Система керування перевантажуванням зібраної маси у сільськогосподарській збиральній машині
Формула / Реферат
1. Система керування перевантажуванням для керування потоком зібраної рослинної маси, що вивантажується з перевантажувального пристрою (5) сільськогосподарської збиральної машини (2), причому перевантажувальний пристрій (5) на одному кінці обладнаний дефлектором (11), а зібрана рослинна маса (4) передається на транспортний засіб (6), причому система керування перевантажуванням здійснює визначення взаємного положення, керування вихідним потоком зібраної рослинної маси і включає систему керування направленням для водія сільськогосподарської збиральної машини (2), яка відрізняється тим, що точка потрапляння потоку (15) зібраної рослинної маси в зоні транспортного засобу (6) визначається положенням перевантажувального пристрою (5) та положенням дефлектора (11), причому положення перевантажувального пристрою (5) і положення дефлектора (11) задається у математичній моделі векторами (А, В, С, D, Е).
2. Система за п. 1, яка відрізняється тим, що визначення взаємного положення здійснюється між сільськогосподарською збиральною машиною (2) і щонайменше одним транспортним засобом (6).
3. Система за п. 1 або 2, яка відрізняється тим, що керування вихідним потоком зібраної рослинної маси включає узгоджуване одне з одним регулювання положення перевантажувального пристрою (5) і положення дефлектора (11).
4. Система за будь-яким з попередніх пунктів, яка відрізняється тим, що точка (12) потрапляння потоку (15) зібраної рослинної маси на транспортний засіб (6) задається вектором (Z) цільової точки.
5. Система за п. 4, яка відрізняється тим, що вектор (Z) цільової точки утворений векторним підсумовуванням вертикального вектора (А), вектора (В) перевантажувального пристрою і вектора (С) потоку зібраної рослинної маси.
6. Система за п. 4 або 5, яка відрізняється тим, що вектор (Z) цільової точки утворений векторним підсумовуванням вектора (D) взаємного положення і вектора (Е) точки завантаження.
7. Система за будь-яким з попередніх пунктів, яка відрізняється тим, що точка (12) потрапляння зібраної рослинної маси (4) переміщається на транспортному засобі (6) по заданій траєкторії.
8. Система за будь-яким з попередніх пунктів, яка відрізняється тим, що точка (12) потрапляння зібраної рослинної маси (4) розташована в межах віртуальної растрової сітки (22).
9. Система за п. 8, яка відрізняється тим, що віртуальна растрова сітка (22) утворена з можливістю зміни її положення та/або розмірів.
10. Система за пп. 8 і 9, яка відрізняється тим, що віртуальна растрова сітка (22) поділена на декілька віртуальних зон (23).
11. Система за п. 10, яка відрізняється тим, що віртуальні зони (23) утворені з можливістю зміни їхніх розмірів.
12. Система за п. 10 або 11, яка відрізняється тим, що віртуальна растрова сітка (22) і віртуальні зони (23) утворені з можливістю керування.
13. Система за пп. 10-12, яка відрізняється тим, що керування точкою (12) потрапляння потоку зібраної маси здійснюється в межах віртуальної растрової сітки (22) та віртуальних зон (23) шляхом натискання на клавіатуру.
14. Система за пп. 8-13, яка відрізняється тим, що перевантажувальний пристрій (5) виконаний з можливістю повертатися залежно від положення і/або розмірів віртуальної растрової сітки (22).
15. Система за п. 14, яка відрізняється тим, що діапазон поворотів перевантажувального пристрою (5) визначається віртуальними зонами (23).
16. Система за будь-яким з попередніх пунктів, яка відрізняється тим, що точка (12) потрапляння потоку зібраної маси є регульованою.
17. Система за пп. 4-16, яка відрізняється тим, що вектор (Z) цільової точки є змінюваним.
18. Система за будь-яким з попередніх пунктів, яка відрізняється тим, що точка (12) потрапляння потоку зібраної маси розташована на прямій або на криволінійній траєкторії.
19. Система за будь-яким з попередніх пунктів, яка відрізняється тим, що переміщення точки (12) потрапляння потоку зібраної маси здійснюється за допомогою транспортного засобу (6).
20. Система за будь-яким з попередніх пунктів, яка відрізняється тим, що додатково передбачена система керування рухом, яка вказує положення сільськогосподарської збиральної машини (2) відносно до транспортного засобу (6).
21. Система за будь-яким з попередніх пунктів, яка відрізняється тим, що перевантажувальний пристрій (5) виконаний з можливістю повертатися автоматично або вручну.
22. Система за будь-яким з попередніх пунктів, яка відрізняється тим, що приймає сигнали для визначення положення сільськогосподарської збиральної машини (2) відносно транспортного засобу (6) через глобальну супутникову навігаційну систему GPS, a також сигнали для керування вихідним потоком зібраної рослинної маси залежно від положення перевантажувального пристрою (5), обробляє сигнали і передає у систему керування направленням для водія сільськогосподарської збиральної машини (2).
Текст
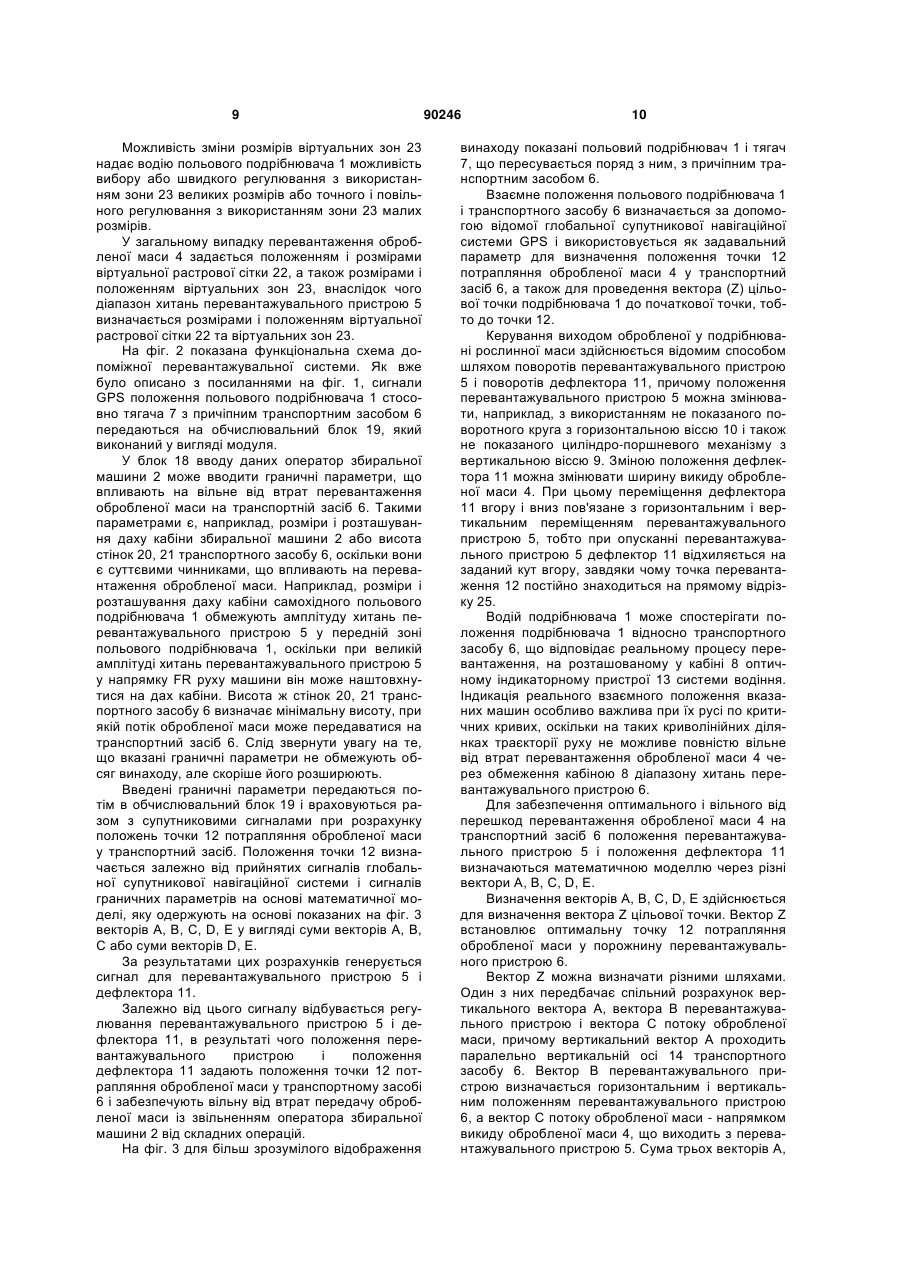
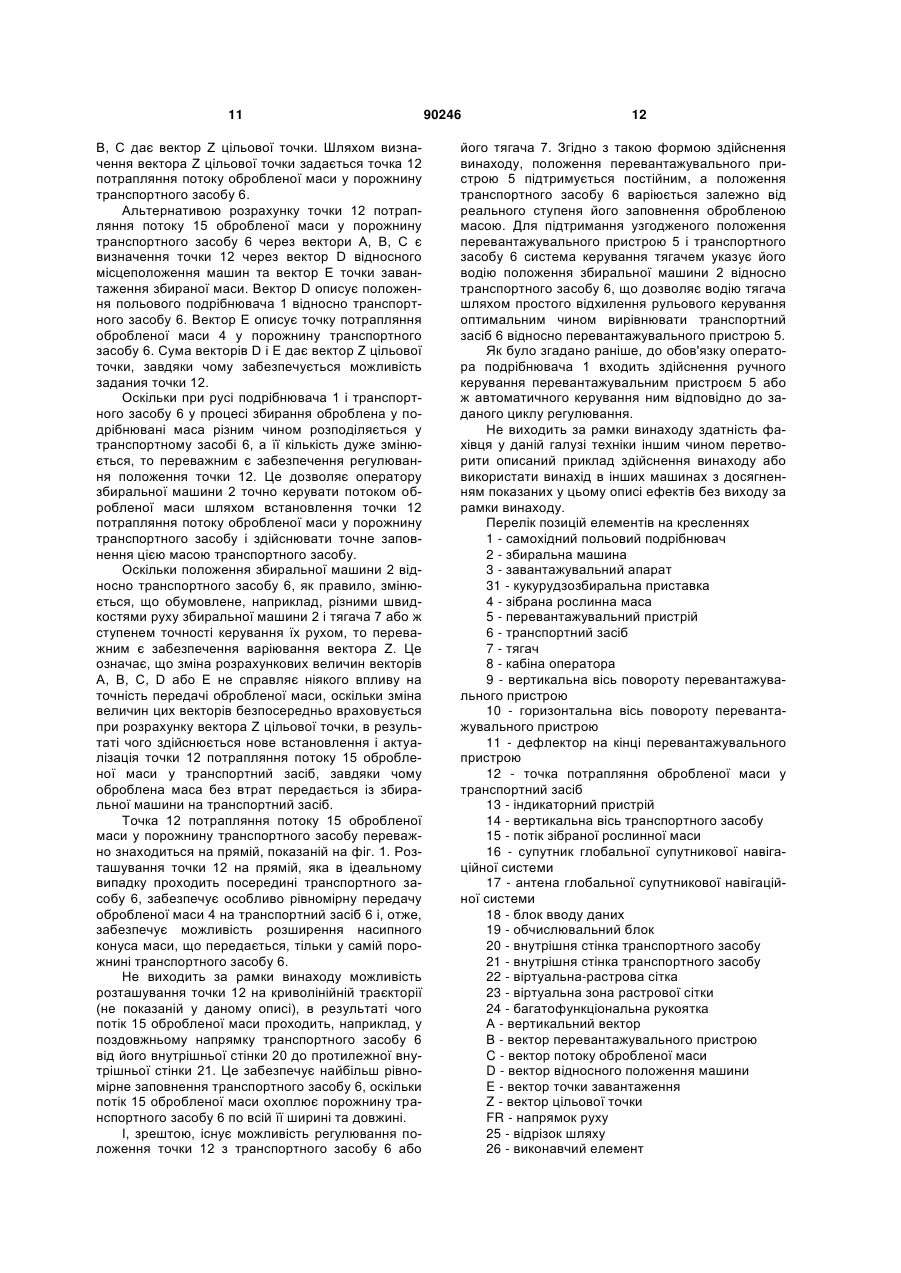
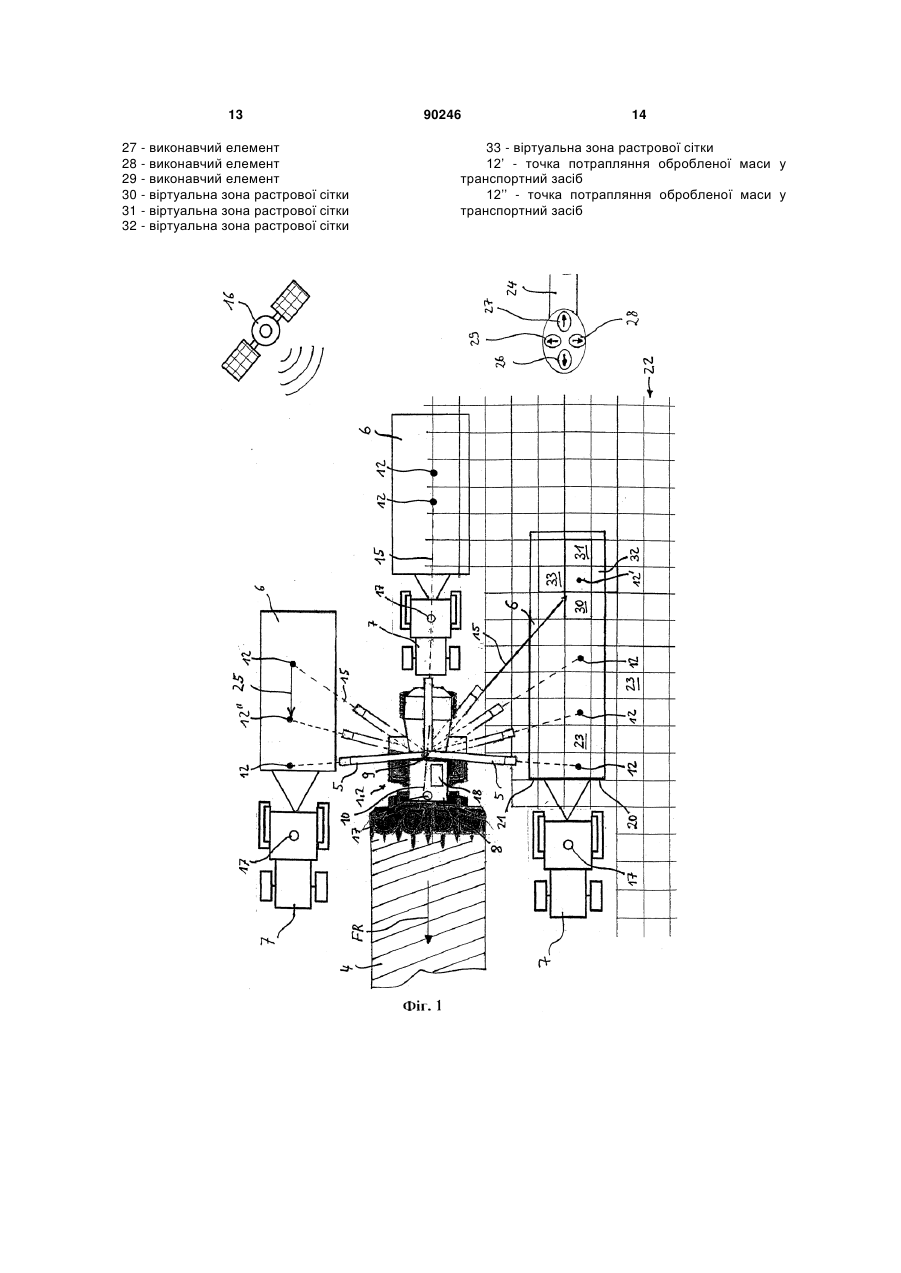
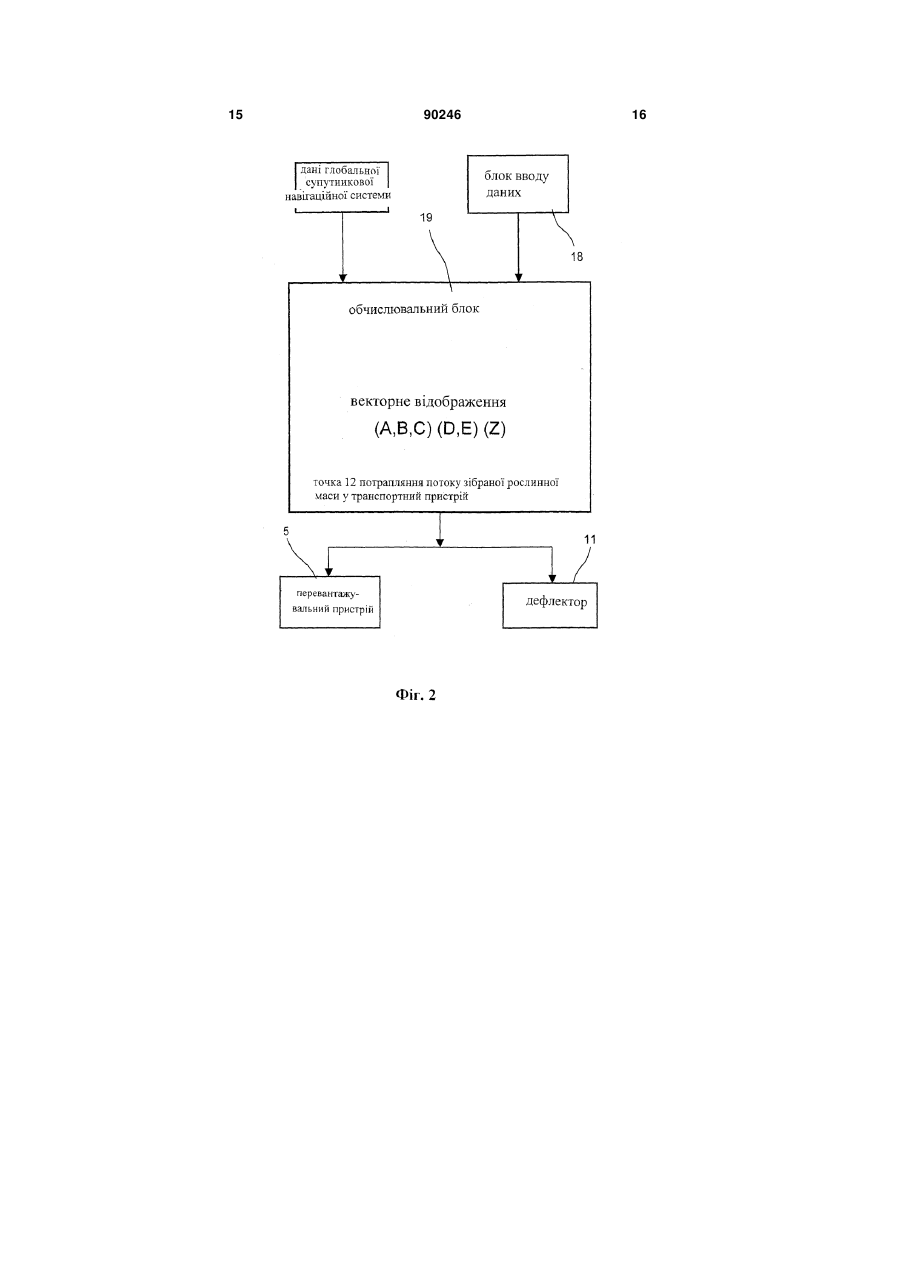
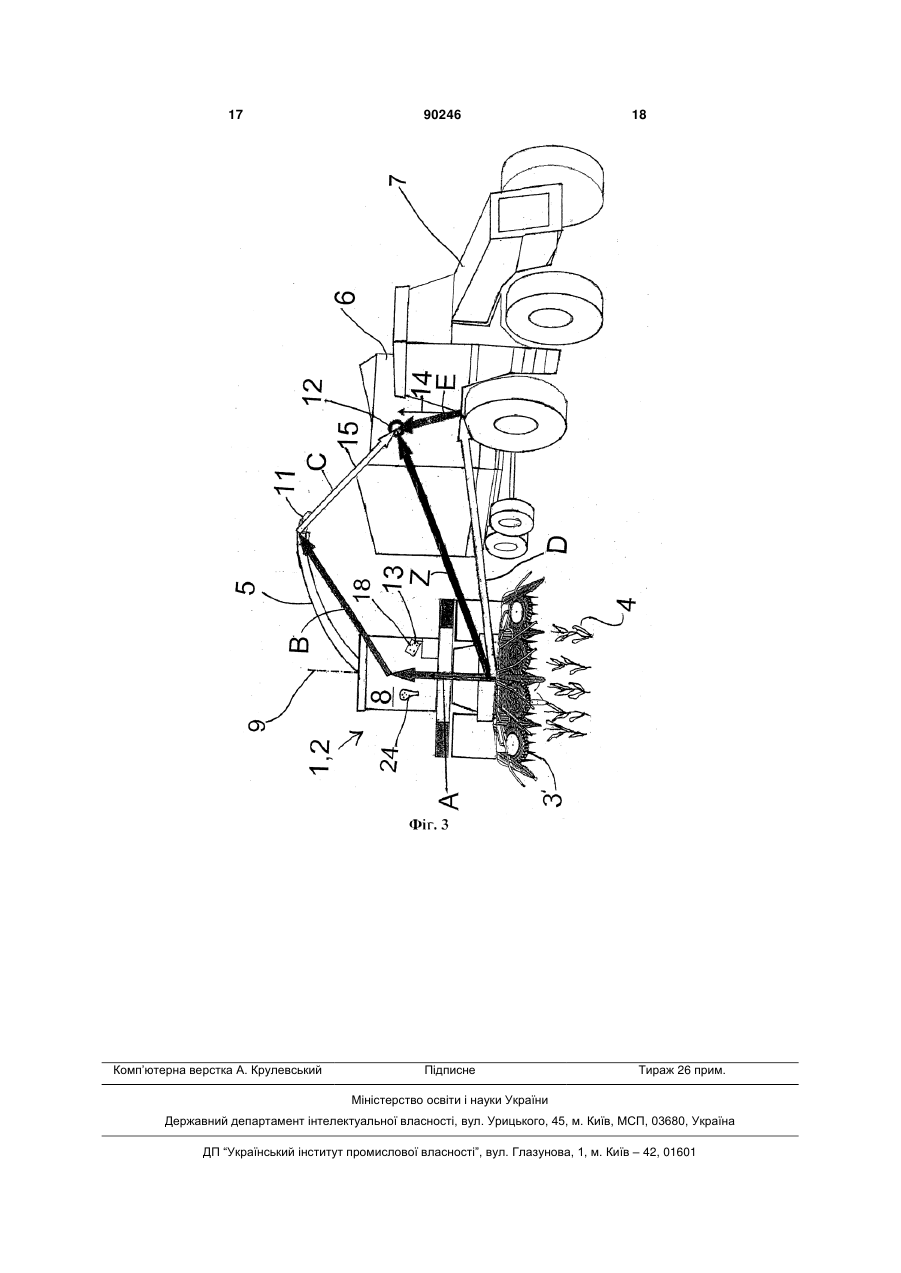
1. Система керування перевантажуванням для керування потоком зібраної рослинної маси, що вивантажується з перевантажувального пристрою (5) сільськогосподарської збиральної машини (2), причому перевантажувальний пристрій (5) на одному кінці обладнаний дефлектором (11), а зібрана рослинна маса (4) передається на транспортний засіб (6), причому система керування перевантажуванням здійснює визначення взаємного положення, керування вихідним потоком зібраної рослинної маси і включає систему керування направленням для водія сільськогосподарської збиральної машини (2), яка відрізняється тим, що точка потрапляння потоку (15) зібраної рослинної маси в зоні транспортного засобу (6) визначається положенням перевантажувального пристрою (5) та положенням дефлектора (11), причому положення перевантажувального пристрою (5) і положення дефлектора (11) задається у математичній моделі векторами (А, В, С, D, Е). 2. Система за п. 1, яка відрізняється тим, що визначення взаємного положення здійснюється між 2 (19) 1 3 90246 4 трової сітки (22) та віртуальних зон (23) шляхом натискання на клавіатуру. 14. Система за пп. 8-13, яка відрізняється тим, що перевантажувальний пристрій (5) виконаний з можливістю повертатися залежно від положення і/або розмірів віртуальної растрової сітки (22). 15. Система за п. 14, яка відрізняється тим, що діапазон поворотів перевантажувального пристрою (5) визначається віртуальними зонами (23). 16. Система за будь-яким з попередніх пунктів, яка відрізняється тим, що точка (12) потрапляння потоку зібраної маси є регульованою. 17. Система за пп. 4-16, яка відрізняється тим, що вектор (Z) цільової точки є змінюваним. 18. Система за будь-яким з попередніх пунктів, яка відрізняється тим, що точка (12) потрапляння потоку зібраної маси розташована на прямій або на криволінійній траєкторії. 19. Система за будь-яким з попередніх пунктів, яка відрізняється тим, що переміщення точки (12) потрапляння потоку зібраної маси здійснюється за допомогою транспортного засобу (6). 20. Система за будь-яким з попередніх пунктів, яка відрізняється тим, що додатково передбачена система керування рухом, яка вказує положення сільськогосподарської збиральної машини (2) відносно до транспортного засобу (6). 21. Система за будь-яким з попередніх пунктів, яка відрізняється тим, що перевантажувальний пристрій (5) виконаний з можливістю повертатися автоматично або вручну. 22. Система за будь-яким з попередніх пунктів, яка відрізняється тим, що приймає сигнали для визначення положення сільськогосподарської збиральної машини (2) відносно транспортного засобу (6) через глобальну супутникову навігаційну систему GPS, a також сигнали для керування вихідним потоком зібраної рослинної маси залежно від положення перевантажувального пристрою (5), обробляє сигнали і передає у систему керування направленням для водія сільськогосподарської збиральної машини (2). Винахід стосується системи керуванням процесу перевантажуванням зібраної рослинної маси у сільськогосподарській збиральній машині. Такі самохідні збиральні машини, як, наприклад, польові подрібнювані або зернозбиральні комбайни, за звичай містять перевантажувальний пристрій, за допомогою якого здійснюється передача зібраної рослинної маси на транспортний засіб або у приймальний контейнер. Наприклад, протягом всього часу роботи польового подрібнювана зібрана рослинна маса постійно передається перевантажувальним пристроєм на транспортний засіб, що рухається біля подрібнювача. При цьому для забезпечення точної, без втрат, передачі зібраної маси транспортний засіб повинен пересуватися паралельно подрібнювачу або біля нього. Водій подрібнювача повинен постійно контролювати положення транспортного засобу відносно подрібнювача. При будь-яких відхиленнях положення подрібнювача відносно транспортного засобу водій повинен здійснювати ручне корегування перевантаження зібраної маси шляхом регулювання положення перевантажувального пристрою або регулювання перевантажувального дефлектора, розташованого на кінці перевантажувального пристрою. В EP 1454520 1A описаний пристрій для керування перевантажувальним пристроєм сільськогосподарської збиральної машини, причому для кращої передачі зібраної маси на транспортний засіб вказаний пристрій керування здійснює регулювання положення перевантажувального пристрою залежно від місцеположення першого об'єкта стосовно другого об'єкта, при цьому місцеположення об'єктів задається положенням перевантажувального пристрою. В результаті цього забезпечується автоматична підгонка місцеположення об'єктів відносно один одного, що звільняє водія польового подрібнювача від необхідності ручного керування другим об'єктом при регулюванні першого об'єкта для підстроювання до змінної ситуації, оскільки регулювання другого об'єкта проводиться автоматично системою керування. Недолік такої системи керування полягає у тому, що для виключення втрат зібраної маси протягом всього процесу її перевантаження оператор сільськогосподарської збиральної машини повинен здійснювати керування перевантажувальним пристроєм і одночасно узгоджувати з його положенням рух транспортного засобу . Це означає, що при дуже великому або несприятливому куті відхилення перевантажувального пристрою відносно транспортного засобу зібрана маса вивантажується мимо транспортного засобу і залишається на полі у вигляді втрат. Тому задачею винаходу є виключення недоліків відомого рівня техніки і забезпечення для оператора сільськогосподарської збиральної машини простого і вільного від втрат процесу перевантажування. Згідно з винаходом ця задача вирішується тим, що система керування перевантажуванням для керування потоком зібраної рослинної маси, що вивантажується з перевантажувального пристрою сільськогосподарської збиральної машини, причому перевантажувальний пристрій на одному кінці обладнаний дефлектором, а зібрана рослинна маса передається на транспортний засіб, причому система керування перевантажуванням включає визначення взаємного положення, керування вихідним потоком зібраної рослинної маси і систему керування направленням для водія сільськогосподарської збиральної машини в зоні транспортного засобу точка потрапляння потоку зібраної рослинної маси визначається положенням перевантажувального пристрою та положенням дефлектора, причому положення перевантажувального пристрою і положення дефлектора зада 5 ється у математичній моделі векторами (А, В, С, D, Е). Це забезпечує суттєве звільнення оператора сільськогосподарської збиральної машини від постійного контролю за процесом перевантаження протягом всього цього процесу. Крім того, забезпечується точне і з малими втратами перевантаження зібраної маси на транспортний засіб. Визначення відносного положення сільськогосподарської збиральної машини і щонайменше одного транспортного засобу забезпечує можливість точного визначення відстані, що долається, між збиральною машиною і транспортним засобом для забезпечення вільного від втрат перевантаження зібраної маси. Керування потоком маси, що вивантажується, включає узгоджене керування положенням перевантажувального пристрою і положенням перевантажувального дефлектора, що забезпечує точну координацію зміни положення перевантажувального пристрою та зміни положення перевантажувального дефлектора. Задання положення перевантажувального пристрою і перевантажувального дефлектора різними векторами дозволяє точно визначати точку потрапляння потоку зібраної маси у транспортний засіб, що забезпечує постійне і оптимальне місцезнаходження вказаної точки у транспортному засобі. Особливо переважним є переміщення точки потрапляння потоку обробленої маси у транспортний засіб по заданій траєкторії. Це забезпечує можливість надійної і вільної від втрат передачі обробленої маси на транспортний засіб. Такий вид керування точкою потрапляння потоку обробленої маси у транспортний засіб забезпечує важливу перевагу, що полягає в істотному розвантаженні оператора сільськогосподарської збиральної машини, оскільки звільняє його від постійного контролю за процесом передачі обробленої маси і, отже, дозволяє йому повністю зосередитися на керуванні збиранням рослинної маси. Розташування точки потрапляння потоку обробленої маси у транспортний засіб у віртуальній растровій сітці забезпечує особливо точну передачу обробленої маси в межах цієї сітки. При зміні умов збирання врожаю, наприклад, при використанні різного роду великих транспортних засобів, віртуальна растрова сітка у будь-який момент може бути підігнана до умов, що змінилися, шляхом зміни її розмірів та розташування. Поділ віртуальної растрової сітки за величиною на змінні віртуальні зони забезпечує особливо точне переміщення точки потрапляння потоку обробленої маси у ці зони растрової сітки. Вказане точне переміщення точки потрапляння потоку обробленої маси у транспортний засіб у межах віртуальної растрової сітки і віртуальних вікон простим способом забезпечується шляхом натискання кнопок на відомій рукоятці керування перевантажувальним пристроєм, так що настроювання певного віртуального вікна здійснюється залежно від зусиль натискання на кнопки або від кількості цих натискань. Той же самий принцип настроювання переноситься і на настройку всієї 90246 6 віртуальної растрової сітки. Особливо рівномірне заповнення транспортного засобу забезпечується при розташуванні точки потрапляння потоку обробленої маси у транспортний засіб на прямій лінії або на криволінійній траєкторії. Рівномірне заповнення транспортного засобу забезпечується при керуванні точкою потрапляння потоку обробленої маси шляхом зміни положення транспортного засобу. Особливо значне розвантаження оператора збиральної машини досягається при автоматичних хитаннях перевантажувального пристрою. Як альтернатива, оператору збиральної машини є можливість у будь-який час втрутитися в керування перевантажувальним пристроєм для його корегування. Наступні переважні форми виконання винаходу є предметом подальших залежних пунктів формули і більш детально описуються нижче на основі креслень, де на фіг. 1 показаний вигляд зверху польового подрібнювача з тягачами, що рухаються збоку і ззаду, з причіпними транспортними засобами; на фіг. 2 - функціональна схема запропонованої допоміжної перевантажувальної системи; на фіг. 3 - виконана у вигляді польового подрібнювача сільськогосподарська збиральна машина з тягачем, що рухається збоку згідно з фіг. 1. На фіг. 1 показано виконану у вигляді польового подрібнювача 1 сільськогосподарську збиральну машину 2 (вигляд зверху). Спереду до польового подрібнювача 1 приєднаний завантажувальний апарат 3, у цьому випадку - кукурудзозбиральна приставка 31, яка зрізає та приймає збирану масу 4 і подає її до не показаного подрібнювального пристрою. Потім подрібнена маса передається перевантажувальним пристроєм 5 на транспортний засіб 6, причеплений до тягача 7. В ідеальному випадку транспортний засіб переміщається біля польового подрібнювача 1 або безпосередньо за тягачем 7. Розташований за кабіною 8 оператора перевантажувальний пристрій 5 відомим способом може повертатися навколо вертикальної осі 9, а для зміни висоти його встановлення повертатися навколо горизонтальної осі 10. Крім того, забезпечується можливість керування шириною потоку зібраної маси, що викидається, за допомогою перевантажувального дефлектора 11, який підіймається та опускається. При відхиленні дефлектора 11 вгору ширина потоку маси, що викидається, збільшується, а при його відхиленні вниз - зменшується. У процесі переміщення сільськогосподарської збиральної машини 2 перед її оператором ставиться завдання рівномірного збирання рослинної маси у напрямку руху машини 2 без залишення на полі не зібраної рослинної маси і одночасно завдання забезпечення надійного та з малими втратами перевантаження обробленої маси на транспортний засіб 6. Що стосується перевантаження зібраної маси 4 на транспортний засіб 6, то для забезпечення точного визначення точки потрапляння 12 потоку зібраної маси у транспортний засіб 6 оператор збиральної машини 2 повинен пос 7 тійно контролювати зону перевантаження. Це зумовлює додаткове навантаження на оператора разом з точним дотриманням маршруту руху. Згідно з винаходом, допоміжна перевантажувальна система розвантажує оператора від такого постійного контролю, оскільки вона здійснює визначення відносного положення машин, керування потоком зібраної маси і включає систему водіння. Таким чином, точка потрапляння потоку маси, що викидається, оптимально підганяється до транспортного засобу, що дозволяє оператору збиральної машини повніше сконцентрувати свою увагу на процесі збирання рослинної маси. Визначення місцеположення виконаної у вигляді польового подрібнювача 1 збиральної машини 2 відносно переміщуваного тягачем 7 транспортного засобу 6 здійснюється з використанням відомої глобальної супутникової навігаційної системи (GPS). За допомогою цієї системи супутники 16 через рівномірні проміжки часу посилають ідентифікаційні, позиційні і часові сигнали, які приймаються встановленою на тягачі 7 супутниковою антеною 17, а також встановленою на польовому подрібнювані 1 супутниковою антеною 17. Прийом і передача супутникових сигналів обумовлюють можливість математичного визначення положення тягача 7 з причіпним транспортним пристроєм 6 відносно польового подрібнювача 1. Дані GPS, а також дані реального положення перевантажувального пристрою 5 і дефлектора 11 передаються на показаний накресленні модуль, у якому здійснюється обчислення точки 12 потрапляння потоку зібраної маси у транспортний засіб. У загальній математичній моделі на основі інформації про взаємне місцеположення подрібнювача 1 і транспортного засобу 6 розраховуються оптимальна і бажана точки 12 потрапляння зібраної маси у транспортний засіб 6. Результати цього розрахунку впливають на керування дефлектором 11 і перевантажувальним пристроєм 5, завдяки чому здійснюється керування напрямком потоку 15 обробленої маси і, отже, розрахунковою точкою потрапляння обробленої маси у транспортний засіб 6. Водій польового подрібнювача 1 у процесі пересування останнього звільняється від зайвого оперативного навантаження, особливо за рахунок переміщення вказаної точки 12 по заданій траєкторії. Ця траєкторія може бути перетворена, наприклад, у форму віртуальної растрової сітки, що охоплює всю зону польового подрібнювача 1 або її частину. Положення і розміри віртуальної растрової сітки 22 можна змінювати, причому ця сітка може розташовуватися переважно на рівні верхньої кромки бічної стінки 21 транспортного засобу 6, що забезпечує проходження потоку 15 обробленої маси по дуже низькій траєкторії і, отже, відбиття цього потоку від стінки 21 транспортного засобу 6 з виключенням розсипання обробленої маси на грунт у вигляді втрат. Переважним є поділ віртуальної растрової сітки 22 на декілька віртуальних зон 23. Можливість настроювання віртуальної растрової сітки 22 або її віртуальних зон 23 дозволяє водію польового под 90246 8 рібнювача 1 переміщати потік 15 обробленої маси точно в межах цієї сітки або її зон. Використовуючи розташовану у кабіні 8 багатофункціональну рукоятку 24, водій польового подрібнювача 1 може змінювати положення перевантажувального пристрою 5 і дефлектора 11 і, отже, змінювати напрямок потоку 15 обробленої маси, що забезпечує можливість настроювання віртуальної растрової сітки 22 та її віртуальних зон 23. Це керування здійснюється залежно від дії на багатофункціональну рукоятку 24, тобто залежно від приведення в дію виконавчих елементів 26, 27, 28, 29, розміщених на цій рукоятці. При. цьому можливі напрямки руху перевантажувального пристрою 5, вказані на виконавчих елементах 26, 27, 28, 29 багатофункціональної рукоятки 24, визначаються встановленням однієї із заданих віртуальних зон 23. В основному прикладі здійснення винаходу це означає, що точка 121 потрапляння обробленої маси у транспортний засіб 6 незмінно залишається у нульовому положенні. При приведенні в дію виконавчого елемента 26 точка 121 переміщається у напрямку руху FR з віртуальної зони 23 на віртуальну зону 30. При приведенні в дію виконавчого елемента 27 точка 121, виходячи з вищеназваного нульового положення, переміщається проти напрямку руху FR з віртуальної зони 23 на віртуальну зону 31. Якщо водій польового подрібнювача 1 натискує виконавчий елемент 28, точка 121 зміщується, виходячи з нульового положення, з віртуальної зони 23 ліворуч на віртуальну зону 32, а при приведенні в дію виконавчого елемента 29 вона зміщується з віртуальної зони 23 праворуч на віртуальну зону 33. Не виходить за рамки винаходу можливість послідовного проходження декількох віртуальних зон 23 шляхом приведення в дію відповідних виконавчих елементів 26, 27, 28, 29, завдяки чому водій польового подрібнювача 1 досягає швидкого і точного встановлення перевантажувального пристрою 5 та точного заповнення транспортного засобу 6. У процесі збирання відбувається зміщення точки 121 потрапляння обробленої маси виключно всередині стінок 20, 21 транспортного засобу 6, що забезпечує оптимальний і вільний від втрат процес перевантаження обробленої маси 4 у транспортний засіб 6. Вищеназване керування точкою 12 потрапляння обробленої маси у транспортний засіб 6 і, отже, перевантаженням обробленої маси може відповідним чином використовуватися при будьякому положенні транспортного засобу 6 відносно сільськогосподарської збиральної машини 2. Замість зміщення точки 12 потрапляння обробленої маси в межах віртуальної растрової сітки 22 або віртуальних зон 23 можна здійснювати зміщення точки 12 до точки 1211 по прямій. При цьому таке зміщення здійснюється шляхом приведення в дію виконавчого елемента 26. У цьому випадку величина зміщення 25 точки 12 по прямій визначається тривалістю натискання виконавчого елемента 26. Що стосується інших виконавчих елементів 27, 28, 29, то для них є дійсним вищесказане. 9 Можливість зміни розмірів віртуальних зон 23 надає водію польового подрібнювача 1 можливість вибору або швидкого регулювання з використанням зони 23 великих розмірів або точного і повільного регулювання з використанням зони 23 малих розмірів. У загальному випадку перевантаження обробленої маси 4 задається положенням і розмірами віртуальної растрової сітки 22, а також розмірами і положенням віртуальних зон 23, внаслідок чого діапазон хитань перевантажувального пристрою 5 визначається розмірами і положенням віртуальної растрової сітки 22 та віртуальних зон 23. На фіг. 2 показана функціональна схема допоміжної перевантажувальної системи. Як вже було описано з посиланнями на фіг. 1, сигнали GPS положення польового подрібнювача 1 стосовно тягача 7 з причіпним транспортним засобом 6 передаються на обчислювальний блок 19, який виконаний у вигляді модуля. У блок 18 вводу даних оператор збиральної машини 2 може вводити граничні параметри, що впливають на вільне від втрат перевантаження обробленої маси на транспортній засіб 6. Такими параметрами є, наприклад, розміри і розташування даху кабіни збиральної машини 2 або висота стінок 20, 21 транспортного засобу 6, оскільки вони є суттєвими чинниками, що впливають на перевантаження обробленої маси. Наприклад, розміри і розташування даху кабіни самохідного польового подрібнювача 1 обмежують амплітуду хитань перевантажувального пристрою 5 у передній зоні польового подрібнювача 1, оскільки при великій амплітуді хитань перевантажувального пристрою 5 у напрямку FR руху машини він може наштовхнутися на дах кабіни. Висота ж стінок 20, 21 транспортного засобу 6 визначає мінімальну висоту, при якій потік обробленої маси може передаватися на транспортний засіб 6. Слід звернути увагу на те, що вказані граничні параметри не обмежують обсяг винаходу, але скоріше його розширюють. Введені граничні параметри передаються потім в обчислювальний блок 19 і враховуються разом з супутниковими сигналами при розрахунку положень точки 12 потрапляння обробленої маси у транспортний засіб. Положення точки 12 визначається залежно від прийнятих сигналів глобальної супутникової навігаційної системи і сигналів граничних параметрів на основі математичної моделі, яку одержують на основі показаних на фіг. 3 векторів А, В, С, D, E у вигляді суми векторів А, В, C або суми векторів D, Е. За результатами цих розрахунків генерується сигнал для перевантажувального пристрою 5 і дефлектора 11. Залежно від цього сигналу відбувається регулювання перевантажувального пристрою 5 і дефлектора 11, в результаті чого положення перевантажувального пристрою і положення дефлектора 11 задають положення точки 12 потрапляння обробленої маси у транспортному засобі 6 і забезпечують вільну від втрат передачу обробленої маси із звільненням оператора збиральної машини 2 від складних операцій. На фіг. 3 для більш зрозумілого відображення 90246 10 винаходу показані польовий подрібнювач 1 і тягач 7, що пересувається поряд з ним, з причіпним транспортним засобом 6. Взаємне положення польового подрібнювача 1 і транспортного засобу 6 визначається за допомогою відомої глобальної супутникової навігаційної системи GPS і використовується як задавальний параметр для визначення положення точки 12 потрапляння обробленої маси 4 у транспортний засіб 6, а також для проведення вектора (Z) цільової точки подрібнювача 1 до початкової точки, тобто до точки 12. Керування виходом обробленої у подрібнювані рослинної маси здійснюється відомим способом шляхом поворотів перевантажувального пристрою 5 і поворотів дефлектора 11, причому положення перевантажувального пристрою 5 можна змінювати, наприклад, з використанням не показаного поворотного круга з горизонтальною віссю 10 і також не показаного циліндро-поршневого механізму з вертикальною віссю 9. Зміною положення дефлектора 11 можна змінювати ширину викиду обробленої маси 4. При цьому переміщення дефлектора 11 вгору і вниз пов'язане з горизонтальним і вертикальним переміщенням перевантажувального пристрою 5, тобто при опусканні перевантажувального пристрою 5 дефлектор 11 відхиляється на заданий кут вгору, завдяки чому точка перевантаження 12 постійно знаходиться на прямому відрізку 25. Водій подрібнювача 1 може спостерігати положення подрібнювача 1 відносно транспортного засобу 6, що відповідає реальному процесу перевантаження, на розташованому у кабіні 8 оптичному індикаторному пристрої 13 системи водіння. Індикація реального взаємного положення вказаних машин особливо важлива при їх русі по критичних кривих, оскільки на таких криволінійних ділянках траєкторії руху не можливе повністю вільне від втрат перевантаження обробленої маси 4 через обмеження кабіною 8 діапазону хитань перевантажувального пристрою 6. Для забезпечення оптимального і вільного від перешкод перевантаження обробленої маси 4 на транспортний засіб 6 положення перевантажувального пристрою 5 і положення дефлектора 11 визначаються математичною моделлю через різні вектори А, В, С, D, Е. Визначення векторів А, В, С, D, E здійснюється для визначення вектора Z цільової точки. Вектор Z встановлює оптимальну точку 12 потрапляння обробленої маси у порожнину перевантажувального пристрою 6. Вектор Z можна визначати різними шляхами. Один з них передбачає спільний розрахунок вертикального вектора А, вектора В перевантажувального пристрою і вектора C потоку обробленої маси, причому вертикальний вектор А проходить паралельно вертикальній осі 14 транспортного засобу 6. Вектор В перевантажувального пристрою визначається горизонтальним і вертикальним положенням перевантажувального пристрою 6, а вектор C потоку обробленої маси - напрямком викиду обробленої маси 4, що виходить з перевантажувального пристрою 5. Сума трьох векторів А, 11 В, C дає вектор Z цільової точки. Шляхом визначення вектора Z цільової точки задається точка 12 потрапляння потоку обробленої маси у порожнину транспортного засобу 6. Альтернативою розрахунку точки 12 потрапляння потоку 15 обробленої маси у порожнину транспортного засобу 6 через вектори А, В, C є визначення точки 12 через вектор D відносного місцеположення машин та вектор E точки завантаження збираної маси. Вектор D описує положення польового подрібнювача 1 відносно транспортного засобу 6. Вектор E описує точку потрапляння обробленої маси 4 у порожнину транспортного засобу 6. Сума векторів D і E дає вектор Z цільової точки, завдяки чому забезпечується можливість задания точки 12. Оскільки при русі подрібнювача 1 і транспортного засобу 6 у процесі збирання оброблена у подрібнювані маса різним чином розподіляється у транспортному засобі 6, а її кількість дуже змінюється, то переважним є забезпечення регулювання положення точки 12. Це дозволяє оператору збиральної машини 2 точно керувати потоком обробленої маси шляхом встановлення точки 12 потрапляння потоку обробленої маси у порожнину транспортного засобу і здійснювати точне заповнення цією масою транспортного засобу. Оскільки положення збиральної машини 2 відносно транспортного засобу 6, як правило, змінюється, що обумовлене, наприклад, різними швидкостями руху збиральної машини 2 і тягача 7 або ж ступенем точності керування їх рухом, то переважним є забезпечення варіювання вектора Z. Це означає, що зміна розрахункових величин векторів А, В, С, D або E не справляє ніякого впливу на точність передачі обробленої маси, оскільки зміна величин цих векторів безпосередньо враховується при розрахунку вектора Z цільової точки, в результаті чого здійснюється нове встановлення і актуалізація точки 12 потрапляння потоку 15 обробленої маси у транспортний засіб, завдяки чому оброблена маса без втрат передається із збиральної машини на транспортний засіб. Точка 12 потрапляння потоку 15 обробленої маси у порожнину транспортного засобу переважно знаходиться на прямій, показаній на фіг. 1. Розташування точки 12 на прямій, яка в ідеальному випадку проходить посередині транспортного засобу 6, забезпечує особливо рівномірну передачу обробленої маси 4 на транспортний засіб 6 і, отже, забезпечує можливість розширення насипного конуса маси, що передається, тільки у самій порожнині транспортного засобу 6. Не виходить за рамки винаходу можливість розташування точки 12 на криволінійній траєкторії (не показаній у даному описі), в результаті чого потік 15 обробленої маси проходить, наприклад, у поздовжньому напрямку транспортного засобу 6 від його внутрішньої стінки 20 до протилежної внутрішньої стінки 21. Це забезпечує найбільш рівномірне заповнення транспортного засобу 6, оскільки потік 15 обробленої маси охоплює порожнину транспортного засобу 6 по всій її ширині та довжині. І, зрештою, існує можливість регулювання положення точки 12 з транспортного засобу 6 або 90246 12 його тягача 7. Згідно з такою формою здійснення винаходу, положення перевантажувального пристрою 5 підтримується постійним, а положення транспортного засобу 6 варіюється залежно від реального ступеня його заповнення обробленою масою. Для підтримання узгодженого положення перевантажувального пристрою 5 і транспортного засобу 6 система керування тягачем указує його водію положення збиральної машини 2 відносно транспортного засобу 6, що дозволяє водію тягача шляхом простого відхилення рульового керування оптимальним чином вирівнювати транспортний засіб 6 відносно перевантажувального пристрою 5. Як було згадано раніше, до обов'язку оператора подрібнювача 1 входить здійснення ручного керування перевантажувальним пристроєм 5 або ж автоматичного керування ним відповідно до заданого циклу регулювання. Не виходить за рамки винаходу здатність фахівця у даній галузі техніки іншим чином перетворити описаний приклад здійснення винаходу або використати винахід в інших машинах з досягненням показаних у цьому описі ефектів без виходу за рамки винаходу. Перелік позицій елементів на кресленнях 1 - самохідний польовий подрібнювач 2 - збиральна машина 3 - завантажувальний апарат 31 - кукурудзозбиральна приставка 4 - зібрана рослинна маса 5 - перевантажувальний пристрій 6 - транспортний засіб 7 - тягач 8 - кабіна оператора 9 - вертикальна вісь повороту перевантажувального пристрою 10 - горизонтальна вісь повороту перевантажувального пристрою 11 - дефлектор на кінці перевантажувального пристрою 12 - точка потрапляння обробленої маси у транспортний засіб 13 - індикаторний пристрій 14 - вертикальна вісь транспортного засобу 15 - потік зібраної рослинної маси 16 - супутник глобальної супутникової навігаційної системи 17 - антена глобальної супутникової навігаційної системи 18 - блок вводу даних 19 - обчислювальний блок 20 - внутрішня стінка транспортного засобу 21 - внутрішня стінка транспортного засобу 22 - віртуальна-растрова сітка 23 - віртуальна зона растрової сітки 24 - багатофункціональна рукоятка А - вертикальний вектор В - вектор перевантажувального пристрою C - вектор потоку обробленої маси D - вектор відносного положення машини E - вектор точки завантаження Z - вектор цільової точки FR - напрямок руху 25 - відрізок шляху 26 - виконавчий елемент 13 27 - виконавчий елемент 28 - виконавчий елемент 29 - виконавчий елемент 30 - віртуальна зона растрової сітки 31 - віртуальна зона растрової сітки 32 - віртуальна зона растрової сітки 90246 14 33 - віртуальна зона растрової сітки 12’ - точка потрапляння обробленої маси у транспортний засіб 12’’ - точка потрапляння обробленої маси у транспортний засіб 15 90246 16 17 Комп’ютерна верстка А. Крулевський 90246 Підписне 18 Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюSystem to control reloading harvested mass in farm harvesting machine
Автори англійськоюHuster Jochen, HARTMANN RALF, Diekhans Norbert
Назва патенту російськоюСистема управления перегрузкой убранной массы в сельскохозяйственной уборочной машине
Автори російськоюХустер Йохен, Хартманн Ральф, Дикханс Норберт
МПК / Мітки
МПК: A01B 69/00, A01D 43/00, A01D 41/00
Мітки: маси, перевантажуванням, зібраної, збиральний, система, керування, машини, сільськогосподарський
Код посилання
<a href="https://ua.patents.su/9-90246-sistema-keruvannya-perevantazhuvannyam-zibrano-masi-u-silskogospodarskijj-zbiralnijj-mashini.html" target="_blank" rel="follow" title="База патентів України">Система керування перевантажуванням зібраної маси у сільськогосподарській збиральній машині</a>
Спосіб автоматичного керування процесом темперування шоколадної маси у темперуючій машині
Номер патенту: 36686
Опубліковано: 10.11.2008
Автори: Лаврінєнко Андрій Сергійович, Муратов Віктор Георгійович
МПК: A23G 1/00
Мітки: темперування, машини, спосіб, процесом, автоматичного, шоколадної, маси, темперуючий, керування
Формула / Реферат:
Спосіб автоматичного керування процесом темперування шоколадної маси у темперуючій машині, що включає вимірювання температури шоколадної маси в кожній зоні темперування, регулювання температури шоколадної маси у кожній зоні темперування, який відрізняється тим, що додатково вимірюють положення регулюючих органів подачі гарячої води, вимірюють витрату гарячої води у першій зоні темперування і враховують цей сигнал в керуючій дії залежного...
Спосіб автоматичного керування процесом темперування шоколадної маси у темперуючій машині
Номер патенту: 45120
Опубліковано: 26.10.2009
Автор: Венгерчук Андрій Володимирович
МПК: A23G 1/04
Мітки: процесом, керування, автоматичного, темперування, машини, шоколадної, спосіб, маси, темперуючий
Формула / Реферат:
Спосіб автоматичного керування процесом темперування шоколадної маси, в якому вимірюють та регулюють температуру шоколадної маси в кожній зоні темперування, який відрізняється тим, що додатково підвищують динамічну точність системи керування за каналами регулювання за допомогою упровадження в систему автоматичного регулювання "упереджувача Сміта", що забезпечує максимальний запас стійкості.
Спосіб автоматичного керування процесом збивання помадної маси в помадозбивній машині
Номер патенту: 41552
Опубліковано: 25.05.2009
Автори: Полякова Євгенія Володимирівна, Муратов Віктор Георгійович
МПК: A23G 3/02
Мітки: помадозбивній, процесом, збивання, автоматичного, помадної, маси, керування, машини, спосіб
Формула / Реферат:
Спосіб автоматичного керування процесом збивання помадної маси у помадозбивній машині, що включає вимірювання і регулювання температури помадної маси в кожній секції збивання помадозбивної машини шляхом зміни витрати холодної води крізь теплообмінники цих секцій, який відрізняється тим, що вимірюють і регулюють температуру теплоносія на виході теплообмінника ротора помадозбивної машини шляхом зміни витрати цього теплоносія крізь вказаний...
Вимірювальний пристрій на пересувній збиральній машині
Номер патенту: 47482
Опубліковано: 15.07.2002
Автор: Норберт Дікханс
МПК: A01D 75/00, A01D 41/12
Мітки: збиральний, машини, вимірювальний, пересувний, пристрій
Формула / Реферат:
1. Вимірювальний пристрій на пересувній збиральній машині, зокрема на польовому подрібнювачі, для визначення параметрів зібраного матеріалу і/або специфічних параметрів його подачі, причому збиральна машина містить передній навісний пристрій для приймання зібраного матеріалу і щонайменше один обробний агрегат для обробки зібраного матеріалу, який відрізняється тим, що в збиральній машині встановлений щонайменше один вимірювальний пристрій на...
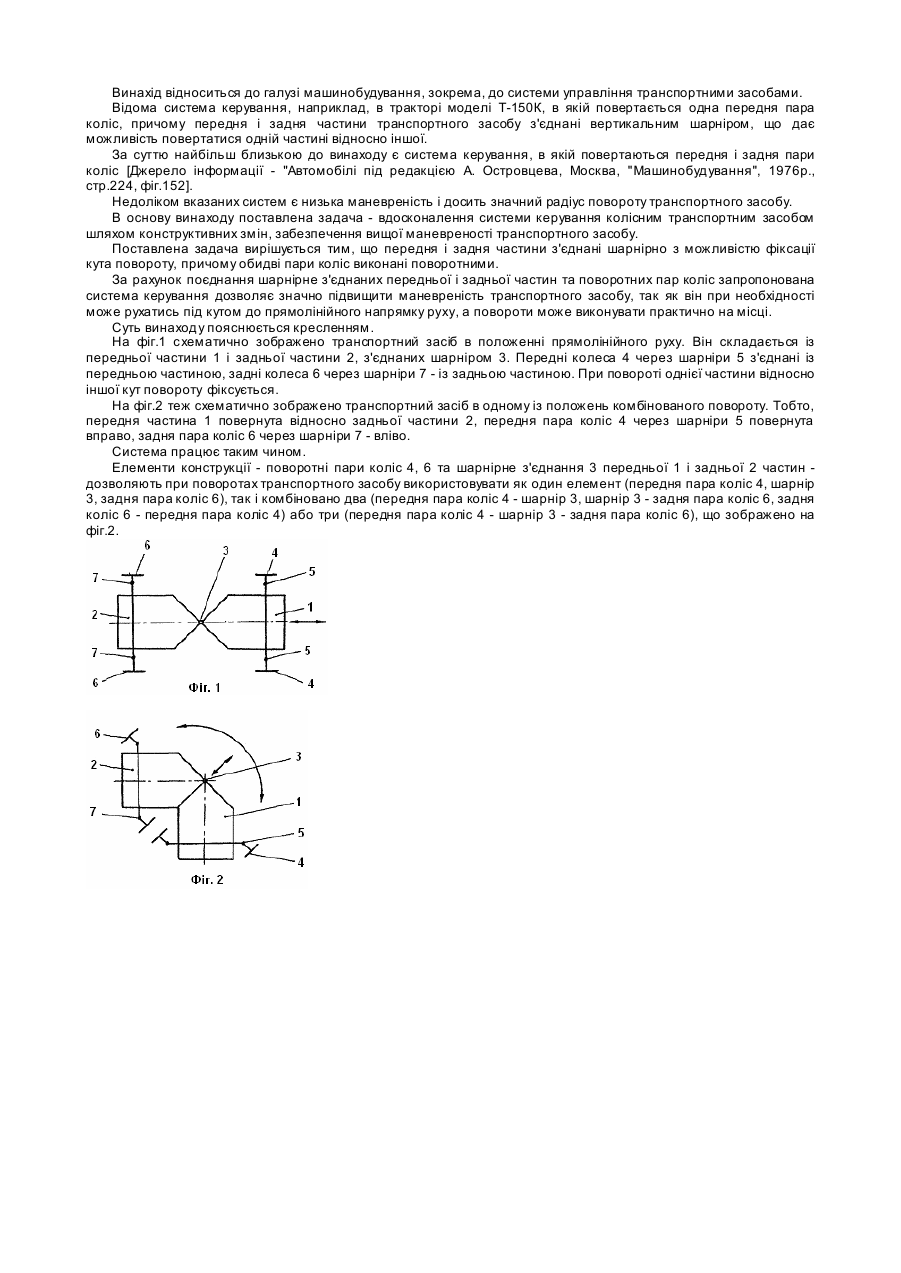
Система керування колісним транспортним засобом
Номер патенту: 67344
Опубліковано: 15.06.2004
Автор: Мендела Олег Богданович
МПК: B60W 10/00
Мітки: керування, колісним, транспортним, засобом, система
Формула / Реферат:
Система керування колісним транспортним засобом, що містить передню і задню частини з парами коліс, яка відрізняється тим, що передня і задня частини з'єднані шарнірно з можливістю фіксації кута повороту, причому обидві пари коліс виконані поворотними.
Попередній патент: Пристрій для пропарювання плити із деревного волокна та його застосування для попереднього пропарювання при виготовленні плити
Наступний патент: Гідрофобний композит та спосіб його виготовлення
Випадковий патент: Спосіб встановлення стельової підвісної системи