Захватний пристрій
Номер патенту: 71142
Опубліковано: 10.07.2012
Автори: Перегудов Сергій Володимирович, Аралкіна Ксенія Анатоліївна, Дехтяренко Ірина Олександрівна, Аралкін Анатолій Сергійович
Формула / Реферат
Захватний пристрій, що містить корпус, встановлені на ньому захватні важелі з затискними елементами, виконаними у вигляді одноплечого важеля, і еластичними камерами, розташованими між ними, привод, виконаний у вигляді ведучого центрального черв'яка і двох діаметрально протилежно розташованих щодо нього черв'ячних коліс, які кінематично зв'язані з захватними важелями, який відрізняється тим, що привод захватного пристрою додатково оснащений двома веденими черв'яками, кожен з яких розташований діаметрально протилежно і паралельно ведучому центральному черв'яку, при цьому кожен ведений черв'як зв'язаний з ведучим черв'яком за допомогою зубчастої передачі, котра їх зв'язує, що виконана у вигляді пари циліндричних зубчастих коліс, що складається з шестерні і веденого зубчастого колеса, а вал кожного веденого зубчастого колеса зв'язаний з кожним веденим черв'яком через муфту, яка виконана з можливістю зустрічного осьового повороту веденого черв'яка і веденого зубчастого колеса в протилежних напрямках і фіксації їх у заданому положенні.
Текст
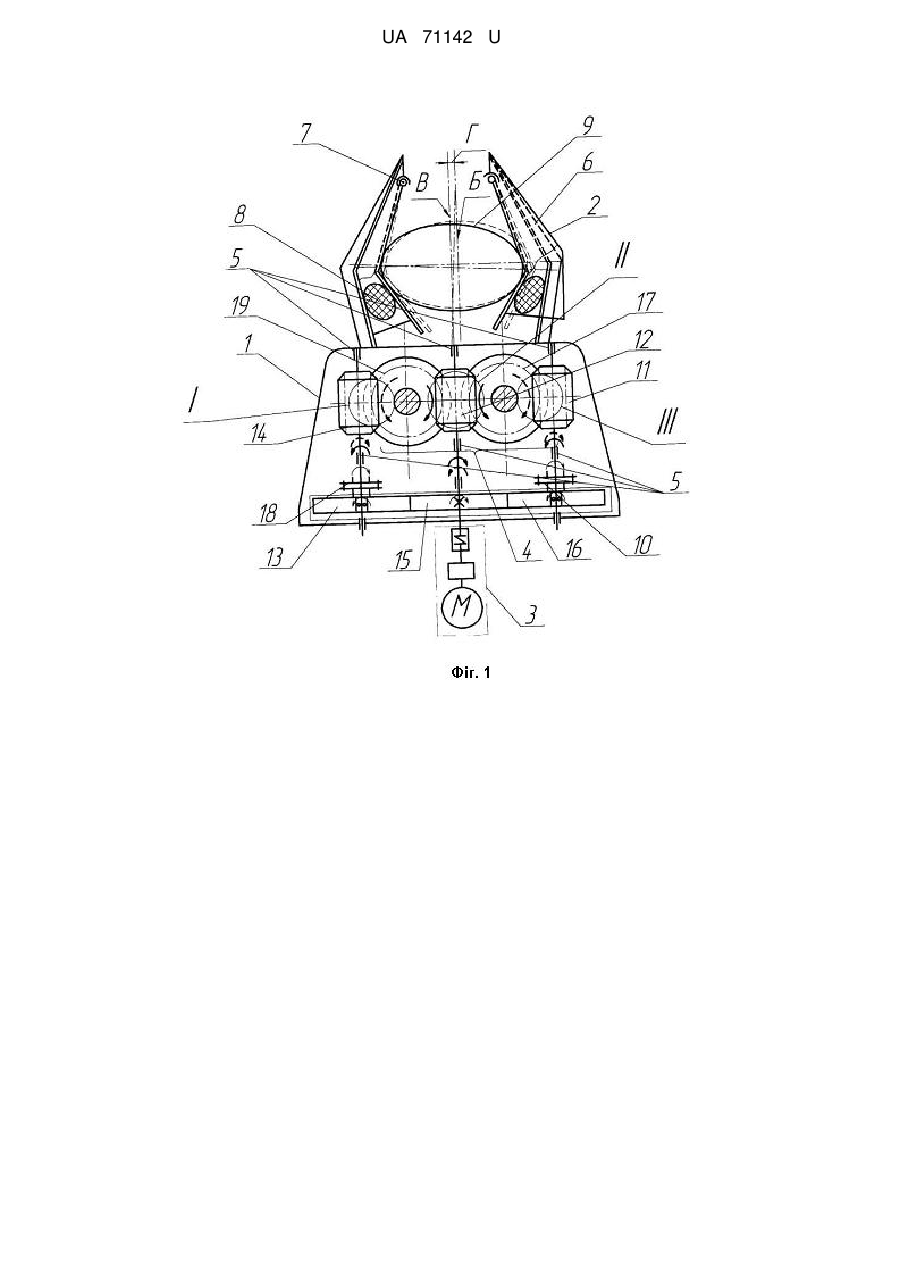
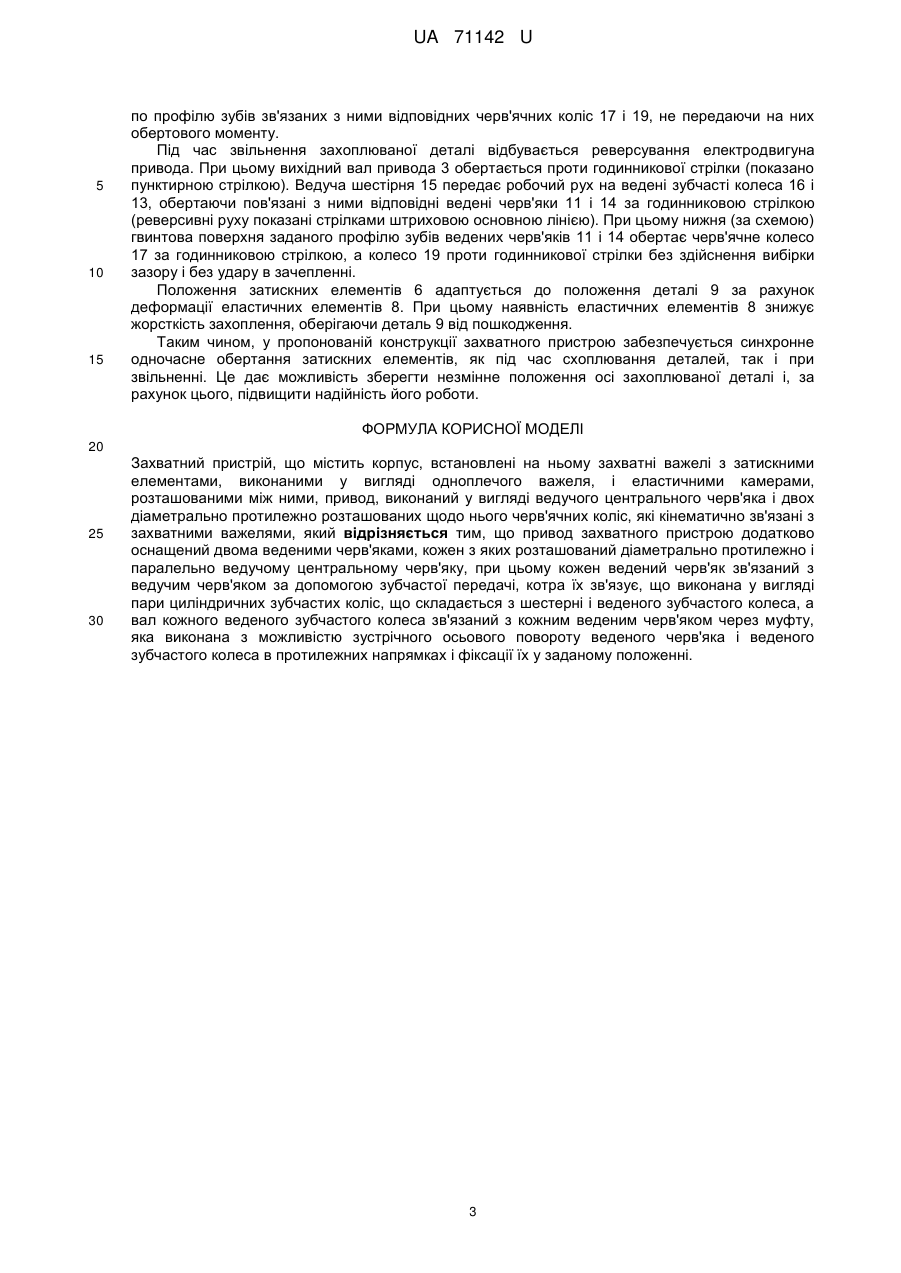
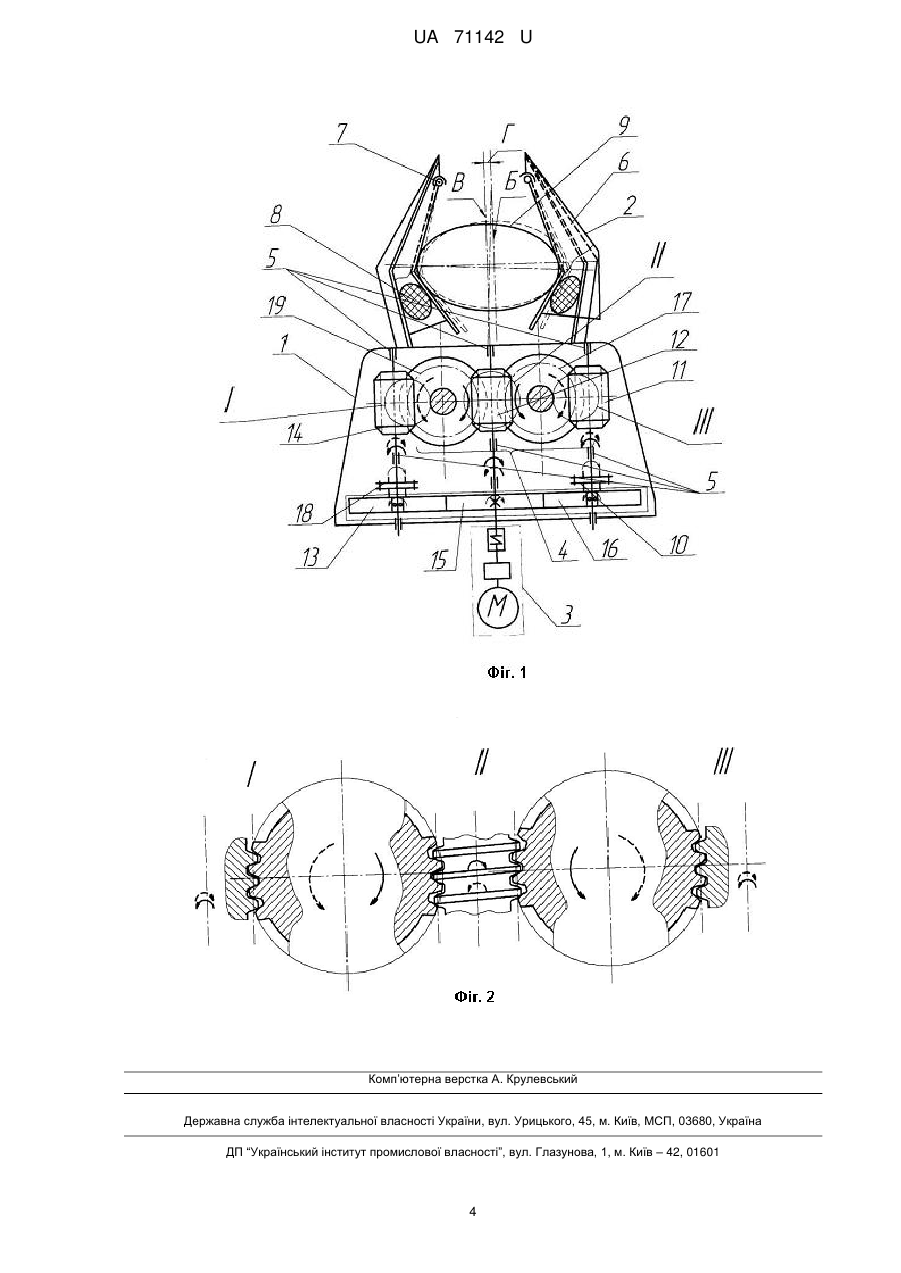
Реферат: Захватний пристрій, в якому привод захватного пристрою додатково оснащений двома веденими черв'яками, кожен з яких розташований діаметрально протилежно і паралельно ведучому центральному черв'яку, при цьому кожен ведений черв'як зв'язаний з ведучим черв'яком за допомогою зубчастої передачі, котра їх зв'язує, що виконана у вигляді пари циліндричних зубчастих коліс, що складається з шестерні і веденого зубчастого колеса, а вал кожного веденого зубчастого колеса зв'язаний з кожним веденим черв'яком через муфту, яка виконана з можливістю зустрічного осьового повороту веденого черв'яка і веденого зубчастого колеса в протилежних напрямках і фіксації їх у заданому положенні. UA 71142 U (54) ЗАХВАТНИЙ ПРИСТРІЙ UA 71142 U UA 71142 U 5 10 15 20 25 30 35 40 45 50 Корисна модель належить до захватних пристроїв і може бути використана в конструкціях автоматичних маніпуляторів та промислових роботів для автоматизації виробничих процесів. Відомий захват маніпулятора, що містить корпус, привод переміщення і повороту захвату, основні затискні і додаткові губки, кінематично зв'язані з приводами (Схват маніпулятора: Деклараційний патент на корисну модель 20041109478 Україна, 7 B25J 15/00 / Крапчов Ю.А., Савченко Ю.М. - №7281; Заявл. 19.11.2004; Опубл. 15.06.2005, Бюл. № 6). Основні та додаткові затискні губки захвата виконані пружними і з'єднані між собою в нижній частині. Привод переміщення захвата з'єднаний з черв'яком, який знаходиться в зачепленні з двома черв'ячними секторами. Осі секторів зв'язані окремо з поворотними кронштейнами, жорстко з'єднаними з відповідними основними і додатковими губками. Кронштейни виконані з можливістю взаємодії з корпусом. При цьому корпус зв'язаний з приводом обертання захвата. На валу привода встановлена шестірня, яка перебуває в зачепленні з зубчастим колесом, насадженим на стакан, який жорстко розташований в корпусі. Кожна з додаткових затискних губок оснащена у верхній частині підпружиненим захватом, який виконаний з можливістю самовстановлення щодо неї та об'єкта захоплення за допомогою шарнірного з'єднання. Додаткові затискні губки мають меншу твердість, ніж твердість основних затискних губок. Приводи переміщення і обертання захвата і елементи кінематичного ланцюга розміщені в герметичному корпусі. При значному відхиленні конфігурації поверхні захоплюваної деталі від правильної геометричної форми величина деформації пружин пружних захватів недостатня для компенсації цього відхилення. Тому при роботі відомого захватного пристрою неможливо забезпечити повну адаптацію положення затискних губок до положення осі захоплюваної деталі. Крім того, під час затиску деталі відомим пристроєм внаслідок похибки кроку зубів черв'яка і черв'ячних секторів неможливо забезпечити синхронний рух кожної з затискних губок. При цьому після здійснення захоплення деталі відомим пристроєм, внаслідок зазору в зачепленні між зубами відповідного черв'ячного сектора і черв'яка одна з губок захоплення не буде зафіксована. Фіксація цієї губки буде компенсована пружиною захвата. При цьому вісь захоплюваної деталі буде провертатися. Це призводить до зниження надійності роботи захвата. Під час звільнення захоплюваної деталі черв'як захватного пристрою реверсується. Спочатку починається рух затискної губки, черв'ячний сектор якої сполучається з черв'яком без зазору. Одночасно відбувається вибірка зазору в зачепленні черв'яка і черв'ячного сектора з зазором. При цьому захоплювана деталь буде провертатися, що також призводить до зниження надійності роботи відомого захвата. Найбільш близьким до заявленого технічного рішення є з захватний пристрій, що містить корпус, встановлені на ньому захватні важелі з затискними елементами, виконаними у вигляді одноплечого важеля, і еластичними камерами, розташованими між ними (Захватное устройство: Патент России №2042503 Новочеркасский политехнический институт им. С. Орджоникидзе, B25J 19/00/ Загороднюк В.Т.; Селиверстов В.А.; Булгаков А.Г.; Гарбузенко А.Н.. - 4812229/08; Заявл. 09.04.1990; Опубл. 27.08.1995). Пристрій містить привод, виконаний у вигляді ведучого центрального черв'яка і двох діаметрально протилежно розташованих відносно нього черв'ячних коліс, які кінематично зв'язані з захватними важелями. Еластичні елементи захватного пристрою виконані у вигляді камер, які заповнені стисненим повітрям або газом. Порожнини камер зв'язані між собою за допомогою трубопроводу і клапана. Один кінець затискного елемента шарнірно встановлений на захватному важелі, а інший зв'язаний з робочою поверхнею відповідної еластичної камери. При цьому трубопровід з'єднаний з вимірником тиску і витратоміром робочого середовища. Під час схоплювання деталі неправильної форми або під час порушення положення її осі, одна з камер буде деформуватися, витісняючи повітря в іншу еластичну камеру. При цьому кривизна оболонки цієї камери буде зменшуватися. Тиск всередині більш здеформованої камери буде додатково збільшуватися внаслідок збільшення кривизни оболонки камери (Яворский Б.М., Детлаф А. А. Справочник по физике. - Μ.: Наука, 1977. - 944 с): p 55 2 r , де: р - тиск у середині камери; - коефіцієнт поверхневого натягу матеріалу оболонки; r - радіус кривизни оболонки камери. Тому, перетікання повітря з однієї камери в іншу триватиме до моменту повного витіснення повітря з більш деформованої камери, яка має менший радіус кривизни. При цьому буде відбуватися порушення орієнтації захоплюваної деталі в просторі, що знижує надійність роботи захвата. Фіксація захоплюваної деталі в потрібному положенні за рахунок використання 1 UA 71142 U 5 10 15 20 25 30 35 40 45 50 55 60 клапана, вимірювача тиску і витратоміра відомого захвата вимагає застосування спеціальних засобів автоматики і тому складна, а також не забезпечує надійності його роботи. Крім того, внаслідок похибки кроку зубів черв'яка і черв'ячних коліс під час затиску деталі відомим пристроєм також неможливо забезпечити синхронний рух кожного захватного важеля відомого пристрою, що додатково приводить до зниження надійності його роботи. Задачею корисної моделі є удосконалення конструкції захватного пристрою за рахунок диференційної вибірки зазорів в черв'ячній передачі привода захватних важелів шляхом його оснащення двома додатковими веденими черв'яками, кожен з яких розташований діаметрально протилежно і паралельно ведучому центральному черв'яку. При цьому кожен ведений черв'як зв'язаний з ведучим черв'яком за допомогою зубчастої передачі, що дозволяє забезпечити надійну фіксацію захоплюваної деталі й за рахунок цього підвищити надійність роботи захвата. Поставлена задача вирішується за рахунок того, що захватний пристрій, містить корпус, встановлені на ньому захватні важелі з затискними елементами, виконаними у вигляді одноплечого важеля, і еластичними камерами, розташованими між ними, привод, виконаний у вигляді ведучого центрального черв'яка і двох діаметрально протилежно розташованих щодо нього черв'ячних коліс, які кінематично зв'язані з захватними важелями. Згідно з корисною моделлю, привод захватного пристрою додатково оснащений двома веденими черв'яками, кожен з яких розташований діаметрально протилежно і паралельно ведучому центральному черв'яку, при цьому кожен ведений черв'як зв'язаний з ведучим черв'яком за допомогою зубчастої передачі, котра їх зв'язує, що виконана у вигляді пари циліндричних зубчастих коліс, що складається з шестерні і веденого зубчастого колеса, а вал кожного веденого зубчастого колеса зв'язаний з кожним веденим черв'яком через муфту, яка виконана з можливістю зустрічного осьового повороту веденого черв'яка і веденого зубчастого колеса в протилежних напрямках і фіксації їх у заданому положенні. Суть корисної моделі пояснюється схемами, де на фіг. 1 представлено запропонований захватний пристрій, загальний вигляд; на фіг. 2 - види І, II та III на фіг. 1. Захватний пристрій містить корпус 1, захватні важелі 2, кінематично зв'язані з валом привода 3, і черв'ячну передачу 4, встановлену в корпусі 1 на підшипниках 5. Захватні важелі 2 містять затискні елементи 6, виконані у вигляді одноплечих важелів, закріплених на кінцях захватних важелів 2 за допомогою шарнірів 7. Затискні елементи 6 спираються на губки, які виконані у вигляді еластичних (гумових) елементів 8. Деталь 9 підлягає захопленню і переносу в позицію завантаження. При цьому вісь симетрії Б деталі 9 зміщена щодо поздовжньої осі захвата В на величину зміщення Г. Запропонований захватний пристрій працює таким чином. Перед початком роботи захватного пристрою виконують вибірку зазорів в черв'ячній передачі привода захватних важелів. Для цього муфти 10 і 18 розкріплюють, послаблюючи їх пальці. Ведені зубчасті колеса 13, 16 та пов'язані з ними півмуфти 10, 18 повертають проти годинникової стрілки, а ведені черв'яки 11 і 14 повертають за годинниковою стрілкою (фіг. 1, конфігураційні рухи показані тонкими стрілками). За рахунок цього нижній профіль зубів веденого черв'яка 11 провернеться і зміститься вниз (за схемою) впритул до верхнього профілю зубів черв'ячного колеса 17, здійснивши вибірку в зачепленні зубів зверху черв'ячного колеса 12 (фіг. 2). Одночасно з цим, нижній профіль зубів веденого черв'яка 14 провернеться і зміститься вниз впритул до верхнього (за схемою) профілю зубів черв'ячного колеса 19, здійснивши вибірку зазору в зачепленні з черв'ячним колесом 19. При цьому ведуча шестірня 15 і зв'язаний з нею ведучий черв'як 12 повернуться за годинниковою стрілкою. Нижній профіль зубів черв'яка 12 провернеться і зміститься в осьовому напрямку вниз впритул до верхнього профілю зубів черв'ячних коліс 17 і 19, здійснивши вибірку зазору в зачепленні з ними (фіг. 1). Після цього муфти 10 і 18 фіксують затягуванням їх пальців (болтів). У вихідному положенні захватні важелі 2 розведені, і захватний пристрій насувається на деталь 9. При цьому поздовжня вісь В захватного пристрою зміщена щодо осі Б деталі 9 на деяку величину зміщення Г. Еластичні елементи 8 знаходяться у вільному стані і мають однакову форму. Під час включення привода й обертання вихідного вала привода 3 за годинниковою стрілкою відбувається схоплювання деталі, (фіг. 1, робочі рухи під час процесу схоплювання показані стрілками контурними лініями) При цьому нижня (за схемою) гвинтова поверхня заданого профілю зубів ведучого черв'яка 12 обертає черв'ячне колесо 17 проти годинникової стрілки, а черв'ячне колесо 19 - за годинниковою стрілкою без здійснення вибірки зазору і без удару в зачепленні з зубцями черв'ячного колеса. Одночасно з цим, ведені черв'яки 11 і 14 будуть обертатися проти годинникової стрілки, а гвинтовий профіль їх зубів буде просто ковзати 2 UA 71142 U 5 10 15 по профілю зубів зв'язаних з ними відповідних черв'ячних коліс 17 і 19, не передаючи на них обертового моменту. Під час звільнення захоплюваної деталі відбувається реверсування електродвигуна привода. При цьому вихідний вал привода 3 обертається проти годинникової стрілки (показано пунктирною стрілкою). Ведуча шестірня 15 передає робочий рух на ведені зубчасті колеса 16 і 13, обертаючи пов'язані з ними відповідні ведені черв'яки 11 і 14 за годинниковою стрілкою (реверсивні руху показані стрілками штриховою основною лінією). При цьому нижня (за схемою) гвинтова поверхня заданого профілю зубів ведених черв'яків 11 і 14 обертає черв'ячне колесо 17 за годинниковою стрілкою, а колесо 19 проти годинникової стрілки без здійснення вибірки зазору і без удару в зачепленні. Положення затискних елементів 6 адаптується до положення деталі 9 за рахунок деформації еластичних елементів 8. При цьому наявність еластичних елементів 8 знижує жорсткість захоплення, оберігаючи деталь 9 від пошкодження. Таким чином, у пропонованій конструкції захватного пристрою забезпечується синхронне одночасне обертання затискних елементів, як під час схоплювання деталей, так і при звільненні. Це дає можливість зберегти незмінне положення осі захоплюваної деталі і, за рахунок цього, підвищити надійність його роботи. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 20 25 30 Захватний пристрій, що містить корпус, встановлені на ньому захватні важелі з затискними елементами, виконаними у вигляді одноплечого важеля, і еластичними камерами, розташованими між ними, привод, виконаний у вигляді ведучого центрального черв'яка і двох діаметрально протилежно розташованих щодо нього черв'ячних коліс, які кінематично зв'язані з захватними важелями, який відрізняється тим, що привод захватного пристрою додатково оснащений двома веденими черв'яками, кожен з яких розташований діаметрально протилежно і паралельно ведучому центральному черв'яку, при цьому кожен ведений черв'як зв'язаний з ведучим черв'яком за допомогою зубчастої передачі, котра їх зв'язує, що виконана у вигляді пари циліндричних зубчастих коліс, що складається з шестерні і веденого зубчастого колеса, а вал кожного веденого зубчастого колеса зв'язаний з кожним веденим черв'яком через муфту, яка виконана з можливістю зустрічного осьового повороту веденого черв'яка і веденого зубчастого колеса в протилежних напрямках і фіксації їх у заданому положенні. 3 UA 71142 U Комп’ютерна верстка А. Крулевський Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 4
ДивитисяДодаткова інформація
Назва патенту англійськоюGripping device
Автори англійськоюAralkin Anatolii Serhiiovych, Dekhtiarenko Iryna Oleksandrivna, Aralkina Ksenia Anatoliivna, Perehudov Serhii Volodymyrovych
Назва патенту російськоюЗахватное устройство
Автори російськоюАралкин Анатолий Сергеевич, Дехтяренко Ирина Александровна, Аралкина Ксения Анатольевна, Перегудов Сергей Владимирович
МПК / Мітки
МПК: B25J 15/00, B25J 19/00
Код посилання
<a href="https://ua.patents.su/6-71142-zakhvatnijj-pristrijj.html" target="_blank" rel="follow" title="База патентів України">Захватний пристрій</a>
Захватний пристрій

Номер патенту: 2845
Опубліковано: 26.12.1994
Автори: Федоренко Павло Йосипович, Черконос Оксана Анатоліївна, Димченко Олег Васильович, Комащенко Віталій Іванович, Великий Михайло Ізраілевич, Черконос Анатолій Іванович
МПК: B66C 1/22
Формула / Реферат:
1. Захватное устройство, содержащее трос, концы которого связаны с подвеской для крюка подъемной машины, изогнутые от вертикальной оси симметрии захватные органы, связанные с ними и закрепленные на горизонтальных осях с возможностью перемещения по тросу ролики, отличающееся тем, что, с целью повышения надежности захвата груза с углублениями на боковых поверхностях, связь роликов с захватными органами выполнена в виде планок, расположенных...
Захватний пристрій, наприклад, кришки сталерозливного ковша
Номер патенту: 27308
Опубліковано: 25.10.2007
Автори: Бойко Володимир Семенович, Забелін Анатолій Семенович, Токій Анатолій Миколайович, Рославкер Валерій Абрамович, Євтєєв Володимир Никифорович, Овчаренко Петро Олексійович, Ларіонов Олександр Олексійович, Зайка Володимир Якович
МПК: F27B 21/06
Мітки: кришки, ковша, пристрій, наприклад, захватний, сталерозливного
Формула / Реферат:
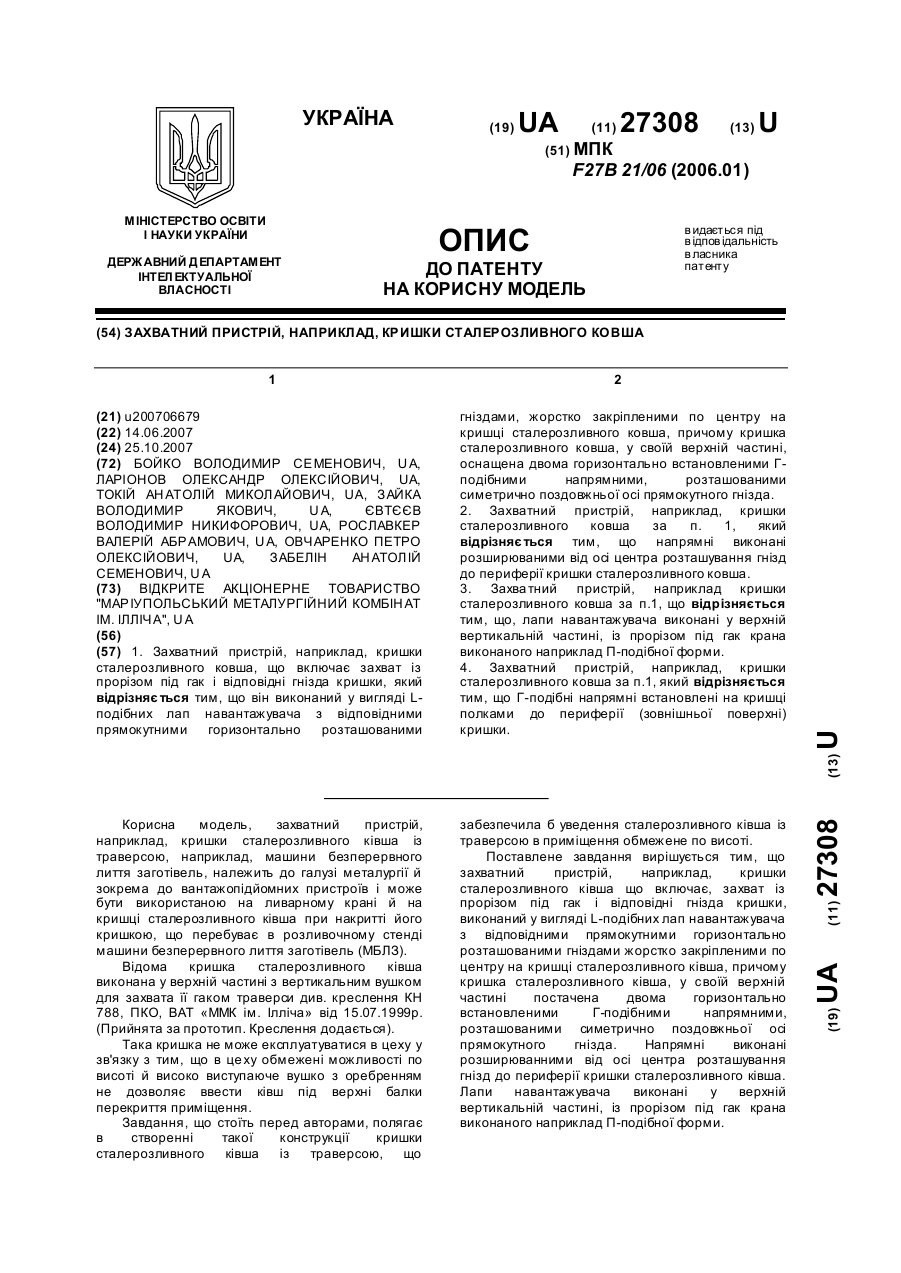
1. Захватний пристрій, наприклад, кришки сталерозливного ковша, що включає захват із прорізом під гак і відповідні гнізда кришки, який відрізняється тим, що він виконаний у вигляді L-подібних лап навантажувача з відповідними прямокутними горизонтально розташованими гніздами, жорстко закріпленими по центру на кришці сталерозливного ковша, причому кришка сталерозливного ковша, у своїй верхній частині, оснащена двома горизонтально встановленими...
Захватний пристрій для транспортування і кантування ланок рейкошпальної решітки
Номер патенту: 3798
Опубліковано: 27.12.1994
Автор: Лазоренко Микола Семенович
МПК: B66C 1/10
Мітки: рейкошпальної, решітки, транспортування, захватний, пристрій, ланок, кантування
Формула / Реферат:
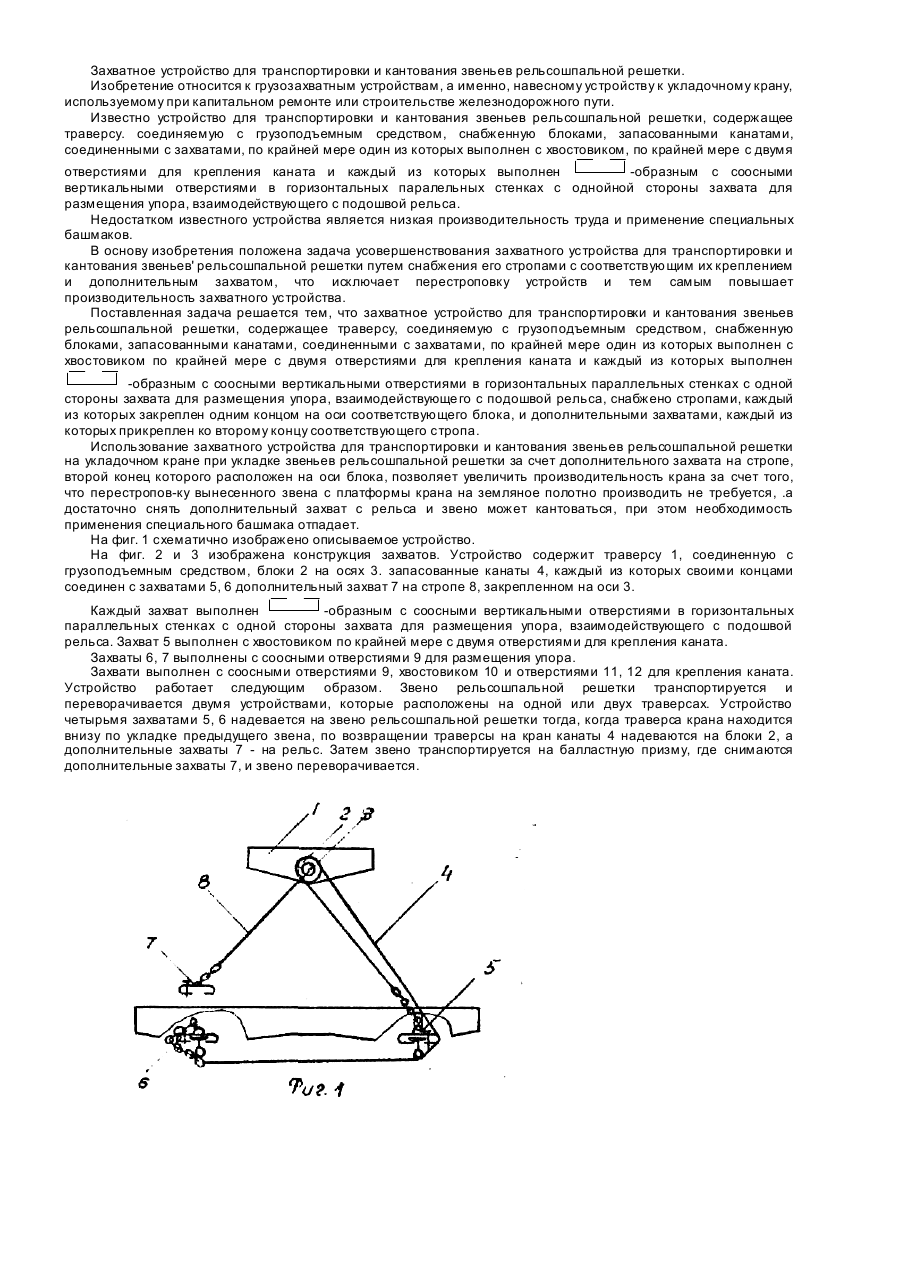
Захватное устройство для транспортировки и кантования звеньев рельсошпальной решетки, содержащее траверсу, соединяемую с грузоподъемным средством, снабженную блоками, запакованными канатами, соединенными с захватами, по крайней мере один из которых выполнен с хвостовиком по крайней мере с двумя отверстиями для крепления каната и каждый из которых выполнен -образным с...
Захватний пристрій

Номер патенту: 48486
Опубліковано: 25.03.2010
Автори: Шишов Валентин Павлович, Носко Павло Леонідович, Шисман Володимир Юхимович, Карпов Олексій Петрович, Філь Павло Володимирович
МПК: B25J 15/00
Формула / Реферат:
1. Захватний пристрій, що містить корпус, силовий механізм із двома поршнями і двома штоками, а також захватні важелі для синхронізації кутового переміщення, який відрізняється тим, що в нижній частині корпуса встановлено штангу, на якій закріплено два центри, розташовані з можливістю контакту із внутрішньою поверхнею шарнірів.2. Захватний пристрій за п. 1, який відрізняється тим, що щонайменше один із центрів встановлено з можливістю...
Захватний пристрій промислового робота
Номер патенту: 24280
Опубліковано: 25.06.2007
Автори: Мажара Віталій Анатолійович, Годунко Максим Олегович, Павленко Іван Іванович
МПК: B23Q 7/04, B23B 15/00
Мітки: захватний, промислового, робота, пристрій
Формула / Реферат:
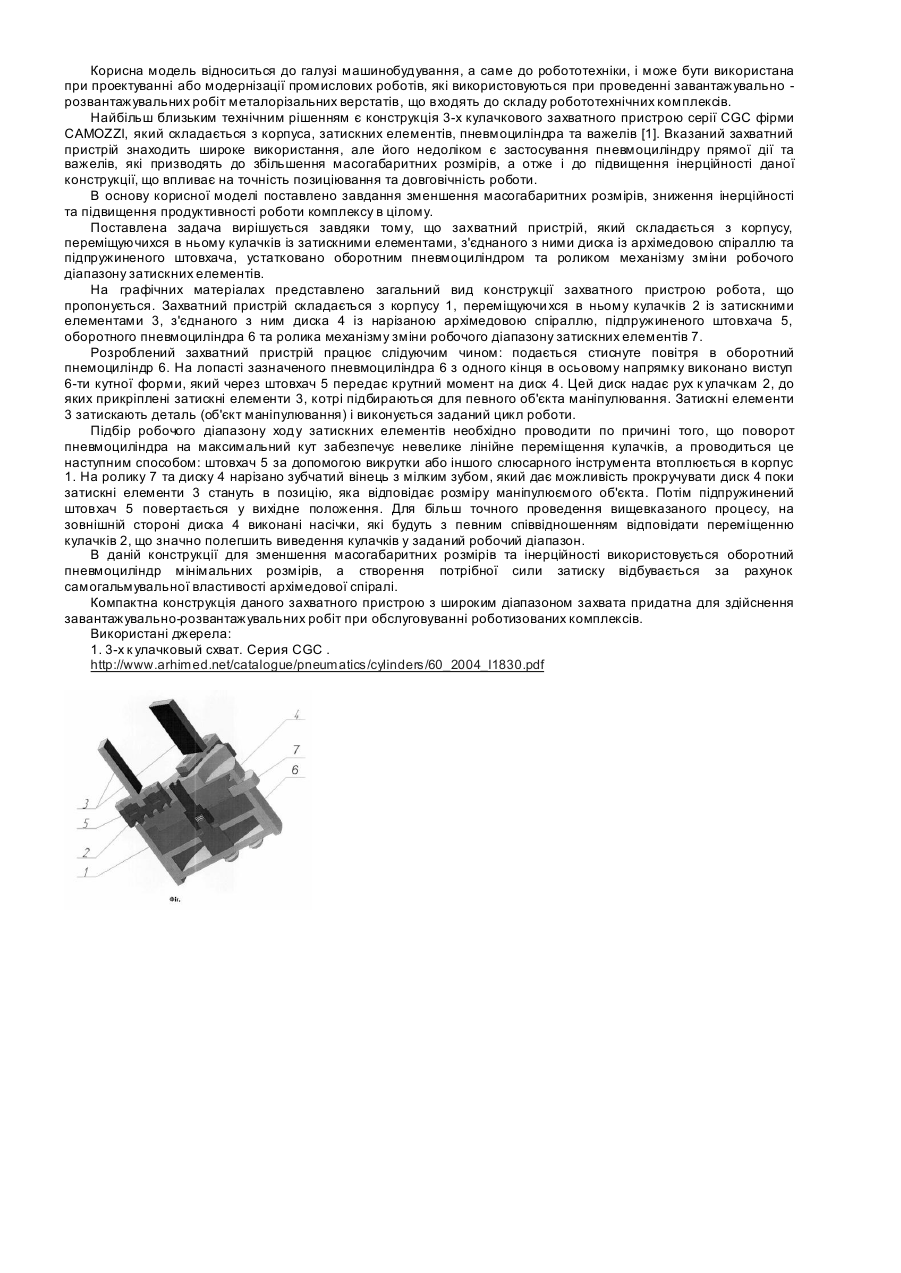
Захватний пристрій промислового робота, який складається з корпусу, кулачків із затискними елементами, що переміщуються в корпусі з'єднаного з ними диска із архімедовою спіраллю, та підпружиненого штовхача, який відрізняється тим, що його устатковано оборотним пневмоциліндром та роликом механізму зміни робочого діапазону затискних елементів.