Датчик для реєстрації проковзування з дискретним вихідним сигналом
Номер патенту: 27722
Опубліковано: 12.11.2007
Автори: Шишкін Олександр Сергійович, Чернов Сергій Констянтинович, Марковський Ігор Володимирович, Кондратенко Юрій Пантелійович, Кондратенко Володимир Юрійович



Формула / Реферат
Датчик для реєстрації проковзування з дискретним вихідним сигналом, що містить реєструвальний елемент, виконаний у вигляді принаймні одного конденсатора, та чутливий елемент, встановлений принаймні на одній з губок захватного пристрою робота, кожна з яких зв'язана із приводом їхнього переміщення, підключеним до блока керування, чутливий елемент виконаний у вигляді стрижня з наконечником, розташованого усередині основного паза конічної форми, наконечник закріплений на контактному кінці стрижня й підпружинений до нього, контактну поверхню наконечника виконано з еластичного матеріалу, а обкладки конденсатора розташовані на стрижні, що пружно зв'язаний з губкою, та на внутрішній поверхні конічного паза відповідної губки, який відрізняється тим, що в губці виконано додатковий паз конічної форми, розташований вершиною конічної поверхні співвісно з відповідною вершиною основного паза, стрижень пружно закріплено на губці в місці з'єднання основного й додаткового пазів, одна обкладка конденсатора розташована на частині стрижня, що розміщена у додатковому пазу, а інша - на внутрішній поверхні додаткового паза, при цьому обкладки конденсатора підключено до послідовно з'єднаних: перетворювача "ємність-напруга", елемента затримки, суматора та релейного елемента, причому вихід перетворювача "ємність-напруга" одночасно підключено до другого інвертованого входу суматора, а вихід релейного елемента підключено до блока керування приводом переміщення губок.
Текст
Датчик для реєстрації проковзування з дискретним вихідним сигналом, що містить реєструвальний елемент, виконаний у вигляді принаймні одного конденсатора, та чутливий елемент, встановлений принаймні на одній з губок захватного пристрою робота, кожна з яких зв'язана із приводом їхнього переміщення, підключеним до блока керування, чутливий елемент виконаний у вигляді стрижня з наконечником, розташованого U 2 (19) 1 3 захватного пристрою пов'язана із приводом їхнього переміщення, підключеним до блоку керування. Чутливий елемент виконаний у вигляді стрижня з наконечником, розташованого усередині основного паза конічної форми. Наконечник закріплений на контактному кінці стрижня й підпружинений до нього. Контактну поверхню наконечника виконано з еластичного матеріалу. Стрижень пружно зв'язаний з губкою. Обкладинки конденсатора розташовані на стрижні та на внутрішній поверхні конічного паза відповідної губки захватного пристрою та підключені послідовно до вимірювального блоку, детектору й аналого-цифрового перетворювача (АЦП). Вихід АЦП підключено до блоку керування приводом губок захватного пристрою. Такий датчик проковзування має наступні проблеми: - відсутність герметизації реєструвального елемента і його забруднення в процесі експлуатації, що приводить до погіршення параметрів реєструвального елемента, зокрема, його чутливості; - обмеження можливості зменшення розмірів паза, що контактує з об'єктом і зовнішнім середовищем, у зв'язку з необхідністю розміщення усередині паза реєструвального елемента і необхідністю забезпечення достатньої чутливості, що залежить від його габаритних розмірів; - обмеженість використання даного датчика в агресивних середовищах. В основу корисної моделі поставлено задачу удосконалення пристрою для реєстрації сигналу проковзування шляхом зміни: конструктивного виконання пазів, розміщення реєструвального елемента, а також зміни електронного блоку обробки сигналу датчика проковзування, що дозволить підвищити чутливість датчика проковзування і його надійність. Поставлена задача вирішується тим, що датчик для реєстрації проковзування з дискретним вихідним сигналом, що містить реєструвальний елемент, виконаний у вигляді, принаймні, одного конденсатора, та чутливий елемент, встановлений, принаймні, на одній з губок захватного пристрою робота, кожна з яких пов'язана із приводом їхнього переміщення, підключеним до блоку керування, чутливий елемент виконаний у вигляді стрижня з наконечником, розташованого усередині основного паза конічної форми, наконечник закріплений на контактному кінці стрижня й підпружинений до нього, контактну поверхню наконечника виконано з еластичного матеріалу, а обкладинки конденсатора розташовані на стрижні, що пружно зв'язаний з губкою, та на внутрішній поверхні конічного паза відповідної губки, згідно винаходу в губці виконано додатковий паз конічної форми, розташований вершиною конічної поверхні співвісно з відповідною вершиною основного пазу, стрижень пружно закріплено на губці в місці з'єднання основного й додаткового пазів, одна обкладинка конденсатора розташована на частині стрижня, що розміщена у додатковому пазу, а інша - на внутрішній поверхні додаткового паза, 27722 4 обкладки конденсатора підключено до послідовно з'єднаних: перетворювача «ємність-напруга», елементу затримки, суматора та релейного елементу, причому вихід перетворювача «ємністьнапруга» одночасно підключено до другого інвертованого входу суматора, а вихід релейного елементу підключено до блоку керування приводом переміщення губок. У зв'язку з розміщенням реєструвального елемента у додатковому пазу вирішується проблема герметизації реєструвального елемента шляхом герметичного виконання пружного кріплення стрижня датчика проковзування на губці захватного пристрою в місці з'єднання основного й додаткового пазів. При цьому також повністю вирішується проблема виключення забруднення реєструвального елемента у процесі експлуатації й підвищується його перешкодостійкість за рахунок зменшення впливу зовнішнього середовища на реєструвальний елемент. Розширюється також сфера застосування датчика проковзування при його використанні в агресивних середовищах та в умовах підвищеної вологості. Реєструвальний елемент підключений до електронного блоку, що складається з декількох елементів і на виході якого формується дискретний сигнал (0 або 1), що відповідає наявності (1) або відсутності (0) проковзування. Це виключає необхідність використання додаткового електронного блоку, що сигналізує про наявність або відсутність сигналу проковзування. Конструкція датчика також передбачає виконання реєструвального елемента у вигляді двох, або більше конденсаторів, що дозволить реєструвати не тільки наявність проковзування деталі в захватному пристрої, але й напрям її проковзування. Водночас, розміщення реєструвального елементу у додатковому пазу дозволяє збільшити площу поверхні для розміщення реєструвального елемента, при меншому розмірі основного паза, що призводить до збільшення чутливості датчика. На Фіг.1 представлено схему конструктивного виконання датчика проковзування з дискретним вихідним сигналом у поздовжньому розрізі. На Фіг.2 представлено схему конструктивного виконання датчика проковзування з дискретним вихідним сигналом у поперечному розрізі з електронними блоками обробки сигналів чутливого елементу. Датчик розміщується принаймні на одній з губок захватного пристрою. В основному 1 і додатковому 2 пазах конічної форми, виконаних у губці 3 захватного пристрою, розташовано стрижень 4. На одному кінці стрижня 4 розміщено наконечник 5, що безпосередньо контактує з деталлю. Робоча поверхня 6 наконечника 5 виконана з еластичного матеріалу, а сам наконечник 5 з'єднано зі стрижнем 4 за допомогою пружини 7. За допомогою пружного елемента 8 стрижень 4 закріплений на губці 3 захватного пристрою. У додатковому пазу 2 розташований реєструвальний елемент, що складається з обкладинки конденсатора 9, розташованої на поверхні стрижня 4, та односекційної або 5 багатосекційної (наприклад чотирьохсекційної, Фіг.2) обкладинки 10, розміщеної на внутрішній поверхні паза 2. Обкладинки отриманих конденсаторів підключено до відповідного перетворювача «ємність-напруга» 11, вихід якого поєднано зі входом елемента затримки 12 та з інвертованим (від'ємним) входом суматора 13. Вихід елемента затримки 12 підключено до прямого (додатного) входу суматора 13. Вихід відповідного суматора 13 поєднано з входом релейного елементу 14, вихід який підключено до приводу керування губками захватного пристрою. В якості перетворювача «ємність-напруга» 11 може бути використаний стандартний перетворювач типу ХЕ2004 фірми Xemics або стандартні апаратні та програмно-апаратні схеми перетворювання ємності в напругу. Елемент затримки 12 реалізується стандартними електронними схемами або на базі мікроконтролерів (наприклад, фірми Microchip, Atmel та ін.). Суматор 13 може бути виконаний у вигляді компаратора. В якості релейного елемента може бути використане оптореле. Запропонований пристрій працює таким чином. У початковому стані наконечник 5 за допомогою пружини 7 утримується над поверхнею губки 3, а пружний елемент 8 утримує стрижень 4 у такому положенні, що його поздовжня вісь перпендикулярна поверхні губки й збігається з віссю MN стрижня 4. При захоплюванні деталі її поверхня приходить у зіткнення з наконечником 5, пружина 7 стискується й наконечник 5 утоплюється в пазу 2. Величина стискального зусилля при цьому відповідає попередньо визначеному мінімальному значенню, що виключає деформацію, або пошкодження деталі. Якщо при спробному русі робота деталь починає проковзувати при невідповідності величини стискального зусилля масі деталі, то внаслідок сил тертя між поверхнею деталі й робочою поверхнею б стрижень 4 відхиляється по ходу проковзування деталі на кут а. При цьому поздовжня вісь стрижня 4 співпадає з віссю M'N'. Взаємне переміщення обкладинок 9 та 10 одна відносно іншої призводить до зніми величини отриманих ємностей. При цьому, в залежності від напряму та величини переміщення стрижня 4 змінюються значення ємностей між обкладинками 9 та 10 конденсаторів. При зміні значень ємностей змінюється величина напруги на виході відповідного перетворювача «ємність-напруга» 11. При цьому, попереднє значення напруги, що зберігається елементом затримки 12 і відповідає значенню ємності перед спробним рухом робота, порівнюється з поточним значенням напруги, що відповідає значенню ємності після спробного руху робота, за допомогою суматора 13. Отже, якщо сигнал на виході суматора відрізняється від нуля, то це означає що ємність конденсаторів змінилась внаслідок проковзування деталі в захватному пристрої. При цьому сигнал з виходу суматора 13 надходить до входу релейного елемента 14, на виході якого формується дискретний сигнал (логічна 1), що відповідає наявності 27722 6 проковзування. Оскільки вихід релейного елемента 14 підключено до приводу керування губками захватного пристрою, то в такому випадку за допомогою привода губок збільшується стискальне зусилля на наперед задану дискретну величину та роботом здійснюється наступний спробний рух. Якщо після відповідного спробного руху сигнал на виході суматора дорівнює нулю, то це означає, що в порівнянні з попереднім спробним рухом ємність конденсаторів залишилась незмінною і проковзування деталі в захватному пристрої не було. При цьому сигнал з виходу суматора 13 надходить до входу релейного елемента 14, на виході якого формується дискретний сигнал (логічний 0), що відповідає відсутності проковзування. При цьому величина стискального зусилля буде відповідати масі деталі (наперед невідомій), що дає можливість роботу здійснювати в подальшому відповідні маніпуляційні операції з деталлю. Позитивний ефект проявляється в тому, що в порівнянні з [а. с СРСР №1252168], даний пристрій дозволяє збільшити чутливість датчика при незмінному розмірі основного паза за рахунок розміщення реєструвального елемента в додатковому пазу. При співвідношенні довжин частин стрижня в основному й додатковому пазах, L осн 1 наприклад, = , збільшується площа L дод 5 поверхні, на якій розміщено обкладинки конденсатора реєструвального елемента. Це призводить до збільшення чутливості запропонованого датчика приблизно в 5 разів у порівнянні з а. с. СРСР №1252168. Водночас, розміщення реєструвального елемента в додатковому пазу дозволяє вирішити проблему герметизації реєструвального елемента і дає можливість використовувати даний датчик в агресивних середовищах. Реєструвальний елемент підключено до багатокомпонентної електронної схеми, на виході якої формується дискретний сигнал (0 або 1), що відповідає наявності (логічна 1) або відсутності (логічний 0) проковзування. Це дозволяє розширити сферу застосування датчика та виключає необхідність використання додаткового електронного блоку, що сигналізував би про наявність або відсутність сигналу проковзування. В свою чергу це також зменшує вірогідність підвищення похибки вимірювань та зменшує масо-габаритні показники. 7 27722 8
ДивитисяДодаткова інформація
Назва патенту англійськоюSensor for recording slippage with discrete output signal
Автори англійськоюKondratenko Yurii Panteliiovych, Shyshkin Oleksandr Serhiiovych, Kondratenko Volodymyr Yuriiovych, Markovskyi Ihor Volodymyrovych, Chernov Serhii Konstiantynovych
Назва патенту російськоюДатчик для регистрации проскальзывания с дискретным выходным сигналом
Автори російськоюКондратенко Юрий Пантелеевич, Шишкин Александр Сергеевич, Кондратенко Владимир Юрьевич, Марковский Игорь Владимирович, Чернов Сергей Константинович
МПК / Мітки
МПК: B25J 19/02
Мітки: проковзування, сигналом, вихідним, дискретним, реєстрації, датчик
Код посилання
<a href="https://ua.patents.su/4-27722-datchik-dlya-reehstraci-prokovzuvannya-z-diskretnim-vikhidnim-signalom.html" target="_blank" rel="follow" title="База патентів України">Датчик для реєстрації проковзування з дискретним вихідним сигналом</a>
Датчик для реєстрації проковзування предмета
Номер патенту: 24618
Опубліковано: 10.07.2007
Автори: Чернов Сергій Костянтинович, Шишкін Олександр Сергійович, Кондратенко Володимир Юрійович, Кондратенко Юрій Пантелійович, Марковський Ігор Володимирович
МПК: B25J 19/02
Мітки: реєстрації, предмета, проковзування, датчик
Формула / Реферат:
1. Датчик для реєстрації проковзування предмета, що містить корпус, в якому розміщено циліндричний ролик з можливістю повороту навколо своєї осі, магнітну систему на основі постійного магніта та магніточутливий елемент, який відрізняється тим, що ролик виконано у вигляді принаймні одного замкнутого тороїдального намагніченого магнітопроводу, який одночасно виконує роль постійного магніта магнітної системи, на твірну поверхню ролика нанесено...
Пристрій для реєстрації сигналу проковзування
Номер патенту: 79155
Опубліковано: 25.05.2007
Автори: Шишкін Олександр Сергійович, Кондратенко Юрій Пантелійович, Кондратенко Володимир Юрійович
МПК: B25J 13/08, B25J 19/02
Мітки: проковзування, сигналу, пристрій, реєстрації
Формула / Реферат:
1. Пристрій для реєстрації сигналу проковзування, що містить датчик проковзування, встановлений принаймні на одній з губок схвата робота, кожна з яких зв'язана із приводом їхнього переміщення, підключеним до блока керування, і виконаний у вигляді розташованого усередині основного паза конічної форми стрижня й наконечника, розташованого на одному кінці стрижня й підпружиненого до нього, причому стрижень пружно зв'язаний з губкою, а робочу...
Датчик проковзування адаптивного робота
Номер патенту: 15635
Опубліковано: 17.07.2006
Автори: Кондратенко Володимир Юрійович, Крутських Сергій Владиславович, Кондратенко Юрій Пантелійович
МПК: B25J 19/02
Мітки: робота, датчик, адаптивного, проковзування
Формула / Реферат:
Датчик проковзування адаптивного робота, що містить корпус, в якому встановлено чутливий елемент, виконаний у вигляді циліндричного ролика з можливістю повороту навколо своєї осі, робоча поверхня якого виконана з еластичного матеріалу, і систему реєстрації сигналу проковзування, який відрізняється тим, що система реєстрації сигналу проковзування виконана у вигляді двосекційного конденсатора, дві нерухомі обкладки якого через діелектрик...
Пристрій для реєстрації сигналу проковзування
Номер патенту: 14566
Опубліковано: 15.05.2006
Автори: Шишкін Олександр Сергійович, Кондратенко Володимир Юрійович, Кондратенко Юрій Пантелійович
МПК: B25J 19/02
Мітки: проковзування, пристрій, реєстрації, сигналу
Формула / Реферат:
Пристрій для реєстрації сигналу проковзування, що містить датчик проковзування, встановлений принаймні на одній з губок кліщів робота, кожна з яких зв'язана із приводом їх переміщення, підключеним до блока керування, і виконаний у вигляді ролика з інформаційними елементами, розташованими паралельно осі обертання ролика, джерела і приймача світла, зв'язаних з блоком керування, який відрізняється тим, що датчик проковзування оснащений...
Вимірювальний перетворювач з частотним вихідним сигналом
Номер патенту: 11851
Опубліковано: 25.12.1996
Автори: Мокренко Петро Володимирович, Мичуда Зиновій Романович, Бучма Ігор Михайлович
МПК: H03M 1/50
Мітки: частотним, вихідним, сигналом, вимірювальний, перетворювач
Формула / Реферат:
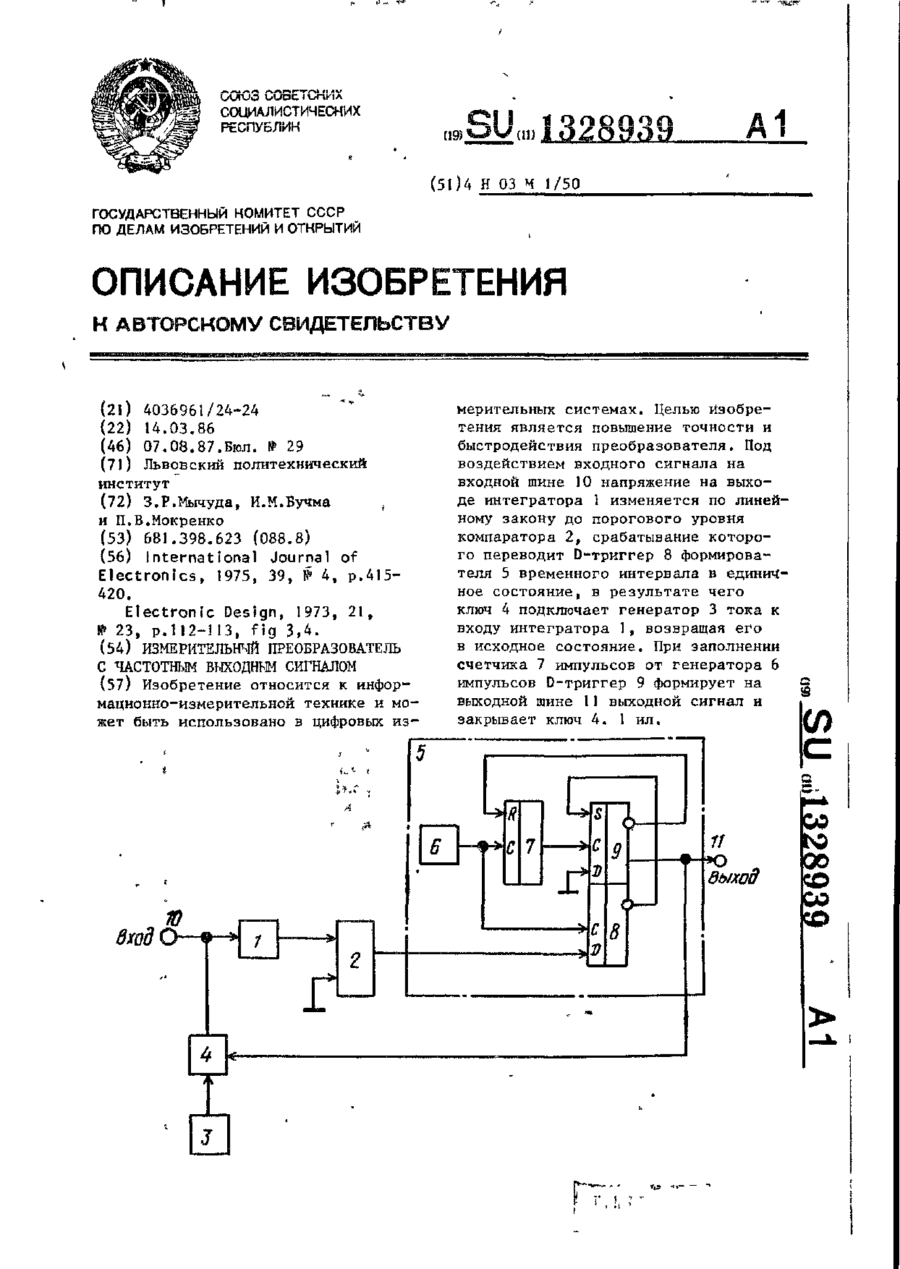
Измерительный преобразователь с частотным выходным сигналом, содержащий компаратор, первый вход которого является шиной нулевого потенциала, а второй вход соединен с выходом интегратора, вход которого является входной шиной и соединен с выходом ключа, информационный вход которого подключен к выходу генератора тока, а управляющий вход является выходной шиной, и формирователь временного интервала, выполненный на генераторе импульсов и...
Попередній патент: Спосіб прискореного виявлення helicobacter pylori в слизовій оболонці шлунка у патолого-анатомічному матеріалі
Наступний патент: 7-b-гідрокси-g-(2ў,4ў-дихлорофенокси)-пропіл-8-n-(nў-b-гідроксіетил)піперазино-3-метилксантин, який виявляє гіпохолестеринемічну дію
Випадковий патент: Курильний виріб, який має зовнішню обгортку з вирізом