фігурі показано, що вихід цього датчика ДХ-Z 5 підключається до першого входу електронного блока обробки інформації (ЕБОІ). Вимірювальна площина датчика ДХ 7 розташована перпендикулярно по відношенню до площини полюсної грані магніту 8 і орієнтованаперпендикулярно осі х, уздовж якої цим датчиком реєструється проковзування деталі. На фігурі показано, що вихід цього датчика ДХ-Х 7 підключається до другого входу ЕБОІ. Запропонований пристрій працює наступним чином. У початковому стані наконечник 10 за допомогою пружини 11 утримується над поверхнею губки 1, а пружний елемент 9 утримує стрижень 4 у такому положенні, що його поздовжня вісь перпендикулярна поверхні губки й збігається з віссю стрижня MN (фігура). При захоплюванні деталі її поверхня приходить у зіткнення з наконечником 10, пружина 11 стискується й наконечник 10 утоплюється в пазу 2. Перед спробним рухом поточні вихідні значення датчика 5 (ДХ-Z) Uz0 та датчика 7 (ДХ-Х) Ux0 передаються відповідно на перший і другий входи ЕБОІ (блок ЕБОІ на фігурі не показано) і фіксуються (запам'ятовуються). Якщо при спробному русі хвата деталь починає проковзувати в напрямку сили тяжіння (по вертикальній координаті z), то внаслідок тертя між поверхнею деталі й робочою поверхнею 12 стрижень 4 відхиляється в площині zOy від нейтрального (початкового) положення MN в положення MвNв, датчик ДХ-Z 5 наближається до полюсної грані магніту 6, внаслідок чого змінюється вихідне значення напруги цього датчика U z. В залежності від різниці напруг ΔU z=Uz0Uz в електронному блоці обробки інформації за допомогою алгоритму, побудованому на основі тривимірної математичної моделі для розрахунку магнітної індукції в магніточутливій системі датчика проковзування [Запорожець Ю.М., Кондратенко Ю.П., Шишкін О.С. Тривимірна математична модель для розрахунку магнітної індукції в магніточутливій системі датчика проковзування // Технічна електродинаміка. - 2008. - № 5. - С. 76-79], формується керуючий сигнал на збільшення стискального зусилля приводом губок хвату до припинення проковзування. Якщо при русі хвата під дією зовнішніх впливів (перешкод) або внаслідок незбалансованості розподілу мас деталі виникає її проковзування в поперечному напрямку (уздовж горизонтальної координати х), то стрижень 4 відхиляється в площині хОу від нейтрального (початкового) положення MN в положення MгNг, датчик ДХ-Х 7 переміщується уздовж полюсної грані магніту 8, внаслідок чого змінюється вихідне значення цього датчика U x. Керуючий сигнал на збільшення стискального зусилля приводом губок хвату формується в ЕБОІ в залежності від різниці ΔUх=Ux0-Ux за допомогою алгоритму, побудованому на основі математичної моделі поперечних складових магнітного поля чутливого елемента датчика проковзування [Запорожець Ю.М., Кондратенко Ю.И., Шишкін О.С. Математична модель датчика проковзування з реєстрацією поперечних складових магнітного поля чутливого елемента // Технічна електродинаміка.-2012. - № 4. - С. 67-71]. Таким чином у випадках проковзування об'єкту маніпулювання в будь-якому напрямку ЕБОІ забезпечує формування керувальних сигналів для 2 UA 82115 U 5 10 приводу губок на збільшення стискального зусилля як при зміні вихідних сигналів основного 5 та додаткового 7 ДХ, що попередньо надходять на входи електронного елемента АБО, так і при зміні хоча б одного з них. Позитивний ефект проявляється в тому, що в порівнянні з прототипом [патент України № 79155] даний пристрій дозволяє розширити функціональні можливості датчика проковзування за рахунок реєстрації проковзування не тільки у вертикальній, а ще й у горизонтальній площині, тобто, фактично, формування сигналів проковзування та переміщення у 3-вимірному просторі об'єктів, з якими маніпулюють адаптивні роботи. Це забезпечує адаптивним роботам властивості об'ємної чутливості та можливості керування відповідними процесами при зіткненні об'єкта маніпулювання з перешкодами в динамічному просторовому середовищі, внаслідок чого підвищується також надійність сенсорних систем адаптивних роботів. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 15 20 25 30 35 Двокоординатний пристрій для реєстрації сигналу проковзування, що містить датчик проковзування, встановлений принаймні на одній з губок хвату робота, кожна з яких пов'язана із приводом їхнього переміщення, підключеним до блока керування, і виконаний у вигляді розташованого усередині співвісних основного та додаткового пазів конічної форми стрижня й наконечника, розташованого на одному кінці стрижня й підпружиненого до нього, причому стрижень пружно зв'язаний з губкою, а робочу поверхню наконечника виконано з еластичного матеріалу, крім того, на стрижні також розташований реєструвальний елемент, який виконано у вигляді датчика магнітного поля, розташованого на іншому кінці стрижня, і магніту, розташованого на внутрішній поверхні додаткового паза, при цьому датчик магнітного поля у вигляді датчика Холла підключено до першого входу електронного блока обробки інформації, який відрізняється тим, що на основі конуса внутрішньої поверхні додаткового паза розташовано додатковий магніт, магнітна вісь якого співпадає з віссю конусів основного і додаткового пазів, а площина його полюсної грані перпендикулярна цій осі, полюсна грань має прямокутну форму із співвідношенням сторін в межах від 1:1 до 1:3, при цьому в нейтральному положенні над центром цієї грані знаходиться край стрижня, на якому закріплено додатковий датчик Холла, вимірювальна площина якого розташована перпендикулярно по відношенню до площини полюсної грані додаткового магніту і орієнтована перпендикулярно тій осі, уздовж якої реєструється проковзування, на відстані від полюсної грані, що відповідно до її розмірів забезпечує лінійну залежність вимірюваної величини від зсуву з нейтрального положення, а вихід додаткового датчика Холла підключений до другого входу електронного блока обробки інформації. Комп’ютерна верстка М. Ломалова Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
Назва патенту англійськоюTwo-axis device for recording slip signal
Автори англійськоюKondratenko Yurii Panteliiovych, Zaporozhets Yurii Mykhailovych
Назва патенту російськоюДвухкоординатное устройство для регистрации сигнала проскальзывания
Автори російськоюКондратенко Юрий Пантелеевич, Запорожец Юрий Михайлович
МПК / Мітки
МПК: B25J 19/02, G05B 19/00
Мітки: двокоординатний, реєстрації, проковзування, сигналу, пристрій
Код посилання
<a href="https://ua.patents.su/5-82115-dvokoordinatnijj-pristrijj-dlya-reehstraci-signalu-prokovzuvannya.html" target="_blank" rel="follow" title="База патентів України">Двокоординатний пристрій для реєстрації сигналу проковзування</a>
Пристрій для реєстрації сигналу проковзування
Номер патенту: 79155
Опубліковано: 25.05.2007
Автори: Кондратенко Юрій Пантелійович, Кондратенко Володимир Юрійович, Шишкін Олександр Сергійович
МПК: B25J 19/02, B25J 13/08
Мітки: пристрій, проковзування, сигналу, реєстрації
Формула / Реферат:
1. Пристрій для реєстрації сигналу проковзування, що містить датчик проковзування, встановлений принаймні на одній з губок схвата робота, кожна з яких зв'язана із приводом їхнього переміщення, підключеним до блока керування, і виконаний у вигляді розташованого усередині основного паза конічної форми стрижня й наконечника, розташованого на одному кінці стрижня й підпружиненого до нього, причому стрижень пружно зв'язаний з губкою, а робочу...
Пристрій для реєстрації сигналу проковзування
Номер патенту: 14566
Опубліковано: 15.05.2006
Автори: Шишкін Олександр Сергійович, Кондратенко Юрій Пантелійович, Кондратенко Володимир Юрійович
МПК: B25J 19/02
Мітки: проковзування, пристрій, реєстрації, сигналу
Формула / Реферат:
Пристрій для реєстрації сигналу проковзування, що містить датчик проковзування, встановлений принаймні на одній з губок кліщів робота, кожна з яких зв'язана із приводом їх переміщення, підключеним до блока керування, і виконаний у вигляді ролика з інформаційними елементами, розташованими паралельно осі обертання ролика, джерела і приймача світла, зв'язаних з блоком керування, який відрізняється тим, що датчик проковзування оснащений...
Датчик для реєстрації проковзування предмета
Номер патенту: 24618
Опубліковано: 10.07.2007
Автори: Марковський Ігор Володимирович, Шишкін Олександр Сергійович, Кондратенко Володимир Юрійович, Чернов Сергій Костянтинович, Кондратенко Юрій Пантелійович
МПК: B25J 19/02
Мітки: датчик, проковзування, предмета, реєстрації
Формула / Реферат:
1. Датчик для реєстрації проковзування предмета, що містить корпус, в якому розміщено циліндричний ролик з можливістю повороту навколо своєї осі, магнітну систему на основі постійного магніта та магніточутливий елемент, який відрізняється тим, що ролик виконано у вигляді принаймні одного замкнутого тороїдального намагніченого магнітопроводу, який одночасно виконує роль постійного магніта магнітної системи, на твірну поверхню ролика нанесено...
Датчик для реєстрації проковзування з дискретним вихідним сигналом
Номер патенту: 27722
Опубліковано: 12.11.2007
Автори: Чернов Сергій Констянтинович, Шишкін Олександр Сергійович, Кондратенко Володимир Юрійович, Марковський Ігор Володимирович, Кондратенко Юрій Пантелійович
МПК: B25J 19/02
Мітки: дискретним, вихідним, реєстрації, датчик, проковзування, сигналом
Формула / Реферат:
Датчик для реєстрації проковзування з дискретним вихідним сигналом, що містить реєструвальний елемент, виконаний у вигляді принаймні одного конденсатора, та чутливий елемент, встановлений принаймні на одній з губок захватного пристрою робота, кожна з яких зв'язана із приводом їхнього переміщення, підключеним до блока керування, чутливий елемент виконаний у вигляді стрижня з наконечником, розташованого усередині основного паза конічної форми,...
Датчик робота для реєстрації проковзування деталі
Номер патенту: 30356
Опубліковано: 25.02.2008
Автори: Марковський Ігор Володимирович, Кондратенко Юрій Пантелійович, Чернов Сергій Констянтинович, Шишкін Олександр Сергійович, Кондратенко Володимир Юрійович
МПК: B25J 19/02
Мітки: датчик, деталі, робота, реєстрації, проковзування
Формула / Реферат:
Датчик робота для реєстрації проковзування деталі, що містить корпус, в якому розміщено магнітну систему, до складу якої входить циліндричний ролик, виконаний у вигляді принаймні одного замкнутого тороїдального намагніченого магнітопроводу з нанесеним на твірну поверхню ролика захисним пружним покриттям і з можливістю обертання ролика навколо своєї осі, та закріплений на корпусі магніточутливий елемент, до складу якого входить основний...
Попередній патент: Обчислювальний пристрій для ділення нечітких чисел
Наступний патент: Змащувальний склад
Випадковий патент: Спосіб вакуумно-плазмової обробки рідкого металу в потоці