Маніпулятор інженера м.в.лєонєнко
Формула / Реферат
1. Манипулятор, содержащий установленный на основании исполнительный орган с приводами его перемещения, каждый из которых включает двигатель, кинематическую цепь для связи двигателя с исполнительным органом, упругий элемент и систему управления, отличающийся тем, что, с целью расширения технологических возможностей за счет обеспечения возможности позиционирования исполнительного органа в любой точке рабочей зоны манипулятора и повышения надежности его работы, каждый из приводов снабжен связанными с системой управления двумя датчиками угловых перемещений, один из которых установлен между выходным валом кинематической цепи и основанием, а другой - между ротором и статором двигателя, и четырьмя управляемыми муфтами, две из которых связывают ротор соответственно с основанием и с выходным валом кинематической цепи, а две другие связывают статор также соответственно с основанием и с выходным валом кинематической цепи, при этом упругий элемент закреплен между статором и ротором двигателя, а двигатель установлен на основании с возможностью вращения статора и ротора вокруг их общей оси.
2. Манипулятор по п. 1, отличающийся тем, что каждый привод снабжен по крайней мере двумя дополнительными управляемыми муфтами и двумя маховиками, при этом одна из дополнительных муфт установлена между ротором двигателя и одним из маховиков, а другая - между статором двигателя и другим маховиком.
3. Манипулятор по пп. 1 и 2, отличающийся тем, что каждый привод содержит соединенные с системой управления два датчика угловой скорости, один из которых установлен на выходном валу кинематической цепи, а другой - между ротором и статором двигателя.
Текст
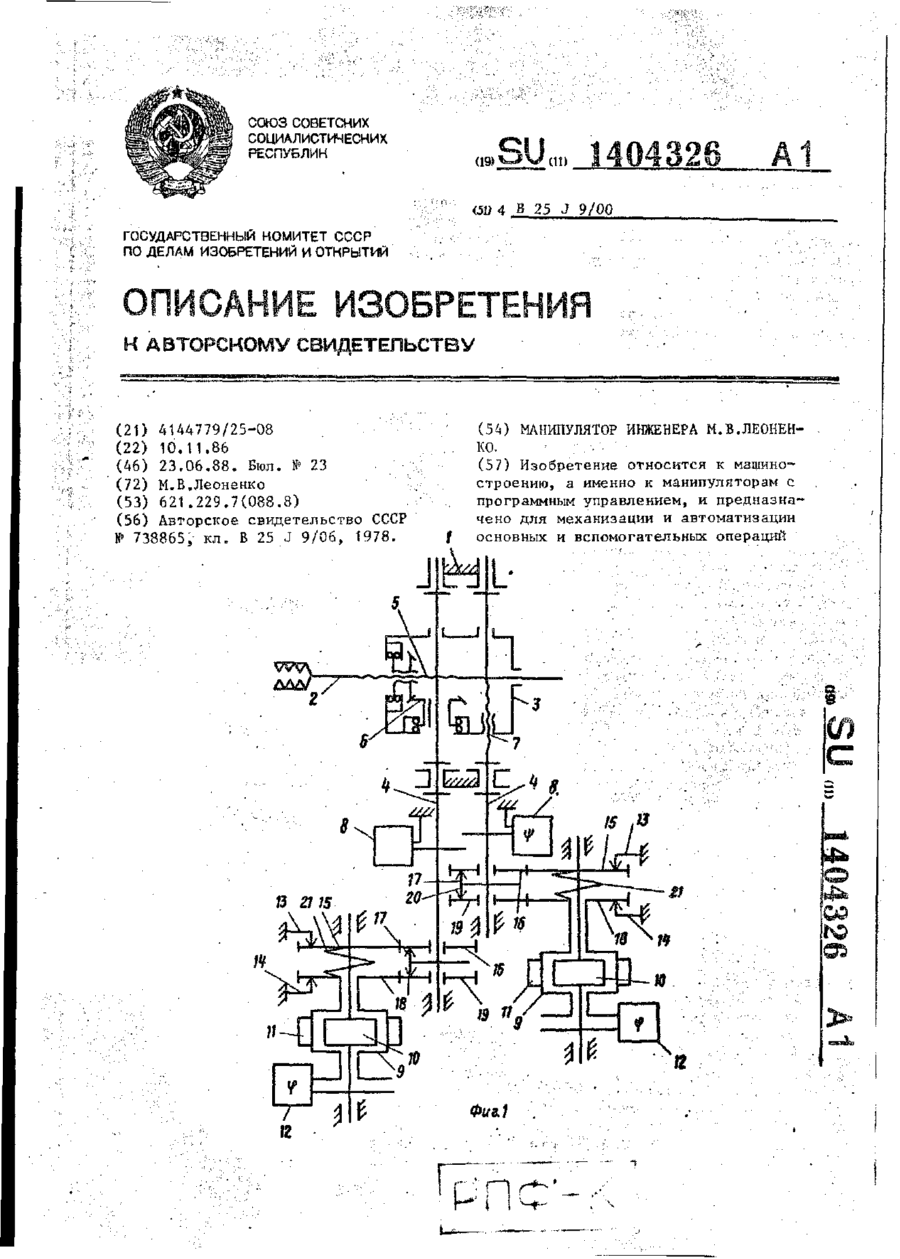
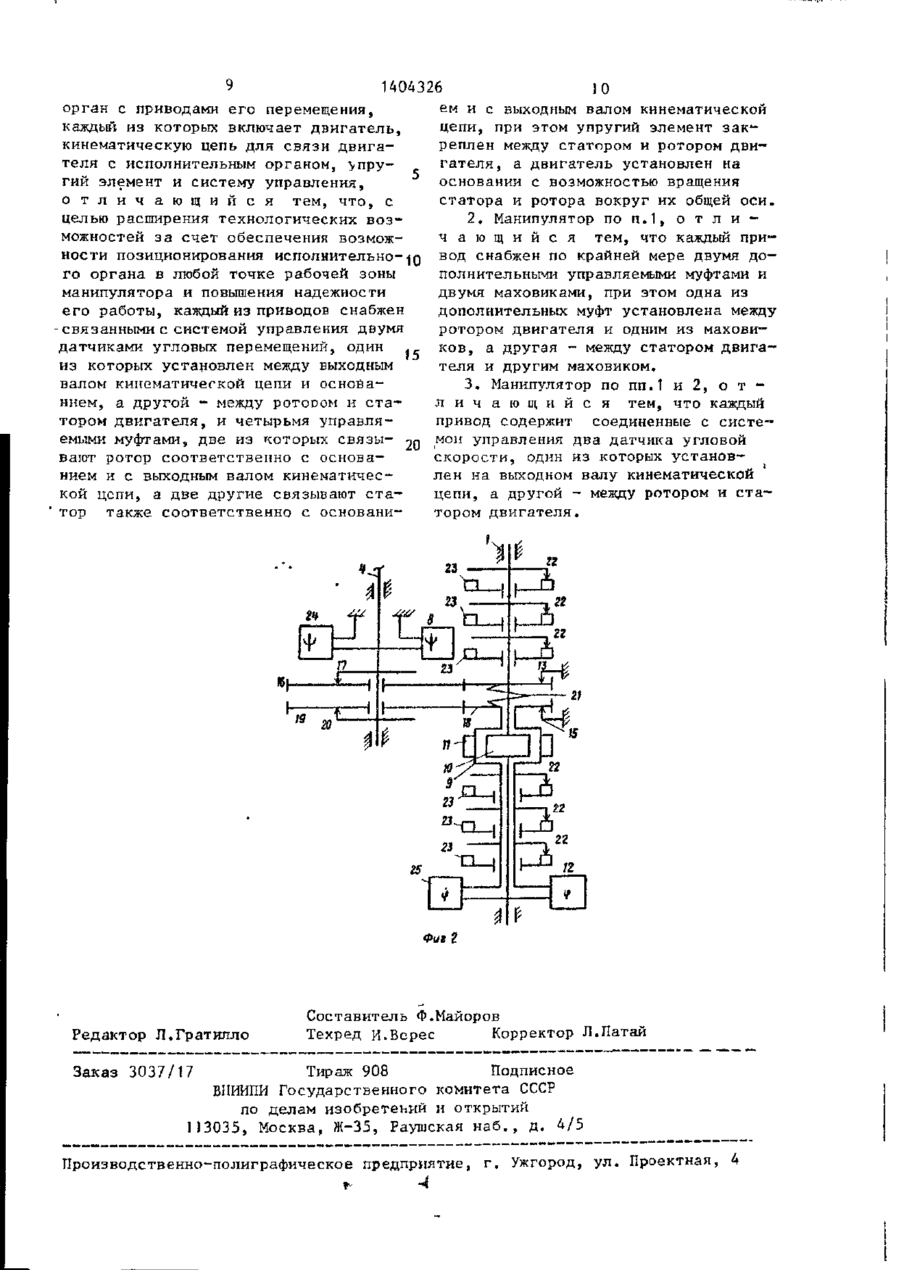
Изобретение относится к машиностроению, а именно к манипуляторам с программным управлением, и предназначено для механизации и автоматизации основных и вспомогательных операций 1404326 в промышленности. Целью изобретения является расширение технологических возможностей за счет обеспечения возможности позиционирования исполнительного органа в любой точке рабочей зоны манипулятора, и повышение надежности его работы. В зависимости от комбинации включения управляемых муфт 13, 14, 17 и 20 происходит вращение выходного вала кинематической цепи, связывающей двигатель каждого из приводов с исполнительным органом, при этом вращающий момент может передаваться как от ротора 10 двигателя, так и статора 11, которые связаны между собой пружиной кручения 21. Перемещение исполнительного органа в любую точку рабочей зоны происходит за одно колебательное движение ротора, 10 или статора 11 под действием пружины кручения 21, при этом сам двигатель служит для покрытия потерь. , > • 1 Для регулирования скорости перемеще- * ния исполнительного органа в манипуляторе могут быть использованы маховики, связанные с приводом через дополнительные управляемые муфты. 2 з.п. ф-лы, 2 ил. 1 Изобретение относится к машино-* строению, а именно к манипуляторам с программным управлением, и предназначено для механизации и автоматизации 5 основных и вспомогательных операций в промышленности. Целью изобретения является расширение технологических возможностей за счет обеспечения возможности позици- 10 онирования исполнительного органа в любой точке рабочей зоны манипулятора и повышение надежности его работы. На фиг.1 изображена кинематическая схема манипулятора; на фиг.2 - схема J5 части кинематической цепи с датчиками угловой скорости и маховиками. Манипулятор содержит смонтированные на основании 1 звенья 2 и 3 исполнительного органа. Звено 2 связано с 20 выходным валом 4 одного из приводов перемещения исполнительного органа через передачу 5 и 6. Звено 3 связано с аналогичным выходным валом 4 второго привода через передачу 7. Первый 25 привод служит для горизонтального перемещения звена 2, второй - для вертикального перемещения звена 3. У каждого привода между выходным валом 4 и основанием 1 установлен датчик 8 30 угловых перемещений. Кроме того, каждый из приводов включает двигатель 9, установленный на основании с возможностью независимого вращения ротора 10 и статора 11 вокруг их общей оси, 35 Между ротором 10 и статором 11 уста новлен датчик 12 угловых перемещений. Между ротором 10 и основанием 1 установлена управляемая муфта 13, между статором 11 и основанием 1 - управляемая муфта 14. Ротор 10 связан с выходным валом* 4 посредством зубчатых колес 15 и 16 и управляемой муфты 17. Статор 11 связан с выходным валом 4 посредством зубчатых колес 18 и 19 и управляемой муфты 20. Между ротором 10 и статором 11 установлена пружина 21 кручения. Датчики 8 и 12, управляемые муфты 13, 14, 17 и 20, двигатель 9 связаны с системой управления (не показана) . Устройство может также содержать дополнительные управляющие муфты 22, соединяющие маховики 23 с ротором 10 и статором 11 двигателей, и, кроме того, датчики 24 и 25 угловых скоростей, установленные соответственно между выходным валом 4 и основанием 1 и между ротором 10 и статором 11, Манипулятор работает следующим образом, В исходном положении ротор 10 повернут относительно статора 11, на« пример по часовой стрелке на угол ц - q , , от свободного состояния пру> > жины 21 кручения. При включении системы управления датчики 8 и 12 угловых перемещений вырабатывают электрические сигналы, которые соответствуют измеренным датчиками значениям углов 1404326 звено 2. В итоге получаются углы пе$ ~ Vt ) f Ч ! • Сигналы (? и с посту+ р ремещения q = -if,, у = у3 , т.е. > пают с датчиков в систему управления. звено 2 переместится в обратном напВозможно несколько способов управравлении на такую же величину, как ления устройством. и в первом случае. Двигатель 9 и в По первому способу, если от систеэтом случае используется только для мы управления поступят управляющие восполнения потерь энергии.j сигналы и выключить муфты 20 и 13, то пружина 21 кручения начнет вращать По третьему способу, если в манирасфиксированный ротор 10 против ча- 10 пулятор, находящийся в исходном соссовой стрелки. Вращение от ротора 10 тоянии С с = t , и ф = ср, ) , от систер p передается через зубчатые колеса 15 мы управления поступят управляющие и 16 и муфту 17 на выходной вал 4. сигналы и выключат муфты 20 и 14, то Выходной вал 4 вращается по часовой пружина 21 кручения начнет вращать стрелке и через передачи 6 и 5 пере- 15 расфиксированный статор 11 по часовой мещает в горизонтальном направлении, стрелке и приведет в движение связаннапример вправо, звено 2. Кроме того, ную с ним кинематическую цепь с элеодновременно с выключением муфт 20 и ментами 18 и 19. Одновременно система 13 система управления включает двигауправления включает двигатель 9 таким тель 9 таким образом, что его крутя- 20 образом, что его крутящий момент совщии момент совпадает с направлением падает с направлением вращения статовращения ротора 10. Пружина раскручира. В момент, когда значение сигнавается до свободного состояния, т.е. ла с станет равно Ц = ср, М, (М - нер с = 0, разогнав связанную с ней кир который коэффициент, причем 0 < М & 1), нематическую цепь с элементами 10, 25 сигнал системы управления выключит 15, 16, 17, 4, 6, 5 и 2 до максимальмуфту 13. Пружина 21 начнет вращать ной скорости. Затем эта кинематичесрасфиксированный ротор 10 против чакая цепь, двигаясь по инерции, закрусовой стрелки и приводит в движение чивает пружину 21 на угол - 0 до с = — с , М, кинематическая цепь с элементами 10, 15, 16, ятниковое движение и в момент вклю17, 4, 6, 5 и 2 получает от пружины чения муфт, т.е. фиксации кинемати21 такой же импульс силы, действуюческой цепи, скорости перемещений щий в обратном направлении. В момент, всех звеньев кинематической цепи рав40 когда наступит равенство С = -ср,-М, р ны нулю и, следовательно, нет необскорости перемещений всех элементов ходимости гасить кинетическую энергию этой кинематической цепи будут равны кинематической цепи. Таким образом, нулю, и в этот же момент сигнал систеротор 10, выходной вал 4 и звено 2 мы управления включит муфту 13. Ротор зафиксированы относительно основания с углами поворота С = -Ср, и ( f 20 из выходной вал 4. Выходной вал 4 тор 11 и связанная с ним кинематичесвращается против часовой стрелки и кая цепь получают от пружины 21 тасоответственно перемещается влево = 3 1404326 кой же импульс силы, действующий в обратном направлении. В момент, когда угол С = -Ц 1 ,, скорость движения с т а р тора будет равна нулю и в этот же мо- 5 мент сигналы системы управления включают муфты 14 и 20 и выключают д в и г а тель 9. Двигатель 9 используется т о л ь ко для восполнения потерь энергии. В итоге получают следующие углы пере-10 мещения С = Cpf ^ ц = у . р Перемещение исполнительного звена 2 и соответствующее ему угловое п е р е мещение су4 — Cf?t выходного вала 4 з а висят от соотношения момента инерции f5 кинематической цепи с элементами 10, 15, 16, 17, 4, 6, 5 и 2, приведенийго к ротору, и момента инерции кинематической цепи с элементами 11, 18 и 19, приведенного к статору, а также 20 от величины М. Изменяя М в пределах 0 =q>, и V =V t ) , от системы управления поступают управляющие сигналы и выключают муфты 13 и 17, включают 30 д в и г а т е л ь 9 согласно с направлением вращения р о т о р а . Затем в момент, к о г да значение угла ср станет равно ср = = {о • М, сигнал системы управления выключит муфту 14. В момент, когда значение сигнала ср = -ср-М, сигнал с и с т е - 35 мы управления включает муфту 14. В момент, когда значение угла ср равно Ч = ~Я\> сигналы системы управления включат муфты 13 и 17 и выключат д в и г а т е л ь 9 . В итоге получены следующие углы перемещения'ср = - Cf, и су = с у 5 . В этом случае происходят процессы, аналогичные процессам в предыдущем случае, только перемещение который импульс силы. Далее, когда значение угла C изменяется отс^ - 0 f До C = -q>(-M, кинематическая цепь с f элементами 11, 18 и 19 получит от пружины 21 такой же импульс силы, действующий в обратном направлении. Б момент, когда значение угла q > стан е т равным С = -срЕ*М, скорости перер мещений всех звеньев кинематической цепи с элементами 11, 18 и 19 равны нулю и в этот же момент сигнал системы управления включит муфту 14. Статор 11 и кинематическая цепь с э л е ментами 18 и 19 зафиксированы относительно основания. Ротор 10 продолжает вращаться против часовой стрелки, закручивая пружину 21 от угла
ДивитисяДодаткова інформація
Назва патенту англійськоюManipulator of engineer leonenko
Автори англійськоюLeonenko Mykhailo Vasyliovych
Назва патенту російськоюStarwriterманипулятор инженера м.в.леоненко
Автори російськоюЛеоненко Михаил Васильевич
МПК / Мітки
МПК: B25J 9/00
Мітки: інженера, м.в.лєонєнко, маніпулятор
Код посилання
<a href="https://ua.patents.su/6-9003-manipulyator-inzhenera-mvlehonehnko.html" target="_blank" rel="follow" title="База патентів України">Маніпулятор інженера м.в.лєонєнко</a>
Маніпулятор
Номер патенту: 188
Опубліковано: 30.04.1993
Автори: Шумейко Дмитро Іванович, Мілушин Тимофій Тимофійович, Кравчун Степан Іванович
МПК: B25J 9/00
Мітки: маніпулятор
Формула / Реферат:
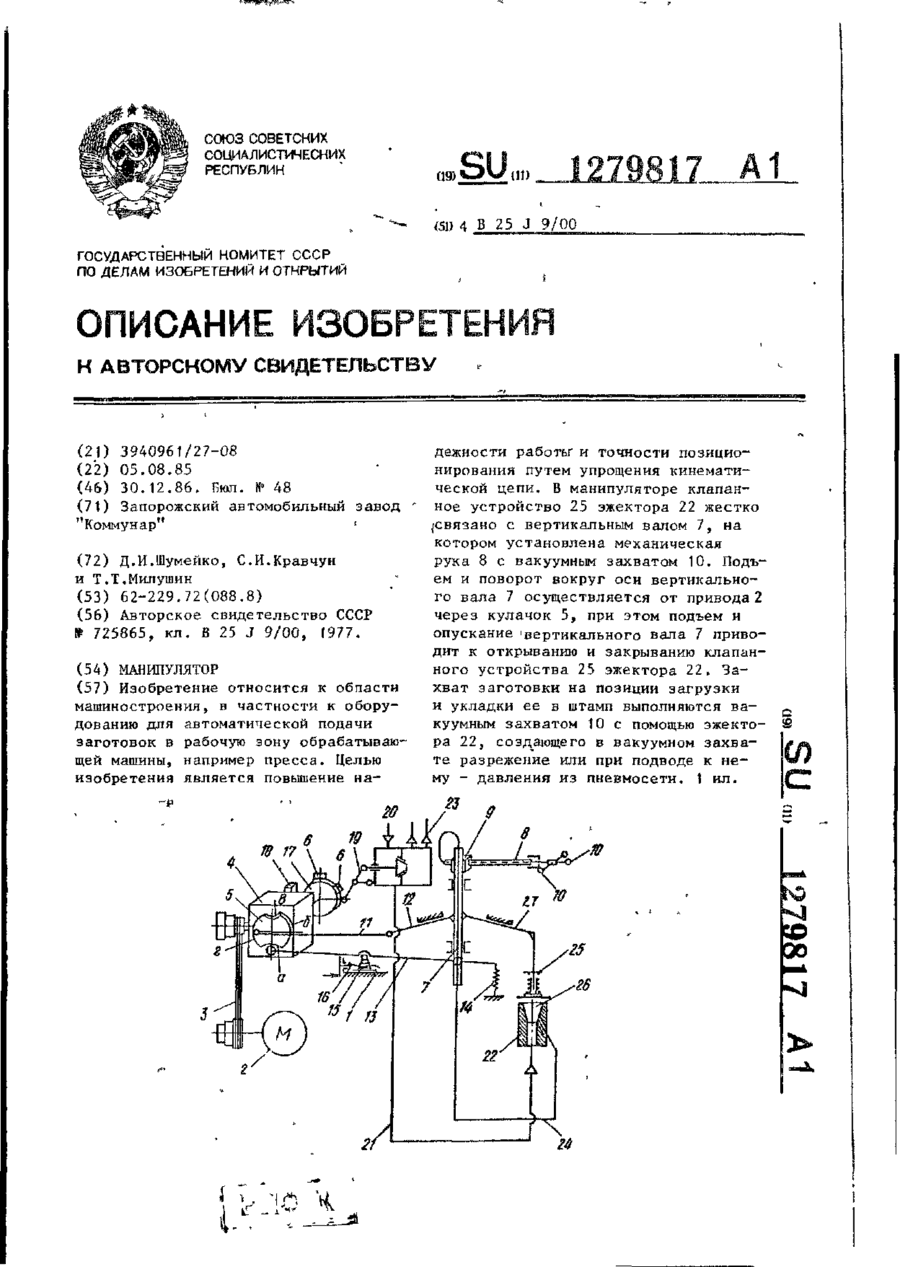
Формула изобретенияМанипулятор, содержащий механическую руку с пневматическими захватными органами, установленную на вертикальном валу, связанном посредством рычажной системы, с приводом ее подъема и поворота, кулачки, закрепленные на валу редуктора и взаимодействующие с пневмоклапаном, связанным трубопроводом с пневматическими механизмами, и эжектор с клапанным устройством, связанный трубопроводом с пневматическими захватными...
Маніпулятор
Номер патенту: 6962
Опубліковано: 31.03.1995
Автори: Свистун Віталій Леонідович, Саленко Світлана Василівна, Валюх Володимир Федорович
МПК: B25J 9/02, B25J 11/00
Мітки: маніпулятор
Формула / Реферат:
(57) 1. Манипулятор, содержащий основание, на котором смонтирован вал с механической рукой, в корпусе которой размещен приводной захват, имеющий индивидуальный корпус, а также механизмы подъема и поворота механической руки, отличающийся тем, что он снабжен механизмом автоматической ориентации захвата, выполненным в виде регулируемой тяги, кольца с рычагом и рычага, жестко связанного с корпусом захвата, причем оба рычага шарнирно соединены...
Маніпулятор для внутрішнього контролю циліндричних резервуарів
Номер патенту: 6087
Опубліковано: 29.12.1994
Автори: Райнер Бауер, Ханс Кастль
МПК: B25J 9/02, F22B 37/00, B25J 11/00, G21C 17/003
Мітки: циліндричних, контролю, маніпулятор, внутрішнього, резервуарів
Формула / Реферат:
1. Манипулятор для внутреннего контроля цилиндрических резервуаров, содержащий трубообразную мачту с расположенными на ее нижнем конце пятой и на ее верхнем конце центровочным подшипниковым узлом, выполненный с возможностью перемещения вдоль мачты и охватывающий мачту суппорт для установки на нем контрольного, измерительного или смотрового устройства и связанный с центровочным подшипниковым узлом узел привода поднятия и опускания суппорта,...
Привод обертання колісної пари для колесо-фрезерувального верстату
Номер патенту: 8964
Опубліковано: 30.09.1996
Автори: Безкровний Анатолій Іванович, Меншун Іван Степанович
МПК: B23B 5/00
Мітки: обертання, колесо-фрезерувального, пари, привод, колісної, верстату
Формула / Реферат:
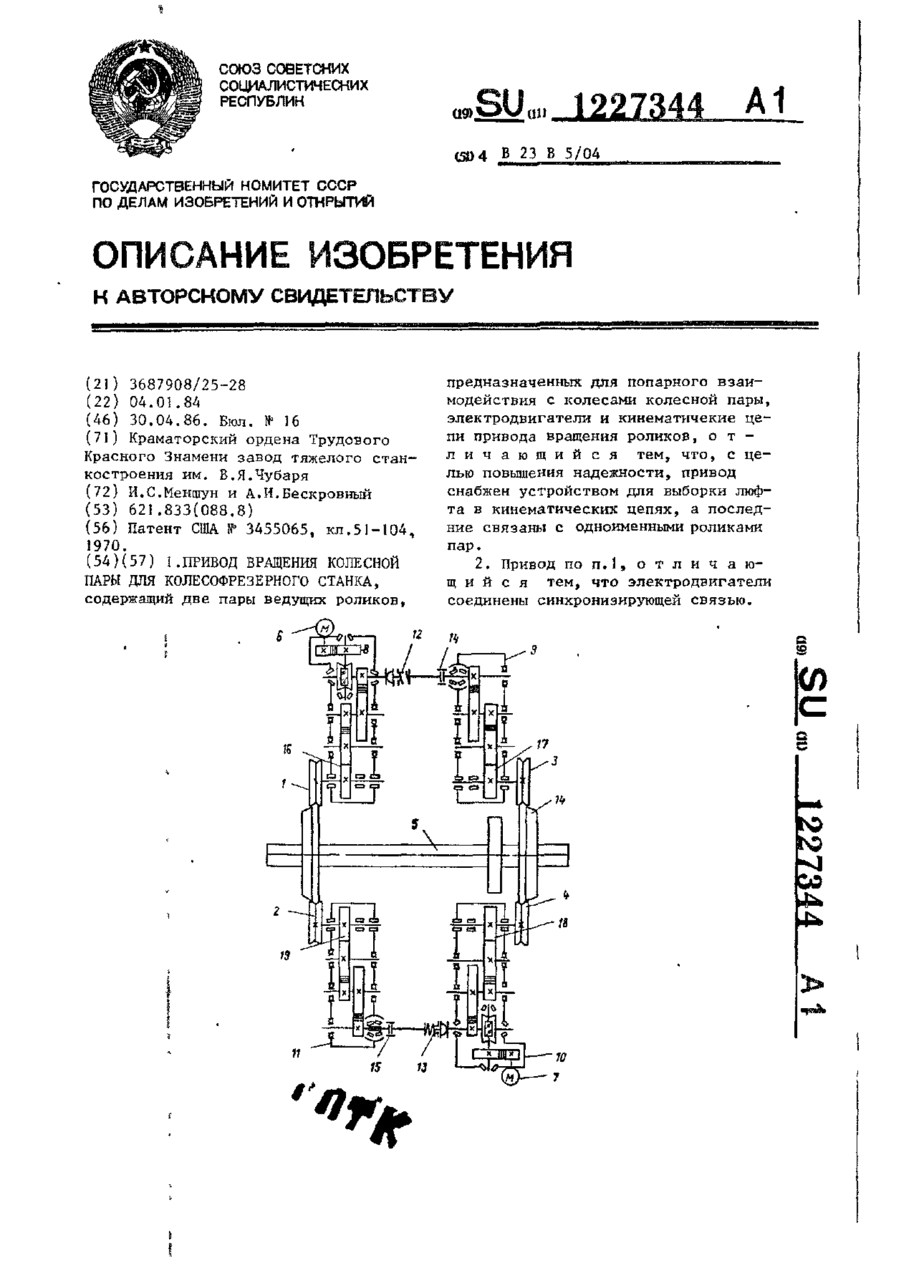
1. Привод вращения колесной пары для колесофрезерного станка, содержащий две пары ведущих роликов, предназначенных для попарного взаимодействия с колесами колесной пары, электродвигатели и кинематические цепи привода вращения роликов, отличающийся тем, что, с целью повышения надежности, привод снабжен устройством для выборки люфта в кинематических цепях, а последние связаны с одноименными роликами пар.2. Привод по п. 1,...
Регулятор тиску прямої дії “до себе”
Номер патенту: 7779
Опубліковано: 26.12.1995
Автор: Фрейдін Боріс Нісановіч
МПК: G05D 16/06
Мітки: себе, тиску, прямої, дії, до, регулятор
Формула / Реферат:
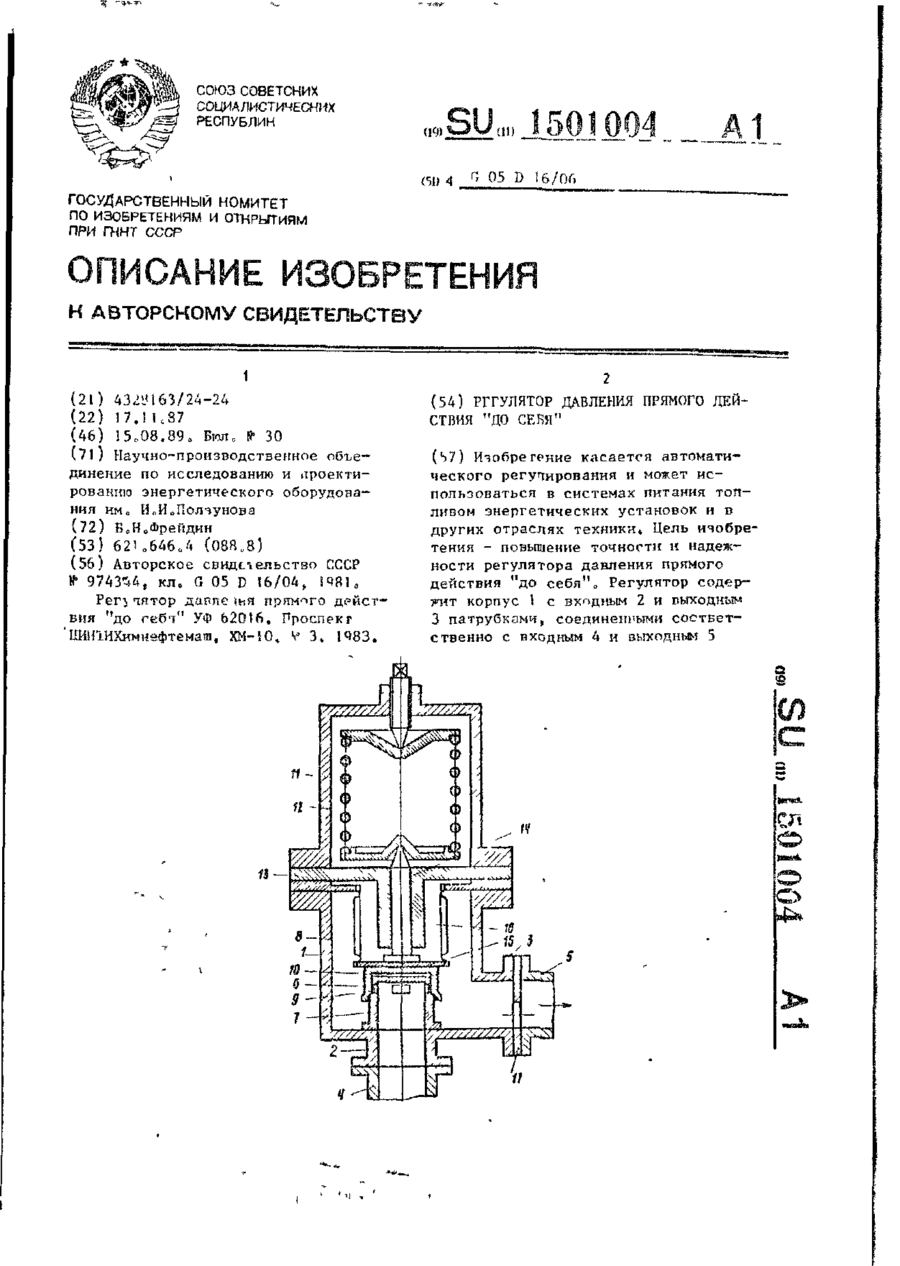
1. Регулятор давления прямого действия "до себя", содержащий корпус с входным и выходным патрубками, соединенными соответственно с входным и выходным трубопроводами, клапан, расположенный в промежуточной полости корпуса, которая соединена с входным патрубком через седло клапана, а также с выходным патрубком, пружину задания, расположенную в полости корпуса, которая отделена от промежуточной полости перегородкой, причем пружина...
Попередній патент: Мульдозавалочна машина
Наступний патент: Сталеплавильна піч
Випадковий патент: Склад житньо-пшеничного хліба зі щавнатом