Адаптивний захватний пристрій інтелектуального робота
Номер патенту: 26252
Опубліковано: 10.09.2007
Автори: Швець Едуард Анатолійович, Марковський Ігор Володимирович, Кондратенко Юрій Пантелійович, Чернов Сергій Костянтинович, Шишкін Олександр Сергійович, Кондратенко Володимир Юрійович
Формула / Реферат
Адаптивний захватний пристрій інтелектуального робота, що містить кінематично зв'язані з приводом губки, принаймні на одній з яких встановлено перший і другий датчики стискального зусилля, зв'язані з блоком керування приводом губок, у губках з можливістю плоскопаралельного та обертового переміщення встановлені пружно зв'язані з відповідною губкою рухливі елементи, які мають можливість взаємодії з першим датчиком стискального зусилля і другим датчиком, рухливі елементи виконано у вигляді встановлених на осях роликів, контактні поверхні яких покрито пружним еластичним матеріалом, який відрізняється тим, що в кожну губку введено пару жорстко зв'язаних між собою секторних елементів з зубчастими напрямними рейками, на торцевих поверхнях роликів жорстко закріплені відповідні зубчасті шестерні з можливістю обертання при повороті роликів, зубчасті шестерні виконано з діаметром, меншим від діаметра роликів, вісь кожного ролика шарнірно закріплена на відповідних кінцях двох рухливих планок, інші кінці яких шарнірно зв'язані з додатковою віссю, жорстко зв'язаною з відповідною парою секторних елементів, на зовнішніх дугах яких виконано зубці для забезпечення зубчастого зчеплення відповідних зубчастих напрямних рейок кожної пари секторних елементів з зубчастими шестернями відповідного ролика, вісь обертання кожної пари секторних елементів закріплена на корпусі відповідної губки паралельно осям обертання роликів з можливістю повороту секторних елементів при контакті роликів з деталлю, кожна додаткова вісь пружно зв'язана за допомогою принаймні однієї зворотної пружини секторних елементів з відповідною губкою, а кожна рухлива планка - з відповідним секторним елементом за допомогою зворотної пружини рухливої планки, причому принаймні одна пара секторних елементів зв'язана з другим датчиком, а принаймні одна рухлива планка - з першим датчиком стискального зусилля.
Текст
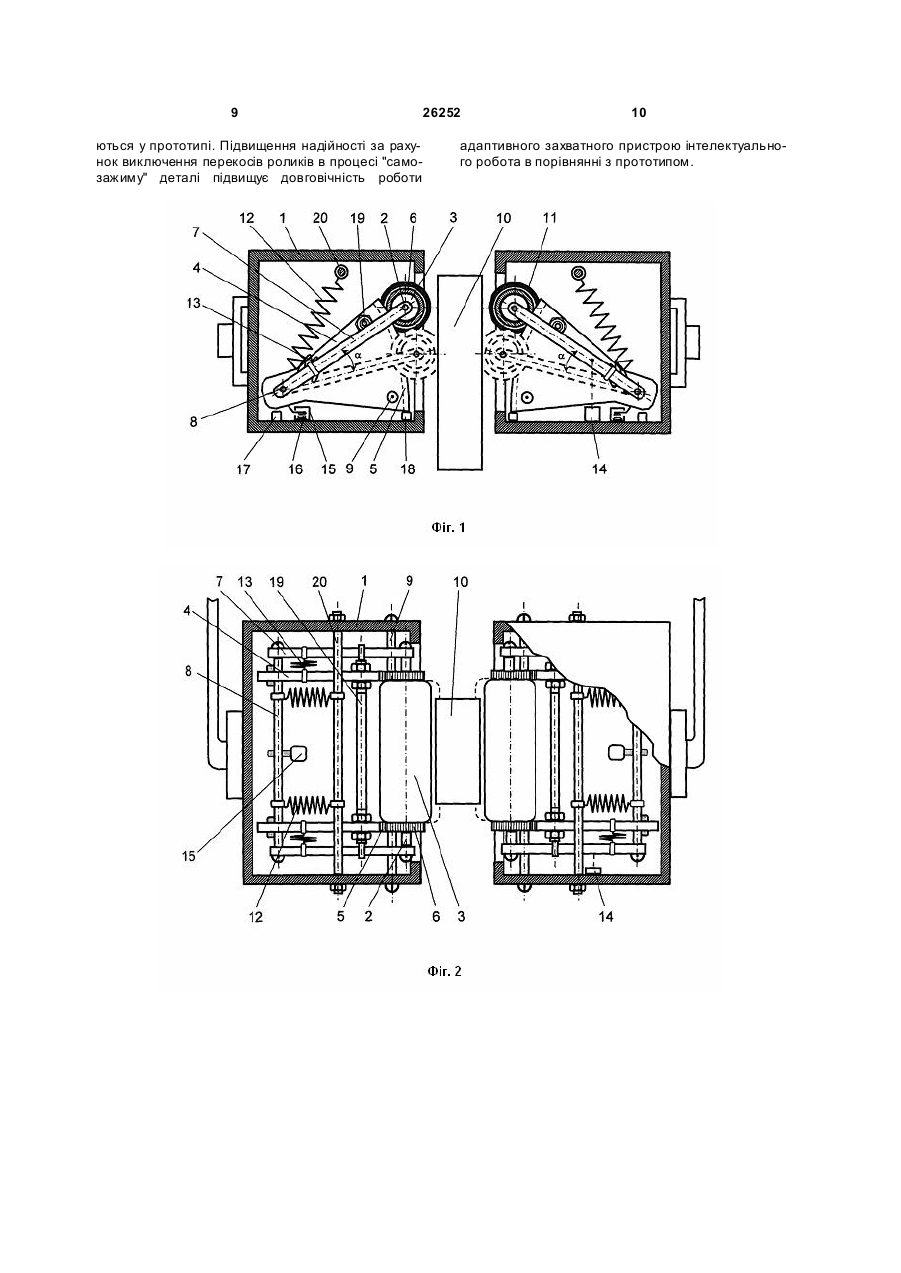
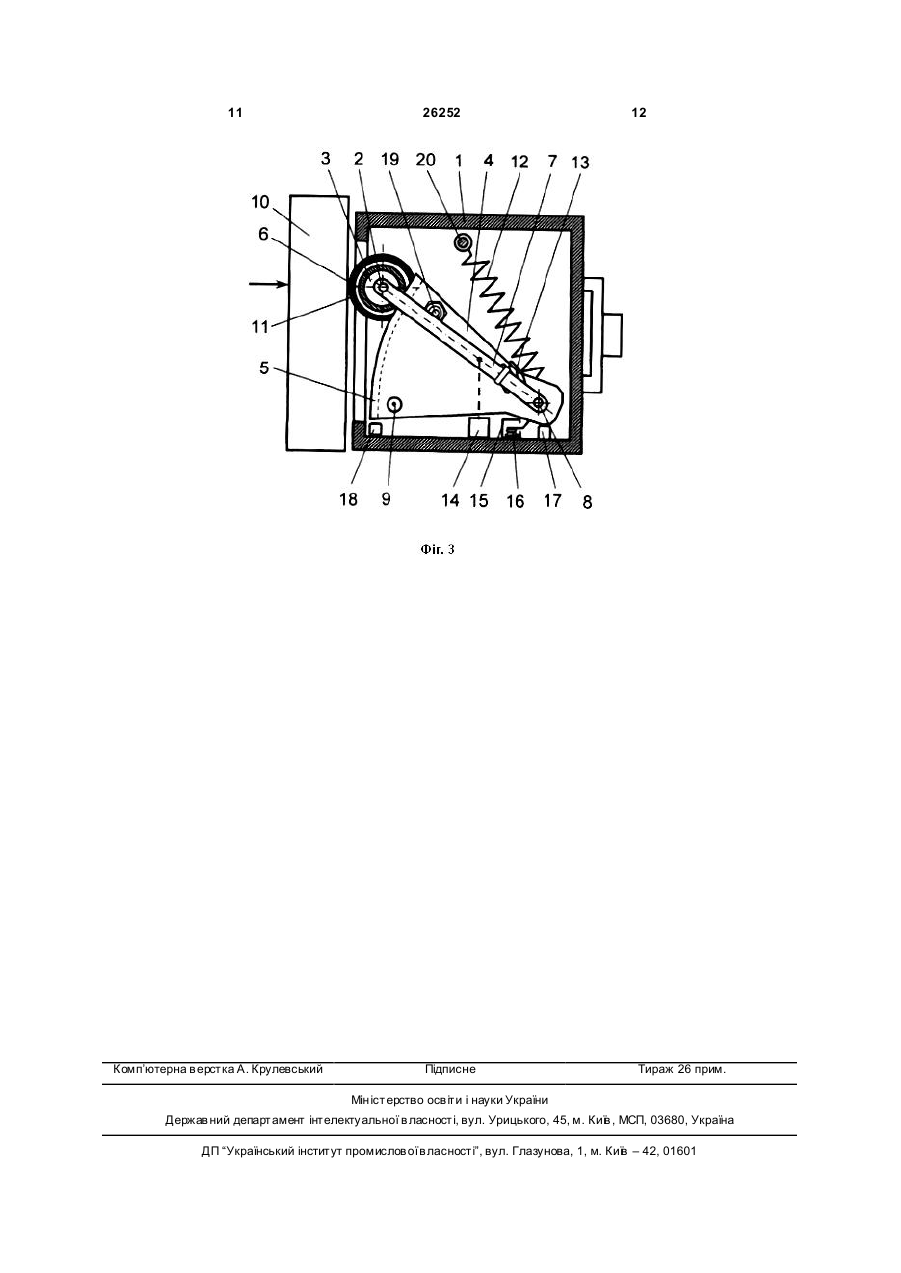
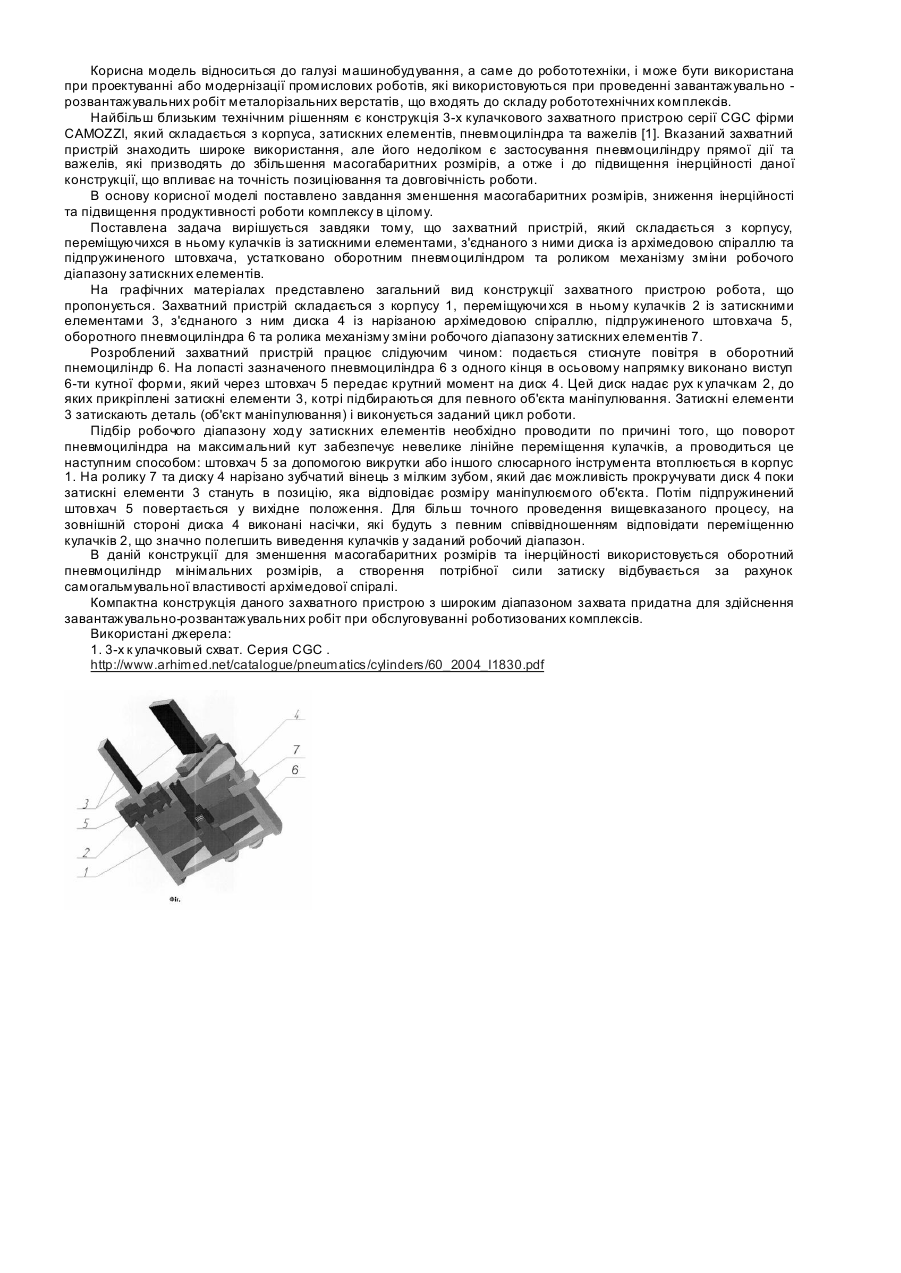
Адаптивний захватний пристрій інтелектуального робота, що містить кінематично зв'язані з приводом губки, принаймні на одній з яких встановлено перший і другий датчики стискального зусилля, зв'язані з блоком керування приводом губок, у губках з можливістю плоскопаралельного та обертового переміщення встановлені пружно зв'язані з відповідною губкою рухливі елементи, які мають можливість взаємодії з першим датчиком стискального зусилля і другим датчиком, рухливі елементи виконано у вигляді встановлених на осях роликів, контактні поверхні яких покрито пружним еластичним матеріалом, який відрізняється U 2 (19) 1 3 26252 ковзування деталі між пальцями адаптивного захва тного пристрою і тільки після цього робот може виконувати необхідні маніпуляційні операції з деталлю; - похибка у точності визначення необхідного стискального зусилля, що залежить від величини кроку дискретизації, тобто від заздалегідь встановленої величини збільшення стискального зусилля адаптивного захватного пристрою після кожного спробного руху. Найбільш близьким аналогом є адаптивний захватний пристрій інтелектуального робота [патент України на корисну модель №14569, B25J 15/00, 2006], що прийнятий як прототип. Захватний пристрій містить кінематично зв'язані з приводом губки, принаймні на одній з яких встановлено перший і другий датчики стискального зусилля, зв'язані з блоком керування приводом губок, інтерфейс якого містить п'ять входів і чотири ви ходи. У губках виконані напрямні пази, у яких з можливістю переміщення встановлені пружно зв'язані з відповідною губкою рухли ві елементи, які мають можливість взаємодії з першим датчиком зусилля і другим датчиком, з'єднаним із джерелом напруги. Напрямні пази кожної з губок розташовані під кутом до подовжньої осі адаптивного захватного пристрою інтелектуального робота, зверненим вершиною вниз. Блок керування приводом губок містить послідовно з'єднані блок затримки, перший суматор і другий формувач сигналу, послідовно з'єднані перший ключ, третій ключ, другий суматор, другий вхід якого через п'ятий ключ підключено до виходу першого ключа, третій формувач сигналу, вихід якого з'єднано з керуючим входом п'ятого ключа, і четвертий ключ, вихід якого підключено до третього виходу блоку керування, послідовно з'єднані другий ключ, сигнальний вхід якого з'єднано з другим входом блоку керування, шостий ключ, керуючий вхід якого підключено до виходу че твертого ключа, і третій суматор, др угий вхід якого з'єднано з першим входом блоку керування, а також послідовно з'єднані перший формувач сигналу, вхід якого з'єднано із третім входом блоку керування, а вихід - з керуючим входом першого ключа, і сьомий ключ, керуючий вхід якого підключено до виходу четвертого ключа, а вихід до першого виходу блоку керування. Четвертий вхід блоку керування з'єднано з інвертованим входом першого суматора, входом блоку затримки і другим ви ходом блоку керування, вихід другого формувача сигналу підключено до керуючих входів друго го, третього і четвертого ключів, сигнальний вхід сьомого ключа підключено до виходу першого формувача сигналу, керуючий вхід п'ятого ключа з'єднано з виходом третього формувача сигналу, при цьому вихід третього суматора підключено до четвертого виходу блоку керування. Рухливі елементи виконано у вигляді роликів, осі яких розміщені в напрямних пазах, виконаних у вигляді прорізів у стінках губок, контактні поверхні роликів покрито пружним еластичним матеріалом. Принаймні, в одному з напрямних пазів у верхній частині однієї з губок виконано поглиблення для фіксації у первинному стані осі рухливого елемента, що при цьому пружно зв'язана з другим датчи 4 ком стискального зусилля, підключеним до джерела напруги через восьмий ключ, і зашунтованим за допомогою дев'ятого ключа, керуючий вхід якого підключено до першого виходу блоку керування приводом губок, до першого входу якого через четвертий формувач сигналу підключено керуючий вхід восьмого ключа. Вихід джерела напруги і сигнальний вхід першого ключа підключено до п'ятого входу інтерфейсу блоку керування приводом. Такий адаптивний захватний пристрій інтелектуального робота має наступні проблеми: - складність конструкції та високі технологічні вимоги: а) через необхідність виконання напрямних пазів у вигляді прорізів в губках під строго відповідним кутом та з високими вимогами щодо їх симетричності по відношенню до подовжньої осі пристрою; б) через розташування в напрямних пазах губок одночасно рухливи х осей роликів та відповідних зворотних пружних елементів та через складність закріплення пружних елементів в напрямних пазах та на рухливи х осях роликів; в) через необхідність виконання в одному з напрямних пазів у верхній частині однієї з губок поглиблення для фіксації у первинному стані осі рухливого елемента; - обмеженість довговічності, зокрема терміну надійного функціонування адаптивного захватного пристрою, яка обумовлена: а) можливістю появи перекосів роликів (при стисканні деталі) через зміну і розбаланс жорсткосних характеристик зворотних пружних елементів в процесі їх експлуатації та через можливість несиметричного розташування деталі (при її захваті) по відношенню до подовжньої осі пристрою, а, відповідно, і по відношенню до кожної пари зворотних пружних елементів, з'єднаних з віссю відповідного ролика; б) можливістю (при довгому використанні пристрою) появи "люфтів" в кожній парі "напрямний паз - рухлива вісь ролика", зокрема, за рахунок пошкодження поверхонь напрямних пазів або зменшення діаметрів рухливи х осей (контактних елементів) роликів в контактних місцях, оскільки в процесі нормального функціонування буде мати місце постійний режим "тертя" між даними конструктивними елементами пристрою. В основу корисної моделі поставлено задачу удосконалення адаптивного захватного пристрою інтелектуального робота шляхом зміни конструкції напрямних елементів, контактних елементів роликів та в цілому вузлів забезпечення переміщення роликів (типу "напрямний паз - рухлива вісь ролика"), що призводить до спрощення конструкції адаптивного захватного пристрою інтелектуального робота та підвищення її надійності. Поставлена задача вирішується тим, що в запропонованому адаптивному захватному пристрої інтелектуального робота, що містить кінематично зв'язані з приводом губки, принаймні на одній з яких встановлено перший і другий датчики стискального зусилля, зв'язані з блоком керування приводом губок, у губках з можливістю плоскопаралельного та обертового переміщення встановлені пружно зв'язані з відповідною губкою рухливі елементи, які мають можливість взаємодії з пер 5 26252 шим датчиком стискального зусилля і другим датчиком, рухливі елементи виконано у вигляді встановлених на осях роликів, контактні поверхні яких покрито пружним еластичним матеріалом, згідно з корисною моделлю в кожну губку введено пару жорстко зв'язаних між собою секторних елементів з зубчастими напрямними рейками, на торцевих поверхнях роликів жорстко закріплені відповідні зубчасті шестерні з можливістю обертання при повороті роликів, зубчасті шестерні виконано з діаметром меншим діаметра роликів, вісь кожного ролика шарнірно закріплена на відповідних кінцях двох рухливи х планок, інші кінці яких шарнірно зв'язані з додатковою віссю, жорстко зв'язаною з відповідною парою секторних елементів, на зовнішніх дуга х яких виконано зубці для забезпечення зубчастого зчеплення відповідних зубчастих напрямних рейок кожної пари секторних елементів з зубчастими шестернями відповідного ролика, вісь обертання кожної пари секторних елементів закріплена на корпусі відповідної губки паралельно осям обертання роликів з можливістю поворота секторних елементів при контакті роликів з деталлю, кожна додаткова вісь пружно зв'язана за допомогою принаймні однієї зворотної пружини секторних елементів з відповідною губкою, а кожна рухлива планка - з відповідним секторним елементом за допомогою зворотної пружини рухливої планки, причому принаймні одна пара секторних елементів зв'язана з другим датчиком, а принаймні одна рухлива планка - з першим датчиком стискального зусилля. Винахідницький рівень забезпечується виконанням вузлів забезпечення переміщення роликів у вигляді спарених секторних елементів з напрямними зубчастими рейками, які утворюють зубчасті з'єднання з відповідними контактними зубчастими шестернями роликів, що дозволило якісно поліпшити процес "самозатиску" деталі, виключивши тертя кочення при зміні положення рухливи х елементів. При цьому усувається можливість перекосу р ухливих елементів при стисканні об'єкту (деталі). Те хнічний результат відноситься до всієї сукупності істотних ознак, оскільки використання запропонованих зубчасти х з'єднань для забезпечення переміщення рухливи х елементів при створенні необхідної величини стискального зусилля дозволило відмовитися від технологічних з'єднань типу "проріз - вісь" в порівнянні з прототипом, а також дозволило конструктивно удосконалити процес формування другим датчиком керувального сигналу при створенні захватним пристроєм мінімально необхідного стискального зусилля. Така сукупність нових ознак і складає винахідницький задум, що відрізняється новизною й істотними відмінностями. Запропонований адаптивний захва тний пристрій інтелектуального робота може бути широко застосований у промисловості, зокрема, для автоматизації складальних операцій, якщо необхідно попередньо розпізнавати складові частини об'єкта зборки, що відрізняються за масою, чи для автоматизації сортувальних операцій при обслуговуванні роботом конвеєра, деталі на який надходять випадковим чином. Адаптивний захватний пристрій дозволяє автоматизувати про 6 цеси з крихкими деталями і деталями, що легко піддаються деформації. При реєстрації зміни маси об'єкта маніпулювання в процесі виконання інтелектуальним роботом відповідної технологічної операції його система керування може здійснювати адаптивну самокорекцію параметрів алгоритму керування з урахуванням поточних значень маси об'єкта маніпулювання, що дозволить суттєво підвищити точність реалізації бажаної траєкторії руху захватного пристрою інтелектуального робота. На Фіг.1 наведено фасадну проекцію адаптивного захватного пристрою інтелектуального робота з деталлю, на Фіг.2 - відповідну проекцію адаптивного захватного пристрою для виду зверху, а на Фіг.3 - момент спрацьовування другого датчика при створенні захватним пристроєм мінімально необхідного стискального зусилля. Адаптивний захватний пристрій інтелектуального робота містить кінематично зв'язані з приводом губки 1, в кожній з яких (Фіг.1, 2) встановлено з можливістю плоско-паралельного та обертового переміщення рухливий елемент у вигляді розміщеного на осі 2 ролика 3. Крім того, в кожній губці 1 встановлено пару жорстко зв'язаних між собою (Фіг.2) секторних елементів 4 з зубчастими напрямними рейками 5. На торцевих поверхнях роликів 3 закріплені відповідні зубчасті шестерні 6 з можливістю обертання при повороті роликів 3. Зубчасті шестерні 6 виконано з діаметром меншим від діаметра роликів 3. Вісь 2 кожного ролика 3 шарнірно закріплена на відповідних кінцях двох р ухливих планок 7, інші кінці яких шарнірно зв'язані з додатковою віссю 8. Вісь 8 жорстко зв'язана з відповідною парою секторних елементів 4, на зовнішніх дуга х яких виконано зубці для забезпечення зубчастого зчеплення відповідних зубчастих напрямних рейок 5 кожної пари секторних елементів 4 з зубчастими шестернями 6 відповідного ролика 3. Вісь 9 обертання кожної пари секторних елементів 4 закріплена на корпусі відповідної губки 1 паралельно осям 2 обертання роликів 3 з можливістю поворота секторних елементів 4 при контакті роликів 3 з деталлю 10. Поверхню кожного ролика 3, що контактує з деталлю 10 (Фіг.1, 2), покрито пружним еластичним шорсткуватим матеріалом 11, наприклад гумою. Кожна додаткова вісь 8 пружно зв'язана за допомогою зворотних пружин 12 секторних елементів 4 з відповідною губкою 1. Кожна рухлива планка 7 пружно зв'язана з відповідним секторним елементом 4 за допомогою зворотної пружини 13 рухливої планки. Адаптивний захватний пристрій інтелектуального робота обладнано першим датчиком 14 стискального зусилля, що реєструє переміщення рухливого елемента 3 (при нарощуванні адаптивним захватним пристроєм стискального зусилля) шляхом реєстрації кутового переміщення а відповідної рухливої планки 7. Датчик 14 стискального зусилля може бути виконаний, наприклад, потенціометричним, ємнісним чи індуктивним. На корпусі відповідної губки 1 закріплено другий датчик 15 стискального зусилля. Кожна пара секторних елементів 4 зв'язана з відповідним другим датчиком 15 стискального зусилля, що може бути виконаний, наприклад, у вигляді кінцевого вимикача з контактною групою 16 (Фіг.1). 7 26252 Датчики стискального зусилля 14 та 15 зв'язані з блоком керування приводом губок (на Фіг.1-3 не показано). Кут поворота кожної пари секторних елементів 4 у відповідній губці 1 при створенні мінімально необхідного стискального зусилля (Фіг.3) обмежено відповідними упорами 17 та 18. Секторні елементи 4 відповідної губки 1 жорстко зв'язані між собою за допомогою штирьового елемента 19, а зворотні пружини 12 закріплені на відповідній губці 1 за допомогою додаткового штирьового елемента 20. Запропонований пристрій працює таким чином. Перед захоплюванням об'єкта 10 губки 1 захва тного пристрою розведені, а ролики 3 та секторні елементи 4 знаходяться у первинному стані. При цьому (Фіг.1) кожний секторний елемент 4 під дією відповідних зворотних пружин 12 секторних елементів утримується на відповідному упорі 18, кожна рухлива планка 4 утримується в крайньому верхньому положенні, впираючись в штирьовий елемент 19 під дією відповідної зворотної пружини 13 рухливої планки, а контактна група 16 другого датчика 15 стискального зусилля знаходиться в розімкненому стані. При захоплюванні об'єкта 10 блок керування приводом губок 1 подає командний сигнал на привід, який за допомогою відповідних кінематичних зв'язків забезпечує переміщення губок 1 назустріч одна одній (для захоплювання об'єкта 10). При контакті стискальних роликів з деталлю 10 і подальшій роботі приводу губки 1 продовжують наближатись одна до одної, відбувається деформація пружних поверхонь 11 роликів 3 та при взаємодії деталі 10 з роликами 3 здійснюється поворот секторних елементів 4 навколо осі 9 з одночасним нарощуванням стискального зусилля. Секторні елементи 4 повертаються до їх контакту з відповідними упорами 17 (Фіг.3), що досягається при створенні губками 1 захватного пристрою мінімального (заздалегідь заданого) значення стискального зусилля. При цьому спрацьовує кожний другий датчик 15 стискального зусилля, оскільки контактні групи 16 замикаються, що є командним сигналом для виконання інтелектуальним роботом спробного руху адаптивного захватного пристрою на підйом об'єкта 10 догори. Одночасно з підйомом догори захватного пристрою продовжується нарощування стискального зусилля губок 1 приводу. Коли сили тертя, що виникають між покриттями 11 стискальних роликів і деталлю 10, перевищують протидіючу силу зворотних пружних елементів 13 починається обертальний рух роликів 3 по поверхні деталі 10, а відповідно зубчасті шестерні 6 роликів 3 починають рухатись по напрямним рейкам 5 секторних елементів 4, забезпечуючи зміну кутового положення відповідних рухливи х планок 7. Це приводить до зміни сигналу на виході першого датчика 14 стискального зусилля, що є відповідним командним сигналом блоку керування приводом для відключення живлення від приводу губок 1. Таким чином, в момент спрацьовування першого датчика 14 стискального зусилля (при виникненні обертального руху роликів 3) припиняється стиснення губок 1, оскільки привід губок 1 відключається, а забезпечується лише рух адаптивного захватного при 8 строю догори (шляхом керування механічною рукою інтелектуального робота). Конструктивне виконання напрямних рейок 5 саме на секторних елементах 4 приводить до того, що в міру підйому адаптивного захватного пристрою інтелектуального робота стискальні ролики 3 за допомогою зубчастих з'єднань типу "напрямна рейка 5 секторного елемента - зубчаста шестерня 6 рухливого ролика" повертаються і одночасно зміщуються вниз (Фіг.1) щодо губок 1, нарощуючи при цьому стискальне зусилля. Рухли ві планки 7 також повертаються навколо своїх осей 8 при одночасному здійсненні роликами 3 обертального і плоскопаралельного руху. Цей процес відбувається до тих пір, поки стискальне зусилля стискальних роликів 3 не забезпечить утримання і надійний підйом деталі 10. Величина стискального зусилля при цьому формується в залежності від маси деталі 10. Ролики 3 з відповідними рухли вими планками 7 у зміщеному положенні показані на Фіг.1 (штриховою лінією). Переміщення зубчастих шестерень 6 роликів 3 по напрямним рейкам 5 секторних елементів 4 припиняється після здійснення "самозатиску" деталі 10, а на виході першого датчика 14 стискального зусилля формується значення сигналу, що відповідає величині створеного захватним пристроєм стискального зусилля або величині маси деталі 10. Постійне значення вихідного сигналу першого датчика 14 стискального зусилля є одночасно командним сигналом інтелектуальному роботу на припинення спробного руху захватного пристрою і свідчить про створення адаптивним захватним пристроєм інтелектуального робота необхідного значення стискального зусилля. В подальшому інтелектуальний робот здійснює заплановані маніпуляційні операції з деталлю 10. Якщо в процесі виконання маніпуляційних операцій з об'єктом 10 його маса збільшується (ємність, у яку доливається рідина чи додається сипучий матеріал), то адаптивний захватний пристрій, працюючи автоматично, без будь-яких зовнішніх команд забезпечує нарощування стискального зусилля до необхідної величини, а на виході першого датчика 14 при цьому формується сигнал, за допомогою якого можна оцінити масу об'єкта 10. Цей сигнал можна використовувати для ідентифікації (розпізнавання) об'єктів 10, які відрізняються за масою, що дуже важливо при виконанні інтелектуальним роботом складальних чи сортувальних операцій з попередньою ідентифікацією об'єктів. Після вивільнення об'єкта 10 з адаптивного захватного пристрою інтелектуального робота всі секторні елементи 4, рухливі планки 7 та ролики 3 під дією відповідних зворотних пружин 12, 13 переводяться до первинного стану. Позитивний ефект проявляється в тому, що в порівнянні з адаптивним захватним пристроєм інтелектуального робота за патентом України №14569 даний пристрій має більш просте конструктивне виконання, оскільки складний рух роликів в процесі "самозажиму" деталі забезпечується шляхом їх переміщення за допомогою високотехнологічних зубчастих з'єднань типу "напрямна рейка секторного елемента - зубчаста шестірня ролика" на відміну від з'єднань типу "проріз-вісь", що використову 9 ються у прототипі. Підвищення надійності за рахунок виключення перекосів роликів в процесі "самозажиму" деталі підвищує довговічність роботи 26252 10 адаптивного захватного пристрою інтелектуального робота в порівнянні з прототипом. 11 Комп’ютерна в ерстка А. Крулевський 26252 Підписне 12 Тираж 26 прим. Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститут промислов ої в ласності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюAdaptive gripping device of intellectual robot
Автори англійськоюKondratenko Yurii Panteliiovych, Kondratenko Volodymyr Yuriiovych, Markovskyi Ihor Volodymyrovych, Chernov Serhii Kostiantynovych, Shvets' Eduard Anatoliiovych, Shyshkin Oleksandr Serhiiovych
Назва патенту російськоюАдаптивное захватное устройство интеллектуального робота
Автори російськоюКондратенко Юрий Пантелеевич, Кондратенко Владимир Юрьевич, Марковский Игорь Владимирович, Чернов Сергей Константинович, Швец Эдуард Анатольевич, Шишкин Александр Сергеевич
МПК / Мітки
МПК: B25J 15/00
Мітки: захватний, інтелектуального, пристрій, робота, адаптивний
Код посилання
<a href="https://ua.patents.su/6-26252-adaptivnijj-zakhvatnijj-pristrijj-intelektualnogo-robota.html" target="_blank" rel="follow" title="База патентів України">Адаптивний захватний пристрій інтелектуального робота</a>
Адаптивний захватний пристрій інтелектуального робота

Номер патенту: 14569
Опубліковано: 15.05.2006
Автори: Кондратенко Юрій Пантелійович, Швець Едуард Анатолійович
МПК: B25J 15/00
Мітки: робота, адаптивний, захватний, інтелектуального, пристрій
Формула / Реферат:
Адаптивний захватний пристрій інтелектуального робота, що містить кінематично зв'язані з приводом губки, принаймні на одній з яких встановлено перший і другий датчики стискального зусилля, зв'язані з блоком керування приводом губок, інтерфейс якого містить чотири входи і чотири виходи, у губках виконані напрямні пази, у яких з можливістю переміщення встановлені пружно зв'язані з відповідною губкою рухливі елементи, які мають можливість...
Захватний пристрій промислового робота
Номер патенту: 24280
Опубліковано: 25.06.2007
Автори: Павленко Іван Іванович, Годунко Максим Олегович, Мажара Віталій Анатолійович
МПК: B23B 15/00, B23Q 7/04
Мітки: робота, захватний, промислового, пристрій
Формула / Реферат:
Захватний пристрій промислового робота, який складається з корпусу, кулачків із затискними елементами, що переміщуються в корпусі з'єднаного з ними диска із архімедовою спіраллю, та підпружиненого штовхача, який відрізняється тим, що його устатковано оборотним пневмоциліндром та роликом механізму зміни робочого діапазону затискних елементів.
Двозахватний пристрій промислового робота

Номер патенту: 15774
Опубліковано: 17.07.2006
Автори: Мажара Віталій Анатолійович, Павленко Іван Іванович
МПК: F16S 5/00
Мітки: двозахватний, промислового, пристрій, робота
Формула / Реферат:
1. Двозахватний пристрій промислового робота для одночасного затиску двох деталей, що складається з важелів з губками, вилки та тяги, які приєднані до кронштейна, обертового пневмоциліндра та пневмоциліндра розтиску, який відрізняється тим, що пневмоциліндр розтиску винесений за межі захватного пристрою.2. Двозахватний пристрій промислового робота за п. 1, який відрізняється тим, що розтиск захвату можливий лише в робочій...
Багатофункціональний кистьовий пристрій робота

Номер патенту: 18647
Опубліковано: 15.11.2006
Автори: Чернов Сергій Костянтинович, Кондратенко Володимир Юрійович, Швець Едуард Анатолійович, Кондратенко Юрій Пантелійович, Марковський Ігор Володимирович
МПК: B25J 15/00
Мітки: багатофункціональний, робота, пристрій, кистьовий
Формула / Реферат:
Багатофункціональний кистьовий пристрій робота, що містить дві пари захватних органів, основу, головний корпус, привід захватних органів, кінематично зв'язаний з гвинтовою парою, та зовнішній і внутрішній порожнинні циліндричні елементи, встановлені коаксіально гвинту гвинтової пари, кожний захватний елемент першої пари захватних органів за допомогою відповідної пари паралельних тяг кінематично зв'язано з гайкою гвинтової пари, а кожний...
Захватний пристрій

Номер патенту: 2845
Опубліковано: 26.12.1994
Автори: Черконос Оксана Анатоліївна, Комащенко Віталій Іванович, Федоренко Павло Йосипович, Великий Михайло Ізраілевич, Черконос Анатолій Іванович, Димченко Олег Васильович
МПК: B66C 1/22
Формула / Реферат:
1. Захватное устройство, содержащее трос, концы которого связаны с подвеской для крюка подъемной машины, изогнутые от вертикальной оси симметрии захватные органы, связанные с ними и закрепленные на горизонтальных осях с возможностью перемещения по тросу ролики, отличающееся тем, что, с целью повышения надежности захвата груза с углублениями на боковых поверхностях, связь роликов с захватными органами выполнена в виде планок, расположенных...
Попередній патент: Підшипниковий вузол ковзання з плаваючою втулкою
Наступний патент: Каркасно-тентова конструкція
Випадковий патент: Спосіб збирання конопель