Пристрій для керування адаптивним роботом
Номер патенту: 31511
Опубліковано: 10.04.2008
Автори: Марковський Ігор Володимирович, Кондратенко Юрій Пантелійович, Кондратенко Галина Володимирівна, Чернов Сергій Констянтинович, Кондратенко Володимир Юрійович
Формула / Реферат
Пристрій для керування адаптивним роботом, що містить захватний орган, дві затискні губки, послідовно з'єднані датчик проковзування, перший підсилювач, диференціатор, пороговий елемент, вихід якого з'єднаний з S-входом першого RS-тригера, R-вхід якого призначений для сприйняття імпульсу запуску, елемент І, перший і другий входи якого з'єднані з виходами тактильних датчиків, встановлених на затискних губках, і приводи стискання губок та підйому захватного органа, який відрізняється тим, що введено елемент АБО, Т-тригер, другий RS-тригер, другий, третій та четвертий підсилювачі, підсилювач-інвертор, суматор і привід горизонтального переміщення захватного органа, при цьому перший і другий входи елемента АБО з'єднані з виходами тактильних датчиків, а вихід - з рахунковим входом Т-тригера, вихід якого з'єднаний з входом другого підсилювача, вихід якого підключений до першого входу суматора, вихід якого підключено до входу приводу горизонтального переміщення, вихід елемента І з'єднано із входом обнуління Т-тригера, з входом третього підсилювача, вихід якого підключено до входу приводу підйому захватного органа, і з S-входом другого RS-тригера, вихід якого з'єднаний із входом підсилювача-інвертора, вихід якого підключений до другого входу суматора, а R-вхід другого RS-тригера з'єднаний з R-входом першого RS-тригера, вихід якого з'єднаний із входом четвертого підсилювача, вихід якого з'єднаний із входом приводу стискання губок.
Текст
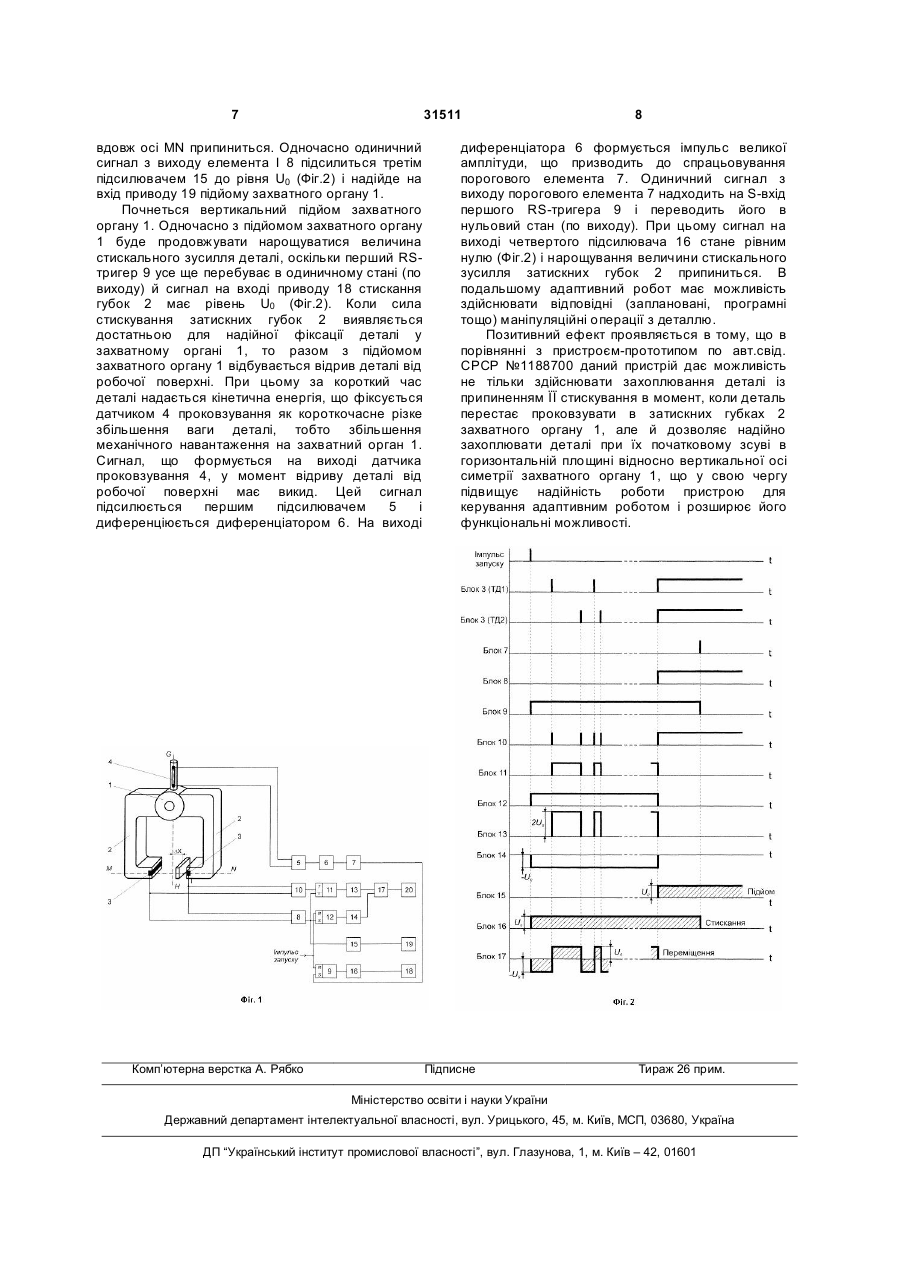
ПристрійUA керування адаптивним роботом, МАКАРОВА, для що містить захватний орган, дві затискні губки, послідовно з'єднані датчик проковзування, перший підсилювач, диференціатор, пороговий елемент, вихід якого з'єднаний з S-входом першого RSтригера, R-вхід якого призначений для сприйняття імпульсу запуску, елемент І, перший і другий входи якого з'єднані з виходами тактильних датчиків, встановлених на затискних губках, і приводи U 2 (19) 1 3 і обмотки збудження. Такий пристрій має наступні проблеми: - обмеженість використання пристрою в умовах наявності в зоні його функціонування паразитних магнітних полів та збурень вібраційного характеру; - необхідність попереднього центрування деталі відносно губок захватного органу для виключення зміщення деталі перед її підйомом; - низька надійність пристрою через наявність в його конструкції значної кількості рухливих елементів. Найбільш близьким до запропонованого є датчик для реєстрації проковзування предмета [Авт.свід. СРСР №1188700, МКІ G05В19/00, опубл. Бюл. №40, 1985], що прийнятий як прототип. Пристрій для керування адаптивним роботом містить захватний орган з губками, блок задавання програми, тактильні датчики, перший і другий приводи відповідно для стискання губок та підйому захватного органу, датчик проковзування, послідовно з'єднані підсилювач, диференціатор, пороговий елемент, RS-тригер, елемент ЗАПЕРЕЧЕННЯ й перший ключ, а також послідовно підключені елемент І й другий ключ, вихід якого з'єднаний із входом другого приводу, а другий вхід - з першим виходом блоку задавання програми, підключеного другим виходом до другого входу RS-тригера, а третім виходом - до другого входу першого ключа, вихід якого з'єднаний із входом першого приводу стискання губок, вихід датчика проковзування з'єднаний із входом підсилювача, а виходи тактильних датчиків з'єднані з першим і другим входами елемента І. Такий датчик має наступні проблеми: здійснювати пристрій дозволяє захоплювання деталей, розташованих тільки симетрично відносно губок захватного органа, що пов'язано з необхідністю попереднього центрування деталі відносно губок захватного органу перед її підйомом; - низька надійність пристрою, оскільки будьякий зсув деталі в горизонтальній площині відносно вертикальної осі симетрії захватного органа в процесі її захоплювання приведе, в першу чергу, до контакту деталі тільки з однією з губок й при подальшому стискуванні губок може викликати перекидання чи деформацію деталі або пошкодження захватного органа. В основу корисної моделі поставлено задачу удосконалення пристрою для керування адаптивним роботом шляхом введення додаткових електронних блоків обробки сигналів тактильних датчиків, що дозволить розширити функціональні можливості пристрою за рахунок забезпечення надійного захоплювання деталей, зміщених у горизонтальній площині відносно вертикальної осі симетрії захватного органу. Поставлена задача вирішується тим, що до складу пристрою для керування адаптивним роботом, що містить захватний орган, дві затискні губки, послідовно з'єднані датчик проковзування, перший підсилювач, диференціатор, пороговий елемент, вихід якого з'єднаний з S-входом першого RS-тригера, R-вхід якого призначений для сприйняття імпульсу запуску, елемент І, 31511 4 перший і другий входи якого з'єднані з виходами тактильних датчиків, встановлених на затискних губках, і приводи стискання губок та підйому захватного органу, згідно корисної моделі додатково введено елемент АБО. Т-тригер, другий RS-тригер, другий, третій та четвертий підсилювачі, підсилювач-інвертор, суматор і привід горизонтального переміщення захватного органу, при цьому перший і другий входи елемента АБО з'єднані з виходами тактильних датчиків, а вихід - з рахунковим входом Т-тригера, вихід якого з'єднаний з входом другого підсилювача, вихід якого з'єднаний з першим входом суматора, вихід якого підключено до входу привода горизонтального переміщення, вихід елемента І з'єднано із входом обнуління Ттригера, з входом третього підсилювача, вихід якого підключено до входу приводу підйому захватного органу, і з S-входом другого RSтригера, вихід якого з'єднаний із входом підсилювача-інвертора, вихід якого підключений до другого входу суматора, а R-вхід другого RSтригера з'єднаний з К-входом першого RS-тригера, вихід якого з'єднаний із входом четвертого підсилювача, вихід якого з'єднаний із входом приводу стискання губок. Винахідницький задум полягає в тому, що схемотехнічна особливість побудови пристрою для керування адаптивним роботом дозволяє забезпечувати процес самоцентрування захватного органу відносно деталі з невідомою масою, тобто в процесі захоплювання деталі, яка зміщена в горизонтальній площині відносно вертикальної осі захватного органу, буде постійно здійснюватись корекція положення захватного органа відносно нерухомої деталі до моменту одночасної появи сигналів контакту з деталлю на виходах обох тактильних датчиків, що суттєво підвищує надійність процесу захоплювання деталі. На Фіг.1 наведена функціональна схема пристрою для керування адаптивним роботом, а на Фіг.2 представлені часові діаграми вихідних сигналів окремих блоків пристрою для пояснення його роботи, де позначено: ТД1 - перший тактильний датчик; ТД2 - другий тактильний датчик. Пристрій містить захватний орган 1, дві затискні губки 2, тактильні датчики 3, датчик 4 проковзування, перший підсилювач 5, диференціатор 6, пороговий елемент 7, елемент 18, перший RS-тригер 9, елемент АБО 10, Ттригер 11, другий RS-тригер 12, другий підсилювач 13, підсилювач-інвертор 14, третій 15 і четвертий 16 підсилювачі, суматор 17, приводи 18, 19 й 20 відповідно стискання губок 2, підйому та горизонтального переміщення захватного органу 1. Датчик 4 проковзування підключений до першого підсилювача 5, що послідовно з'єднаний з диференціатором 6 та пороговим елементом 7, вихід якого з'єднаний з S-входом першого RSтригера 9. Входи тактильних датчиків 3 з'єднані з першим і другим входами елемента І 8 та з першим і другим входами елемента АБО 10, вихід якого підключений до рахункового входу Т-тригера 11. Вихід Т-тригера 11 з'єднаний із входом другого підсилювача 13, вихід якого підключений до 5 першого входу суматора 17. Вихід суматора 17 з'єднаний із входом приводу 20 горизонтального переміщення захватного органу 1. Вихід елемента І 8 з'єднаний з входом обнуління Т-тригера 11, Sвходом другого RS-тригера 12 та входом третього підсилювача 15. Вихід другого RS-тригера 12 через підсилювач-інвертор 14 підключений до другого входу суматора 17. Вихід третього підсилювача 15 підключений до входу приводу 19 підйому захватного органу 1. R-входи першого RSтригера 9 та другого RS-тригера 12 підключені до генератора імпульсу запуску (генератор на Фіг.1 не показано). Вихід першого RS-тригера 9 з'єднаний з входом четвертого підсилювача 16, вихід якого з'єднаний з входом приводу 18 стискання губок 2. Коефіцієнт підсилення другого підсилювача 20 встановлюється у два рази більшим за значення коефіцієнта підсилення підсилювача-інвертора 14. Запропонований пристрій працює таким чином. У первинному стані адаптивний робот підводить захватний орган 1 до деталі, яку в подальшому необхідно захопити з величиною стискального зусилля губок 2, що відповідає апріорно невідомій масі деталі. Деталь перебуває, наприклад, на робочій поверхні стола, стрічки конвейєра тощо й (у загальному випадку) має лінійний зсув Dх в горизонтальній площині (Фіг.1) щодо вертикальної осі симетрії GH захватного органу 1. Тобто деталь розташована несиметрично відносно затискних губок 2 захватного органу 1, оскільки відстані від вертикальної осі деталі до робочих поверхонь лівої і правої затискних губок 2 є різними. Затискні губки 2 захватного органу 1 знаходяться при цьому в розведеному стані. Сигнали на виходах тактильних датчиків 3 відсутні, на виходах елементів І 8 й АБО 10 встановлено нульовий сигнал "0". Т-тригер 11, перший 9 та другий 12 RSтригери перебувають у нульовому стані, тобто на їх виходах встановлено нульові сигнали "0", а на виходах приводів 18, 19, 20, відповідно, стискання губок 2, підйому та горизонтального переміщення захватного органу 1 сигнали відсутні. Пристрій здійснює керування адаптивним роботом в процесі автоматичного захоплювання деталі при появі імпульсу запуску на R-входах першого і другого RS-тригерів 9 й 12, що переводить вихідні сигнали першого і другого RS-тригерів 9 й 12 в одиничний стан (Фіг.2). Одиничний сигнал з виходу першого RS-тригера 9 підсилюється четвертим підсилювачем 16 до рівня U0 (Фіг.2) і надходить на привід 18 стискання губок 2. Привід 18 починає стискати затискні губки 2 захватного органу 1. Одночасно одиничний сигнал з виходу другого RSтригера 12 інвертується й підсилюється підсилювачем-інвертором 14 до рівня -U0 (Фіг.2) і надходить на другий вхід суматора 17. На першому вході суматора 17 при цьому буде нульовий сигнал, оскільки Т-тригер 11 на даний момент (по виходу) поки ще перебуває в нульовому стані. Тоді з виходу суматора 17 на вхід приводу 20 горизонтального переміщення захватного органу 1 надійде сигнал рівня -U0. Привід 20 горизонтального переміщення почне зміщувати захватний орган 1 у горизонтальному 31511 6 напрямку вподовж осі MN (Фіг.1), причому початковий напрямок руху може бути будь-яким і не впливає на роботу пристрою. Оскільки деталь зміщена в горизонтальній площині щодо вертикальної осі симетрії GH захватного органу 1 (Фіг.1), то при горизонтальному переміщенні захватного органу 1 й одночасному стисканні затискних губок 2 у відповідний момент часу відбудеться торкання поверхні деталі тільки однією з губок 2 та одним відповідним тактильним датчиком 3, сигнал з виходу якого через елемент АБО 10 надійде на рахунковий вхід Т-тригера 11 і змінить його вихідний стан з нульового на одиничний (Фіг.2). Одиничний сигнал з Т-тригера 11, підсилений другим підсилювачем 13 до рівня 2U0 (Фіг.2), надходить на перший вхід суматора 17, на другому вході якого як і раніше зберігається рівень сигналу -U0. Тоді на виході суматора 17 формується сигнал U0=2U0-U0, що поступає на вхід приводу 20 горизонтального переміщення. Привід 20 при цьому змінить напрямок горизонтального переміщення захватного органу 1 на протилежний (Фіг.2). Затискні губки 2 як і раніше продовжують стискатися, але захватний орган 1 буде переміщуватися (в протилежну сторону) вздовж осі MN (Фіг.1) до моменту торкання поверхнею деталі іншої затискної губки 2 та, відповідно, другого тактильного датчика 3, сигнал з якого, пройшовши елемент АБО 10, поверне Ттригер 11 (по виходу) у нульовий стан (Фіг.2). При цьому на першому вході суматора 17 знову встановлюється сигнал нульового рівня, а оскільки другий RS-тригер 12 зберігає (по виходу) одиничний стан і на виході підсилювача-інвертора 14 сигнал як і раніше має рівень U0, то з виходу суматора 17 на вхід приводу 20 горизонтального переміщення надходить сигнал рівня U0 (Фіг.2). Привід 20 горизонтального переміщення знову змінить напрямок руху захватного органу 1 вдовж осі MN на протилежний й у подальшому процес зміни напрямку горизонтального переміщення захватного органу 1 з одночасним стискуванням затискних губок 2 буде багаторазово повторюватися. Це дозволить здійснити симетричне позиціювання захватного органу 1 відносно деталі, при якому деталь буде розташовуватися симетрично щодо вертикальної осі симетрії GH захватного органу 1. Реверсивний рух захватного органу 1 у горизонтальному напрямку при одночасному стискуванні затискних губок 2 буде тривати доти поки не спрацюють одночасно обидва тактильних датчики 3, тобто поки обидві затискні губки 2 одночасно не торкнутися поверхні деталі. Тоді одиничні сигнали з виходів тактильних датчиків 3 надійдуть на входи елемента І 8 й переведуть його (по виходу) в одиничний стан (Фіг.2). Одиничний сигнал з виходу елемента І 8 надійде на S-вхід другого RS-тригера 12 і на вхід обнуління Т-тригера 11, переводячи їх у нульовий стан по виходам. Тоді на входах і відповідно на виході суматора 17 сигнали будуть дорівнювати нулю і відповідно буде дорівнювати нулю сигнал на вході приводу 20 горизонтального переміщення захватного органу 1 (Фіг.2). Горизонтальне переміщення захватного органу 1 7 31511 вдовж осі MN припиниться. Одночасно одиничний сигнал з виходу елемента І 8 підсилиться третім підсилювачем 15 до рівня U0 (Фіг.2) і надійде на вхід приводу 19 підйому захватного органу 1. Почнеться вертикальний підйом захватного органу 1. Одночасно з підйомом захватного органу 1 буде продовжувати нарощуватися величина стискального зусилля деталі, оскільки перший RSтригер 9 усе ще перебуває в одиничному стані (по виходу) й сигнал на вході приводу 18 стискання губок 2 має рівень U0 (Фіг.2). Коли сила стискування затискних губок 2 виявляється достатньою для надійної фіксації деталі у захватному органі 1, то разом з підйомом захватного органу 1 відбувається відрив деталі від робочої поверхні. При цьому за короткий час деталі надається кінетична енергія, що фіксується датчиком 4 проковзування як короткочасне різке збільшення ваги деталі, тобто збільшення механічного навантаження на захватний орган 1. Сигнал, що формується на виході датчика проковзування 4, у момент відриву деталі від робочої поверхні має викид. Цей сигнал підсилюється першим підсилювачем 5 і диференціюється диференціатором 6. На виході Комп’ютерна верстка А. Рябко 8 диференціатора 6 формується імпульс великої амплітуди, що призводить до спрацьовування порогового елемента 7. Одиничний сигнал з виходу порогового елемента 7 надходить на S-вхід першого RS-тригера 9 і переводить його в нульовий стан (по виходу). При цьому сигнал на виході четвертого підсилювача 16 стане рівним нулю (Фіг.2) і нарощування величини стискального зусилля затискних губок 2 припиниться. В подальшому адаптивний робот має можливість здійснювати відповідні (заплановані, програмні тощо) маніпуляційні операції з деталлю. Позитивний ефект проявляється в тому, що в порівнянні з пристроєм-прототипом по авт.свід. СРСР №1188700 даний пристрій дає можливість не тільки здійснювати захоплювання деталі із припиненням ЇЇ стискування в момент, коли деталь перестає проковзувати в затискних губках 2 захватного органу 1, але й дозволяє надійно захоплювати деталі при їх початковому зсуві в горизонтальній площині відносно вертикальної осі симетрії захватного органу 1, що у свою чергу підвищує надійність роботи пристрою для керування адаптивним роботом і розширює його функціональні можливості. Підписне Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for control of adaptive robot
Автори англійськоюKondratenko Yurii Panteliiovych, Kondratenko Volodymyr Yuriiovych, Markovskyi Ihor Volodymyrovych, Kondratenko Halyna Volodymyrivna, Chernov Serhii Konstiantynovych
Назва патенту російськоюУстройство для управления адаптивным роботом
Автори російськоюКондратенко Юрий Пантелеевич, Кондратенко Владимир Юрьевич, Марковский Игорь Владимирович, Кондратенко Галина Владимировна, Чернов Сергей Константинович
МПК / Мітки
МПК: G05B 19/00, B25J 19/02
Мітки: керування, адаптивним, пристрій, роботом
Код посилання
<a href="https://ua.patents.su/4-31511-pristrijj-dlya-keruvannya-adaptivnim-robotom.html" target="_blank" rel="follow" title="База патентів України">Пристрій для керування адаптивним роботом</a>
Демонстраційна модель мікроконтролерної системи стабілізації тиску маслостанції у системі керування роботом

Номер патенту: 24487
Опубліковано: 10.07.2007
Автори: Ломонос Андрій Іванович, Пащенко Роман Олександрович, Бялобрежський Олексій Володимирович
МПК: F04D 15/00
Мітки: тиску, системі, маслостанції, роботом, мікроконтролерної, модель, стабілізації, керування, демонстраційна
Формула / Реферат:
Демонстраційна модель мікроконтролерної системи стабілізації тиску маслостанції у системі керування роботом, що містить насосний агрегат, привідний електродвигун насосного агрегату з'єднаний з перетворювачем частоти, обчислювальний блок, блок відображення інформації, блок зв'язку виходів датчиків з обчислювальним блоком, датчики тиску і витрат встановлені на виході насосного агрегату, датчик швидкості розташований на одному валу з електричним...
Пристрій керування

Номер патенту: 65665
Опубліковано: 15.04.2004
Автори: Чигирин Олег Трохимович, Чигирин Юрій Трохимович, Маранов Олександр Вікторович
МПК: G06F 11/00
Формула / Реферат:
Пристрій керування, що складається з багаторозрядного цифрового лічильного каналу, дешифратора, схеми керування, яка включає формувач і два елементи затримки, і генератора, вихід якого з'єднано з першими входами першого багаторозрядного цифрового лічильного каналу, схеми керування і дешифратора, вихід якого з'єднано з виходом пристрою керування, вхід схеми керування через перший елемент затримки, перший формувач і другий елемент затримки...
Пристрій керування ваговим порціонним дозуванням
Номер патенту: 10917
Опубліковано: 15.12.2005
Автор: Поповкін Юрій Матвійович
МПК: G01G 13/00
Мітки: дозуванням, пристрій, порціонним, керування, ваговим
Формула / Реферат:
Пристрій керування ваговим порціонним дозуванням, що містить реверсивний лічильник, з’єднаний через дешифратор із задатчиком програми, дві логічні схеми I, схему НI, тригер пам’яті, який відрізняється тим, що він оснащений двома схемами I, реверсивним лічильником, двома схемами порівнянння, дешифратором, комутатором, задатчиками програми, трьома схемами НI, тензодатчиком, аналого-цифровим перетворювачем, по входу з’єднаним з тензодатчиком,...
Пристрій дистанційного керування електролампами
Номер патенту: 36793
Опубліковано: 16.04.2001
Автори: Лаптєв Анатолій Іванович, Блиндюк Петро Михайлович, Жук Олександр Дмитрович, Рибчинський Юхим Борисович, Антонюк Павло Дмитрович
МПК: H05B 39/00
Мітки: керування, пристрій, електролампами, дистанційного
Формула / Реферат:
Пристрій дистанційного керування електролампами, що містить кнопки керування з замикаючим контактом, силовий ключ, світлові індикатори та їх резистори перші, який відрізняється тим, що введені джерело низької напруги, формувач імпульсів, тригер, підсилювач, резистор другий, слабкострумове реле та його два замикаючі контакти і реле часу, причому джерело низької напруги по першому входу з’єднано з фазним проводом електросітки, а по першому...
Пристрій для автоматичного керування деревообробкою
Номер патенту: 29640
Опубліковано: 25.01.2008
Автори: Коропалов Сергій Анатолійович, Осадчий Сергій Іванович, Шаповалова Ірина Анатоліївна
МПК: G05B 13/02
Мітки: керування, пристрій, автоматичного, деревообробкою
Формула / Реферат:
Пристрій для автоматичного керування деревообробкою, який містить електропривод подачі, другий вхід якого з'єднаний з входом блока обмеження швидкості подачі, вихід електроприводу подачі підключений до входу редуктора приводу подачі, вихід редуктора з'єднаний з об'єктом керування, який містить електропривод головного руху, вихід якого з'єднаний з входом датчика струму, вихід якого з'єднаний з випрямлячем, який містить згладжуючий фільтр,...
Попередній патент: Мікроелектронний сенсор температури
Наступний патент: Спосіб введення медикаментів дітям із сенсоневральною приглухуватістю
Випадковий патент: Датчик порізу сумки