Спосіб керування кистю маніпулятора
Номер патенту: 63461
Опубліковано: 10.10.2011
Автори: Пестунов Володимир Михайлович, Стеценко Олексій Сергійович
Формула / Реферат
Спосіб керування кистю маніпулятора, при якому затиск заготовки здійснюють при мінімальному, заздалегідь визначеному зусиллі і в ході транспортування контролюють відносне переміщення кисті і заготівки, а за наявності проковзувань зусилля затиску збільшують, який відрізняється тим, що зусилля затиску дискретно збільшують у функції сумарного сигналу датчика переміщення і його похідної, для чого сигнал датчика диференціюють, а коефіцієнт збільшення зусилля затиску приймають із співвідношення:
Р=k·Р1,
де Р і Р1 - фактичне і мінімальне зусилля затиску;
k - коефіцієнт збільшення зусилля затиску, приймається в межах
k=1,06...1,41,
причому коефіцієнт посилення приймають тим більший, чим більший сумарний сигнал в системі вимірювання переміщень.
Текст
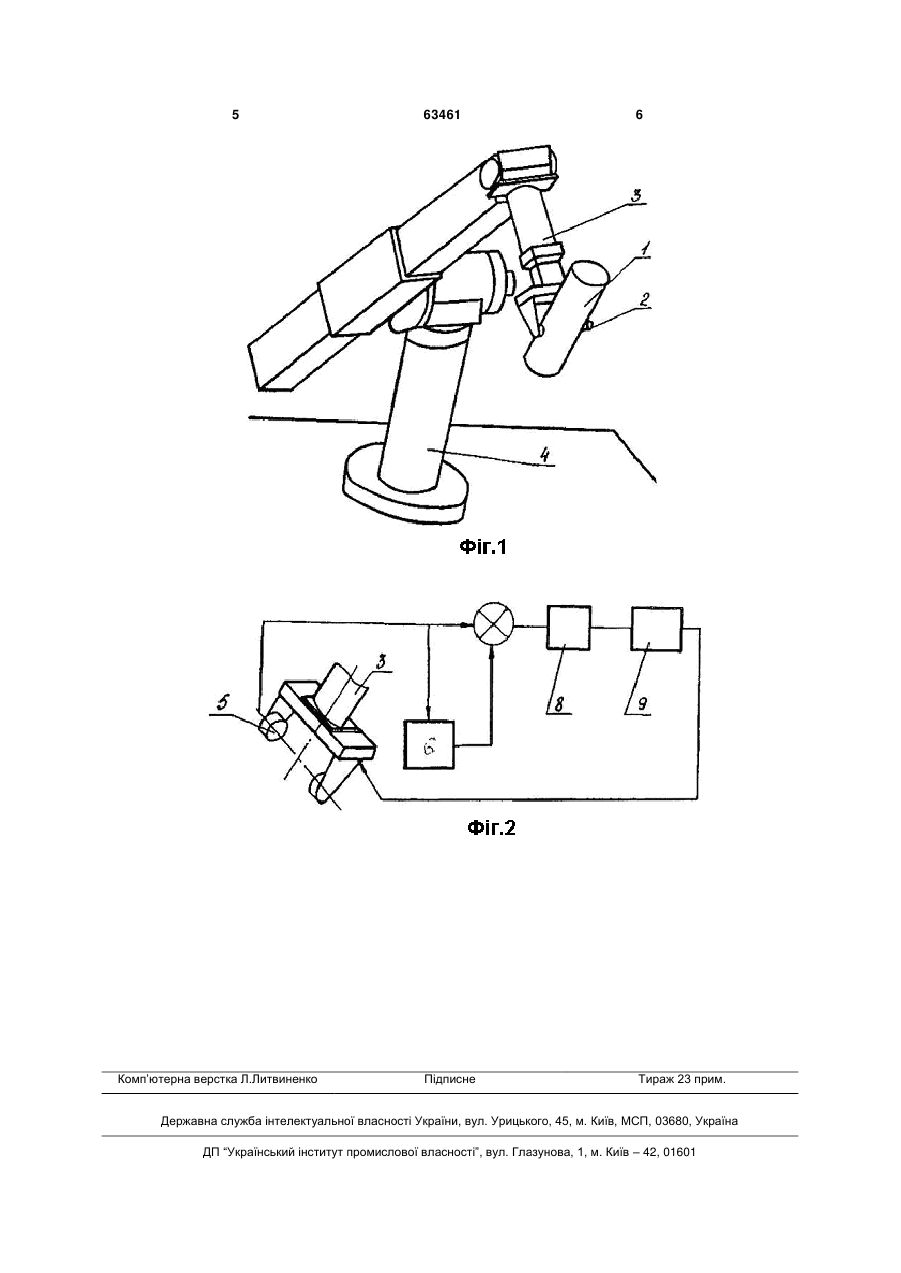
Спосіб керування кистю маніпулятора, при якому затиск заготовки здійснюють при мінімальному, заздалегідь визначеному зусиллі і в ході транспортування контролюють відносне переміщення кисті і заготівки, а за наявності проковзувань зусилля затиску збільшують, який відрізня 3 Запропонований спосіб характеризується наступною сукупністю відмінних ознак: 1. Наявністю сукупності дій. Контролюють швидкість відносного руху кисті і деталі, затиск деталі здійснюють при мінімальному, заздалегідь визначеному зусиллі, яке за наявності руху дискретно збільшують відповідно до приведеного співвідношення. 2. Порядком виконання вказаної сукупності. Перерахована сукупність взаємозв'язаних дій здійснюється паралельно-послідовно. На початку контролюють динамічний параметр, а потім здійснюють регулюванням. 3. Умовами, в яких забезпечується запропонований спосіб, є звичайні виробничі умови експлуатації роботів, при яких відбувається різка зміна запиленості, вологості, температури і т. п. Спосіб здійснюється в такій технологічній послідовності: деталь 1, що транспортується, захоплюється пальцями 2 кисті 3 маніпулятора 4. Пальці 2 маніпулятора стискають деталь 1, що транспортується, мінімальним, заздалегідь визначеним зусиллям. З цією метою в одному з пальців 2 кисті 3 вмонтований датчик 5, виконаний, наприклад, у вигляді підпружиненого ролика, кінематично пов'язаного з ротором, розташованим в магнітному полі котушки статора (не показано на схемі). Поверхня ролика виконана таким чином, що у контакті з деталлю, що транспортується, має більший коефіцієнт тертя, ніж кінематична пара палець - деталь, що транспортується. Це забезпечує обертання ролика за наявності відносного ковзання в контактній парі палець - деталь. Отриманий таким чином сигнал з датчика 5 (фіг. 2) подається на пристрій 6, що диференціює, і пристрій 7, що підсумовує. Таке підсумовування сигналів забезпечує підвищення чутливості системи керування. Результуючий сигнал подається на підсилювач 8, звідки надходить на виконавчий пристрій 9, який забезпечує дискретне збільшення зусилля затиску деталі 1 пальцями 2. Знаменник геометричного ряду збільшення зусилля затиску прийнятий із співвідношення Р=(1,06...1,41)·Р1, де Р і Р1 - фактичне і мінімальне значення зусилля затиску (кгс). За наявності відносного руху деталь - палець виконавчий пристрій 9 дискретно збільшує зусилля затиску. При цьому коефіцієнт посилення приймають тим більшим, чим більший сумарний сигнал в системі вимірювання переміщень. Якщо виявиться, що таке збільшення недостатнє і ковзання продовжується, виконавчий пристрій 9 знову збільшить силу затиску і так до виключення відносного ковзання в парі деталь - палець. В результаті забезпечується утримання деталі 1 в 63461 4 кисті 3 маніпулятора 4 із зусиллям, яке лише трохи (на 6-26 %) перевищує необхідне. Числовий приклад здійснення пропонованого способу. Провести транспортування скляних колб 30 мм в зоні можливих переміщень маніпулятора. Маса деталі, що транспортується, m=50 г. Матеріал пальців маніпулятора сталь 40Х. Для утримання скляних колб пальцями маніпулятора визначимо зусилля попереднього їх захоплення: Q 50 P 500 гс, 0,1 де μ - коефіцієнт тертя. Якщо в результаті експлуатації маніпулятора зовнішні параметри середовища, наприклад вологість, змінюються, тоді і необхідна сила затиску стане недостатньою для утримання колби. Це викличе відносне ковзання в парі колба палець. В результаті виконавчий пристрій збільшить силу затиску до 530 (гс). Якщо відносний рух не припиниться, виконавчий пристрій знову дискретно збільшить силу затиску і так до ліквідації відносного руху в парі колба - палець. В результаті буде забезпечено транспортування з мінімальним підвищенням зусилля затиску, необхідного для утримання деталі. Запропонований спосіб вирішує задачу виключення надмірної сили затиску і підвищення надійності. За параметр керування в запропонованому способі прийнята відносна швидкість переміщення і потім функціональне збільшення зусилля, в той час як прототип таких дій не передбачає. Для підвищення чутливості в пропонованому способі передбачається керування по сумарному сигналу, в той час як в прототипі цього немає. Таким чином, поставлена задача виключення надмірного затиску досягається. При цьому підвищується надійність роботи, оскільки незалежно від стану зовнішнього середовища забезпечується надійне транспортування деталей. Істотні відмінності способу керування кистю маніпулятора полягають в тому, що приведене у формулі поєднання взаємозв'язаних дій забезпечує отримання якісно нового результату. Цей результат полягає в тому, що робот відтворює роботу кисті руки людини при порівняній простоті здійснення способу. Спосіб може знайти широке застосування в системах комплексної автоматизації виробничих процесів, наприклад, приладобудування. Економічна ефективність запропонованого способу забезпечується за рахунок спрощення системи, здешевлення і підвищення надійності. Інформаційні джерела: 1. А.С. СРСР № 613891, Бюл. № 25, 1978. 2. А.С. СРСР № 888067, Бюл. № 45, 1981. 5 Комп’ютерна верстка Л.Литвиненко 63461 6 Підписне Тираж 23 прим. Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod of control of manipulator gripper
Автори англійськоюPestunov Volodymyr Mykhailovych, Stetsenko Oleksii Serhiiovych
Назва патенту російськоюСпособ управления кистью манипулятора
Автори російськоюПестунов Владимир Михайлович, Стеценко Алексей Сергеевич
МПК / Мітки
МПК: B25J 9/00
Мітки: маніпулятора, спосіб, керування, кистю
Код посилання
<a href="https://ua.patents.su/3-63461-sposib-keruvannya-kistyu-manipulyatora.html" target="_blank" rel="follow" title="База патентів України">Спосіб керування кистю маніпулятора</a>
Схват маніпулятора
Номер патенту: 35903
Опубліковано: 16.04.2001
Автори: Драпак Георгій Мефодійович, Романець Тарас Петрович
МПК: B25J 15/06
Мітки: маніпулятора, схват
Формула / Реферат:
Схват маніпулятора, який містить корпус, присмоктувані, упор та коромисло з'єднане з упором відрізняється тим, що присмоктувані приєднані до повзунів, які нерухомо закріплені на пружному коромислі з можливістю зміни їх положення і розташовані на штангах що жорстко приєднані до корпусу, а жорсткий упор встановлено на пружному коромислі з можливістю зміни його висоти і положення, і оснащено плоскою площиною розташованою паралельно повзунам з...
Очутливлений кистьовий суглоб маніпулятора промислового робота

Номер патенту: 58988
Опубліковано: 26.04.2011
Автори: Кирилович Валерій Анатолійович, Сазонов Артем Юрійович
МПК: B25J 15/00
Мітки: маніпулятора, робота, очутливлений, кистьовий, суглоб, промислового
Формула / Реферат:
Очутливлений кистьовий суглоб маніпулятора промислового робота, що містить корпус, перший та другий інформаційні блоки пристрою очутливлення, привід (13) переміщення і схвату, причому перший інформаційний блок пристрою очутливлення містить внутрішній фланець (19), до якого жорстко закріплені захват та внутрішнє кільце (20), з'єднане з внутрішнім фланцем (19) чотирма попарно та діаметрально протилежно розташованими пружними елементами, кожний...
Робоче обладнання маніпулятора
Номер патенту: 20011
Опубліковано: 15.01.2007
Автори: Качур Світлана Михайлівна, Семеній Наталія Олександрівна, Кукуюк Оксана Іванівна, Мелашич Василь Васильович
МПК: E02F 3/28
Мітки: робоче, обладнання, маніпулятора
Формула / Реферат:
Робоче обладнання маніпулятора, що містить рукоять, робочий орган у вигляді шарнірно-зубчатих щелепних кліщів та гідроциліндр керування щелепами, яке відрізняється тим, що зубчаті колеса щелеп за допомогою зубчатих передач з'єднані з зубчатими рейками, змонтованими на штоці гідроциліндра керування щелепами.
Підкладочний килимок до комп’ютерного маніпулятора типу “миша”
Номер патенту: 1141
Опубліковано: 15.01.2002
Автор: Кравцов Сергій Георгійович
МПК: G06T 11/80, G06F 3/033
Мітки: типу, килимок, комп'ютерного, підкладочний, миша, маніпулятора
Формула / Реферат:
Підкладочний килимок до комп'ютерного маніпулятора типу "миша", що має площинну форму, який відрізняється тим, що матеріалом для його виготовлення є пробкова прескомпозиція на основі кори пробкового дуба.
Робоче обладнання будівельного маніпулятора
Номер патенту: 20021
Опубліковано: 15.01.2007
Автори: Качур Світлана Михайлівна, Кукуюк Оксана Іванівна, Мелашич Василь Васильович, Семеній Наталія Олександрівна
МПК: E02F 3/28
Мітки: маніпулятора, робоче, будівельного, обладнання
Формула / Реферат:
Робоче обладнання будівельного маніпулятора, що містить рукоятку, дві гідрокеровані щелепи, гідроциліндри керування, яке відрізняється тим, що до нижньої частини рукоятки шарнірно прикріплена вставка, шарнірно з'єднана з криволінійною втулкою, складеною з двох шарнірно з'єднаних між собою частин, у внутрішніх порожнинах яких розміщені щелепи, шарнірно з'єднані з гідроциліндрами керування, причому втулка і щелепи виконані з однаковими...
Попередній патент: Спосіб створення гідравлічних ударів в трубопровідних системах
Наступний патент: Радіальний відстійник
Випадковий патент: Установка для зрідження кріогенного газу