Підйомно-транспортний робот
Номер патенту: 65191
Опубліковано: 25.11.2011
Автори: Чокнадій Лідія Миронівна, Носко Павло Леонідович, Шисман Володимир Юхимович, Філь Павло Володимирович
Формула / Реферат
Підйомно-транспортний робот, рука якого являє собою шарнірно зв'язані між собою ланки, що входять у кінематичні пари, який відрізняється тим, що ланки виконані у вигляді пантографа та забезпечені приводом зміни довжини ланок, сполученим з ланками через задавальний механізм керування ланками, що змінює довжини ланок пропорційно, привод забезпечено повзунами, встановленими з можливістю переміщення паралельно суміжним ланкам.
Текст
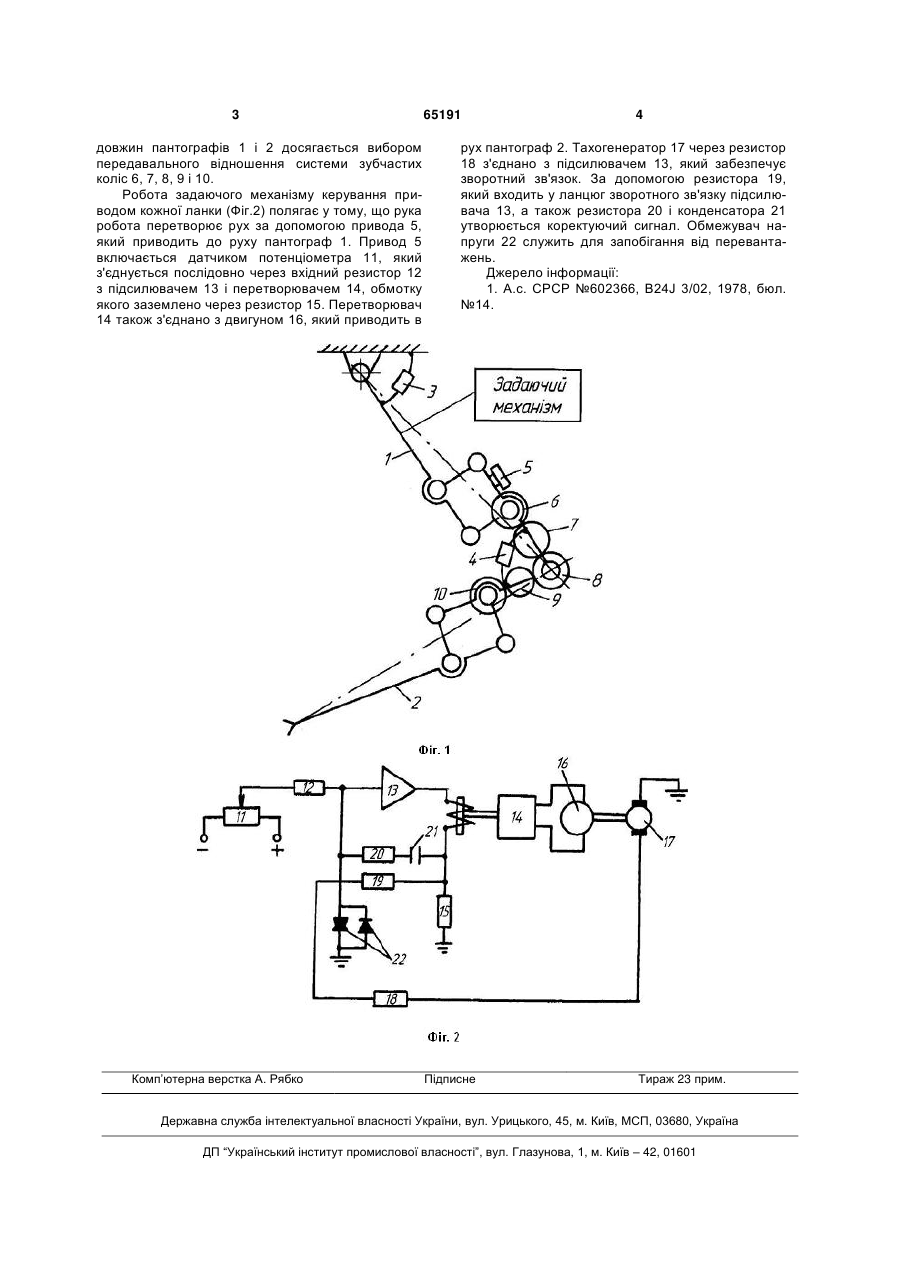
Підйомно-транспортний робот, рука якого являє собою шарнірно зв'язані між собою ланки, що входять у кінематичні пари, який відрізняється тим, що ланки виконані у вигляді пантографа та забезпечені приводом зміни довжини ланок, сполученим з ланками через задавальний механізм керування ланками, що змінює довжини ланок пропорційно, привод забезпечено повзунами, встановленими з можливістю переміщення паралельно суміжним ланкам. (19) (21) u201106455 (22) 23.05.2011 (24) 25.11.2011 (46) 25.11.2011, Бюл.№ 22, 2011 р. (72) НОСКО ПАВЛО ЛЕОНІДОВИЧ, ШИСМАН ВОЛОДИМИР ЮХИМОВИЧ, ФІЛЬ ПАВЛО ВОЛОДИМИРОВИЧ, ЧОКНАДІЙ ЛІДІЯ МИРОНІВНА (73) СХІДНОУКРАЇНСЬКИЙ НАЦІОНАЛЬНИЙ УНІВЕРСИТЕТ ІМЕНІ ВОЛОДИМИРА ДАЛЯ 3 довжин пантографів 1 і 2 досягається вибором передавального відношення системи зубчастих коліс 6, 7, 8, 9 і 10. Робота задаючого механізму керування приводом кожної ланки (Фіг.2) полягає у тому, що рука робота перетворює рух за допомогою привода 5, який приводить до руху пантограф 1. Привод 5 включається датчиком потенціометра 11, який з'єднується послідовно через вхідний резистор 12 з підсилювачем 13 і перетворювачем 14, обмотку якого заземлено через резистор 15. Перетворювач 14 також з'єднано з двигуном 16, який приводить в Комп’ютерна верстка А. Рябко 65191 4 рух пантограф 2. Тахогенератор 17 через резистор 18 з'єднано з підсилювачем 13, який забезпечує зворотний зв'язок. За допомогою резистора 19, який входить у ланцюг зворотного зв'язку підсилювача 13, а також резистора 20 і конденсатора 21 утворюється коректуючий сигнал. Обмежувач напруги 22 служить для запобігання від перевантажень. Джерело інформації: 1. А.с. СРСР №602366, B24J 3/02, 1978, бюл. №14. Підписне Тираж 23 прим. Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюHoisting robot
Автори англійськоюNosko Pavlo Leonidovych, Shysman Volodymyr Yukhymovych, Fil Pavlo Volodymyrovych, Choknadii Lidia Myronivna
Назва патенту російськоюПодъемно-транспортный робот
Автори російськоюНоско Павел Леонидович, Шисман Владимир Ефимович, Филь Павел Владимирович, Чокнадий Лидия Мироновна
МПК / Мітки
МПК: B66C 23/00
Мітки: робот, підйомно-транспортний
Код посилання
<a href="https://ua.patents.su/2-65191-pidjjomno-transportnijj-robot.html" target="_blank" rel="follow" title="База патентів України">Підйомно-транспортний робот</a>
Підйомно-транспортний комплекс
Номер патенту: 40743
Опубліковано: 15.12.2003
Автори: Волошина Тетяна Миколаївна, Волошин Микола Якович
МПК: B66B 17/00, B65G 63/00, B66B 9/16, E21F 13/06
Мітки: комплекс, підйомно-транспортний
Формула / Реферат:
1. Підйомно-транспортний комплекс, що містить вантажопідйомники з індивідуальним приводом і знімними колесами для взаємодії з напрямною, яка установлена вздовж похилої колії, горизонтальні колії і привідні поворотні мости, кожен з яких виконаний у вигляді рами з закріпленими на ній додатковими відрізками колії і додатковими відрізками напрямної та містить похилу і горизонтальну опори, які жорстко зв'язані між собою з можливістю виконувати...
Підйомно-транспортний комплекс
Номер патенту: 29976
Опубліковано: 11.02.2008
Автор: Волошин Микола Якович
МПК: B65G 67/32, B66B 9/06, B66F 7/00
Мітки: комплекс, підйомно-транспортний
Формула / Реферат:
1. Підйомно-транспортний комплекс, що містить вантажопідйомники з індивідуальним приводом і знімними колесами для взаємодії з напрямною, яка установлена вдовж похилої колії, горизонтальні колії і привідні поворотні мости, кожен з яких виконаний у вигляді рами із закріпленими на ній додатковими відрізками колії і додатковими відрізками напрямної та містить похилу та горизонтальну опори, які жорстко зв'язані між собою з можливістю обертання...
Підйомно-транспортний комплекс

Номер патенту: 33240
Опубліковано: 15.04.2004
Автори: Волошина Тетяна Миколаївна, Волошин Микола Якович
МПК: B66B 9/06, B65G 67/32, B66F 7/00
Мітки: підйомно-транспортний, комплекс
Формула / Реферат:
1. Підйомно-транспортний комплекс, що містить у собі вантажопідйомники з індивідуальним приводом і знімними колесами для взаємодії з напрямною, яка установлена вздовж похилої колії, горизонтальної колії і привідні поворотні мости, кожен з яких виконаний у вигляді рами із закріпленими на ній додатковими відрізками колії і додатковими відрізками напрямної та містить похилу і горизонтальну опори, які жорстко зв’язані між собою з можливістю...
Промисловий робот
Номер патенту: 67181
Опубліковано: 15.06.2004
Автори: Бергер Еміль Григорович, Бергер Євгеній Емильович, Осадчий Володимир Степанович
МПК: B25J 11/00
Мітки: промисловий, робот
Формула / Реферат:
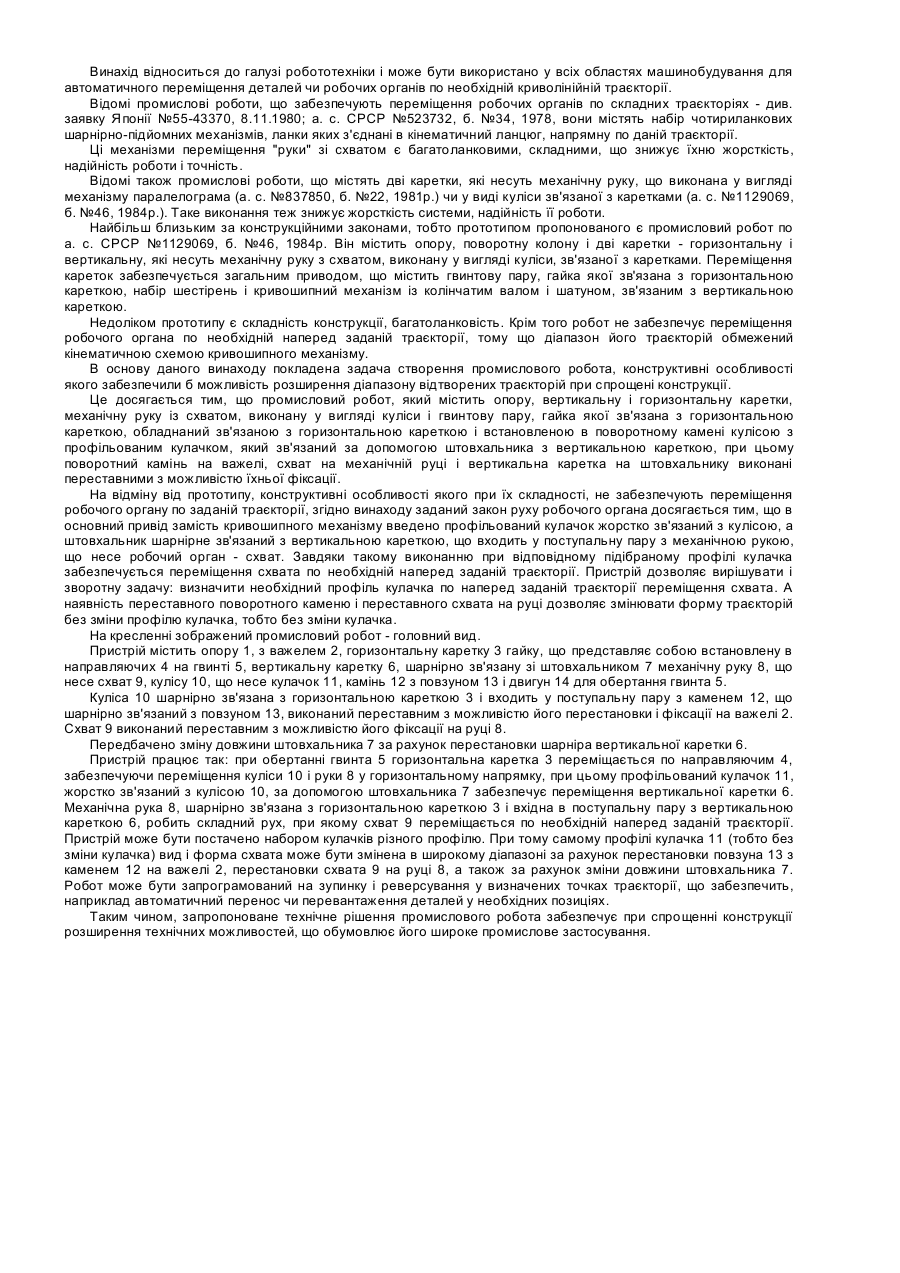
Промисловий робот, що містить опору, вертикальну і горизонтальну каретки, механічну руку із схватом, виконану у вигляді куліси, і гвинтову пару, гайка якої зв'язана з горизонтальною кареткою, який відрізняється тим, що він обладнаний зв'язаною з горизонтальною кареткою і встановленою в поворотному камені кулісою з профільованим кулачком, який зв'язаний за допомогою штовхача з вертикальною кареткою, при цьому поворотний камінь на важелі, схват...
Автономний робот
Номер патенту: 94408
Опубліковано: 10.05.2011
Автори: Янік Бартоломєй, Чуприняк Рафал
МПК: B25J 11/00, B25J 13/08, B25J 19/00, G05B 11/01, G05B 19/414
Мітки: робот, автономний
Формула / Реферат:
1. Автономний робот, оснащений системою керування, камерою візуального спостереження, мікрофонами, приймально-передавальним пристроєм і системою приводу, розміщеними усередині корпуса, який відрізняється тим, що корпус (15) складається із двох куполів (5, 6), з'єднаних між собою рознімним з'єднанням і закритих з однієї сторони, на зовнішніх стінках яких розміщені обвідні кільця (13, 14), а усередині кожного купола (5, 6) розміщена система...
Попередній патент: Рейкова циліндрична зубчаста передача
Наступний патент: Пристрій для формування валка зернових колосових
Випадковий патент: Блок сигарет і листовий пакувальний матеріл для нього