Пристрій для реєстрації сигналу проковзування
Номер патенту: 93997
Опубліковано: 27.10.2014
Автори: Герасін Олександр Сергійович, Кондратенко Галина Володимирівна, Топалов Андрій Миколайович, Кондратенко Юрій Пантелійович

Формула / Реферат
Пристрій для реєстрації сигналу проковзування, що містить датчик проковзування, встановлений у конічному пазу принаймні однієї з губок захвату адаптивного робота, кожна з яких пов'язана із приводом їхнього переміщення, підключеним до виходу блока керування, вхід якого зв'язаний з блоком корекції стискального зусилля, який містить вимірювальний блок, детектор та аналого-цифровий перетворювач, поверхня паза виконана конічною, а датчик проковзування виконаний у вигляді стрижня, розташованого усередині паза конічної форми і одним кінцем зв'язаного з губкою, наконечника, розташованого на іншому кінці стрижня й підпружиненого до нього, та реєструвального елемента, виконаного у вигляді конденсатора, при цьому стрижень пружно зв'язаний з губкою, робочу поверхню наконечника виконано з еластичного матеріалу, а обкладинки конденсатора, що розташовані на зовнішній поверхні стрижня та внутрішній поверхні конічного паза, підключені до входів вимірювального блока, зв'язаного через детектор з аналого-цифровим перетворювачем, вихід якого підключений до блока керування приводом губок, який відрізняється тим, що один кінець стрижня зв'язаний з відповідною губкою за допомогою сферичного шарніра, а пружний зв'язок стрижня з губкою виконано у вигляді системи циліндричних пружин, закріплених одними кінцями на стрижні, а іншими - на внутрішній поверхні конічного паза, при цьому подовжні осі всіх пружин розташовані в площині, яка одночасно паралельна контактній поверхні відповідної губки, перпендикулярна подовжній осі стрижня і проходить між наконечником та обкладинками конденсатора, а подовжні осі будь-яких сусідніх пружин утворюють між собою однаковий за величиною кут.
Текст
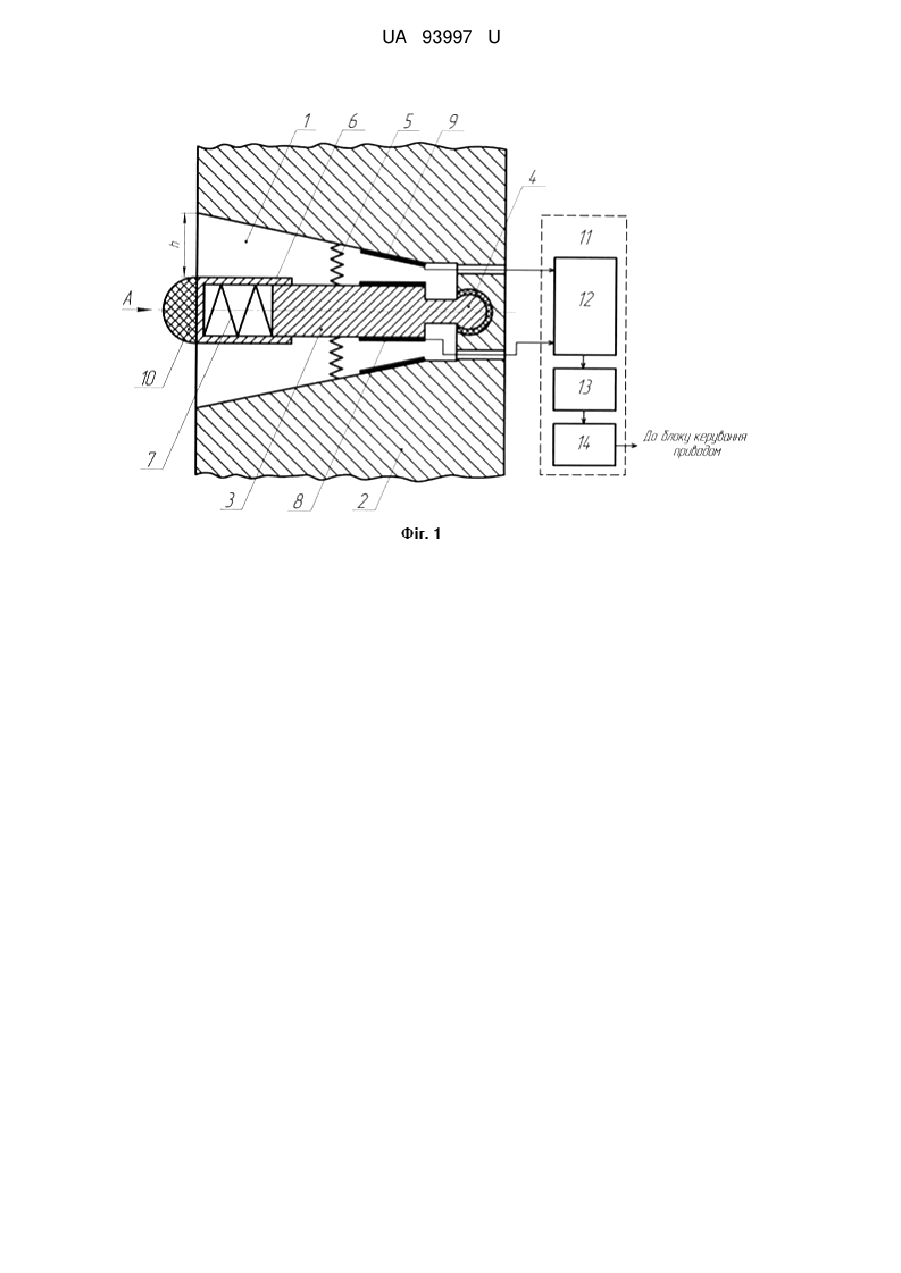
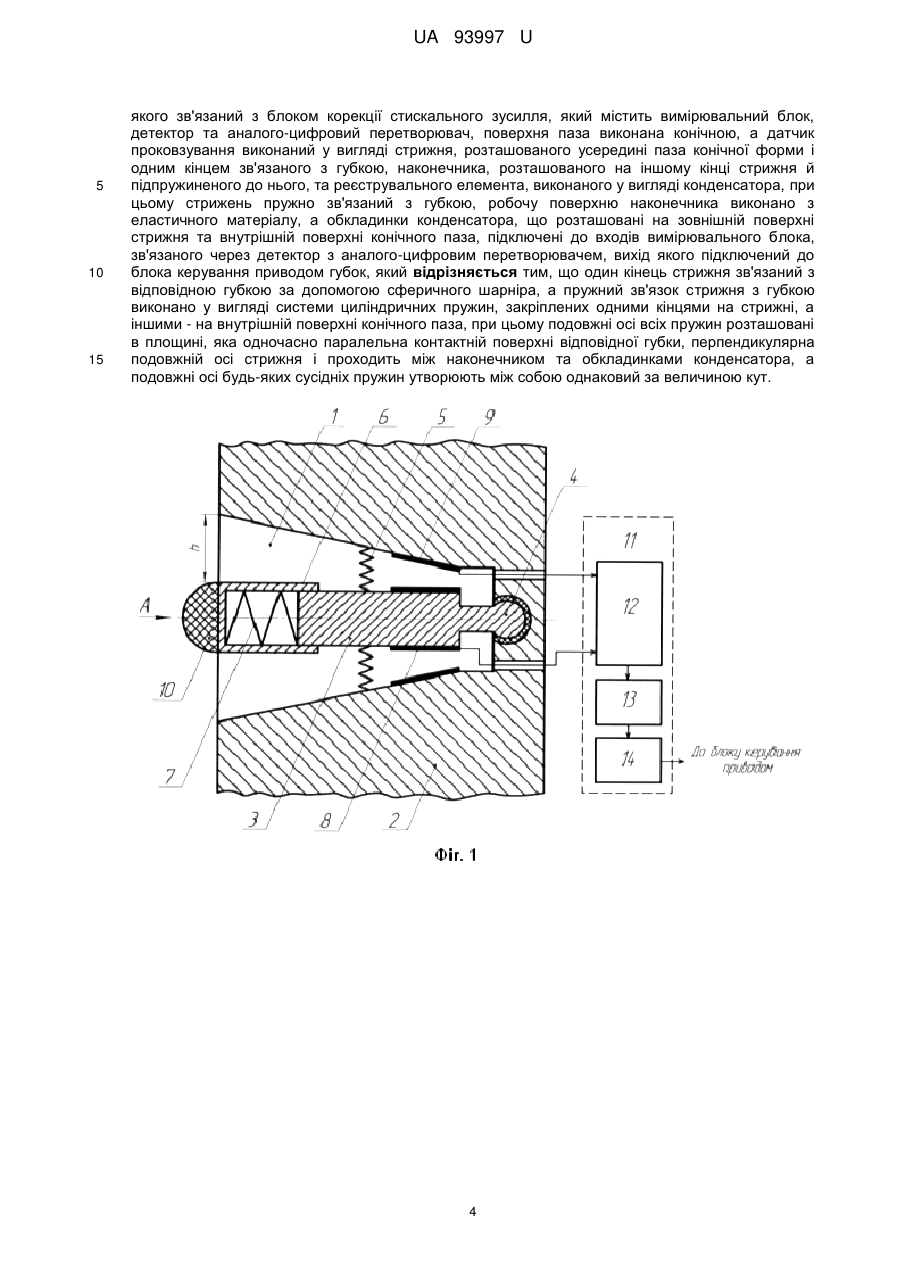
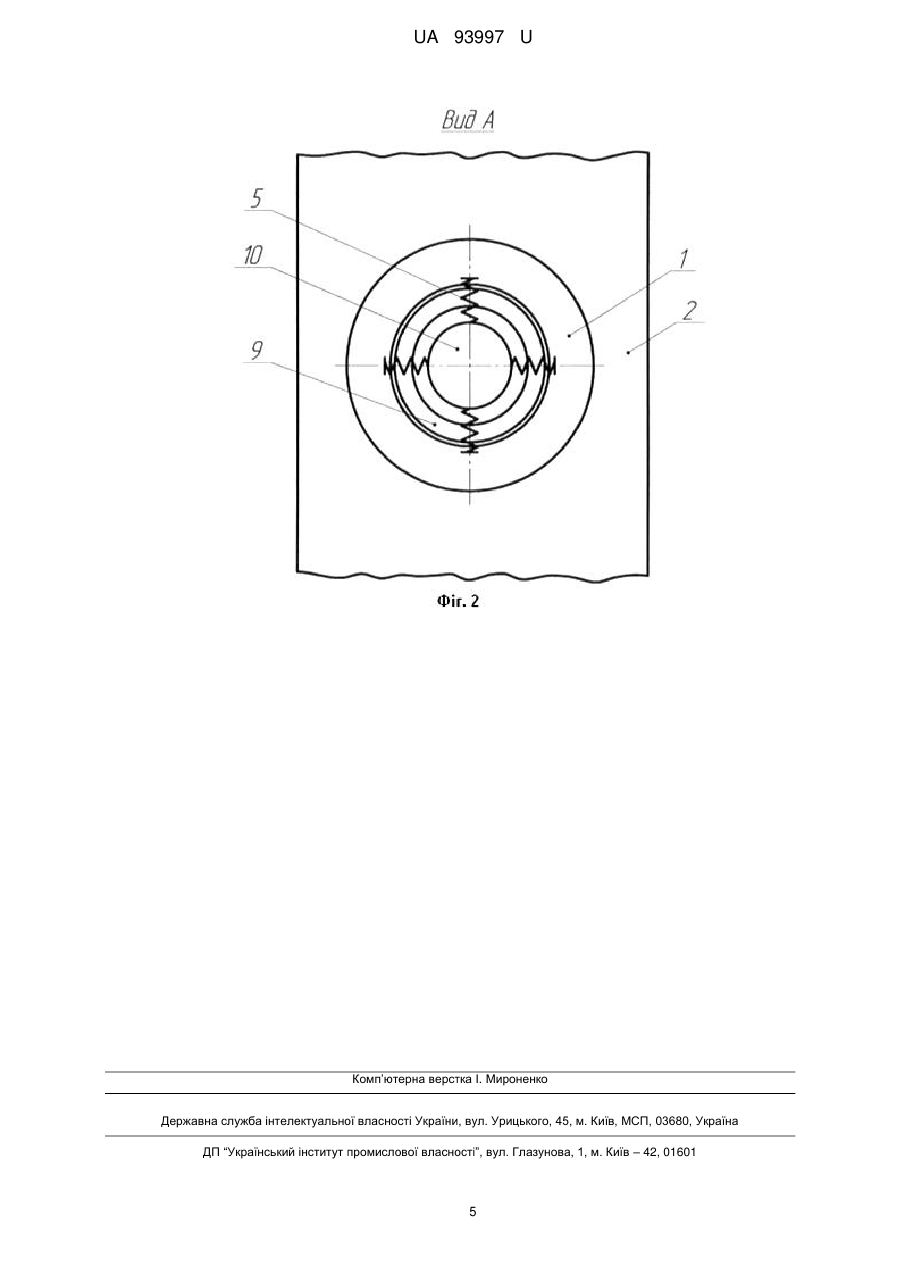
Реферат: Пристрій для реєстрації сигналу проковзування містить датчик проковзування, встановлений у конічному пазу принаймні однієї з губок захвату адаптивного робота, блок керування, блок корекції стискального зусилля, який містить вимірювальний блок, детектор та аналогоцифровий перетворювач, реєструвальний елемент виконаний у вигляді конденсатора. Поверхня паза виконана конічною, а датчик проковзування виконаний у вигляді стрижня. При цьому стрижень пружно зв'язаний з губкою, робочу поверхню наконечника виконано з еластичного матеріалу, а обкладинки конденсатора підключені до входів вимірювального блока, зв'язаного через детектор з аналого-цифровим перетворювачем, вихід якого підключений до блока керування приводом губок. Один кінець стрижня зв'язаний з відповідною губкою за допомогою сферичного шарніра, а пружний зв'язок стрижня з губкою виконано у вигляді системи циліндричних пружин, закріплених одними кінцями на стрижні, а іншими - на внутрішній поверхні конічного паза. При цьому подовжні осі всіх пружин розташовані в площині, яка одночасно паралельна контактній поверхні відповідної губки, перпендикулярна подовжній осі стрижня і проходить між наконечником та обкладинками конденсатора, а подовжні осі будьяких сусідніх пружин утворюють між собою однаковий за величиною кут. UA 93997 U (54) ПРИСТРІЙ ДЛЯ РЕЄСТРАЦІЇ СИГНАЛУ ПРОКОВЗУВАННЯ UA 93997 U UA 93997 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до робототехніки і може бути використана в конструкціях адаптивних роботів, які пристосовуються до ваги захоплюваних деталей. Відомо про пристрої для реєстрації проковзування деталі, що безпосередньо контактують з об'єктом маніпулювання (деталлю). У цих пристроях реєструється переміщення рухливого елемента датчика, що відбувається внаслідок проковзування деталі в захватному пристрої робота. Прикладом такого пристрою для реєстрації сигналу проковзування є датчик, що розміщується на губці захватного пристрою робота і містить корпус, в якому розміщено магнітну систему. До складу магнітної системи входить циліндричний ролик та закріплений на корпусі магніточутливий елемент, до складу якого входить реєстратор напруженості магнітного поля. Ролик виконано у вигляді принаймні одного замкнутого тороїдального намагніченого магнітопроводу з нанесеним на утворюючу поверхню ролика захисним пружним покриттям і з можливістю обертання ролика навколо своєї осі [Патент України на корисну модель № 24618, МПК В 25J 19/02, 2007]. Даний пристрій має такі недоліки: наявність періодичних зон з дуже низькою чутливістю датчика через те, що при використанні замкнутого тороїдального намагніченого магнітопроводу з радіальною полюсною намагніченістю як постійного магніту (ролика) на виході датчика спостерігається синусоїдальний сигнал, який характеризується низькою швидкістю зміни значення функції навколо її екстремумів (оскільки перша похідна в цих точках дорівнює 0); обмеженість області використання датчика через його підвищену реакцію на вплив паразитних магнітних полів. Найбільш близьким за технічною суттю пристроєм до корисної моделі є пристрій для реєстрації проковзування деталі у складі чутливого захвата маніпулятора [Авторське свідоцтво № 1252168, В 25J 19/02, 1986], що прийнятий за найближчий аналог. Зазначений захват містить губки з приводом їх переміщення, принаймні в одній з яких виконаний паз, де встановлений датчик проковзування деталі, і блок корекції зусилля стискання губок, пов'язаний з приводом переміщення губок. Поверхня паза виконана конічною, а датчик проковзування деталі виконаний у вигляді стрижня, пружно зв'язаного одним кінцем з губкою, наконечника, робоча поверхня якого виконана з еластичного матеріалу, розташованого на іншому кінці стрижня і підпружиненого до нього, і конденсатора, обкладки якого розташовані на зовнішній поверхні стрижня і внутрішній поверхні паза. Блок корекції зусилля стиснення губок включає з'єднані послідовно вимірювальний блок, детектор і аналого-цифровий перетворювач, при цьому конденсатор підключений до входу вимірювального блока, а вихід аналого-цифрового перетворювача з'єднаний з приводом губок. Такий пристрій має наступні недоліки: низька швидкодія пристрою при захоплюванні деталі, оскільки мають місце пружні деформації пружного елемента, за допомогою якого стрижень зв'язаний з губкою, та пружини наконечника, які призводять до виникнення серії згасаючих коливних рухів чутливого елемента (стрижня) і частини реєструвального елемента(конденсатора) вздовж подовжньої осі стрижня; низька надійність процесу реєстрації сигналу проковзування через можливість зміщення центру (точки) обертання стрижня при реалізації роботом спробних рухів за рахунок конструктивного виконання пружного елемента, який дозволяє стрижню здійснювати не тільки кутові, а і подовжні переміщення; низька швидкодія пристрою при повторному захоплюванні деталі з метою реалізації багатоетапного процесу її захоплювання, оскільки при розведенні губок і вивільненні деталі на кожному етапі чутливий елемент (стрижень) під дією пружного елемента, за допомогою якого стрижень зв'язаний з губкою, буде здійснювати серію згасаючих обертових (кутових) коливних рухів до його встановлення у початковий стан. В основу корисної моделі поставлено задачу удосконалення пристрою для реєстрації сигналу проковзування шляхом введення до його складу додаткових компонентів і зміни конструктивного виконання пристрою з метою підвищення швидкодії роботи пристрою при реєстрації сигналу проковзування. Поставлена задача вирішується тим, що до складу пристрою для реєстрації сигналу проковзування, який містить датчик проковзування, встановлений у конічному пазу принаймні однієї з губок захвату адаптивного робота, кожна з яких пов'язана із приводом їхнього переміщення, підключеним до виходу блока керування, вхід якого зв'язаний з блоком корекції стискального зусилля, який містить вимірювальний блок, детектор та аналого-цифровий перетворювач, поверхня паза виконана конічною, а датчик проковзування виконаний у вигляді стрижня, розташованого усередині паза конічної форми і одним кінцем зв'язаного з губкою, наконечника, розташованого на іншому кінці стрижня й підпружиненого до нього, та реєструвального елемента, виконаного у вигляді конденсатора, причому стрижень пружно 1 UA 93997 U 5 10 15 20 25 30 35 40 45 50 55 60 зв'язаний з губкою, робочу поверхню наконечника виконано з еластичного матеріалу, а обкладинки конденсатора, що розташовані на зовнішній поверхні стрижня та внутрішній поверхні конічного паза, підключені до входів вимірювального блока, зв'язаного через детектор з аналого-цифровим перетворювачем, вихід якого підключений до блока керування приводом губок, згідно з корисною моделлю. один кінець стрижня зв'язаний з відповідною губкою за допомогою сферичного шарніру, а пружний зв'язок стрижня з губкою виконано у вигляді системи циліндричних пружин, закріплених одними кінцями на стрижні, а іншими - на внутрішній поверхні конічного паза, причому подовжні осі всіх пружин розташовані в площині, яка одночасно паралельна контактній поверхні відповідної губки, перпендикулярна подовжній осі стрижня і проходить між наконечником та обкладинками конденсатора, а подовжні осі будь-яких сусідніх пружин утворюють між собою однаковий за величиною кут. Особливості запропонованої конструктивної побудови пристрою для реєстрації сигналу проковзування пов'язані з закріпленням стрижня на відповідній губці за допомогою сферичного шарніра та з розміщенням додаткової симетричної системи циліндричних пружин у конічному пазу на губці адаптивного робота, дозволяють усунути згасаючі подовжні коливні рухи чутливого елемента і частини реєструвального елемента при захоплюванні деталі та згасаючі кутові коливні рухи чутливого елемента і частини реєструвального елемента при повторному (багатоетапному) захоплюванні деталі, що підвищує швидкодію системи, а також виключити можливість зміщення центру (точки) обертання стрижня при реалізації роботом спробних рухів, що підвищує надійність процесів реєстрації сигналів проковзування. На Фіг. 1 представлено схему пристрою для реєстрації сигналу проковзування деталі в захватному пристрої адаптивного робота, а на Фіг. 2 - вид А на Фіг. 1. Пристрій для реєстрації сигналу проковзування містить датчик проковзування, встановлений у конічному пазу 1, принаймні, однієї з губок 2 захвату адаптивного робота. Кожна з губок 2 пов'язана з приводом їхнього переміщення, підключеним до виходу блоку керування приводом (на Фіг. 1 не показані). Датчик проковзування виконаний у вигляді стрижня 3, розташованого усередині паза конічної форми 1 і одним кінцем зв'язаного з губкою 2 за допомогою сферичного шарніра 4, симетричної системи циліндричних пружин 5, закріплених одними кінцями на стрижні 3, а іншими - на внутрішній поверхні конічного пазу 1, наконечника 6, розташованого на іншому кінці стрижня й підпружиненого до нього за допомогою пружини 7, та реєструвального елемента, виконаного у вигляді конденсатора з обкладинками 8 і 9. Робоча поверхня 10 наконечника 6 виконана з еластичного матеріалу. При цьому стрижень 3 встановлений у конічному пазу 1 губки 2 захвата адаптивного робота з забезпеченням можливості кутового відхилення від його подовжньої осі в межах геометричних розмірів конічного паза 1. Подовжні осі всіх пружин 5 розташовані в площині, яка одночасно паралельна контактній поверхні відповідної губки 2 та перпендикулярна подовжній осі стрижня 3. Площина, в якій розташовані подовжні осі всіх пружин 5, проходить між наконечником 6 та обкладинками конденсатора 8 і 9. Подовжні осі будь-яких сусідніх пружин 5 утворюють між собою однаковий за величиною кут, чим забезпечується властивість симетричності додаткової системи циліндричних пружин 5. Вхід блока керування приводом (на Фіг. 1 не показаний) зв'язаний з виходом блока корекції стискального зусилля 11, який включає вимірювальний блок 12, детектор 13 та аналогоцифровий перетворювач 14. Обкладинки конденсатора 8 і 9, що розташовані на зовнішній поверхні стрижня 3 та внутрішній поверхні конічного паза 1, підключені до входів вимірювального блока 12, зв'язаного послідовно через детектор 13 з аналого-цифровим перетворювачем 14, вихід якого є безпосереднім виходом блоку корекції стискального зусилля 11. Запропонований пристрій працює наступним чином. У початковому стані стрижень 3, закріплений за допомогою сферичного шарніра 4 та системи циліндричних пружин 5 в губці 2, виступає над контактною поверхнею губки 2 на величину, що залежить від значення мінімального стискального зусилля губок 2 захватного пристрою перед початком виконання адаптивним роботом першого спробного руху. При цьому сигнали на виході конденсатора з обкладинками 8 і 9 мають фіксовані значення, що відповідають початковому положенню стрижня 3. При захоплюванні деталі губки 2 захвата адаптивного робота за допомогою привода стискаються і поверхня деталі контактує з еластичним покриттям робочої поверхні 10 наконечника 6. При цьому пружина 7 стискається і наконечник 6 стрижня 3 занурюється в конічний паз 1 відповідної губки 2, а деталь знаходиться між губками 2 в затиснутому стані з мінімальним стискальним зусиллям губок 2 захватного пристрою перед початком виконання першого спробного руху адаптивним роботом. Після цього адаптивним роботом здійснюється перший спробний рух з метою виявлення відповідності величин стискального зусилля і наперед невідомої маси об'єкта маніпулювання. 2 UA 93997 U 5 10 15 20 25 30 35 40 45 50 Якщо при спробному русі захватного пристрою адаптивного робота деталь починає проковзувати, то внаслідок виникнення тертя між поверхнею об'єкта маніпулювання та робочою поверхнею 10 наконечника 6 відбувається відхилення стрижня 3 від його подовжньої осі в напрямку, протилежному напрямку вертикального підйому захватного пристрою при виконанні спробного руху. При цьому стрижень 3 повертається відносно точки його закріплення на губці 2, а разом з цим відбувається зміна стану сферичного підшипника 4 та пружна деформація симетричної системи циліндричних пружин 5, в результаті якої відповідно до напрямку відхилення стрижня 3 деякі з пружин 5 розтягуються, а інші - стискаються. Таким чином, якщо величина стискального зусилля не відповідає величині маси деталі, то деталь і точка контакту деталі з робочою поверхнею 10 наконечника 6 стрижня 3 залишаються в початковому стані, а інший кінець стрижня 3, яким стрижень 3 закріплений на губці 2, пересувається разом з захватним пристроєм, змінюючи положення подовжньої осі стрижня 3. При цьому величина кута повороту стрижня 3 залежить від величини вертикального переміщення захватного пристрою при спробному русі та обмежена розмірами конічного пазу 1 і граничною деформацією циліндричних пружин 5, які закріплені одними кінцями на стрижні 3 між наконечником 6 та обкладинкою конденсатора 8, а іншими - на внутрішній поверхні конічного паза 1. Оскільки під час проковзування деталі стрижень 3 відхиляється по ходу проковзування деталі разом з робочою поверхнею 10 наконечника 6, то при цьому обкладинка конденсатора 8 змінює своє положення відносно обкладинки 9. Це в свою чергу призводить до зміни електричної ємності конденсатора, яка реєструється, детектується та трансформується в цифровий сигнал блоком корекції стискального зусилля 11. При цьому вимірювальний блок 12 реєструє зміни електричної ємності конденсатора, зміна напруги на виході вимірювального блока 12, пропорційна зміні електричної ємності конденсатора, детектується детектором 13, а аналоговий сигнал з виходу детектора 13, що відповідає сигналу проковзування, поступає на вхід аналого-цифрового перетворювача 14. Зміна напруги викликає зміну сигналів аналогоцифрового перетворювача 14, на виході якого при цьому формуються тактові імпульси. Тактові імпульси з аналого-цифрового перетворювача 14 є вихідними сигналами блока корекції стискального зусилля 11, що надходять на вхід блока керування приводом переміщення губок (на фіг. 1 не показаний), де за наявності першого ж тактового імпульсу формується сигнал для збільшення стискального зусилля. Якщо величини стискального зусилля недостатньо для надійного утримання деталі, то на наступному кроці всі операції повторюються. Процес адаптації пристрою до ваги деталі здійснюється доти, поки не буде створена величина стискального зусилля, яка є достатньою для надійного утримання деталі. Сферичний шарнір 4 та додаткова система циліндричних пружин 5 забезпечують однакове початкове положення стрижня 3 і обкладинок конденсатора 8 та 9 перед кожним спробним рухом, що зменшує час між спробними рухами, усуває згасаючі подовжні коливальні рухи стрижня 3 (і обкладинки конденсатора 8, відповідно) при захоплюванні деталі, що підвищує швидкодію системи. Після реалізації адаптивним роботом заданої траєкторії переміщення захватного пристрою губки 2 розтискаються, звільнюючи деталь, а стрижень 3 (чутливий елемент) повертається в початковий стан за рахунок пружних властивостей деформованої в процесі виконання спробних рухів додаткової симетричної системи циліндричних пружин 5. Оскільки подовжні осі всіх пружин 5 розташовані в площині, яка одночасно паралельна контактній поверхні відповідної губки 2, перпендикулярна подовжній осі стрижня 3 та проходить між наконечником 6 та обкладинками конденсатора 8 і 9, то після вивільнення деталі з губок 2 захватного пристрою всі пружини 5 симетричної системи пружин 5 приводяться до початкового (симетричного) стану, зокрема відповідні розтягнуті (в процесі здійснення роботом спробних рухів) пружини 5 стискаються до початкового стану, а стиснуті пружини 5 - розтискаються до початкового стану. Позитивний ефект проявляється в тому, що в порівнянні з найближчим аналогом до складу запропонованого пристрою введені додаткові конструктивні елементи, що дозволяють підвищити швидкодію пристрою за рахунок зменшення тривалості часу між спробними рухами адаптивного робота та прискорення процесу захоплювання деталі перед першим спробним рухом. При цьому підвищується ефективність процесів надійного утримання деталей (об'єктів маніпулювання) з попередньо невідомою масою. 55 ФОРМУЛА КОРИСНОЇ МОДЕЛІ 60 Пристрій для реєстрації сигналу проковзування, що містить датчик проковзування, встановлений у конічному пазу принаймні однієї з губок захвату адаптивного робота, кожна з яких пов'язана із приводом їхнього переміщення, підключеним до виходу блока керування, вхід 3 UA 93997 U 5 10 15 якого зв'язаний з блоком корекції стискального зусилля, який містить вимірювальний блок, детектор та аналого-цифровий перетворювач, поверхня паза виконана конічною, а датчик проковзування виконаний у вигляді стрижня, розташованого усередині паза конічної форми і одним кінцем зв'язаного з губкою, наконечника, розташованого на іншому кінці стрижня й підпружиненого до нього, та реєструвального елемента, виконаного у вигляді конденсатора, при цьому стрижень пружно зв'язаний з губкою, робочу поверхню наконечника виконано з еластичного матеріалу, а обкладинки конденсатора, що розташовані на зовнішній поверхні стрижня та внутрішній поверхні конічного паза, підключені до входів вимірювального блока, зв'язаного через детектор з аналого-цифровим перетворювачем, вихід якого підключений до блока керування приводом губок, який відрізняється тим, що один кінець стрижня зв'язаний з відповідною губкою за допомогою сферичного шарніра, а пружний зв'язок стрижня з губкою виконано у вигляді системи циліндричних пружин, закріплених одними кінцями на стрижні, а іншими - на внутрішній поверхні конічного паза, при цьому подовжні осі всіх пружин розташовані в площині, яка одночасно паралельна контактній поверхні відповідної губки, перпендикулярна подовжній осі стрижня і проходить між наконечником та обкладинками конденсатора, а подовжні осі будь-яких сусідніх пружин утворюють між собою однаковий за величиною кут. 4 UA 93997 U Комп’ютерна верстка І. Мироненко Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 5
ДивитисяДодаткова інформація
Автори англійськоюKondratenko Yurii Panteliiovych, Kondratenko Halyna Volodymyrivna
Автори російськоюКондратенко Юрий Пантелеевич, Кондратенко Галина Владимировна
МПК / Мітки
МПК: B25J 19/02
Мітки: реєстрації, пристрій, сигналу, проковзування
Код посилання
<a href="https://ua.patents.su/7-93997-pristrijj-dlya-reehstraci-signalu-prokovzuvannya.html" target="_blank" rel="follow" title="База патентів України">Пристрій для реєстрації сигналу проковзування</a>
Пристрій для реєстрації сигналу проковзування
Номер патенту: 93671
Опубліковано: 10.10.2014
Автори: Топалов Андрій Миколайович, Кондратенко Юрій Пантелійович, Герасін Олександр Сергійович
МПК: B25J 19/02
Мітки: реєстрації, проковзування, пристрій, сигналу
Формула / Реферат:
Пристрій для реєстрації сигналу проковзування, що містить датчик проковзування, встановлений у конічному пазу, принаймні, однієї з губок захвату адаптивного робота, кожна з яких пов'язана з приводом їхнього переміщення, підключеним до виходу блока керування, вхід якого зв'язаний з блоком корекції стискального зусилля, який містить вимірювальний блок, детектор та аналого-цифровий перетворювач, а датчик проковзування виконаний у вигляді...
Двокоординатний пристрій для реєстрації сигналу проковзування
Номер патенту: 82115
Опубліковано: 25.07.2013
Автори: Кондратенко Юрій Пантелійович, Запорожець Юрій Михайлович
МПК: B25J 19/02, G05B 19/00
Мітки: проковзування, пристрій, двокоординатний, реєстрації, сигналу
Формула / Реферат:
Двокоординатний пристрій для реєстрації сигналу проковзування, що містить датчик проковзування, встановлений принаймні на одній з губок хвату робота, кожна з яких пов'язана із приводом їхнього переміщення, підключеним до блока керування, і виконаний у вигляді розташованого усередині співвісних основного та додаткового пазів конічної форми стрижня й наконечника, розташованого на одному кінці стрижня й підпружиненого до нього, причому стрижень...
Пристрій для реєстрації сигналу проковзування
Номер патенту: 79155
Опубліковано: 25.05.2007
Автори: Кондратенко Юрій Пантелійович, Кондратенко Володимир Юрійович, Шишкін Олександр Сергійович
МПК: B25J 13/08, B25J 19/02
Мітки: сигналу, пристрій, проковзування, реєстрації
Формула / Реферат:
1. Пристрій для реєстрації сигналу проковзування, що містить датчик проковзування, встановлений принаймні на одній з губок схвата робота, кожна з яких зв'язана із приводом їхнього переміщення, підключеним до блока керування, і виконаний у вигляді розташованого усередині основного паза конічної форми стрижня й наконечника, розташованого на одному кінці стрижня й підпружиненого до нього, причому стрижень пружно зв'язаний з губкою, а робочу...
Пристрій для реєстрації сигналу проковзування
Номер патенту: 14566
Опубліковано: 15.05.2006
Автори: Шишкін Олександр Сергійович, Кондратенко Володимир Юрійович, Кондратенко Юрій Пантелійович
МПК: B25J 19/02
Мітки: реєстрації, проковзування, сигналу, пристрій
Формула / Реферат:
Пристрій для реєстрації сигналу проковзування, що містить датчик проковзування, встановлений принаймні на одній з губок кліщів робота, кожна з яких зв'язана із приводом їх переміщення, підключеним до блока керування, і виконаний у вигляді ролика з інформаційними елементами, розташованими паралельно осі обертання ролика, джерела і приймача світла, зв'язаних з блоком керування, який відрізняється тим, що датчик проковзування оснащений...
Датчик для реєстрації проковзування з дискретним вихідним сигналом
Номер патенту: 27722
Опубліковано: 12.11.2007
Автори: Кондратенко Володимир Юрійович, Чернов Сергій Констянтинович, Шишкін Олександр Сергійович, Марковський Ігор Володимирович, Кондратенко Юрій Пантелійович
МПК: B25J 19/02
Мітки: сигналом, вихідним, реєстрації, проковзування, дискретним, датчик
Формула / Реферат:
Датчик для реєстрації проковзування з дискретним вихідним сигналом, що містить реєструвальний елемент, виконаний у вигляді принаймні одного конденсатора, та чутливий елемент, встановлений принаймні на одній з губок захватного пристрою робота, кожна з яких зв'язана із приводом їхнього переміщення, підключеним до блока керування, чутливий елемент виконаний у вигляді стрижня з наконечником, розташованого усередині основного паза конічної форми,...
Попередній патент: Уніполярний дисковий генератор
Наступний патент: Спосіб порівняння папілярних візерунків пальців
Випадковий патент: Спосіб одержання подвійного поліфосфату цезію-титану (iv)