Пристрій для керування інтелектуальним роботом
Номер патенту: 41121
Опубліковано: 12.05.2009
Автори: Кондратенко Галина Володимирівна, Кондратенко Володимир Юрійович, Аль Суод Махмуд мохаммад Салем, Кондратенко Юрій Пантелійович
Формула / Реферат
Пристрій для керування інтелектуальним роботом, що містить захватний орган, дві затискні губки, послідовно з'єднані датчик проковзування, перший підсилювач, диференціатор, перший пороговий елемент, вихід якого з'єднаний з S-входом першого RS-тригера, R-вхід якого призначений для сприйняття сигналу запуску і є входом пристрою, елемент І, перший і другий входи якого з'єднані з виходами тактильних датчиків, встановлених на затискних губках, відповідні приводи для стискання губок, підйому і горизонтального переміщення захватного органа, другий, третій та четвертий підсилювачі, підсилювач-інвертор, Т-тригер, вихід якого з'єднаний з входом другого підсилювача, елемент АБО, перший і другий входи якого з'єднані з виходами тактильних датчиків, а вихід - з рахунковим входом Т-тригера, другий RS-тригер, перший суматор, перший вхід якого з'єднаний з виходом другого підсилювача, а другий - з виходом підсилювача-інвертора, вихід елемента І з'єднано із входом обнуління Т-тригера, входом третього підсилювача, вихід якого підключено до входу приводу підйому захватного органа, і S-входом другого RS-тригера, вихід якого з'єднаний із входом підсилювача-інвертора, R-вхід другого RS-тригера з'єднаний з R-входом першого RS-тригера, вихід якого через четвертий підсилювач з'єднаний із входом приводу стискання губок, який відрізняється тим, що введено другий пороговий елемент, другий, третій, четвертий, п'ятий, шостий, сьомий і восьмий суматори, джерело опорної напруги, перший, другий, третій і четвертий керовані ключі, датчик положення затискних губок, вихід якого через перший масштабний блок підключений до другого інвертованого входу другого суматора, перший вхід якого з'єднаний з виходом джерела опорної напруги, першим входом третього суматора, другим інвертованим входом четвертого суматора і через четвертий керований ключ з другим входом восьмого суматора, датчик горизонтального переміщення захватного органа, вихід якого підключений до третього входу третього суматора, першого входу четвертого суматора та другого інвертованого входу сьомого суматора, а також перший і другий елементи пам'яті та блок визначення модуля, при цьому виходи тактильних датчиків відповідно з'єднані з керованими входами першого і другого керованих ключів, вихід першого суматора через третій керований ключ з'єднаний із входом приводу горизонтального переміщення захватного органа, керовані входи першого і другого елементів пам'яті та керований вхід датчика горизонтального переміщення підключені до входу пристрою, вихід другого суматора з'єднаний з третім входом четвертого суматора і другим інвертованим входом третього суматора, вихід якого через послідовно з'єднані перший керований ключ і перший елемент пам'яті підключений до перших входів п'ятого і шостого суматорів, вихід четвертого суматора через послідовноз'єднані другий керований ключ і другий елемент пам'яті підключений до другого інвертованого входу п'ятого суматора, вихід якого є виходом пристрою і через другий масштабний блок підключений до другого інвертованого входу шостого суматора, вихід якого з'єднаний з першим входом сьомого суматора, що своїм виходом підключений до першого входу восьмого суматора і керованого входу четвертого ключа, а вихід восьмого суматора через послідовно з'єднані блок визначення модуля і другий пороговий елемент підключений до керованого входу третього керованого ключа.
Текст
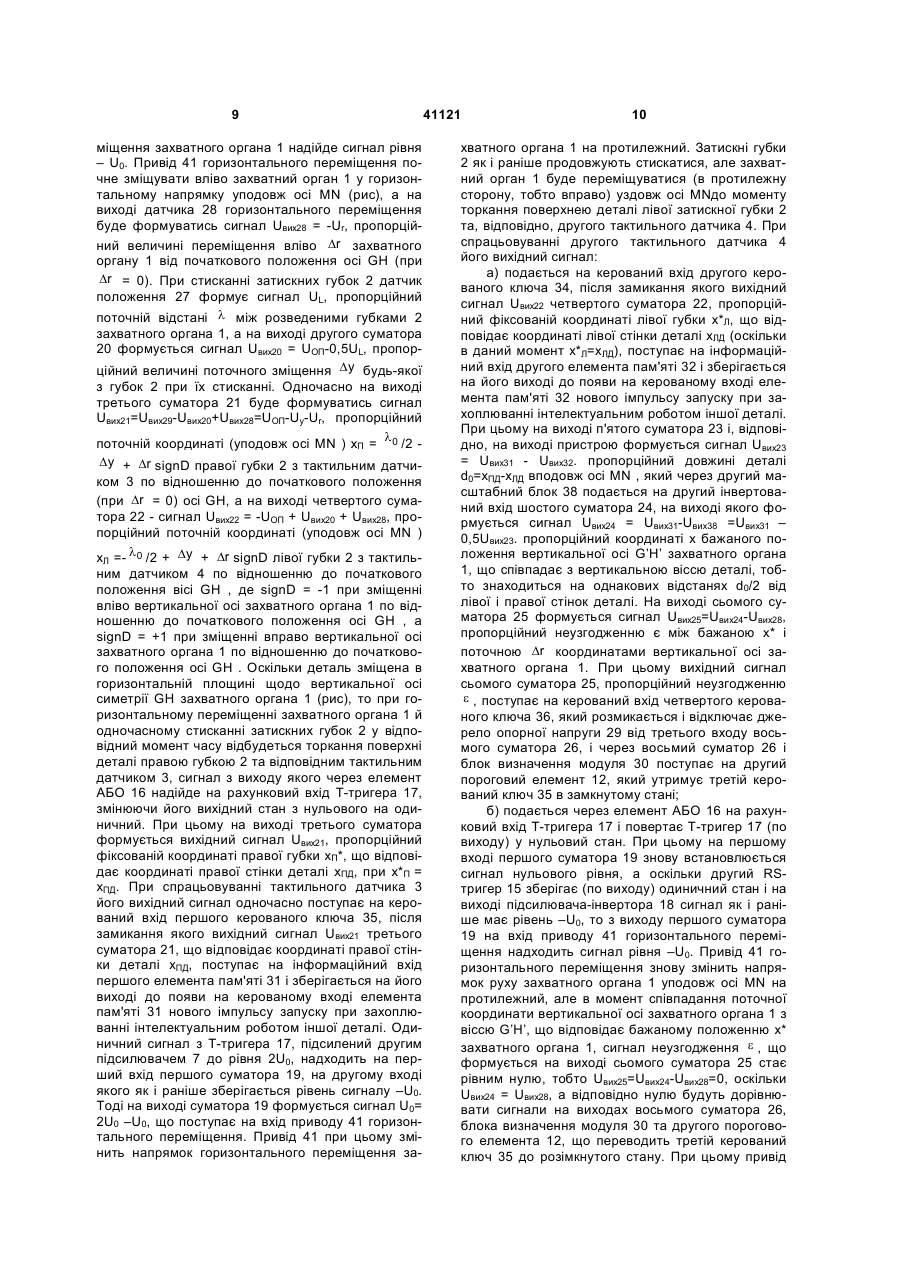
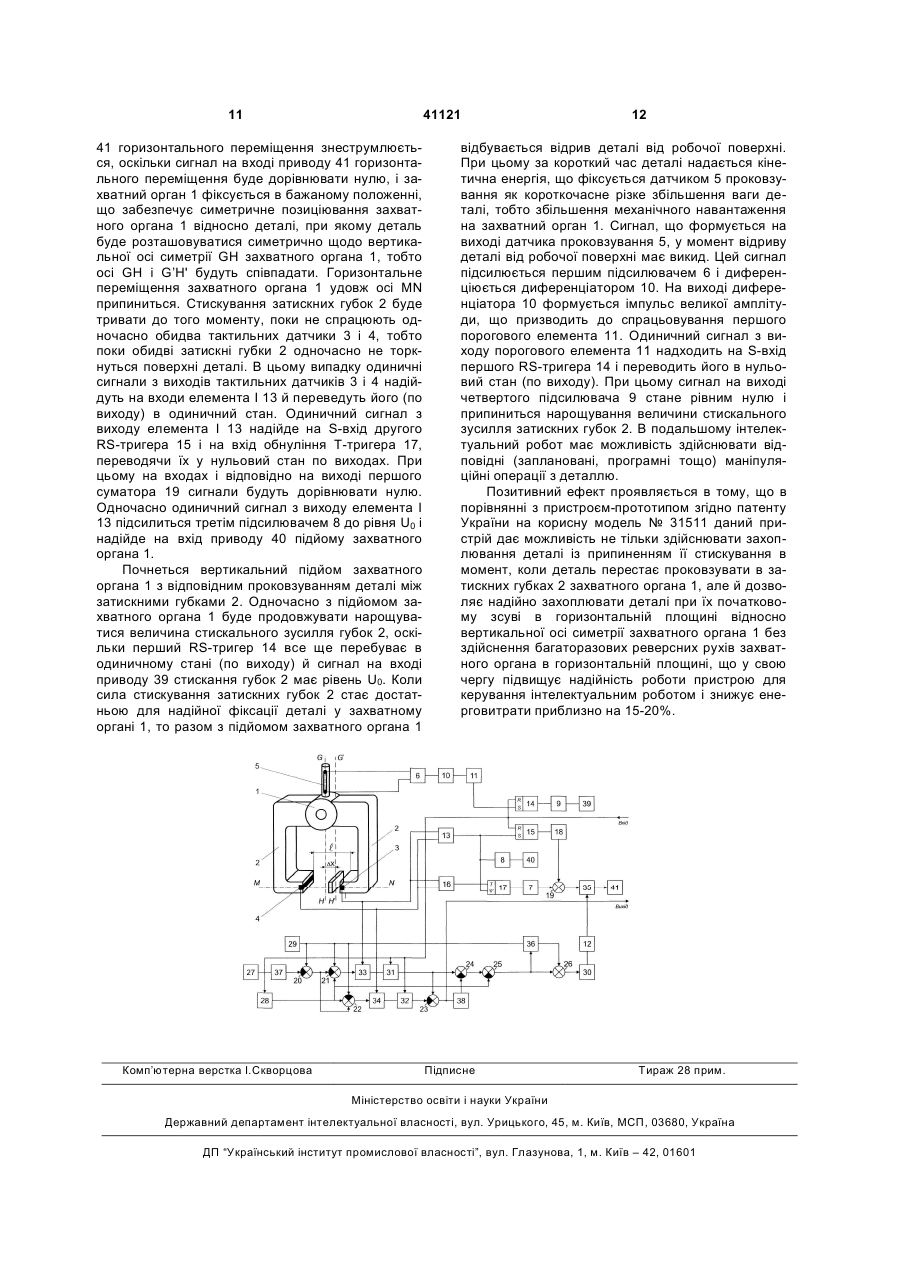
Пристрій для керування інтелектуальним роботом, що містить захватний орган, дві затискні губки, послідовно з'єднані датчик проковзування, перший підсилювач, диференціатор, перший пороговий елемент, вихід якого з'єднаний з S-входом першого RS-тригера, R-вхід якого призначений для сприйняття сигналу запуску і є входом пристрою, елемент І, перший і другий входи якого з'єднані з виходами тактильних датчиків, встановлених на затискних губках, відповідні приводи для стискання губок, підйому і горизонтального переміщення захватного органа, другий, третій та четвертий підсилювачі, підсилювач-інвертор, Ттригер, вихід якого з'єднаний з входом другого підсилювача, елемент АБО, перший і другий входи якого з'єднані з виходами тактильних датчиків, а вихід - з рахунковим входом Т-тригера, другий RSтригер, перший суматор, перший вхід якого з'єднаний з виходом другого підсилювача, а другий - з виходом підсилювача-інвертора, вихід елемента І з'єднано із входом обнуління Т-тригера, входом третього підсилювача, вихід якого підключено до входу приводу підйому захватного органа, і Sвходом другого RS-тригера, вихід якого з'єднаний із входом підсилювача-інвертора, R-вхід другого RS-тригера з'єднаний з R-входом першого RSтригера, вихід якого через четвертий підсилювач з'єднаний із входом приводу стискання губок, який відрізняється тим, що введено другий пороговий елемент, другий, третій, четвертий, п'ятий, шостий, сьомий і восьмий суматори, джерело опорної 2 (19) 1 3 Корисна модель належить до робототехніки й може бути використана в конструкціях інтелектуальних роботів з чутливими захватними органами, що адаптуються до габаритних розмірів та ваги деталей, які захоплюють. Відомо про пристрої для керування інтелектуальними роботами, що за допомогою тактильних датчиків та датчиків проковзування забезпечують в процесі захоплювання об'єкта маніпулювання (деталі) одночасний контакт затискних губок з деталлю та формування величини стискального зусилля губок відповідно до маси деталі. В цих пристроях реєструються сигнали тактильного контакту губок з деталлю та сигнали проковзування, що формуються при появі або зникненні проковзування деталей в захватних органах інтелектуального робота. Прикладом такого пристрою для керування інтелектуальним роботом є пристрій [Авт. свід. СРСР № 1188700, МКІ G 05В 19/00, опубл. Бюл. № 40, 1985], що містить захватний орган з губками, блок задавання програми, тактильні датчики, перший і другий приводи відповідно для стискання губок та підйому захватного органа, датчик проковзування, послідовно з'єднані підсилювач, диференціатор, пороговий елемент, RS-тригер, елемент ЗАПЕРЕЧЕННЯ й перший ключ, а також послідовно підключені елемент І й другий ключ, вихід якого з'єднаний із входом другого приводу, а другий вхід - з першим виходом блоку задавання програми, підключеним другим виходом до другого входу RS-тригера, а третім виходом -до другого входу першого ключа, вихід якого з'єднаний із входом першого приводу стискання губок, вихід датчика проковзування з'єднаний із входом підсилювача, а виходи тактильних датчиків з'єднані з першим і другим входами елемента І. Такий датчик має наступні проблеми: - пристрій дозволяє здійснювати захоплювання деталей, розташованих тільки симетрично відносно губок захватного органа, що пов'язано з необхідністю попереднього центрування деталі відносно губок захватного органу перед її підйомом; - низька надійність пристрою, оскільки будьякий зсув деталі в горизонтальній площині відносно вертикальної осі симетрії захватного органа в процесі її захоплювання приведе, в першу чергу, до контакту деталі тільки з однією з губок й при подальшому стискуванні губок може викликати перекидання чи деформацію деталі або пошкодження захватного органа. Найбільш близьким до запропонованого є пристрій для керування інтелектуальним роботом [Патент України на корисну модель № 31511, МПК B25J 19/02, G05B 19/00, опубл. Бюл. № 7, 2008], що прийнятий як прототип. Пристрій для керування інтелектуальним роботом (прототип) містить захватний орган, дві затискні губки, послідовно з'єднані датчик проковзування, перший підсилювач, диференціатор, пороговий елемент, вихід якого з'єднаний з S-входом першого RS-тригера, R-вхід якого призначений для сприйняття імпульсу запуску, елемент І, перший і другий входи якого 41121 4 з'єднані з виходами тактильних датчиків, встановлених на затискних губках, і приводи стискання губок та підйому захватного органа. Крім того, пристрій містить елемент АБО, Т-тригер, другий RS-тригер, другий, третій та четвертий підсилювачі, підсилювач-інвертор, суматор і привід горизонтального переміщення захватного органа. Перший і другий входи елемента АБО з'єднані з виходами тактильних датчиків, а вихід - з рахунковим входом Т-тригера, вихід якого з'єднаний з входом другого підсилювача, вихід якого підключений до першого входу суматора, вихід якого підключено до входу привода горизонтального переміщення. Вихід елемента І з'єднано із входом обнуління Ттригера, з входом третього підсилювача, вихід якого підключено до входу приводу підйому захватного органа, і з S-входом другого RS-тригера, вихід якого з'єднаний із входом підсилювачаінвертора, вихід якого підключений до другого входу суматора, а R-вхід другого RS-тригера з'єднаний з R-входом першого RS-тригера, вихід якого з'єднаний із входом четвертого підсилювача, вихід якого з'єднаний із входом приводу стискання губок. Такий пристрій має наступні проблеми: - при захоплюванні деталей, розташованих несиметрично відносно губок захватного органа, пристрій забезпечує самоцентрування губок захватного органа відносно деталі перед її підйомом тільки при здійсненні багаторазових реверсних рухів захватного органа в горизонтальній площині (8-10 багаторазових рухів вліво-вправо в залежності від конструктивних особливостей розташування тактильних датчиків на затискних губках), що пов'язано з підвищеними енерговитратами інтелектуального робота; - необхідність здійснення багаторазових реверсних рухів захватного органу в горизонтальній площині знижує надійність пристрою через підвищену кількість спрацьовувань тактильних датчиків та підвищену можливість появи "люфтів" в механічних передачах маніпуляційної системи робота. В основу корисної моделі поставлено задачу удосконалення пристрою для керування інтелектуальним роботом шляхом введення додаткових датчиків плоско-паралельного переміщення губок та переміщення захватного органа в горизонтальній площині, а також електронних блоків обробки сигналів датчиків переміщення і тактильних датчиків, що дозволить розширити функціональні можливості пристрою за рахунок забезпечення надійного захоплювання деталей, зміщених відносно вертикальної осі симетрії захватного органа, при обмеженій кількості його реверсних рухів в горизонтальній площині. Крім того, пристрій забезпечує можливість розпізнавання інтелектуальним роботом деталей, що відрізняються за масою і габаритними розмірами. Поставлена задача вирішується тим, що до складу пристрою для керування інтелектуальним роботом, що містить захватний орган, дві затискні губки, послідовно з'єднані датчик проковзування, перший підсилювач, диференціатор, перший пороговий елемент, вихід якого з'єднаний з S-входом 5 першого RS-тригера, R-вхід якого призначений для сприйняття сигналу запуску і є входом пристрою, елемент І, перший і другий входи якого з'єднані з виходами тактильних датчиків, встановлених на затискних губках, відповідні приводи для стискання губок, підйому і горизонтального переміщення захватного органу, другий, третій та четвертий підсилювачі, підсилювач-інвертор, Ттригер, вихід якого з'єднаний з входом другого підсилювача, елемент АБО, перший і другий входи якого з'єднані з виходами тактильних датчиків, а вихід - з рахунковим входом Т-тригера, другий RSтригер, перший суматор, перший вхід якого з'єднаний з виходом другого підсилювача, а другий - з виходом підсилювача-інвертора, вихід елемента І з'єднано із входом обнуління Т-тригера, входом третього підсилювача, вихід якого підключено до входу приводу підйому захватного органа, і Sвходом другого RS-тригера, вихід якого з'єднаний із входом підсилювача-інвертора, R-вхід другого RS-тригера з'єднаний з R-входом першого RSтригера, вихід якого через четвертий підсилювач з'єднаний із входом приводу стискання губок, згідно корисної моделі додатково введено другий пороговий елемент, другий, третій, четвертий, п'ятий, шостий, сьомий і восьмий суматори, джерело опорної напруги, перший, другий, третій і четвертий керовані ключі, датчик положення затискних губок, вихід якого через перший масштабний блок підключений до другого інвертованого входу другого суматора, перший вхід якого з'єднаний з виходом джерела опорної напруги, першим входом третього суматора, другим інвертованим входом четвертого суматора і через п'ятий керований ключ з другим входом восьмого суматора, датчик горизонтального переміщення захватного органа, вихід якого підключений до третього входу третього суматора, першого входу четвертого суматора та другого інвертованого входу сьомого суматора, а також перший і другий елементи пам'яті та блок визначення модуля, при цьому виходи тактильних датчиків відповідно з'єднані з керованими входами першого і другого керованих ключів, вихід першого суматора через третій керований ключ з'єднаний із входом приводу горизонтального переміщення захватного органа, керовані входи першого і другого елементів пам'яті та керований вхід датчика горизонтального переміщення підключені до входу пристрою, вихід другого суматора з'єднаний з третім входом четвертого суматора і другим інвертованим входом третього суматора, вихід якого через послідовно з'єднані перший керований ключ і перший елемент пам'яті підключений до перших входів п'ятого і шостого суматорів, вихід четвертого суматора через послідовно з'єднані другий керований ключ і другий елемент пам'яті підключений до другого інвертованого входу п'ятого суматора, вихід якого є виходом пристрою і через другий масштабний блок підключений до другого інвертованого входу шостого суматора, вихід якого з'єднаний з першим входом сьомого суматора, що своїм виходом підключений до першого входу восьмого суматора і керованого входу четвертого ключа, а вихід восьмого суматора через послідовно з'єднані блок визначення модуля і другий поро 41121 6 говий елемент підключений до керованого входу третього керованого ключа. Винахідницький задум полягає в тому, що схемотехнічна особливість побудови пристрою для керування інтелектуальним роботом дозволяє забезпечувати процес самоцентрування захватного органа відносно деталі з невідомою масою при обмеженій кількості його реверсних рухів в горизонтальній площині з точним визначенням положення вертикальної осі симетрії деталі після однократного спрацьовування кожного з тактильних датчиків, що суттєво знижує енерговитрати і підвищує надійність процесу захоплювання деталі. Тобто в процесі захоплювання деталей, які зміщені в горизонтальній площині відносно вертикальної осі захватного органу, пристрій забезпечуватиме можливість розпізнавання інтелектуальним роботом деталей, що відрізняються за масою і габаритними розмірами, та одночасне формування координат вертикальної осі симетрії деталі і остаточного (результуючого) положення захватного органа, куди він буде разово переміщуватись і залишатись в даному стані до моменту одночасної появи сигналів контакту з деталлю на виходах обох тактильних датчиків. На фігурі наведена функціональна схема пристрою для керування інтелектуальним роботом. Пристрій містить захватний орган 1, дві затискні губки 2, тактильний датчик 3 правої губки 2, тактильний датчик 4 лівої губки 2, датчик 5 проковзування, перший 6, другий 7, третій 8 і четвертий 9 підсилювачі, диференціатор 10, перший 11 і другий 12 порогові елементи, елемент І 13, перший 14 і другий 15 RS-тригери, елемент АБО 16, Т-тригер 17, підсилювач-інвертор 18, перший 19, другий 20, третій 21, четвертий 22, п'ятий 23, шостий 24, сьомий 25 і восьмий 26 суматори, датчик положення 27 губок 2 захватного органа, датчик 28 горизонтального переміщення захватного органа 1, джерело опорної напруги 29, блок визначення модуля 30, перший 31 і другий 32 елементи пам'яті, перший 33, другий 34, третій 35 і четвертий 36 керовані ключі, перший 37 і другий 38 масштабні блоки, приводи 39, 40 й 41 відповідно для стискання губок 2, підйому та горизонтального переміщення захватного органа 1. Датчик 5 проковзування підключений до першого підсилювача 6, що послідовно з'єднаний з диференціатором 10 та першим пороговим елементом 11, вихід якого з'єднаний з S-входом першого RS-тригера 14. Виходи тактильних датчиків 3, 4 відповідно з'єднані з першим і другим входами елемента І 13, з керованими входами першого 33 і другого 34 керованих ключів та з першим і другим входами елемента АБО 16, вихід якого підключений до рахункового входу Ттригера 17. Вихід Т-тригера 17 з'єднаний із входом другого підсилювача 7, вихід якого підключений до першого входу першого суматора 19. Вихід першого суматора 19 через третій керований ключ 35 з'єднаний із входом приводу 41 горизонтального переміщення захватного органа 1. Вихід елемента І 13 з'єднаний з входом обнуління Т-тригера 17, Sвходом другого RS-тригера 15 та входом третього підсилювача 8, вихід якого підключений до входу приводу 40 підйому захватного органа 1. Вихід 7 другого RS-тригера 15 через підсилювач-інвертор 18 підключений до другого входу першого суматора 19. R-входи першого RS-тригера 14 і другого RS-тригера 15, керовані входи першого 31 і другого 32 елементів пам'яті та керований вхіддатчика 28 горизонтального переміщення підключені через вхід пристрою до генератора імпульсу запуску (генератор на фігурі не показано). Вихід першого RS-тригера 14 через четвертий підсилювач 9 з'єднаний з входом приводу 39 стискання губок 2. Коефіцієнт підсилення другого підсилювача 7 встановлюється у два рази більшим за значення коефіцієнта підсилення підсилювача-інвертора 18, а значення масштабних коефіцієнтів в масштабних блоках 37 і 38 встановлюється на рівні 0,5. Датчик положення 27, який формує сигнал поточної відстані між плоско-паралельними губками 2 захватного органа 1, через перший масштабний блок 37 підключений до другого інвертованого входу другого суматора 20, перший вхід якого з'єднаний з виходом джерела опорної напруги 29, першим входом третього суматора 21, другим інвертованим входом четвертого суматора 22 і через четвертий керований ключ 36 з другим входом восьмого суматора 26. Датчик 28 горизонтального переміщення захватного органа 1 підключений до третього входу третього суматора 21, першого входу четвертого суматора 22 та другого інвертованого входу сьомого суматора 25. Вихід другого суматора 20 з'єднаний з третім входом четвертого суматора 22 і другим інвертованим входом третього суматора 21, вихід якого через послідовно з'єднані перший 33 керований ключ і перший 31 елемент пам'яті підключений до перших входів п'ятого 23 і шостого 24 суматорів. Вихід четвертого суматора 22 через послідовно з'єднані другий 34 керований ключ і другий 32 елемент пам'яті підключений до другого інвертованого входу п'ятого 23 суматора. Вихід п'ятого 23 суматора, що є одночасно виходом пристрою, через другий масштабний блок 38 підключений до другого інвертованого входу шостого 24 суматора, вихід якого з'єднаний з першим входом сьомого суматора 25, що своїм виходом підключений до першого входу восьмого 26 суматора і керованого входу четвертого ключа 36. Вихід восьмого 26 суматора через послідовно з'єднані блок визначення модуля 30 і другий пороговий елемент 12 підключений до керованого входу третього керованого ключа 35. Запропонований пристрій працює наступним чином. У первинному стані інтелектуальний робот підводить захватний орган 1 до деталі, яку в подальшому необхідно захопити з величиною стискального зусилля губок 2, що відповідає апріорно невідомій масі деталі. Деталь перебуває, наприклад, на робочій поверхні стола, стрічки конвеєра тощо й (у загальному випадку) має лінійний зсув Dx горизонтальній площині (фігура) щодо вертикальної осі симетрії GH захватного органа 1. Тобто деталь розташована несиметрично відносно затискних губок 2 захватного органа 1, оскільки відстані від вертикальної осі деталі G’H’ до робочих поверхонь лівої і правої затискних губок 2 є різними. Затискні губки 2 захватного органа 1 знаходяться при цьому в розведеному стані, а на виході датчи 41121 8 ка положення 27 губок 2 захватного органа сформовано відповідний сигнал U0L , пропорційний максимальній відстані l0 між розведеними губками 2 захватного органа 1. Сигнали на виходах тактильних датчиків 3, 4 та на виході датчика 5 проковзування відсутні, на виходах елементів І 13 й АБО 16 встановлено нульовий сигнал "0". Т-тригер 17, перший 14 та другий 15 RS-тригери перебувають у нульовому стані, тобто на їх виходах встановлено нульові сигнали "0", відсутні також сигнали на входах приводів 39, 40, 41, відповідно, для стискання губок 2, підйому та горизонтального переміщення захватного органа 1. Перший 33 і другий 34 керовані ключі знаходяться в первинному розімкнутому стані, а четвертий 36 керований ключ - в замкнутому стані. На виході джерела опорної напруги 29 утримується постійне значення сигналу UОП, пропорційного максимальній відстані l0 /2 від будьякої з симетрично розташованих затискних губок до вертикальної осі симетрії GH захватного органа 1, тобто UОП = 0,5U0L = const. Вихідний сигнал джерела опорної напруги 29 через послідовно з'єднані замкнутий четвертий керований ключ 36, восьмий суматор 26, блок визначення модуля 30 та другий пороговий елемент 12 з рівнем вихідного сигналу U0, статична характеристика якого має вигляд ìU , при Uвх12 > 0 Uвих12 = í 0 , î 0, при Uвх12 = 0 поступає на керований вхід третього керованого ключа 35, утримуючи його в замкнутому стані. Сигнал Uвих2О на виході другого суматора 20, пропорційний величині зміщення будь-якої з губок 2 при їх стисканні, дорівнює нулю, оскільки на його перший вхід подається сигнал UОП з виходу джерела опорної напруги 29, а на другий інвертований вхід сигнал 0,5U0L з виходу першого масштабного блока 37, на вхід якого подається сигнал U0L з виходу датчика положення 27 губок 2, тобто Uвих20 = UОП 0,5U0L =0 . Пристрій здійснює керування процесом автоматичного захоплювання деталі інтелектуальним роботом при появі на вході пристрою імпульсу запуску, який одночасно з'являється на керованих входах датчика 28 горизонтального переміщення захватного органа 1 та елементів пам'яті 31 і 32, що призводить до встановлення на їх виходах нульового сигналу "0", та на R-входах першого 14 і другого 15 RS-тригерів, що переводить вихідні сигнали першого 14 і другого 15 RS-тригерів в одиничний стан. Одиничний сигнал з виходу першого RS-тригера 14 підсилюється четвертим підсилювачем 9 до рівня U0 надходить на привід 39 стискання губок 2. Привід 39 починає стискати затискні губки 2 захватного органу 1. Одночасно одиничний сигнал з виходу другого RS-тригера 15 інвертується й підсилюється підсилювачемінвертором 18 до рівня –U0 і надходить на другий вхід першого суматора 19. На першому вході суматора 19 при цьому буде нульовий сигнал, оскільки Т-тригер 17 на даний момент (по виходу) поки ще перебуває в нульовому стані. Тоді з виходу суматора 19 через замкнутий третій керований ключ 35 на вхід приводу 41 горизонтального пере 9 41121 міщення захватного органа 1 надійде сигнал рівня – U0. Привід 41 горизонтального переміщення почне зміщувати вліво захватний орган 1 у горизонтальному напрямку уподовж осі MN (рис), а на виході датчика 28 горизонтального переміщення буде формуватись сигнал Uвих28 = -Ur, пропорційний величині переміщення вліво Dr захватного органу 1 від початкового положення осі GH (при Dr = 0). При стисканні затискних губок 2 датчик положення 27 формує сигнал UL, пропорційний поточній відстані l між розведеними губками 2 захватного органа 1, а на виході другого суматора 20 формується сигнал Uвих20 = UОП-0,5UL, пропорційний величині поточного зміщення Dy будь-якої з губок 2 при їх стисканні. Одночасно на виході третього суматора 21 буде формуватись сигнал Uвих21=Uвих29-Uвих20+Uвих28=UОП-Uy-Ur, пропорційний поточній координаті (уподовж осі MN ) х = l0 /2 П Dy + Dr signD правої губки 2 з тактильним датчиком 3 по відношенню до початкового положення (при Dr = 0) осі GH, а на виході четвертого суматора 22 - сигнал Uвих22 = -UОП + Uвих20 + Uвих28, пропорційний поточній координаті (уподовж осі MN ) х =- l0 /2 + Dy + Dr signD лівої губки 2 з тактильЛ ним датчиком 4 по відношенню до початкового положення вісі GH , де signD = -1 при зміщенні вліво вертикальної осі захватного органа 1 по відношенню до початкового положення осі GH , a signD = +1 при зміщенні вправо вертикальної осі захватного органа 1 по відношенню до початкового положення осі GH . Оскільки деталь зміщена в горизонтальній площині щодо вертикальної осі симетрії GH захватного органа 1 (рис), то при горизонтальному переміщенні захватного органа 1 й одночасному стисканні затискних губок 2 у відповідний момент часу відбудеться торкання поверхні деталі правою губкою 2 та відповідним тактильним датчиком 3, сигнал з виходу якого через елемент АБО 16 надійде на рахунковий вхід Т-тригера 17, змінюючи його вихідний стан з нульового на одиничний. При цьому на виході третього суматора формується вихідний сигнал Uвих21, пропорційний фіксованій координаті правої губки хП*, що відповідає координаті правої стінки деталі хПД, при х*П = хПД. При спрацьовуванні тактильного датчика 3 його вихідний сигнал одночасно поступає на керований вхід першого керованого ключа 35, після замикання якого вихідний сигнал Uвих21 третього суматора 21, що відповідає координаті правої стінки деталі хПД, поступає на інформаційний вхід першого елемента пам'яті 31 і зберігається на його виході до появи на керованому вході елемента пам'яті 31 нового імпульсу запуску при захоплюванні інтелектуальним роботом іншої деталі. Одиничний сигнал з Т-тригера 17, підсилений другим підсилювачем 7 до рівня 2U0, надходить на перший вхід першого суматора 19, на другому вході якого як і раніше зберігається рівень сигналу –U0. Тоді на виході суматора 19 формується сигнал U0= 2U0 –U0, що поступає на вхід приводу 41 горизонтального переміщення. Привід 41 при цьому змінить напрямок горизонтального переміщення за 10 хватного органа 1 на протилежний. Затискні губки 2 як і раніше продовжують стискатися, але захватний орган 1 буде переміщуватися (в протилежну сторону, тобто вправо) уздовж осі MNдо моменту торкання поверхнею деталі лівої затискної губки 2 та, відповідно, другого тактильного датчика 4. При спрацьовуванні другого тактильного датчика 4 його вихідний сигнал: а) подається на керований вхід другого керованого ключа 34, після замикання якого вихідний сигнал Uвих22 четвертого суматора 22, пропорційний фіксованій координаті лівої губки х*Л, що відповідає координаті лівої стінки деталі хЛД (оскільки в даний момент х*Л=хЛД), поступає на інформаційний вхід другого елемента пам'яті 32 і зберігається на його виході до появи на керованому вході елемента пам'яті 32 нового імпульсу запуску при захоплюванні інтелектуальним роботом іншої деталі. При цьому на виході п'ятого суматора 23 і, відповідно, на виході пристрою формується сигнал Uвих23 = Uвих31 - Uвих32. пропорційний довжині деталі d0=xПД-xЛД вподовж осі MN , який через другий масштабний блок 38 подається на другий інвертований вхід шостого суматора 24, на виході якого формується сигнал Uвих24 = Uвих31-Uвих38 =Uвих31 – 0,5Uвих23. пропорційний координаті х бажаного положення вертикальної осі G’H’ захватного органа 1, що співпадає з вертикальною віссю деталі, тобто знаходиться на однакових відстанях d0/2 від лівої і правої стінок деталі. На виході сьомого суматора 25 формується сигнал Uвих25=Uвих24-Uвих28, пропорційний неузгодженню є між бажаною х* і поточною Dr координатами вертикальної осі захватного органа 1. При цьому вихідний сигнал сьомого суматора 25, пропорційний неузгодженню e , поступає на керований вхід четвертого керованого ключа 36, який розмикається і відключає джерело опорної напруги 29 від третього входу восьмого суматора 26, і через восьмий суматор 26 і блок визначення модуля 30 поступає на другий пороговий елемент 12, який утримує третій керований ключ 35 в замкнутому стані; б) подається через елемент АБО 16 на рахунковий вхід Т-тригера 17 і повертає Т-тригер 17 (по виходу) у нульовий стан. При цьому на першому вході першого суматора 19 знову встановлюється сигнал нульового рівня, а оскільки другий RSтригер 15 зберігає (по виходу) одиничний стан і на виході підсилювача-інвертора 18 сигнал як і раніше має рівень –U0, то з виходу першого суматора 19 на вхід приводу 41 горизонтального переміщення надходить сигнал рівня –U0. Привід 41 горизонтального переміщення знову змінить напрямок руху захватного органа 1 уподовж осі MN на протилежний, але в момент співпадання поточної координати вертикальної осі захватного органа 1 з віссю G’H’, що відповідає бажаному положенню х* захватного органа 1, сигнал неузгодження e , що формується на виході сьомого суматора 25 стає рівним нулю, тобто Uвих25=Uвих24-Uвих28=0, оскільки Uвих24 = Uвих28, а відповідно нулю будуть дорівнювати сигнали на виходах восьмого суматора 26, блока визначення модуля 30 та другого порогового елемента 12, що переводить третій керований ключ 35 до розімкнутого стану. При цьому привід 11 41121 41 горизонтального переміщення знеструмлюється, оскільки сигнал на вході приводу 41 горизонтального переміщення буде дорівнювати нулю, і захватний орган 1 фіксується в бажаному положенні, що забезпечує симетричне позиціювання захватного органа 1 відносно деталі, при якому деталь буде розташовуватися симетрично щодо вертикальної осі симетрії GH захватного органа 1, тобто осі GH i G’H' будуть співпадати. Горизонтальне переміщення захватного органа 1 удовж осі MN припиниться. Стискування затискних губок 2 буде тривати до того моменту, поки не спрацюють одночасно обидва тактильних датчики 3 і 4, тобто поки обидві затискні губки 2 одночасно не торкнуться поверхні деталі. В цьому випадку одиничні сигнали з виходів тактильних датчиків 3 і 4 надійдуть на входи елемента І 13 й переведуть його (по виходу) в одиничний стан. Одиничний сигнал з виходу елемента І 13 надійде на S-вхід другого RS-тригера 15 і на вхід обнуління Т-тригера 17, переводячи їх у нульовий стан по виходах. При цьому на входах і відповідно на виході першого суматора 19 сигнали будуть дорівнювати нулю. Одночасно одиничний сигнал з виходу елемента І 13 підсилиться третім підсилювачем 8 до рівня U0 і надійде на вхід приводу 40 підйому захватного органа 1. Почнеться вертикальний підйом захватного органа 1 з відповідним проковзуванням деталі між затискними губками 2. Одночасно з підйомом захватного органа 1 буде продовжувати нарощуватися величина стискального зусилля губок 2, оскільки перший RS-тригер 14 все ще перебуває в одиничному стані (по виходу) й сигнал на вході приводу 39 стискання губок 2 має рівень U0. Коли сила стискування затискних губок 2 стає достатньою для надійної фіксації деталі у захватному органі 1, то разом з підйомом захватного органа 1 Комп’ютерна верстка І.Скворцова 12 відбувається відрив деталі від робочої поверхні. При цьому за короткий час деталі надається кінетична енергія, що фіксується датчиком 5 проковзування як короткочасне різке збільшення ваги деталі, тобто збільшення механічного навантаження на захватний орган 1. Сигнал, що формується на виході датчика проковзування 5, у момент відриву деталі від робочої поверхні має викид. Цей сигнал підсилюється першим підсилювачем 6 і диференціюється диференціатором 10. На виході диференціатора 10 формується імпульс великої амплітуди, що призводить до спрацьовування першого порогового елемента 11. Одиничний сигнал з виходу порогового елемента 11 надходить на S-вхід першого RS-тригера 14 і переводить його в нульовий стан (по виходу). При цьому сигнал на виході четвертого підсилювача 9 стане рівним нулю і припиниться нарощування величини стискального зусилля затискних губок 2. В подальшому інтелектуальний робот має можливість здійснювати відповідні (заплановані, програмні тощо) маніпуляційні операції з деталлю. Позитивний ефект проявляється в тому, що в порівнянні з пристроєм-прототипом згідно патенту України на корисну модель № 31511 даний пристрій дає можливість не тільки здійснювати захоплювання деталі із припиненням її стискування в момент, коли деталь перестає проковзувати в затискних губках 2 захватного органа 1, але й дозволяє надійно захоплювати деталі при їх початковому зсуві в горизонтальній площині відносно вертикальної осі симетрії захватного органа 1 без здійснення багаторазових реверсних рухів захватного органа в горизонтальній площині, що у свою чергу підвищує надійність роботи пристрою для керування інтелектуальним роботом і знижує енерговитрати приблизно на 15-20%. Підписне Тираж 28 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for control of intelligent robot
Автори англійськоюKondratenko Yurii Panteliiovych, Kondratenko Volodymyr Yuriiovych, Al Suod Makhmud Mokhammad Salem, Kondratenko Halyna Volodymyrivna
Назва патенту російськоюУстройство для управления интеллектуальным роботом
Автори російськоюКондратенко Юрий Пантелеевич, Кондратенко Владимир Юрьевич, Аль Суод Махмуд Мохаммад Салем, Кондратенко Галина Владимировна
МПК / Мітки
МПК: G05B 19/00, B25J 19/02
Мітки: керування, роботом, пристрій, інтелектуальним
Код посилання
<a href="https://ua.patents.su/6-41121-pristrijj-dlya-keruvannya-intelektualnim-robotom.html" target="_blank" rel="follow" title="База патентів України">Пристрій для керування інтелектуальним роботом</a>
Пристрій для керування адаптивним роботом
Номер патенту: 31511
Опубліковано: 10.04.2008
Автори: Кондратенко Галина Володимирівна, Кондратенко Володимир Юрійович, Чернов Сергій Констянтинович, Марковський Ігор Володимирович, Кондратенко Юрій Пантелійович
МПК: G05B 19/00, B25J 19/02
Мітки: керування, роботом, адаптивним, пристрій
Формула / Реферат:
Пристрій для керування адаптивним роботом, що містить захватний орган, дві затискні губки, послідовно з'єднані датчик проковзування, перший підсилювач, диференціатор, пороговий елемент, вихід якого з'єднаний з S-входом першого RS-тригера, R-вхід якого призначений для сприйняття імпульсу запуску, елемент І, перший і другий входи якого з'єднані з виходами тактильних датчиків, встановлених на затискних губках, і приводи стискання губок та...
Пристрій керування запуском насосного агрегату
Номер патенту: 39795
Опубліковано: 10.03.2009
Автори: Грабко Володимир Віталійович, Мошноріз Микола Миколайович
МПК: G07C 3/00
Мітки: насосного, агрегату, запуском, керування, пристрій
Формула / Реферат:
Пристрій керування запуском насосного агрегату, що містить сенсор температури навколишнього середовища, перший, другий, третій і четвертий логічні елементи І, перший та другий генератори імпульсів, перший, другий та третій цифрові компаратори, перший регістр, суматор, блок задання допустимої кількості пусків, перший, другий і третій логічні елементи АБО, блок задання витримки часу при пуску з холодного стану, перший логічний елемент АБО-НІ,...
Конвеєрний пристрій
Номер патенту: 28540
Опубліковано: 10.12.2007
Автори: Онищенко Віктор Константинович, Мартинюк Тетяна Борисівна, Кожем'яко Володимир Прокопович, Чечельницький Олег Іванович, Мороз Ірина Віталіївна
МПК: G06F 7/50
Мітки: конвеєрний, пристрій
Формула / Реферат:
Конвеєрний пристрій, який містить n входів і n комірок, крім того, і-та комірка містить блок порівняння, суматор, мініматор, три регістри, D-тригер, мультиплексор і блок логічних елементів І, причому перший вхід і-ої комірки з'єднаний з першим входом мультиплексора, вихід якого підключений до входу першого регістра, вихід якого з'єднаний з першим входом блока порівняння та першим входом мініматора, вихід якого з'єднаний з третім регістром, а...
Конвеєрний підсумовуючий пристрій

Номер патенту: 7269
Опубліковано: 15.06.2005
Автори: Мартинюк Тетяна Борисівна, Балашов Костянтин Анатолійович, Мороз Ірина Віталіївна, Расенко Роман Анатолійович
МПК: G06F 7/503
Мітки: конвеєрний, підсумовуючий, пристрій
Формула / Реферат:
Конвеєрний підсумовуючий пристрій, який містить n входів та n комірок, крім того, і-та комірка містить блок порівняння, суматор, вузол виділення загальної частини операндів, три регістри, D-тригер, мультиплексор і блок логічних елементів І, причому перший вхід і-ої комірки з’єднаний з першим входом мультиплексора, вихід якого підключений до входу першого регістра, вихід якого з'єднаний з першим входом блока порівняння та першим входом вузла...
Конвеєрний пристрій
Номер патенту: 6513
Опубліковано: 16.05.2005
Автори: Хом'юк Віктор Вікторович, Мартинюк Тетяна Борисівна, Кожем'яко Андрій Вікторович
МПК: G06F 7/503
Мітки: конвеєрний, пристрій
Формула / Реферат:
Конвеєрний пристрій, який містить n входів та n комірок, крім того, і-та комірка містить блок порівняння, суматор, вузол виділення загальної частини операндів, три регістри, D-тригер, мультиплексор і блок логічних елементів І, причому перший вхід і-ої комірки з’єднаний з першим входом мультиплексора, вихід якого підключений до входу першого регістра, вихід якого з'єднаний з першим входом блока порівняння та першим входом вузла виділення...
Попередній патент: Спосіб ідентифікації величини стискального зусилля інтелектуального робота
Наступний патент: Спосіб проектування захисного взуття для собак
Випадковий патент: Спосіб визначення дії токсинів ентеробактерій на секреторну активність клітин крові