Датчик проковзування адаптивного робота
Номер патенту: 15635
Опубліковано: 17.07.2006
Автори: Крутських Сергій Владиславович, Кондратенко Володимир Юрійович, Кондратенко Юрій Пантелійович
Формула / Реферат
Датчик проковзування адаптивного робота, що містить корпус, в якому встановлено чутливий елемент, виконаний у вигляді циліндричного ролика з можливістю повороту навколо своєї осі, робоча поверхня якого виконана з еластичного матеріалу, і систему реєстрації сигналу проковзування, який відрізняється тим, що система реєстрації сигналу проковзування виконана у вигляді двосекційного конденсатора, дві нерухомі обкладки якого через діелектрик жорстко закріплені на корпусі, а рухома - на торцевій поверхні чутливого елемента, і вимірювального блока, кожний з трьох входів якого підключений до відповідної обкладки двосекційного конденсатора, рухома обкладка двосекційного конденсатора виконана у вигляді плоскої фігури, що обмежена колом і одновитковою спіралеподібною лінією у вигляді ділянки архімедової спіралі, кінець якої розташований на колі, а початок - на радіусі, що сполучає центр кола з кінцем спіралеподібної лінії, причому нерухомі обкладки двосекційного конденсатора виконані у вигляді розділених діелектриком двох плоских напівкіл, розташованих навпроти одне одного в площині, що є паралельною торцевій поверхні чутливого елемента, а вихід вимірювального блока є виходом датчика.
Текст
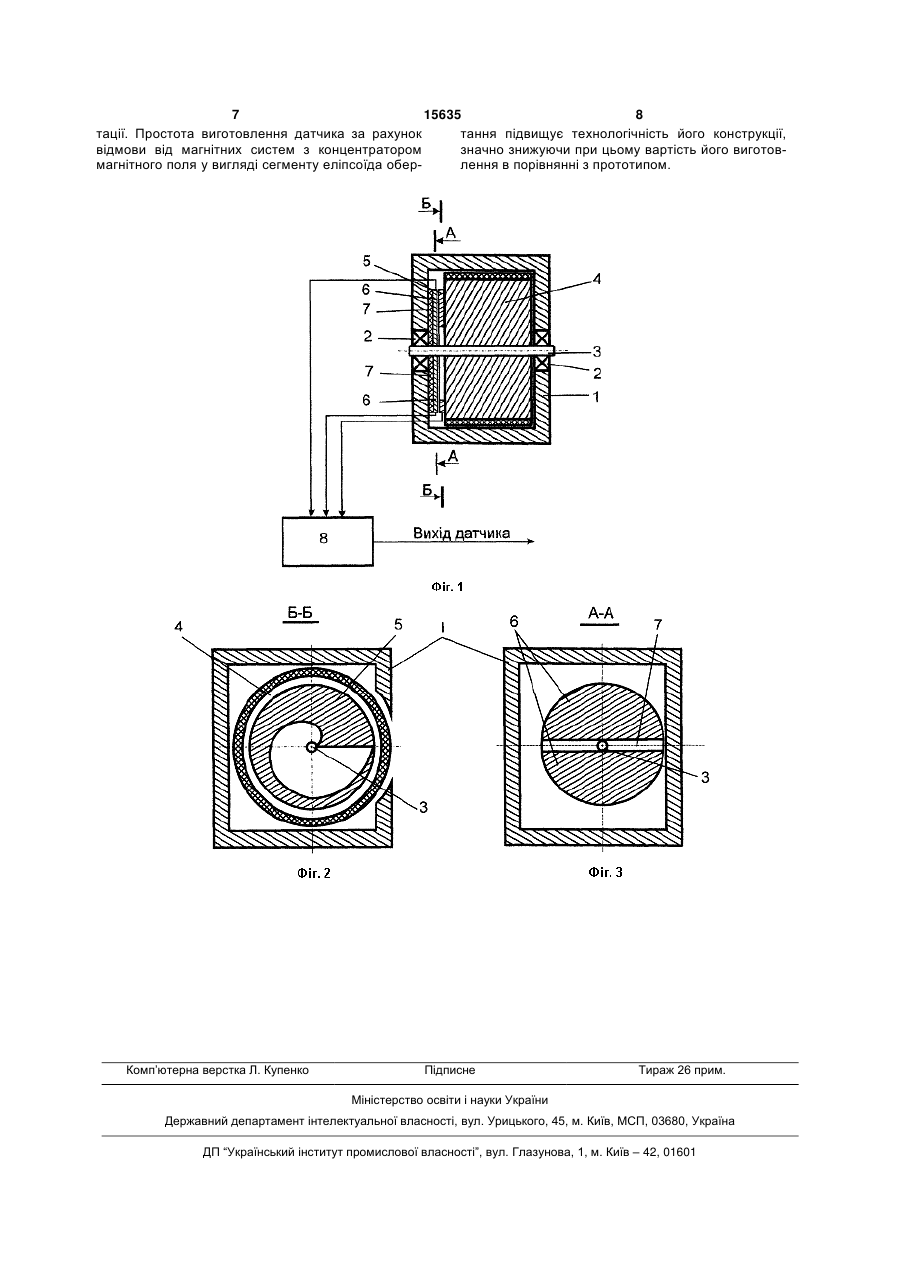
Датчик проковзування адаптивного робота, що містить корпус, в якому встановлено чутливий елемент, виконаний у вигляді циліндричного ролика з можливістю повороту навколо своєї осі, робоча поверхня якого виконана з еластичного матеріалу, і систему реєстрації сигналу проковзування, який відрізняється тим, що система реєстрації сигналу проковзування виконана у вигляді двосек 3 15635 4 суттєво обмежує функціональні можливості датчивиконаний у вигляді циліндричного ролика з ка адаптивного робота. можливістю повороту навколо своєї осі, і систему Найбільш близьким аналогом є датчик проковреєстрації сигналу проковзування. Робоча поверхзування деталі [а.с. СРСР №1546833, В25J 19/02, ня циліндричного ролика виконана з еластичного БИ №8, 1990], що прийнятий як прототип. Датчик матеріалу. Згідно з винаходом система реєстрації проковзування містить корпус, в якому розташовасигналу проковзування виконана у вигляді но з можливістю повороту навколо своєї осі циліндвохсекційного конденсатора, дві нерухомі обдричний ролик і магнітна система реєстрації сигкладки якого через діелектрик жорстко закріплені налу проковзування, яка виконана у вигляді двох на корпусі, а рухома - на торцевій поверхні чутлипостійних магнітів, один з яких встановлений у вого елементу, і вимірювального блоку, кожний з отворі ролика, що проходить через один з його трьох входів якого підключений до відповідної обдіаметрів, а інший - нерухомо закріплений на коркладки двохсекційного конденсатора, рухома обпусі і має концентратор магнітного поля у вигляді кладка двохсекційного конденсатора виконана у сегменту еліпсоїда обертання. На вершині конценвигляді плоскої фігури, що обмежена колом і одтратора, зверненій до бічної поверхні ролика, розновитковою спіралеродібною лінією у вигляді ташовано перетворювач Холла. Циліндричний ділянки архімедової спіралі, кінець якої розташоролик датчика при проковзуванні деталі в схваті ваний на колі, а початок - на радіусі, що сполучає адаптивного робота повертається навколо своєї центр кола з кінцем спіралеподібної лінії, причому осі, що викликає появу в перетворювачі Холла нерухомі обкладки двохсекційного конденсатора електричного сигналу, який саме і характеризує виконані у вигляді розділених діелектриком двох зсув (проковзування) деталі щодо губок схвата. плоских півкіл, розташованих навпроти одне одноТакий датчик проковзування має наступні прого в площині, що є паралельною торцевій поверхні блеми: чутливого елементу, а вихід вимірювального блока - складність конструкції, оскільки конструктивє виходом датчика. но датчик складається з чотирьох елементів: роЗапропонований датчик проковзування адаплика, магнітів, концентратора магнітного поля, тивного робота призначено для вирішення задачі виконаного у вигляді сегменту еліпсоїда обертансенсуалізації схватів адаптивних промислових ня, і датчика Холла. Велика кількість конструктивроботів і робототехнічних систем, що виконують них елементів, що вимагають певного розташуманіпуляційні операції з деталями, які відрізняютьвання відносно один одного, значно впливає на ся за масою та конфігурацією, а також можуть харозміри датчика і на його масу, відповідно. рактеризуватись неоднорідною магнітною проникДодаткові незручності можуть виникнути в процесі ністю. Реалізація і впровадження запропонованого виготовлення концентратора магнітного поля, що винаходу дозволить значно розширити номенкламає складну форму сегменту еліпсоїда обертання туру захоплюваних деталей і підвищити якість з жорстко заданими розмірами; оцінки їх масогабаритних показників. Підвищена - обмежені функціональні і технологічні можчутливість датчика дозволяє використовувати його ливості, оскільки проблематичною є робота датчипри реєстрації малих величин зміщення деталей ка проковзування з феромагнітними деталями, що (проковзування) відносно губок схвата, що мають нелінійну поверхню, або з деталями з непідвищує ефективність роботи адаптивних роботів однорідною магнітною проникністю, що буде вноширокою номенклатурою деталей з розширеним сити завади в роботу перетворювача Холла, а в діапазоном масо-габаритних характеристик. деяких випадках буде повністю компенсувати дію Рівень винахідництва забезпечується викорисмагнітного поля постійного магніта, який знахотанням для реєстрації сигналу проковзування дводиться всередині ролика, на перетворювач, внахсекційного конденсатора, дві нерухомі обкладки слідок чого проковзування деталі не буде зафіксоякого через діелектрик жорстко закріплені на корвано; пусі датчика проковзування, а рухома - на торцевій - низька перешкодостійкість та обмеженість поверхні чутливого елементу, а також виконанням області практичного використання даного датчика нерухомих та рухомої обкладок двохсекційного в магніто-активних середовищах, оскільки у разі конденсатора згідно з запропонованими конфігупопадання датчика проковзування в область дії раціями, зокрема, виконанням рухомої обкладки зовнішнього магнітного поля, яке впливатиме на двохсекційного конденсатора у вигляді плоскої нормальний режим функціонування перетворювафігури, що обмежена колом і одновитковою спірача Холла, можуть формуватись помилкові сигнали леподібною лінією у вигляді ділянки Архімедової проковзування при реальній відсутності проковзуспіралі, кінець якої розташований на колі, а почавання деталі в схваті адаптивного робота. ток - на радіусі, що сполучає центр кола з кінцем В основу корисної моделі поставлено задачу спіралеподібної лінії, а також виконанням нерухоудосконалення датчика проковзування адаптивномих обкладок двохсекційного конденсатора у виго робота шляхом зміни конструкції чутливого гляді розділених діелектриком двох плоских півкіл, реєструвального елемента, що дозволить спророзташованих навпроти одне одного в площині, стити конструкцію датчика проковзування, що є паралельною торцевій поверхні чутливого підвищити його перешкодостійкість та розширити елементу. Це дозволило якісно підвищити перешйого функціональні можливості і область практичкодостійкість датчика проковзування при роботі ного використання. адаптивного робота з об'єктами чи деталями, які Поставлена задача вирішується тим, що датвиготовлені з металу, мають нелінійну поверхневу чик проковзування адаптивного робота містить конфігурацію, неоднорідну магнітну проникність корпус, в якому встановлений чутливий елемент, матеріалу деталі, а також при функціонуванні ро 5 15635 6 бота в середовищі впливу змінного магнітного поспробного руху адаптивного робота з відповідним ля. Застосування запропонованого підходу дозвонарощуванням значення стискального зусилля. лило значно спростити конструкцію датчика проВідсутність проковзування деталі також фіксується ковзування, що призвело до зменшення його вимірювальним блоком 8 і свідчить про масо-габаритних показників. Така сукупність нових відповідність величини сформованого адаптивним ознак і складає задум винахідництва, що володіє роботом стискального зусилля значенню маси новизною та істотними відмінностями. Датчик продеталі, з якою необхідно в подальшому ковзування може бути широко застосований в здійснювати відповідні маніпуляційні операції. Випромисловості, зокрема в конструкціях адаптивних користання конденсатора з функціями активного роботів, що пристосовуються до маси захоплюваелемента системи реєстрації сигналу проковзуних деталей. вання дозволяє датчику проковзування працювати На Фіг.1 наведено схему датчика проковзуванв різних умовах і середовищах, в тому числі в умоня адаптивного робота (загальний вигляд) з вах змінних магнітних полів, при захопленні вимірювальним блоком; на Фіг.2 - вид рухомої обферомагнітних деталей з нелінійною кладки двохсекційного конденсатора (переріз А-А конфігурацією і нерівномірною магнітною на Фіг.1); на Фіг.3 - вид нерухомих обкладок проникністю. Конструктивне виконання рухомої двохсекційного конденсатора (переріз Б-Б на обкладки 5 з використанням обмежуючої Фіг.1). одновиткової спіральної лінії у вигляді ділянки У корпусі 1 (Фіг.1) датчика проковзування архімедової спіралі дозволяє значно підвищити адаптивного робота за допомогою підшипників 2 чутливість системи реєстрації сигналу проковзувстановлено вісь 3 із закріпленим на ній чутливим вання, оскільки при повороті ролика 4 на невелиелементом 4 у вигляді циліндричного ролика, рокий кут забезпечується одночасна зміна величин боча поверхня якого виконана з еластичного ємностей обох секцій двохсекційного конденсатоматеріалу. На торцевій частині ролика 4 ра згідно з залежністю, що визначається властизакріплено рухому обкладку 5 двохсекційного конвостями архімедової спіралі: при повороті рухомої денсатора, що є основним елементом системи обкладки 5 ємність однієї з секцій двохсекційного реєстрації сигналу проковзування. Навпроти конденсатора збільшується, а іншої -зменшується. рухомої обкладки 5 на корпусі датчика закріплені Підвищена чутливість датчика проковзування нерухомі обкладки 6 двохсекційного конденсатора, дозволяє адаптивному роботу працювати з детащо ізольовані від корпусу 1 діелектричною пролями, що мають невеликі габарити. Це пов'язано з кладкою 7. Нерухомі 6 і рухома 5 обкладки, що тим, що реєстрація проковзування деталі відносно утворюють двосекційний конденсатор, губок схвата буде здійснюватись при значно менпідключаються до відповідних входів шому в порівнянні з прототипом мінімальному вимірювального блоку 8. Сигнал з виходу зміщенні деталі, при якому забезпечується надійна вимірювального блоку є вихідним сигналом датчиреєстрація сигналу проковзування, тобто при ка проковзування адаптивного робота. значно менших величинах спробних рухів Запропонований пристрій працює наступним механічної руки адаптивного робота. При різних чином. В первинному стані (до початку спробного способах з'єднання ємнісних секцій двохсекційного руху схвата адаптивного робота) чутливий елеконденсатора (послідовному, паралельному, за мент датчика проковзування (ролик 4) притиснуто мостовою схемою) забезпечуються регулювання робочою поверхнею до захоплюваної деталі. Цей чутливості датчика проковзування і його стан датчика відповідає створенню приводом універсальність у використанні типових пристроїв схвата адаптивного робота мінімального значення з функціями вимірювального блока [Электронные стискального зусилля для утримання деталі, що измерительные преобразователи для промышзнаходиться між двома губками схвата. ленных измерений малых значений емкости. КонВимірювальним блоком 8 при цьому реєструється трольно-измерительная техника: Экспресспочатковове значення ємності двохсекційного конинформация. - М., ВИНИТИ, №41, 1989, сс. 15-28]. денсатора. Якщо величина стискального зусилля Позитивний ефект та техніко-економічні пересхвата є недостатньою для надійного утримання ваги запропонованого технічного рішення в порівдеталі, то в момент спробного руху деталь нянні з а.с. СРСР №1546833 полягають в більш починає проковзувати відносно губок схвата адаппростому конструктивному виконанні в порівнянні з тивного робота, а циліндричний ролик 4, робоча прототипом за рахунок виконання активного елеповерхня якого виконана з еластичного матеріалу менту системи реєстрації сигналу проковзування у з високим коефіцієнтом тертя, повертається наввигляді двохсекційного конденсатора спеціальної коло своєї осі, відповідно повертаючи рухому обконструкції, обкладки якого розташовані в безпокладку 5 двохсекційного конденсатора. При цьому середній близькості одна від другої, що також дозмінюється площа перекриття рухомою обкладкою зволяє зменшити габарити і масу датчика. Крім 5 верхньої і нижньої нерухомих обкладок 6 і в того, датчик проковзування має підвищену перешрезультаті змінюється ємність двохсекційного конкодостійкість, що забезпечується використанням денсатора. Вимірювальний блок 8 фіксує цю зміну замість двох постійних магнітів, магнітного конценємності і на його виході, що є виходом датчика, тратора і датчика Холла одного поворотного двохформується сигнал, що свідчить про наявність секційного конденсатора, що не реагує на зміну проковзування деталі і необхідність нарощування магнітної проникності захоплюваної деталі і серезначення стискального зусилля адаптивним рободовища функціонування адаптивного робота, що том. Датчик проковзування буде працювати також значно розширює його функціональні можаналогічним чином при реалізації кожного нового ливості та забезпечує універсальність в експлуа 7 15635 8 тації. Простота виготовлення датчика за рахунок тання підвищує технологічність його конструкції, відмови від магнітних систем з концентратором значно знижуючи при цьому вартість його виготовмагнітного поля у вигляді сегменту еліпсоїда оберлення в порівнянні з прототипом. Комп’ютерна верстка Л. Купенко Підписне Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюSensor of slippage of adaptive robot
Автори англійськоюKondratenko Yurii Panteliiovych, Kondratenko Volodymyr Yuriiovych
Назва патенту російськоюДатчик проскальзывания адаптивного робота
Автори російськоюКондратенко Юрий Пантелеевич, Кондратенко Владимир Юрьевич
МПК / Мітки
МПК: B25J 19/02
Мітки: проковзування, датчик, адаптивного, робота
Код посилання
<a href="https://ua.patents.su/4-15635-datchik-prokovzuvannya-adaptivnogo-robota.html" target="_blank" rel="follow" title="База патентів України">Датчик проковзування адаптивного робота</a>
Пристрій для реєстрації сигналу проковзування
Номер патенту: 14566
Опубліковано: 15.05.2006
Автори: Кондратенко Юрій Пантелійович, Шишкін Олександр Сергійович, Кондратенко Володимир Юрійович
МПК: B25J 19/02
Мітки: сигналу, проковзування, реєстрації, пристрій
Формула / Реферат:
Пристрій для реєстрації сигналу проковзування, що містить датчик проковзування, встановлений принаймні на одній з губок кліщів робота, кожна з яких зв'язана із приводом їх переміщення, підключеним до блока керування, і виконаний у вигляді ролика з інформаційними елементами, розташованими паралельно осі обертання ролика, джерела і приймача світла, зв'язаних з блоком керування, який відрізняється тим, що датчик проковзування оснащений...
Пристрій для адаптивного керування процесом металообробки
Номер патенту: 35845
Опубліковано: 16.04.2001
Автор: Коцюбинський Віктор Семенович
МПК: G05B 13/02
Мітки: металообробки, адаптивного, пристрій, керування, процесом
Формула / Реферат:
Пристрій для адаптивного керування процесом металообробки, до складу якого входить блок завдання, вихід якого з'єднаний з першим входом суматора , вихід суматора з'єднаний зі входом електроприводу подачі, підключеного виходом зі входом датчика швидкості подачі, і зі входом редуктора приводу подачі, вихід редуктора з'єднаний із верстатом, який містить електродвигун приводе шпинделя верстати, який містить датчик потужності, вихід якого...
Адаптивний захватний пристрій інтелектуального робота

Номер патенту: 14569
Опубліковано: 15.05.2006
Автори: Кондратенко Юрій Пантелійович, Швець Едуард Анатолійович
МПК: B25J 15/00
Мітки: пристрій, адаптивний, робота, захватний, інтелектуального
Формула / Реферат:
Адаптивний захватний пристрій інтелектуального робота, що містить кінематично зв'язані з приводом губки, принаймні на одній з яких встановлено перший і другий датчики стискального зусилля, зв'язані з блоком керування приводом губок, інтерфейс якого містить чотири входи і чотири виходи, у губках виконані напрямні пази, у яких з можливістю переміщення встановлені пружно зв'язані з відповідною губкою рухливі елементи, які мають можливість...
Пристрій для адаптивного керування процесом металообробки
Номер патенту: 19650
Опубліковано: 25.12.1997
Автори: Романець Роман Анатолійович, Коцюбинський Віктор Семенович, Карпенко Валерій Миколайович, Закутний Олександр Степанович
МПК: G05B 13/02
Мітки: пристрій, керування, адаптивного, металообробки, процесом
Формула / Реферат:
Устройство для адаптивного управления процессом металлообработки, содержащее блок задания, выход которого соединен с первым входом сумматора, выход сумматора соединен с входом электропривода подачи, подключенного выходом к входу датчика скорости привода подачи, и к входу редуктора привода подачи, выход редуктора соединен со станком, который содержит электродвигатель привода шпинделя станка, который содержит датчик мощности, выход которого...
Датчик рівня
Номер патенту: 36135
Опубліковано: 16.04.2001
Автори: Панченко Володимир Іванович, Панченко Іван Володимирович, Панченко Тарас Володимирович
МПК: G01F 23/00
Текст:
...роботи датчика рівня. Для повернення датчика у вихідний стан служить механізм вихідного положення 3. Оскільки датчик може знаходитися у важкодоступних місцях, для забезпечення візуального контролю роботи датчика служить пристрій контролю 6, для чого вихід безконтактного датчика 4 сполучений також із блоком контролю 6, що складається з комутатора 7 для перемикання перевірки трактів проходження корисного сигналу по всьому ланцюгу і ланцюгу без...
Попередній патент: Спосіб рятування людей з гідротехнічних споруд
Наступний патент: Спосіб формування звукового фрагмента пристроїв мовного супроводжування світлофорної сигналізації
Випадковий патент: Спосіб визначення флавоноїдів у траві рутки лікарської