Спосіб маніпулювання
Номер патенту: 9802
Опубліковано: 17.10.2005
Автори: Заєць Сергій Сергійович, Максимчук Іван Вікторович, Тимчик Григорій Семенович
Формула / Реферат
Спосіб маніпулювання для отримання з'єднань деталей типу вал-втулка, при якому втулку закріплюють нерухомо, а вал орієнтують за допомогою захоплювальних пристроїв та центрують в захваті, транспортують в зону складання, підтискають до робочої поверхні втулки, надають їй пошуковий рух, при цьому реєструють зменшення зусиль підтискання під час збігу з'єднувальних поверхонь, при якому проводять процес складання, який відрізняється тим, що задають закон траєкторії пошукового руху з максимальною амплітудою, при цьому реєструють зменшення зусиль підтискання, змінюють амплітуду пошукового руху, задають переміщення по осі з'єднання і проводять процес складання деталей типу вал-втулка при мінімальному значенні амплітуди.
Текст
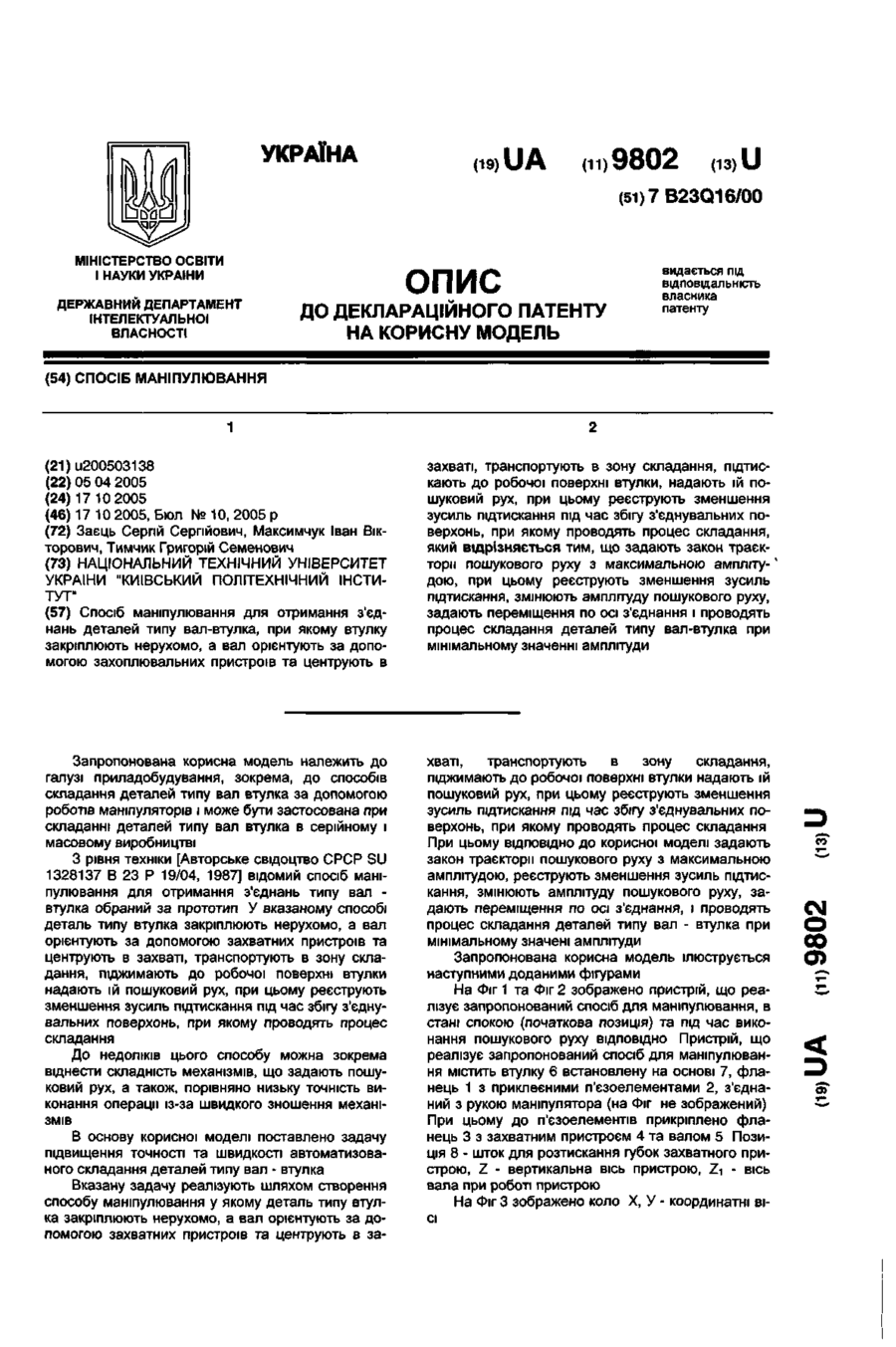
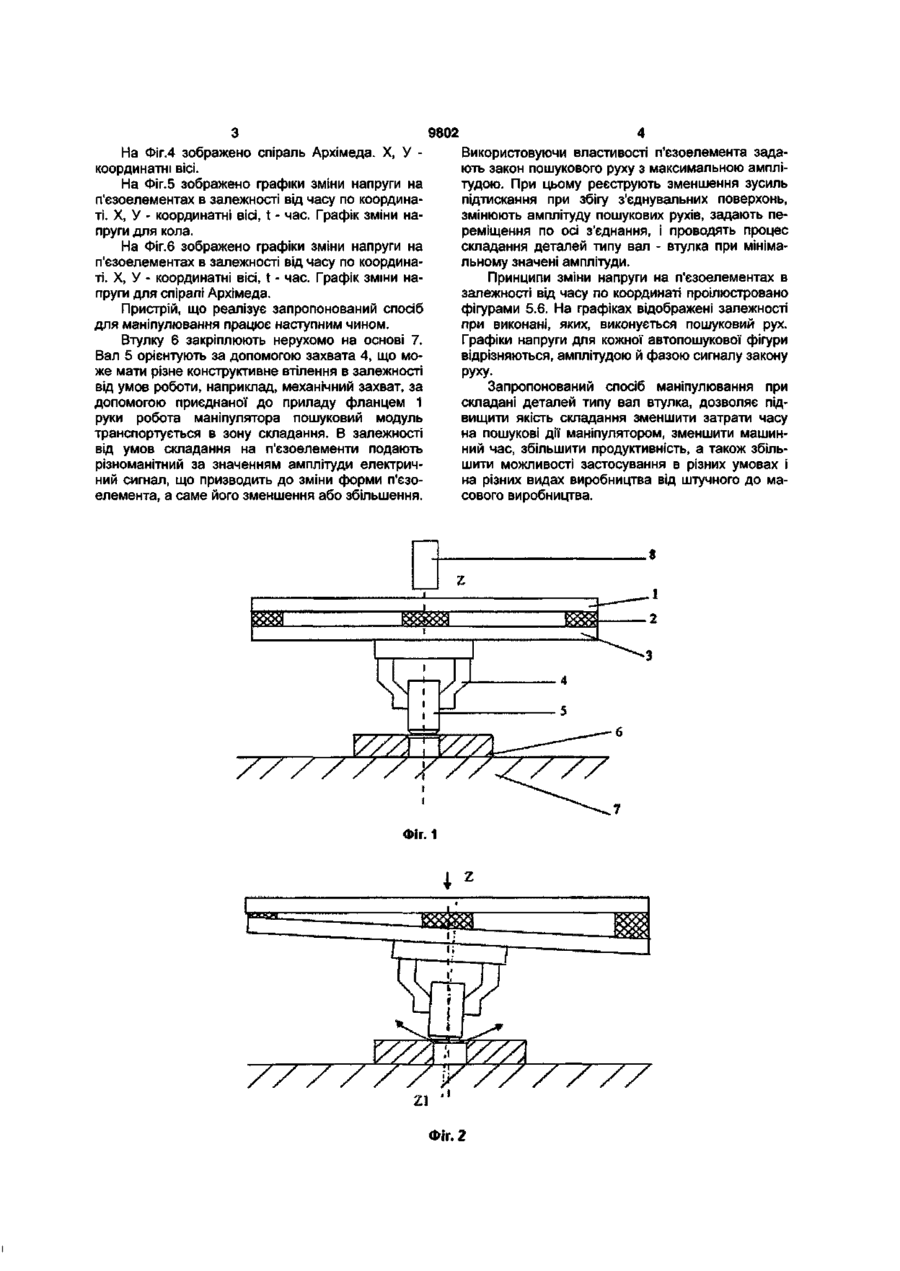
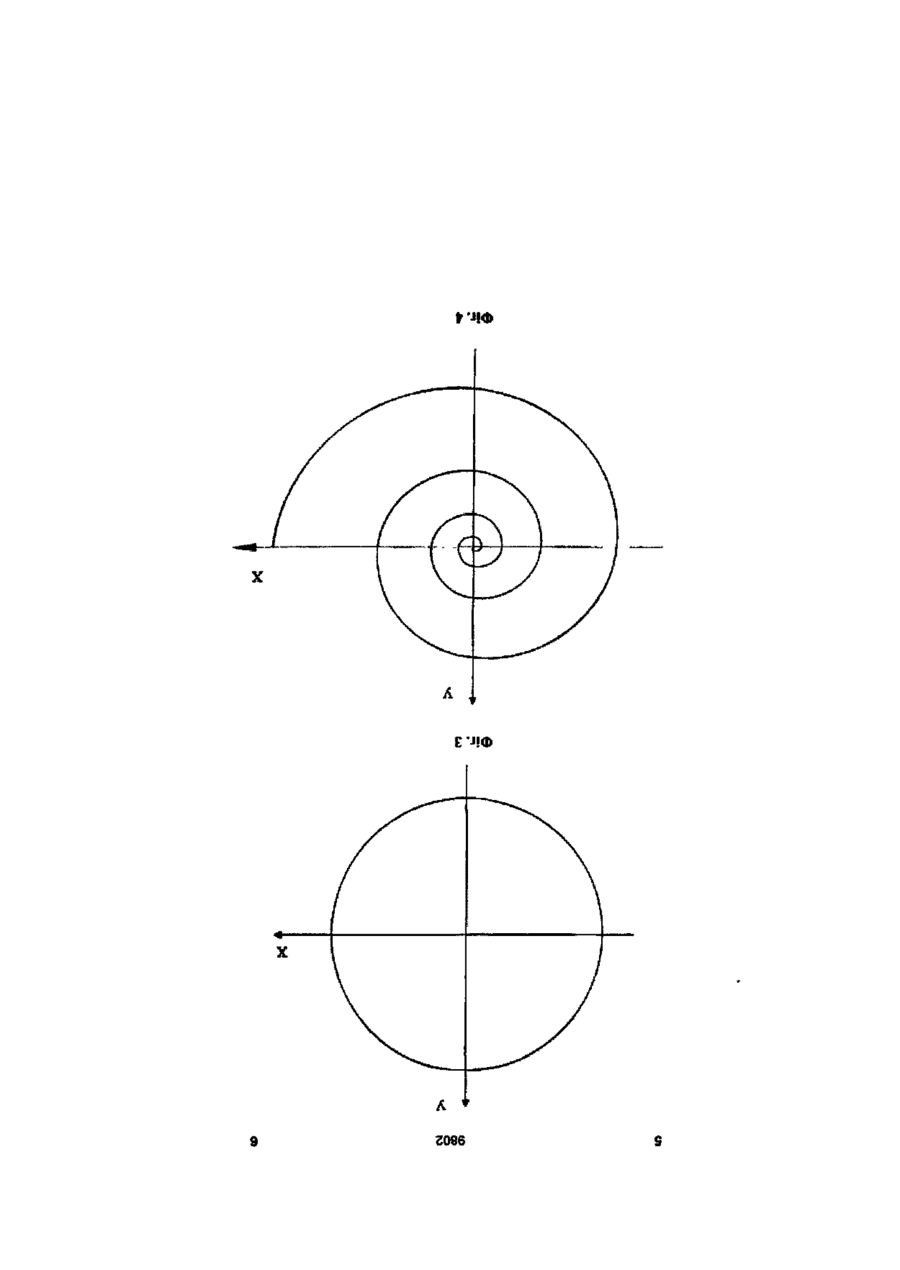
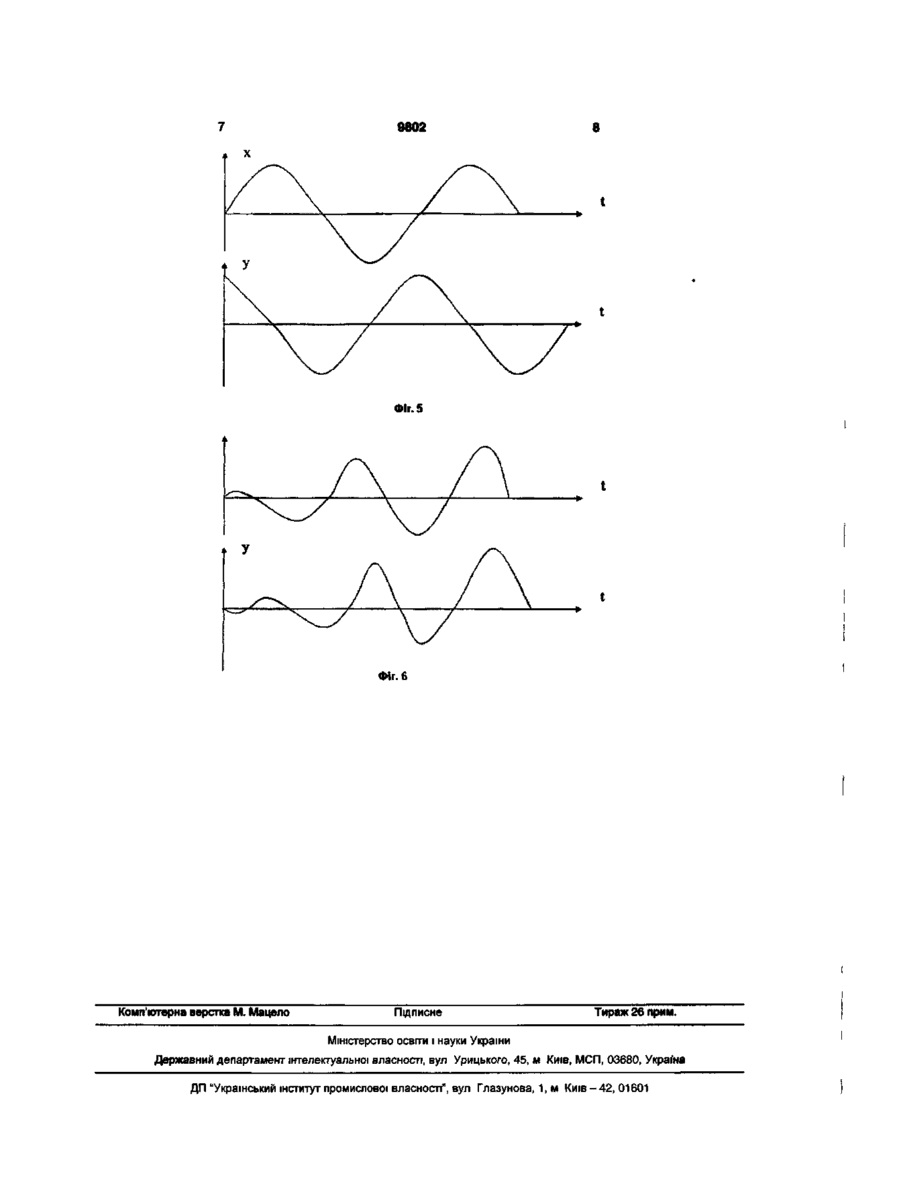
Спосіб маніпулювання для отримання з'єднань деталей типу вал-втулка, при якому втулку закріплюють нерухомо, а вал орієнтують за допомогою захоплювальних пристроїв та центрують в захваті, транспортують в зону складання, підтискають до робочої поверхні втулки, надають їй пошуковий рух, при цьому реєструють зменшення зусиль підтискання під час збігу з'єднувальних поверхонь, при якому проводять процес складання, який відрізняється тим, що задають закон траєкторії пошукового руху з максимальною амплітудою, при цьому реєструють зменшення зусиль підтискання, змінюють амплітуду пошукового руху, задають переміщення по осі з'єднання і проводять процес складання деталей типу вал-втулка при мінімальному значенні амплітуди Запропонована корисна модель належить до галузі приладобудування, зокрема, до способів складання деталей типу вал втулка за допомогою роботів маніпуляторів і може бути застосована при складанні деталей типу вал втулка в серійному і масовому виробництві З рівня техніки [Авторське свідоцтво СРСР SU 1328137 В 23 Р 19/04, 1987] відомий спосіб маніпулювання для отримання з'єднань типу вал втулка обраний за прототип У вказаному способі деталь типу втулка закріплюють нерухомо, а вал орієнтують за допомогою захватних пристроїв та центрують в захваті, транспортують в зону складання, піджимають до робочої поверхні втулки надають їй пошуковий рух, при цьому реєструють зменшення зусиль підтискання під час збігу з'єднувальних поверхонь, при якому проводять процес складання До недоліків цього способу можна зокрема віднести складність механізмів, що задають пошуковий рух, а також, порівняно низьку точність виконання операції із-за швидкого зношення механізмів В основу корисної моделі поставлено задачу підвищення точності та швидкості автоматизованого складання деталей типу вал - втулка Вказану задачу реалізують шляхом створення способу маніпулювання у якому деталь типу втулка закріплюють нерухомо, а вал орієнтують за допомогою захватних пристроїв та центрують в за хваті, транспортують в зону складання, піджимають до робочої поверхні втулки надають їй пошуковий рух, при цьому реєструють зменшення зусиль підтискання під час збігу з'єднувальних поверхонь, при якому проводять процес складання При цьому ВІДПОВІДНО до корисної моделі задають закон траєкторії пошукового руху з максимальною амплітудою, реєструють зменшення зусиль підтискання, змінюють амплітуду пошукового руху, задають переміщення по осі з'єднання, і проводять процес складання деталей типу вал - втулка при мінімальному значені амплітуди Запропонована корисна модель ілюструється наступними доданими фігурами На Фіг 1 та Фіг 2 зображено пристрій, що peaлізує запропонований спосіб для маніпулювання, в стані спокою (початкова позиція) та під час виконання пошукового руху ВІДПОВІДНО Пристрій, що реалізує запропонований спосіб для маніпулювання містить втулку 6 встановлену на основі 7, фланець 1 з приклеєними п'єзоелементами 2, з'єднаний з рукою маніпулятора (на Фіг не зображений) При цьому до п'єзоелементів прикріплено фланець 3 з захватним пристроєм 4 та валом 5 Позиція 8 - шток для розтискання губок захватного пристрою, Z - вертикальна вісь пристрою, Zi - вісь вала при роботі пристрою На Фіг 3 зображено коло X, У - координатні ВІСІ 00 5Г 9802 Використовуючи властивості п'єзоелемента задають закон пошукового руху з максимальною амплітудою. При цьому реєструють зменшення зусиль підтискання при збігу з'єднувальних поверхонь, змінюють амплітуду пошукових рухів, задають переміщення по осі з'єднання, і проводять процес складання деталей типу вал - втулка при мінімальному значені амплітуди. Принципи зміни напруги на п'єзоелементах в залежності від часу по координаті проілюстровано фігурами 5.6. На графіках відображені залежності при виконані, яких, виконується пошуковий рух. Графіки напруги для кожної автопошукової фігури відрізняються, амплітудою й фазою сигналу закону руху. Запропонований спосіб маніпулювання при складані деталей типу вал втулка, дозволяє підвищити якість складання зменшити затрати часу на пошукові дії маніпулятором, зменшити машинний час, збільшити продуктивність, а також збільшити можливості застосування в різних умовах і на різних видах виробництва від штучного до масового виробництва. На Фіг.4 зображено спіраль Архімеда. X, У координатні вісі. На Фіг.5 зображено графіки зміни напруги на п'єзоелементах в залежності від часу по координаті. X, У - координатні вісі, t - час. Графік зміни напруги для кола. На Фіг.6 зображено графіки зміни напруги на п'єзоелементах в залежності від часу по координаті. X, У - координатні вісі, t - час. Графік зміни напруги для спіралі Архімеда. Пристрій, що реалізує запропонований спосіб для маніпулювання працює наступним чином. Втулку 6 закріплюють нерухомо на основі 7. Вал 5 орієнтують за допомогою захвата 4, що може мати різне конструктивне втілення в залежності від умов роботи, наприклад, механічний захват, за допомогою приєднаної до приладу фланцем 1 руки робота маніпулятора пошуковий модуль транспортується в зону складання. В залежності від умов складання на п'єзоелементи подають різноманітний за значенням амплітуди електричний сигнал, що призводить до зміни форми п'єзоелемента, а саме його зменшення або збільшення. / / / X //У / // Фіг. 1 /ZZUJZ/ZA ////¥////// Z1 Фіг. 2 9802 Фіг. 5 Фіг. 6 Комп'ютерна верстка М. Мацело Підписне Тираж 26 прим. Міністерство освгги і науки України Державний департамент інтелектуальної власності, вул Урицького, 45, м Київ, МСП, 03680, Україна ДП "Український інститут промислової власності", вул Глазунова, 1, м К и ї в - 4 2 , 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod of manipulation
Автори англійськоюZaiets Serhii Serhiiovych, Maksymchuk Ivan Viktorovych, Tymchyk Hryhorii Semenovych
Назва патенту російськоюСпособ манипулирования
Автори російськоюЗаец Сергей Сергеевич, Максимчук Иван Викторович, Тымчик Григорий Семенович
МПК / Мітки
МПК: B23Q 16/00
Мітки: маніпулювання, спосіб
Код посилання
<a href="https://ua.patents.su/4-9802-sposib-manipulyuvannya.html" target="_blank" rel="follow" title="База патентів України">Спосіб маніпулювання</a>
Пристрій для маніпулювання м’якими деталями
Номер патенту: 51982
Опубліковано: 16.12.2002
Автори: Драпак Георгій Мефодійович, Романець Тарас Петрович, Онофрійчук Володимир Іванович
МПК: B65H 3/22
Мітки: деталями, м'якими, маніпулювання, пристрій
Формула / Реферат:
Пристрій для маніпулювання м'якими деталями, який містить голкотримачі з голками, шарнірно закріплені в корпусі, який відрізняється тим, що голкотримачі додатково шарнірно з'єднані з підковоподібною пружною траверсою, а посередині корпусу розташований регулювальний гвинт, під яким розміщена підпружинена опорна планка, встановлена з можливістю вертикальних переміщень відносно корпусу, у поздовжніх пазах якої знаходяться вістря голок.
Спосіб маніпулювання з дрібнозернистою речовиною (варіанти) та пристрій для його здійснення
Номер патенту: 42709
Опубліковано: 15.11.2001
Автори: Уілльямсон Річард, Лейбі Дін М., Кавагнаро Річард Ф.
МПК: B65G 53/04, B65D 88/16
Мітки: здійснення, варіанти, пристрій, речовиною, дрібнозернистою, маніпулювання, спосіб
Формула / Реферат:
1.Способ манипулирования с мелкозернистым веществом, содержащим мелкую пыль, без выброса пыли, заключенным в мешок, расположенный в контейнере вторичного использования, включающий введение зонда в нижнюю часть указанного мешка, уплотнение его относительно мешка, флюидизирование мелкозернистого вещества внутри мешка с помощью вводимого газа через, по меньшей мере, одно инжекторное отверстие, разгрузку мелкозернистого вещества путем его...
Спосіб маніпулювання та порціонування довгих тістових форм, переважно локшини, та пристрій для його здійснення
Номер патенту: 41264
Опубліковано: 17.09.2001
Автори: Реш Хейнц, Зайлер Вернер, Еггер Фрідріх
МПК: A23L 1/16, B65B 35/50, B65B 35/44
Мітки: локшини, тістових, пристрій, порціонування, довгих, спосіб, форм, маніпулювання, переважно, здійснення
Формула / Реферат:
1. Способ манипулирования и порционирования длинных тестовых форм, преимущественно лапши, при котором тестовые формы изготавливают с помощью тестоформующего устройства в виде параллельных полос или рядов, высушивают, разрезают в отверженной форме на упаковочную длину и подготавливают для упаковки, отличающийся тем, что тестовые формы после разрезания переводят рядами непосредственно на упаковочный транспортер, укладывают слоями и собирают в...
Пристрій для маніпулювання ковшами
Номер патенту: 5764
Опубліковано: 29.12.1994
Автор: Джампетро Бенедетті
МПК: B22D 41/06
Мітки: ковшами, пристрій, маніпулювання
Формула / Реферат:
1. Устройство для манипулирования ковшами, преимущественно при непрерывной разливке, содержащее несущую конструкцию, по крайней мере две пары независимых коаксиальных рычагов, расположенных на несущей конструкции друг над другом с возможностью вращения на 360° относительно вертикальной оси, и средства удержания ковша, размещенные на рычагах, отличающееся тем, что, с целью расширения технологических возможностей за счет обеспечения...
Гвинт та монтажний інструмент для маніпулювання ним
Номер патенту: 26558
Опубліковано: 11.10.1999
Автор: Шустер Армін
МПК: F16B 23/00, B25B 15/00
Мітки: монтажний, маніпулювання, гвинт, інструмент, ним
Формула / Реферат:
1. Винт, содержащий гнездо или головку соответственно с внутренними или наружными элементами зацепления под монтажный инструмент, выполненными в виде чередующихся продольных выступов и впадин, участки боковой наружной поверхности которых выполнены цилиндрическими, отличающийся тем, что участки цилиндрической поверхности выполнены на выступах и/или впадинах, а поверхность между ними выполнена конической.2. Винт по п.1, отличающийся тем,...
Попередній патент: Гравітаційний двигун
Наступний патент: Пристрій для вимірювання вологості матеріалів з безперервним режимом роботи в часі
Випадковий патент: Світлодіодний світильник, захищений від дії зовнішнього середовища