Спосіб керування рухом промислового робота
Номер патенту: 101651
Опубліковано: 25.04.2013
Автори: Ловейкін Вячеслав Сергійович, Ромасевич Юрій Олександрович

Формула / Реферат
Спосіб керування рухом промислового робота, при якому розгін і гальмування ланки робота здійснюють при максимальному приводному моменті, який відрізняється тим, що розгін і гальмування ланки робота здійснюють за наступним дискретним законом, який описується поліноміальною залежністю від аргументу часу
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]() ,
, ![]() ,
,
де ![]() - дискретна величина кутової швидкості вала приводу ланки для режиму розгону;
- дискретна величина кутової швидкості вала приводу ланки для режиму розгону; ![]() - значення дискретного часу, яке відповідає i-тій точці масиву кутових швидкостей;
- значення дискретного часу, яке відповідає i-тій точці масиву кутових швидкостей;
![]() - номер дискретного значення кутової швидкості приводу в масиві значень швидкостей;
- номер дискретного значення кутової швидкості приводу в масиві значень швидкостей; ![]() - максимальне значення крутного моменту приводу ланки, Нм;
- максимальне значення крутного моменту приводу ланки, Нм;
![]() - статичний момент опору переміщенню ланки, Нм;
- статичний момент опору переміщенню ланки, Нм;
![]() - приведений момент інерції ланки, кгм2;
- приведений момент інерції ланки, кгм2;
![]() - номінальна кутова швидкість обертання вала приводу, яка відповідає номінальній швидкості переміщення ланки робота, рад/с;
- номінальна кутова швидкість обертання вала приводу, яка відповідає номінальній швидкості переміщення ланки робота, рад/с;
![]() - кількість дискретних значень кутової швидкості для розгону приводу (довжина масиву), яка визначається таким чином:
- кількість дискретних значень кутової швидкості для розгону приводу (довжина масиву), яка визначається таким чином:
![]() ,
,
де ![]() - частота дискретизації процесу, Гц.
- частота дискретизації процесу, Гц.
Текст
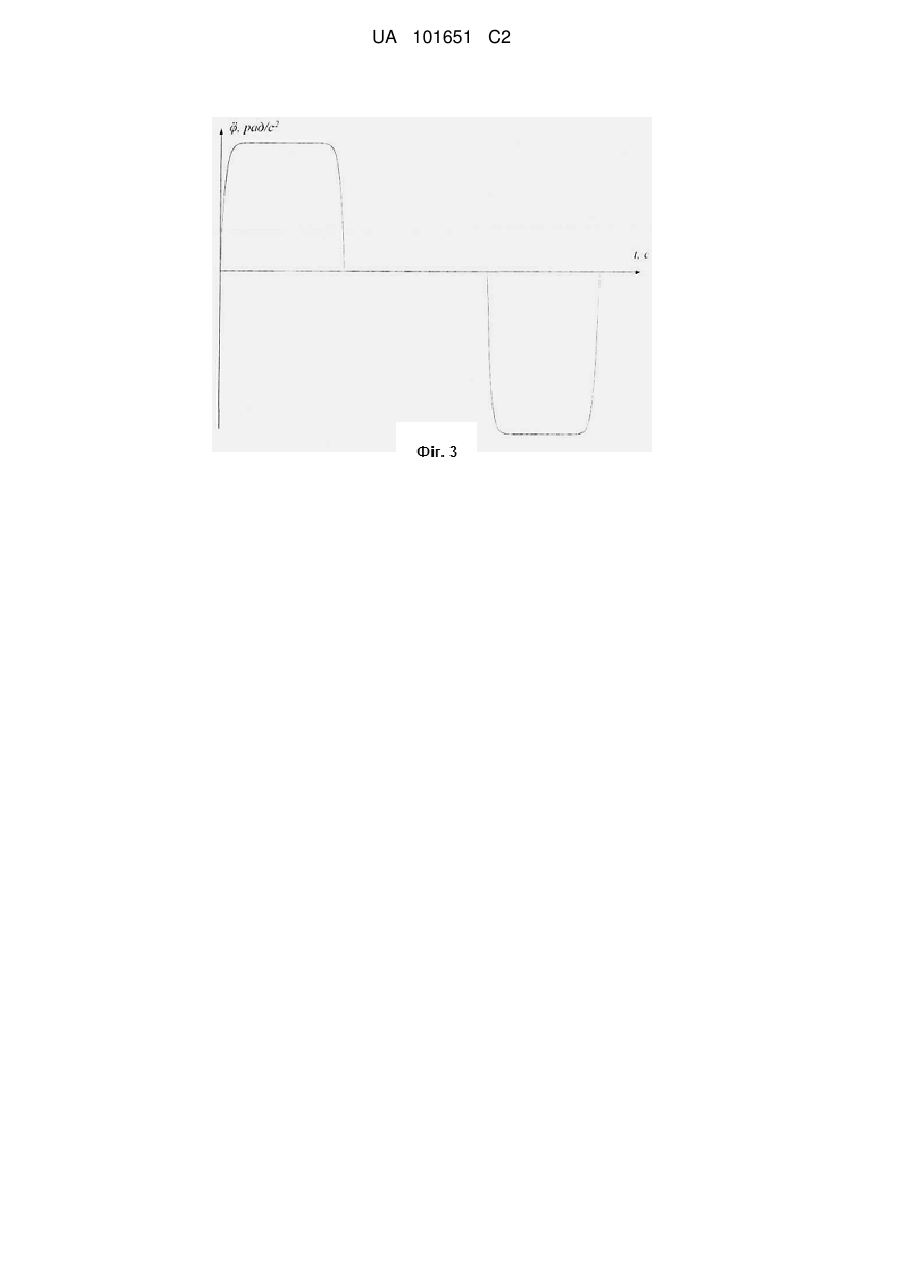
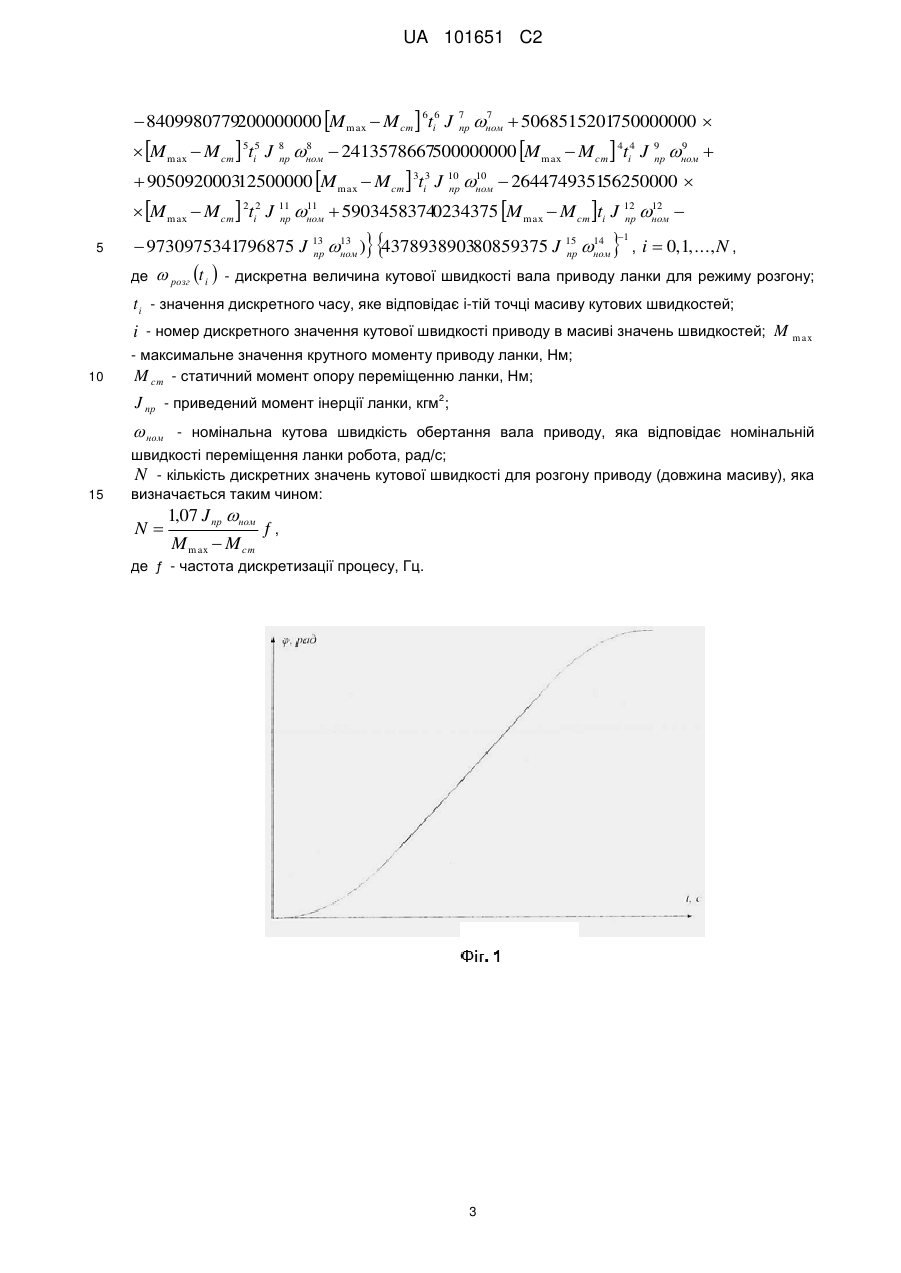
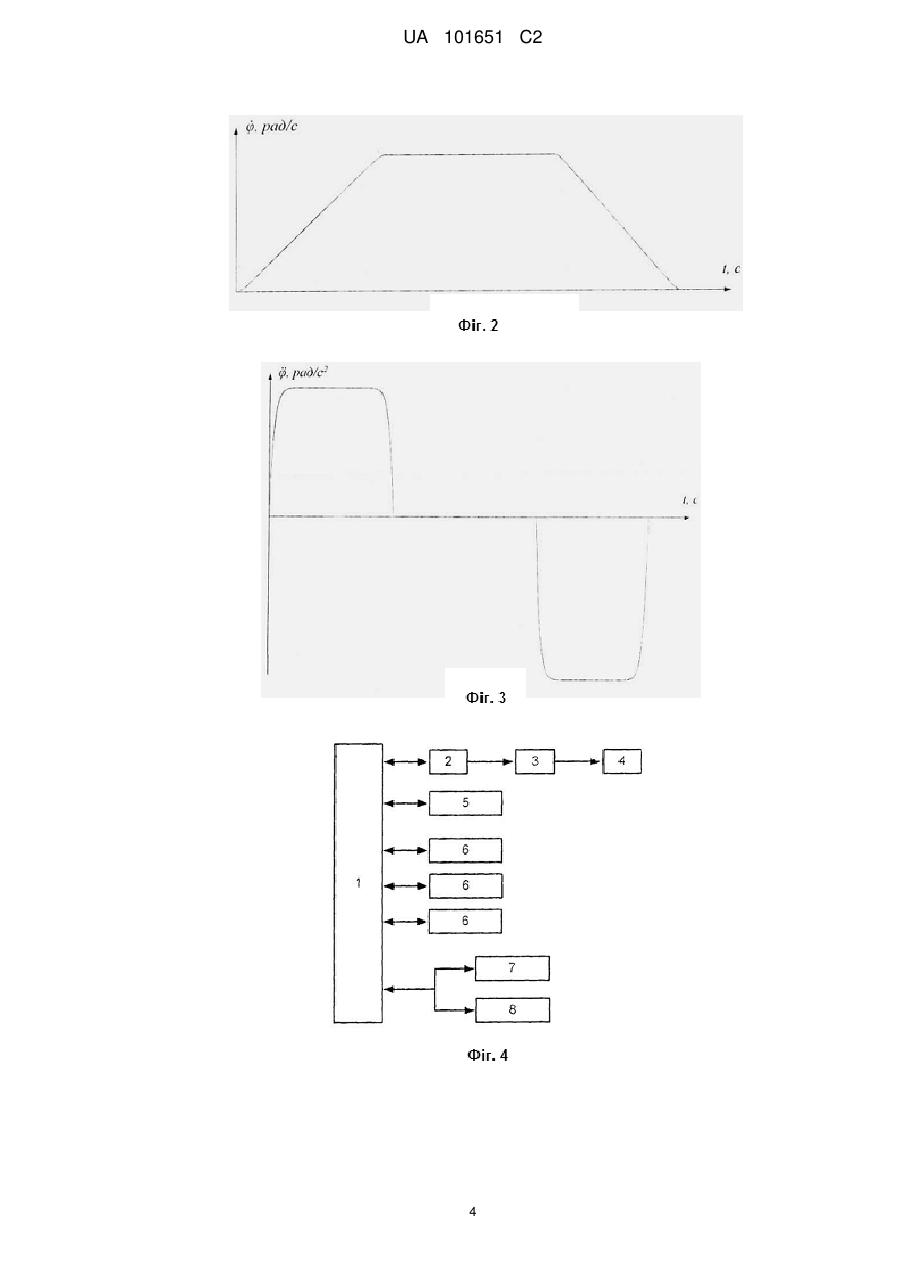
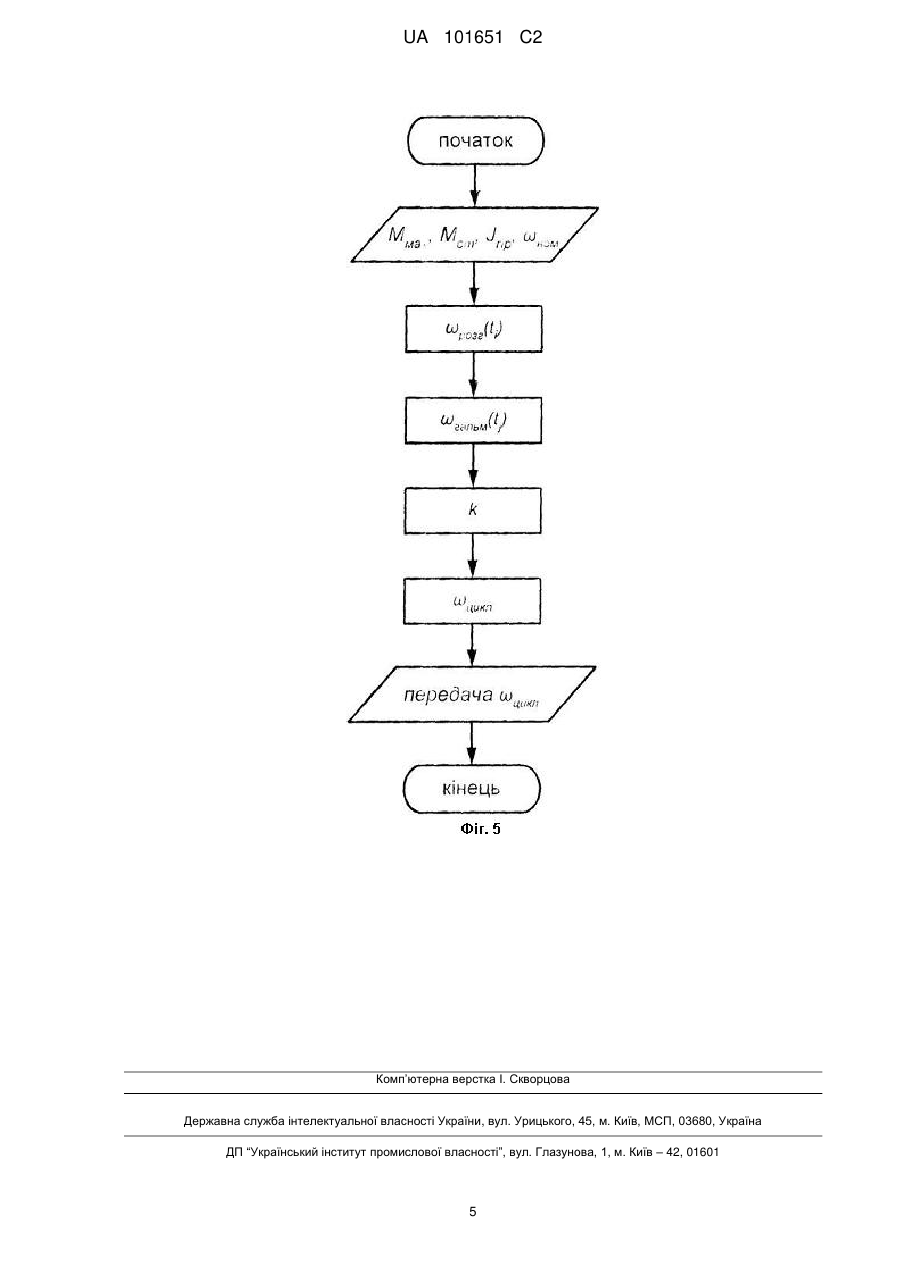
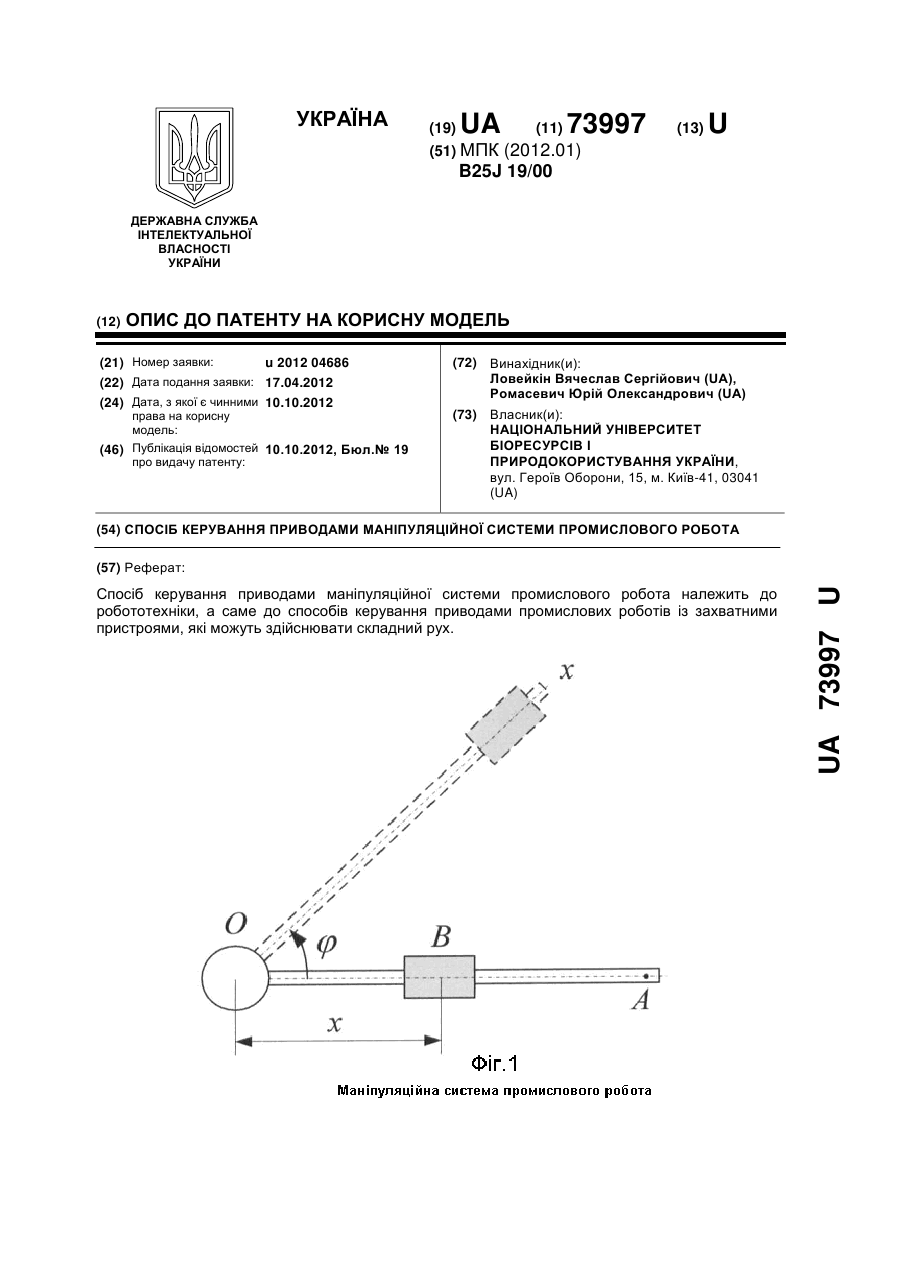
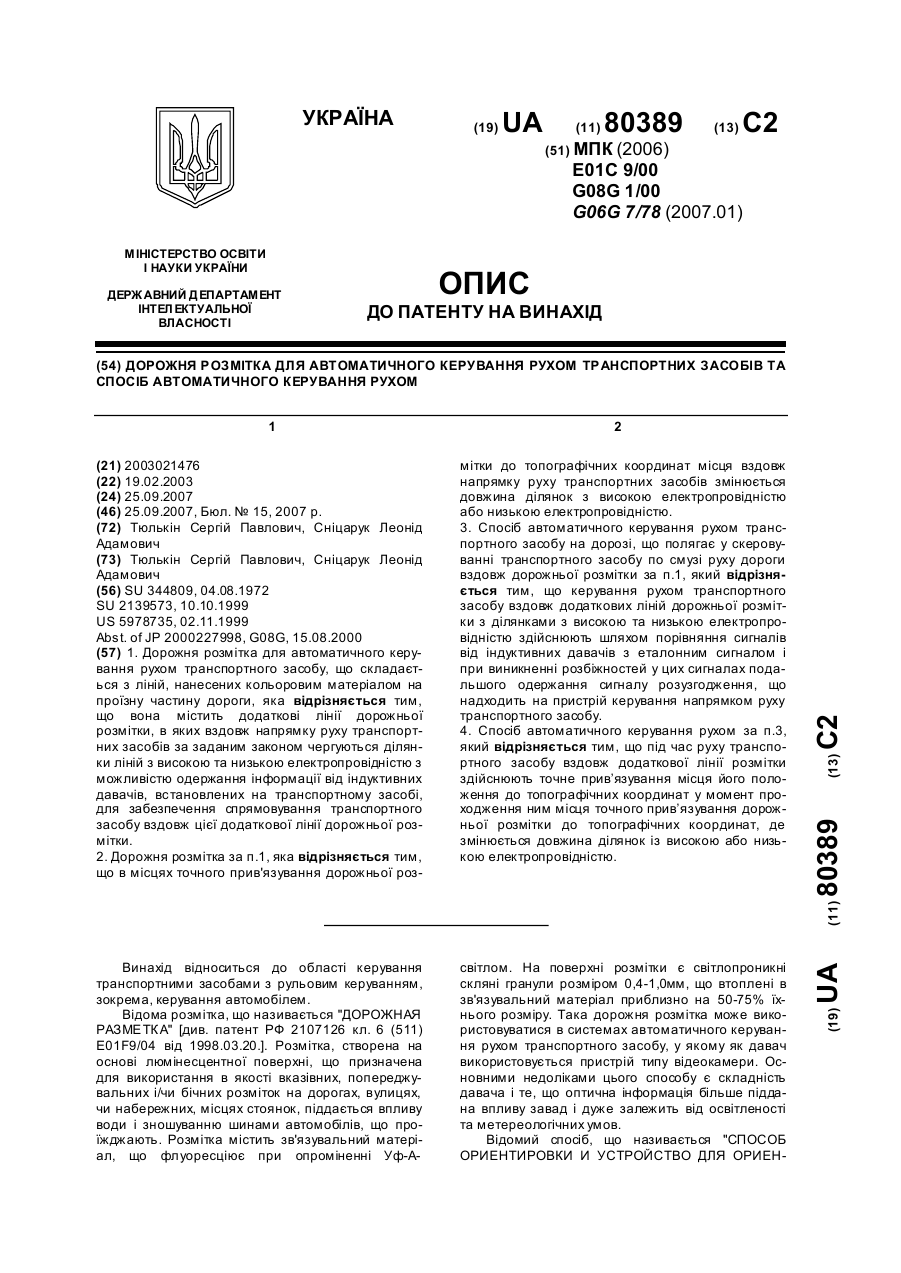
Реферат: Винахід належить до засобів керування робочими рухами промислових роботів. Спосіб керування рухом промислового робота передбачає встановлення розгону і гальмування ланки робота при максимальному приводному моменті. Розгін і гальмування ланки робота здійснюють за певним дискретним законом, який описується поліноміальною залежністю від аргументу часу. Технічним результатом є зменшення навантажень в елементах робота при виключенні умов виникнення коливань ланок робота та незначному зростанні перехідних процесів. UA 101651 C2 (12) UA 101651 C2 UA 101651 C2 5 10 15 20 25 30 35 Винахід належить до способів керування рухами промислових роботів, особливо при їх частих пусках і зупинках. Відомий спосіб керування роботом, який базується на незмінності тривалості прискорення та сповільнення ланки робота. Спосіб встановлює рівність тривалостей розгону та гальмування ланки робота, при цьому визначення величини тривалості перехідного процесу ґрунтується на розрахунку максимального прискорення ланки, яке в свою чергу визначається шляхом ділення різниці максимального моменту приводу ланки та статичного моменту на момент інерції ланки. Таким чином, визначається оптимальне значення тривалості розгону та гальмування ланки робота в залежності від максимального моменту приводу (пат. 5325467 США MПК B25J 19/00. Robot control method based on acceleration/deceleration time constant / Nobutoshi Torii, Ryo Nihei, Yasuo Naito, Tetsuaki Kato, Satoshi Kinoshita; заявник та власник Fanuc Ltd. - № 820,881; заявл. 5.05.1991; опубл. 28.06.1994). Даний спосіб обраний за прототип. До недоліку прототипу варто віднести несприятливий характер зміни приводного моменту, а саме: на початку і у кінці розгону або гальмування ланки функція приводного моменту має розриви першого роду. Це призводить до підвищення навантаження приводу, динамічних перевантажень елементів механічної системи робота та їх небажаних коливань. В основу винаходу поставлена задача зменшити динамічні навантаження в приводі та у ланках робота, запобігти виникненню коливань ланок. Поставлена задача вирішується тим, що переміщення ланок робота відбувається за певним дискретним законом, який описується поліноміальною залежністю від аргументу часу. В результаті тривалість перехідних режимів руху ланки робота зростає незначно а динамічні навантаження в елементах робота мінімізуються, виключаються умови виникнення коливань ланок робота. На фіг. 1 зображені графіки зміни переміщення ланки , на фіг. 2 представлені графічні залежності швидкості ланки , на фіг. 3 показані графіки прискорення ланки . На фіг. 4 зображена структурна схема пристрою керування робота, яка реалізує пропонований спосіб. На фіг. 5 зображено алгоритм роботи системи керування для визначення діаграми швидкості ланки робота. Пристрій, який реалізує пропонований спосіб, складається з блока задання 1, до якого підключена слідкуюча система 2, яка керує роботою приводу 3 ланки робота 4. До блока задання 1 підключена індикаторна панель 5. На фіг. 4 позицією 6 позначені слідкуючі системи руху інших ланок робота. Блок задання 1 виконує планування переміщень ланок робота, а слідкуючі системи 6 безпосередньо керують приводами ланок. Мета руху робота надходить від комп'ютерної мережі 7, або від людини-оператора 8. Поставлена задача вирішується тим, що наперед встановлюють значення максимального Mmax та статичного моменту опору Mст , значення номінальної швидкості руху ланки ном та значення приведеного моменту інерції ланки Jпр (фіг. 5). Це виконується за допомогою 40 індикаторної панелі 5. Надалі запускають програму, першою операцією якої є розрахунок масиву дискретних значень швидкостей обертання вала приводу 3 ланки 4. Це виконується за наступною формулою: розг t i 196Mmax Mст 2 t i3 5805456627 2303104 Mmax Mст 13 t13 i 4976105680 48312320 Mmax Mст 12 t12 Jпр ном 1999328175 194112000 i 2 2 3 3 Mmax Mст 11t11 J пр ном 4998320437 985280000 Mmax Mст 10 t10 J пр ном i i 4 4 8702432905 420800000 Mmax Mст 9 t i9 Jпр ном 1118884230 6969600000 45 5 5 6 6 Mmax Mст 8 t i8 J пр ном 1098904155 1488000000 Mmax Mст 7 t i7 J пр ном 7 7 8409980779 200000000 Mmax Mст 6 t i6 J пр ном 5068515201 750000000 8 8 9 9 Mmax Mст 5 t i5 J пр ном 2413578667 500000000 Mmax Mст 4 t i4 J пр ном 9050920003 12500000 Mmax Mст 3 t i3 J 10 10 2644749351 56250000 пр ном Mmax Mст 2 t i2 J 11 11 5903458374 0234375 Mmax Mст t і J 12 12 пр ном пр ном 50 9730975341 796875 J 13 13 ) 4378938903 80859375 J 15 14 пр ном пр ном 1 , , i 0,1 ...,N , (1) де розг ti - дискретна величина кутової швидкості вала приводу ланки для режиму розгону; t i - значення дискретного часу, яке відповідає і-тій точці масиву кутових швидкостей; i - номер 1 UA 101651 C2 дискретного значення кутової швидкості приводу в масиві значень швидкостей; Mmax максимальне значення крутного моменту приводу ланки, Нм; Mст - статичний момент опору переміщенню ланки, Нм; Jпр - приведений момент інерції ланки, кгм ; ном - номінальна кутова швидкість обертання вала приводу, яка відповідає номінальній швидкості переміщення ланки робота, рад/с; N - кількість дискретних значень кутової швидкості для розгону приводу (довжина масиву), яка визначається таким чином: 2 5 N 107 Jпр ном , Mmax Mст ƒ , (2) де ƒ - частота дискретизації процесу, Гц. Отримане значення N заокруглюється до цілого значення. 10 Операцію формування масиву дискретних кутових швидкостей приводу розг ti , які відповідають розгону ланки до номінальної швидкості за оптимальною діаграмою виконує блок завдання 1. Потім проходить процес формування масиву дискретних значень кутових швидкостей для загальмовування ланки гальм t j (індекс j показує, що процес розрахунку відбувається для режиму гальмування). Це відбувається за допомогою розрахунку по 15 формулам (1) та (2) з тією лише різницею, що знак "-" перед Mст у цих формулах заміняється на "+". При цьому загальмовування відбувається різкіше, аніж розгін, і триває менше часу. Надалі у блоці задання 1 визначається кількість дискретних точок руху приводу на номінальній швидкості ном . Це виконується за формулою: 107 Jном , k кін ƒ ном Ммах Мст , (3) 20 25 30 35 де кін - кут повороту вала приводу, який відповідає кінцевому положенню ланки робота, рад. Отримане значення k заокруглюється до цілого значення. Далі відбувається формування загального масиву кутових швидкостей для усього циклу руху ланки цикл (фіг. 5). Сформований масив для усього циклу переміщення ланки передається до слідкуючої системи 2. Значення дискретних швидкостей використовуються для безпосереднього керування приводом 3 ланки 4 робота. Рух ланки робота за таким законом є плавним, що мінімізує динамічні навантаження та коливальні процеси. Крім того, максимальне зусилля, яке необхідне для переміщення ланки не перевищує максимального зусилля приводу, а початковий та кінцевий момент рівні статичному моменту. Це призводить до того, що привод 3 ланки працює у менш напруженому режимі. Пропонований спосіб руху ланки робота пов'язаний з втратою швидкодії ціною збільшення плавності руху, зменшенням динамічних навантажень та мінімізації коливальних процесів, які супроводжують рух ланки. При цьому втрата швидкодії складає менше 14 % від максимальної швидкодії руху ланки прототипу. Таким чином, поставлена задача вирішена. Пропонований спосіб може бути використаний для керування рухами робота, особливо у випадках, коли ланки робота мають великий момент інерції або масу, а приводний механізм не може створювати значний крутний момент. ФОРМУЛА ВИНАХОДУ 40 Спосіб керування рухом промислового робота, при якому розгін і гальмування ланки робота здійснюють при максимальному приводному моменті, який відрізняється тим, що розгін і гальмування ланки робота здійснюють за наступним дискретним законом, який описується поліноміальною залежністю від аргументу часу розг ti M max Mст 2ti3 58054566272303104 M max Mст 13ti13 196 45 497610568048312320 M max M ст 12ti12 J пр ном 1999328175194112000 M max M ст 11ti11 J 2 пр 2 ном 4998320437985280000 M max M ст 10ti10 J 3 пр 3 ном 4 4 8702432905420800000 M max M ст 9 t i9 J пр ном 11188842306969600000 5 6 M max M ст 8ti8 J 5 ном 10989041551488000000 M max M ст 7ti7 J 6 ном пр пр 2 UA 101651 C2 8409980779200000000 M max Mст 6ti6 J 7 пр 7 ном 5068515201750000000 8 9 M max Mст 5ti5 J 8 ном 2413578667500000000 M max Mст 4ti4 J 9 ном пр пр 10 905092000312500000 M max Mст 3ti3 J 10 ном 264474935156250000 пр 11 12 M max Mст 2ti2 J 11 ном 59034583740234375 M max Mст tі J 12 ном пр пр 5 13 14 9730975341796875 J 13 ном ) 437893890380859375 J 15 ном пр пр де 1 , i 0, 1, ..., N , розг t i - дискретна величина кутової швидкості вала приводу ланки для режиму розгону; t i - значення дискретного часу, яке відповідає i-тій точці масиву кутових швидкостей; i - номер дискретного значення кутової швидкості приводу в масиві значень швидкостей; M m ax 10 - максимальне значення крутного моменту приводу ланки, Нм; M ст - статичний момент опору переміщенню ланки, Нм; J пр - приведений момент інерції ланки, кгм2; ном 15 - номінальна кутова швидкість обертання вала приводу, яка відповідає номінальній швидкості переміщення ланки робота, рад/с; N - кількість дискретних значень кутової швидкості для розгону приводу (довжина масиву), яка визначається таким чином: N 1,07 J пр ном M max M ст ƒ, де ƒ - частота дискретизації процесу, Гц. 3 UA 101651 C2 4 UA 101651 C2 Комп’ютерна верстка І. Скворцова Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 5
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod of controlling movement of industrial robot
Автори англійськоюLoveikin Viacheslav Serhiiovych, Romasevych Yurii Oleksandrovych
Назва патенту російськоюСпособ управления движением промышленного робота
Автори російськоюЛовейкин Вячеслав Сергеевич, Ромасевич Юрий Александрович
МПК / Мітки
МПК: C05B 19/00, B25J 9/00
Мітки: робота, спосіб, промислового, рухом, керування
Код посилання
<a href="https://ua.patents.su/7-101651-sposib-keruvannya-rukhom-promislovogo-robota.html" target="_blank" rel="follow" title="База патентів України">Спосіб керування рухом промислового робота</a>
Спосіб керування приводами маніпуляційної системи промислового робота
Номер патенту: 73997
Опубліковано: 10.10.2012
Автори: Ромасевич Юрій Олександрович, Ловейкін Вячеслав Сергійович
МПК: B25J 19/00
Мітки: приводами, спосіб, промислового, маніпуляційної, керування, робота, системі
Формула / Реферат:
Спосіб керування приводами маніпуляційної системи промислового робота, що включає зміну швидкостей приводів поступального та обертального руху робота, причому максимальні значення вказаних швидкостей не перевищують наперед встановлених значень, який відрізняється тим, що швидкості привідних механізмів робота змінюють за оптимальними законами, які описують дискретними функціями часу:- для приводу поступального руху
Дорожня розмітка для автоматичного керування рухом транспортних засобів та спосіб автоматичного керування рухом
Номер патенту: 80389
Опубліковано: 25.09.2007
Автори: Сніцарук Леонід Адамович, Тюлькін Сергій Павлович
МПК: E01C 9/00, G06G 7/78, G08G 1/00
Мітки: розмітка, дорожня, автоматичного, рухом, керування, засобів, спосіб, транспортних
Формула / Реферат:
1. Дорожня розмітка для автоматичного керування рухом транспортного засобу, що складається з ліній, нанесених кольоровим матеріалом на проїзну частину дороги, яка відрізняється тим, що вона містить додаткові лінії дорожньої розмітки, в яких вздовж напрямку руху транспортних засобів за заданим законом чергуються ділянки ліній з високою та низькою електропровідністю з можливістю одержання інформації від індуктивних давачів, встановлених на...
Спосіб керування рухом багатоланкового транспортного засобу
Номер патенту: 76268
Опубліковано: 25.12.2012
Автори: Поляков Віктор Михайлович, Сахно Володимир Прохорович, Марчук Роман Миколайович, Марчук Назар Миколайович, Стрілець Володимир Миколайович
МПК: B62D 13/00
Мітки: спосіб, керування, засобу, рухом, багатоланкового, транспортного
Формула / Реферат:
Спосіб керування рухом багатоланкового транспортного засобу, що здійснюється за рахунок магнітної головки, яка виконує запис траєкторії ведучої ланки на проїжджій частині, яка містить магнітну речовину і подає інформацію на колеса веденої ланки, який відрізняється тим, що на колесах ведучої ланки встановлені давачі частоти їх обертання, а керування частотою обертання коліс ведених ланок виконується за рахунок регулювання тиску в гальмівних...
Спосіб керування рухом багатоланкового транспортного засобу
Номер патенту: 76276
Опубліковано: 25.12.2012
Автори: Сахно Володимир Прохорович, Поляков Віктор Михайлович, Стрілець Володимир Миколайович, Марчук Назар Миколайович, Марчук Роман Миколайович
МПК: B62D 13/00, B60T 8/24
Мітки: рухом, багатоланкового, керування, спосіб, засобу, транспортного
Формула / Реферат:
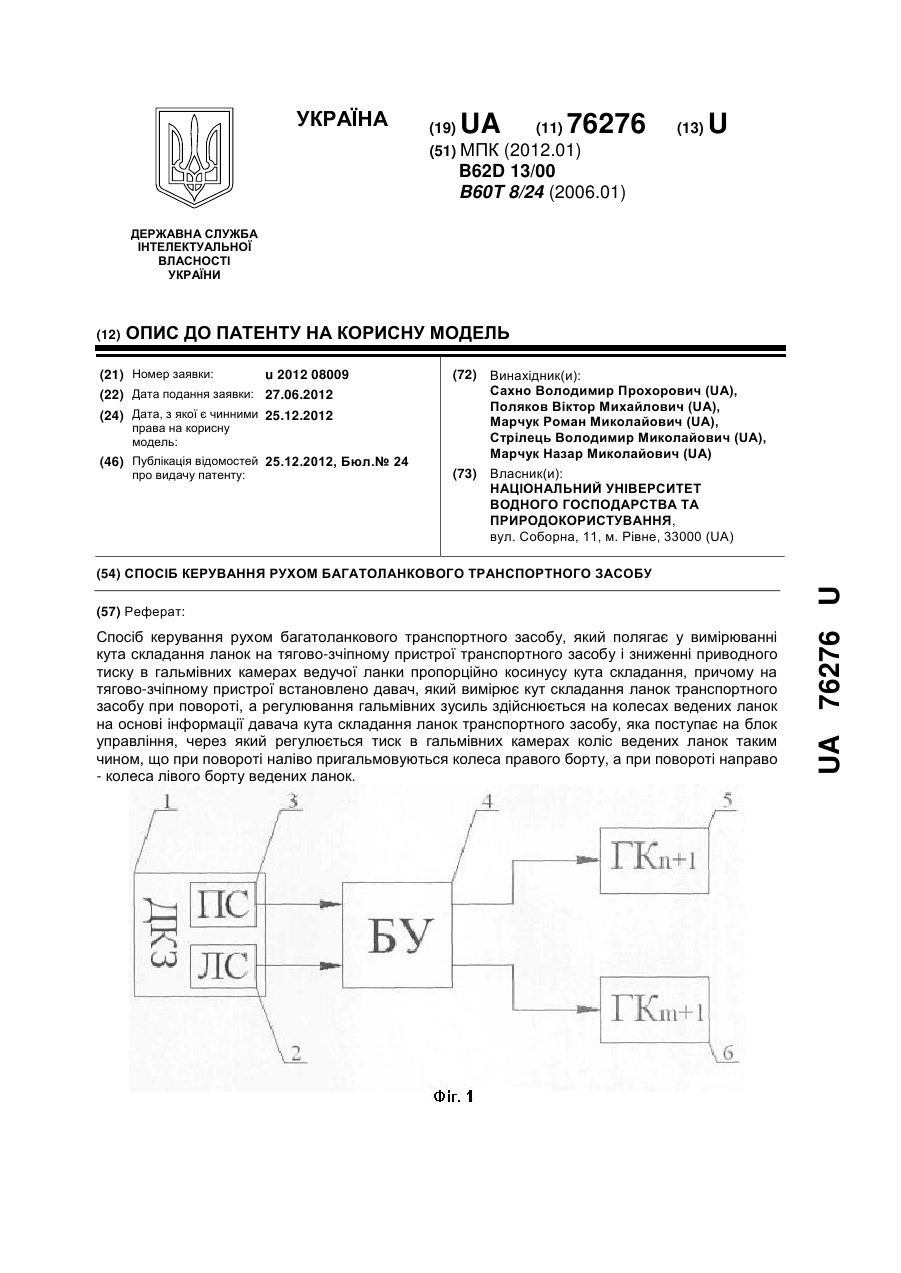
Спосіб керування рухом багатоланкового транспортного засобу, який полягає у вимірюванні кута складання ланок на тягово-зчіпному пристрої транспортного засобу і зниженні приводного тиску в гальмівних камерах ведучої ланки пропорційно косинусу кута складання, який відрізняється тим, що на тягово-зчіпному пристрої встановлено давач, який вимірює кут складання ланок транспортного засобу при повороті, а регулювання гальмівних зусиль здійснюється...
Двозахватний пристрій промислового робота

Номер патенту: 18720
Опубліковано: 15.11.2006
Автори: Годунко Максим Олегович, Павленко Іван Іванович, Мажара Віталій Анатолійович
МПК: B25J 18/00, B23Q 3/06
Мітки: пристрій, робота, промислового, двозахватний
Формула / Реферат:
1. Двозахватний пристрій промислового робота для одночасного затиску двох деталей, який складається з механізму зміни захватів місцями, фланця, кисті та захватів, який відрізняється тим, що його устатковано гальмівним механізмом, а вісь захвату виконано паралельно осі руки робота.2. Двозахватний пристрій промислового робота за п. 1, який відрізняється тим, що як гальмівний механізм використано гідравлічні демпфери.
Попередній патент: Спосіб і пристрій для здійснення інформаційного запиту сеансу для визначення місцеположення площини користувача
Наступний патент: Композиція для інгаляції, що містить аклідиній для лікування астми та хронічного обструктивного захворювання легень
Випадковий патент: Спосіб розміщення сигарет з фільтром у пачці