Спосіб ідентифікації індивідуальної функції перетворення багатопараметричного сенсора
Номер патенту: 103802
Опубліковано: 25.11.2013
Автори: Саченко Анатолій Олексійович, Кочан Володимир Володимирович, Рощупкін Олексій Юрійович
Формула / Реферат
1. Спосіб ідентифікації індивідуальної функції перетворення багатопараметричного сенсора за результатами його повірки, при якому результати повірки у точках, де повірка не проводилась, прогнозують шляхом обробки дійсних результатів повірки, який відрізняється тим, що прогноз результатів повірки в точках, де повірка не проводилась, проводять за допомогою набору нейронних мереж, навчених на результатах попередньої повірки групи однотипних багатопараметричних сенсорів у кількості точок, достатній для ідентифікації індивідуальної функції перетворення багатопараметричних сенсорів цього типу із заданою точністю, причому для прогнозу результатів повірки в кожній точці використовують окрему нейронну мережу, навчену на результатах повірки, при яких значення фізичних величин належать заданому набору точок повірки відносно точки, результати повірки якої прогнозуються.
2. Спосіб ідентифікації індивідуальної функції перетворення багатопараметричного сенсора за п. 1, який відрізняється тим, що прогноз результатів повірки даного сенсора в кожній точці, де повірка не проводилась, ведуть окремо для всіх прямих, які можна провести через цю і сусідні точки дійсної повірки.
3. Спосіб ідентифікації індивідуальної функції перетворення багатопараметричного сенсора за п. 1, який відрізняється тим, що прогноз результатів повірки даного сенсора в кожній точці, де повірка не проводилась, ведуть окремо для груп точок повірки, прилеглих до точки, де повірка не проводилась.
4. Спосіб ідентифікації індивідуальної функції перетворення багатопараметричного сенсора за п. 1, який відрізняється тим, що окремі прогнози результатів повірки даного сенсора в кожній точці, де повірка не проводилась, об'єднують за допомогою нейронних мереж, навчених на результатах повірки групи однотипних сенсорів для того ж самого заданого набору точок повірки.
5. Спосіб ідентифікації індивідуальної функції перетворення багатопараметричного сенсора за будь-яким з пп. 2-4, який відрізняється тим, що при навчанні відповідних нейронних мереж, кожен вхідний вектор навчання формують спочатку як набір значень результатів повірки сенсора, що імітує сенсор який повіряють, далі значень результатів повірки найбільш подібного сенсора серед групи однотипних багатопараметричних сенсорів, далі значень результатів повірки наступного за подібністю сенсора аж до найменш подібного сенсора, а вихідний - як результат повірки сенсора, що імітує сенсор, який повіряють, в точці, де результат повірки прогнозується, причому подібність визначається за мінімумом суми абсолютних значень відхилень результатів повірки сенсора серед групи однотипних багатопараметричних сенсорів від результатів повірки сенсора, що імітує сенсор, який повіряють, в точках дійсної повірки.
6. Спосіб ідентифікації індивідуальної функції перетворення багатопараметричного сенсора за п. 5, який відрізняється тим, що при прогнозі окремих результатів повірки сенсора, який дійсно повіряють, вхідний вектор кожної нейронної мережі формують як набір значень результатів повірки сенсора, який дійсно повіряють, далі значень результатів повірки найбільш подібного сенсора серед групи однотипних багатопараметричних сенсорів, далі значень результатів повірки наступного за подібністю сенсора аж до сенсора, який передує найменш подібному сенсору, причому значення результатів повірки найменш подібного сенсора відкидають.
Текст
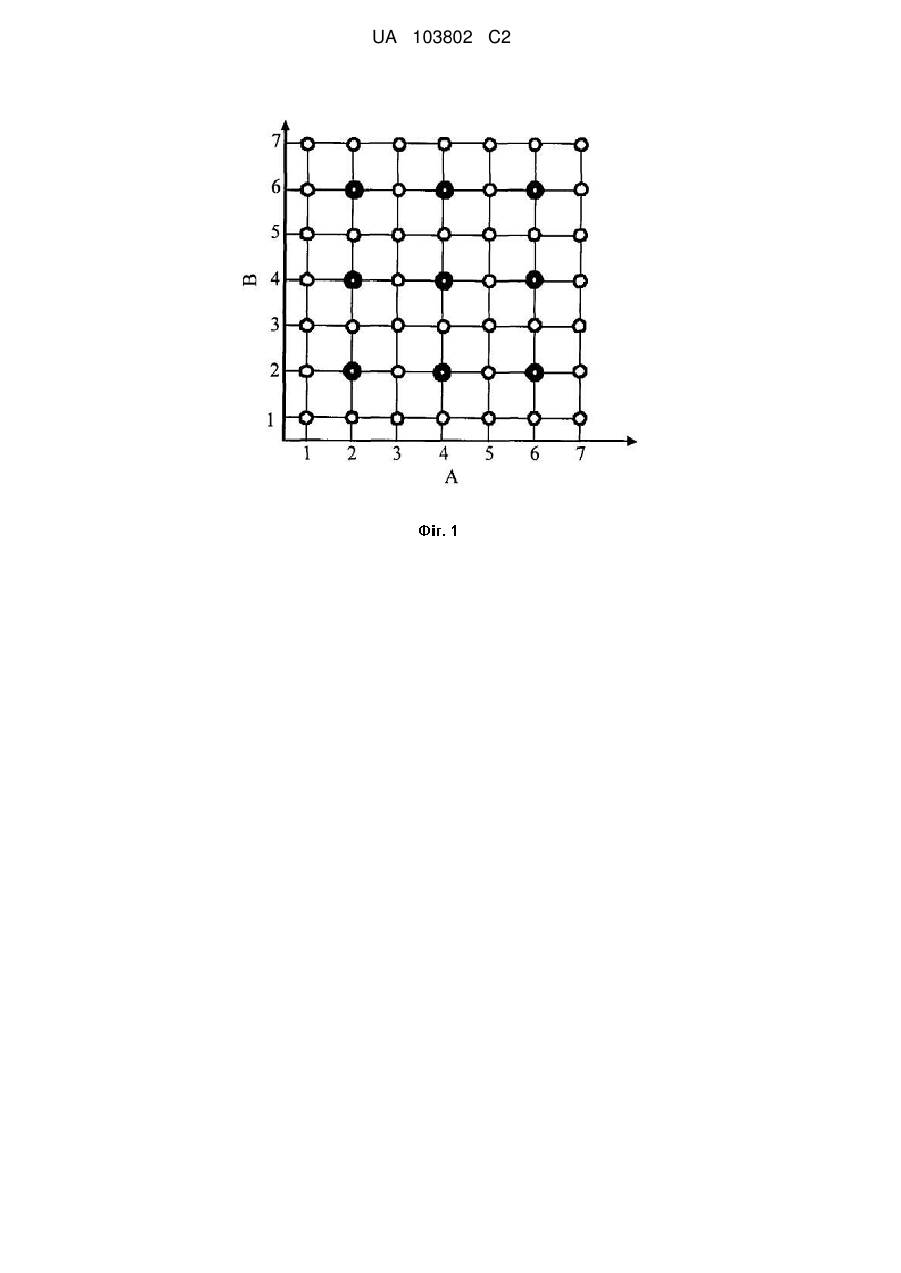
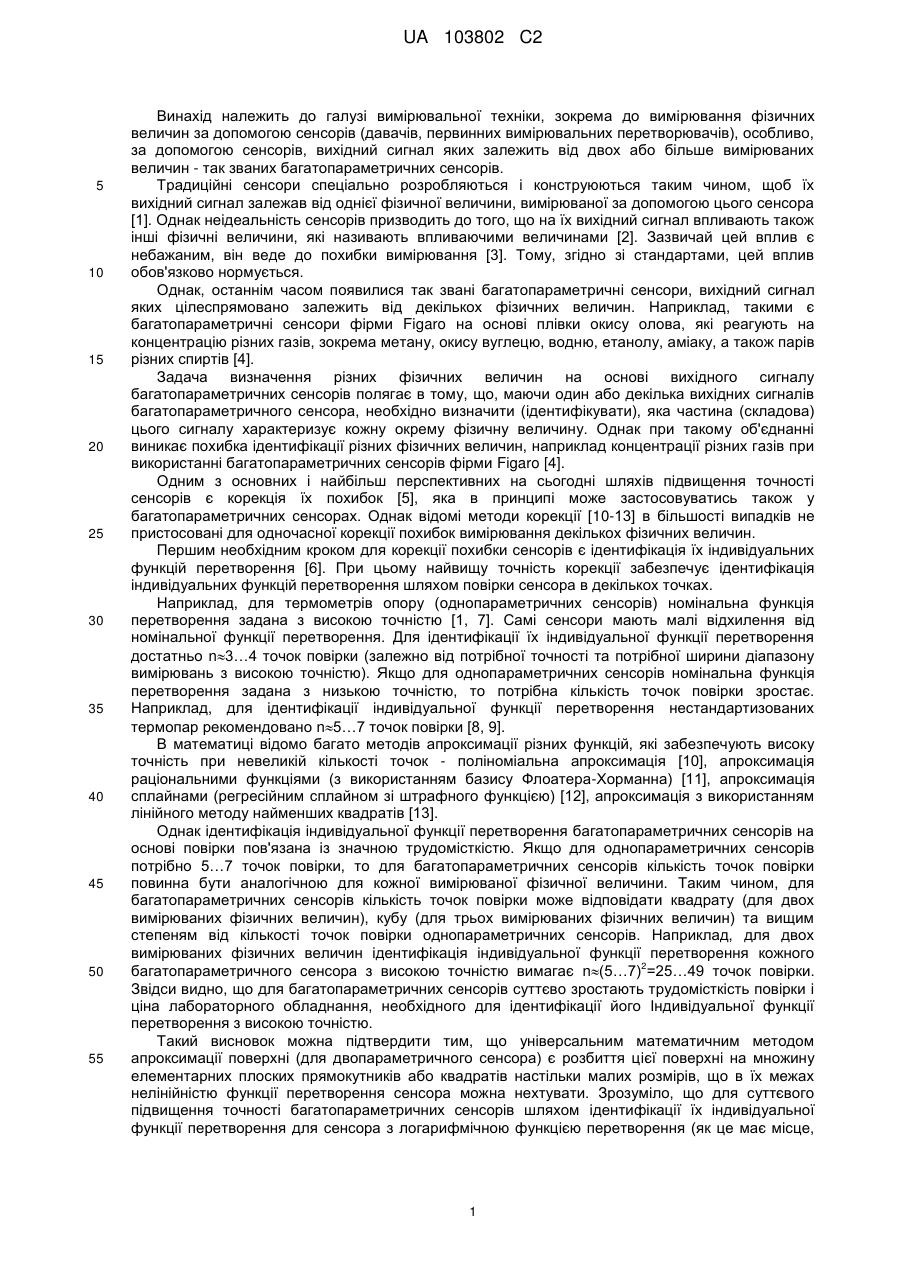
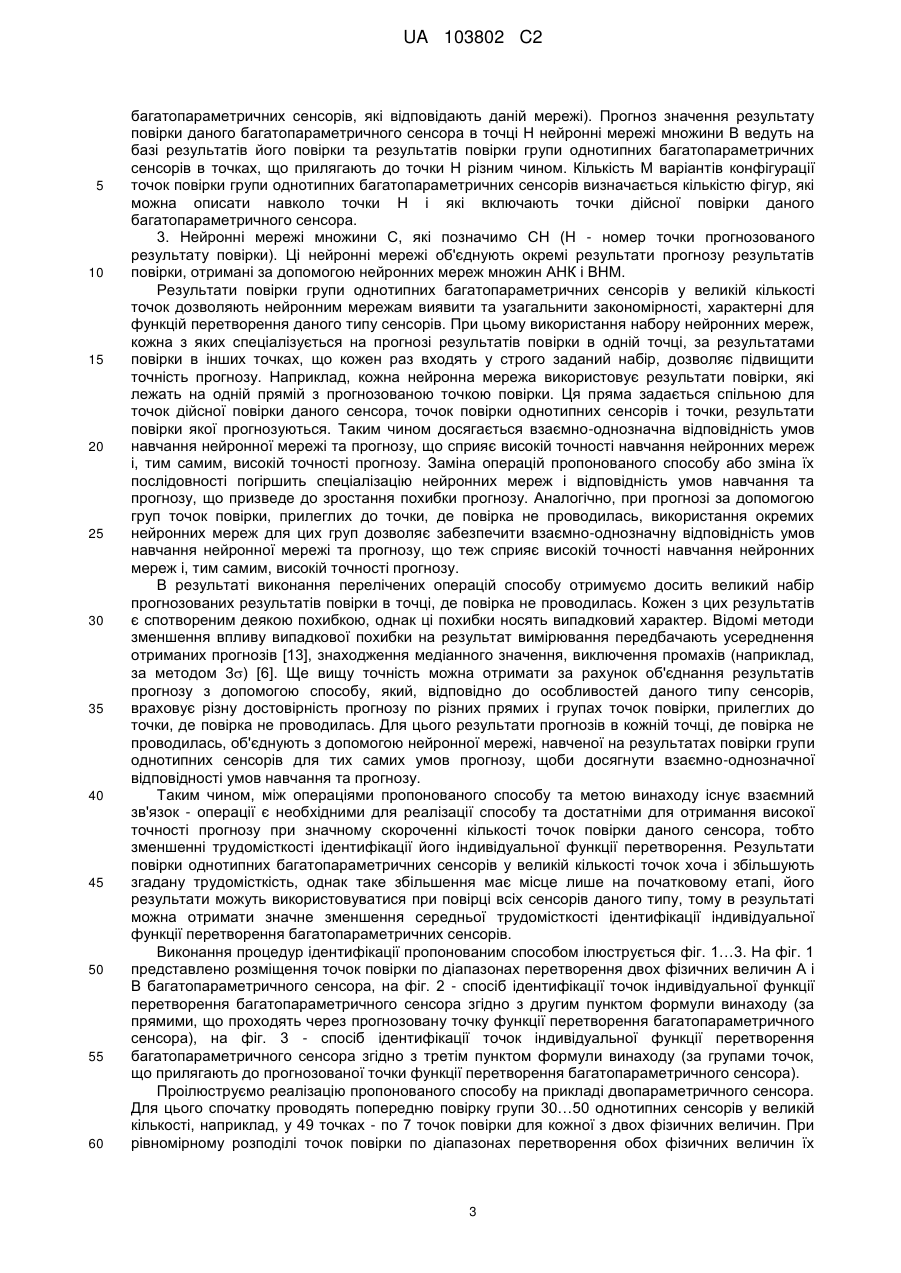
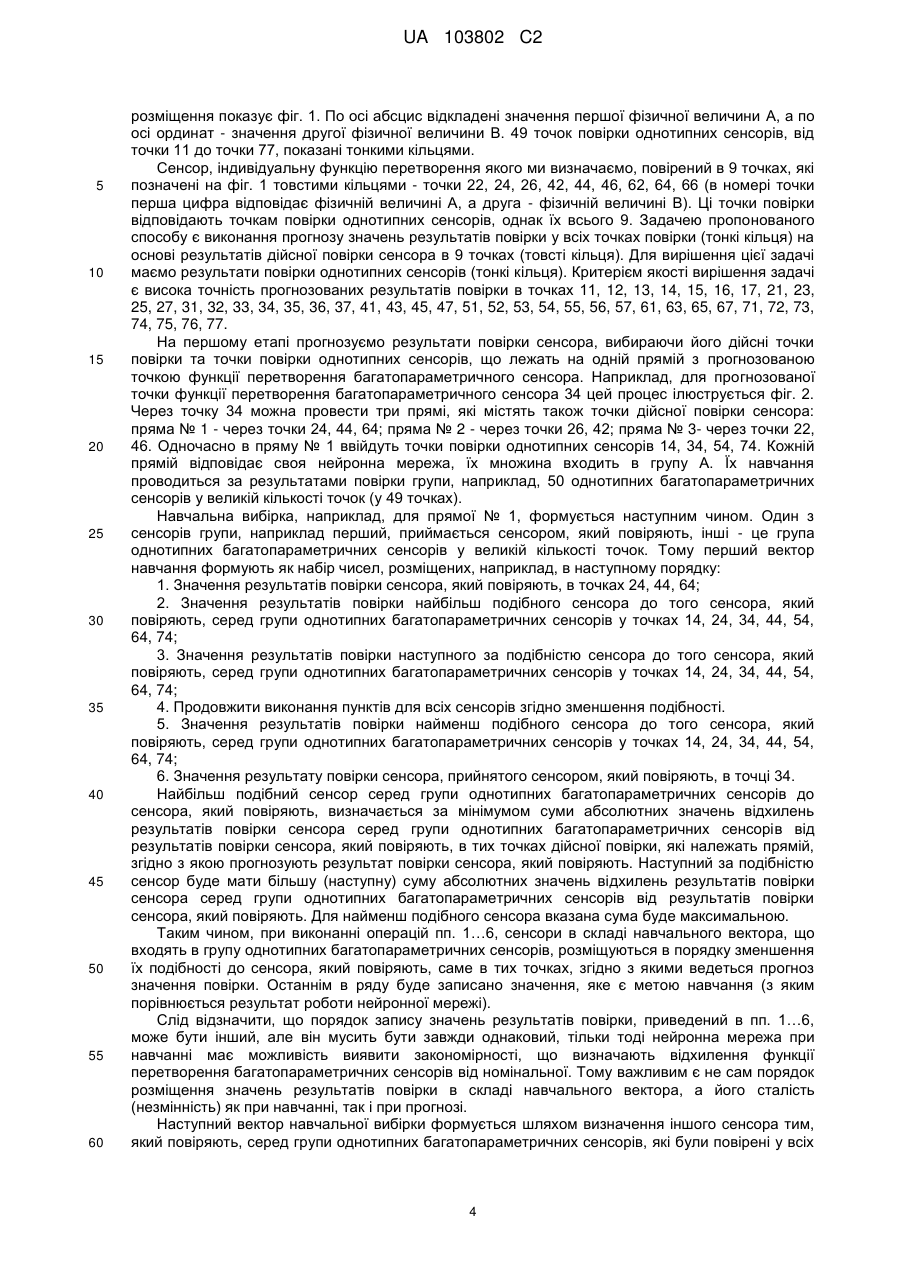
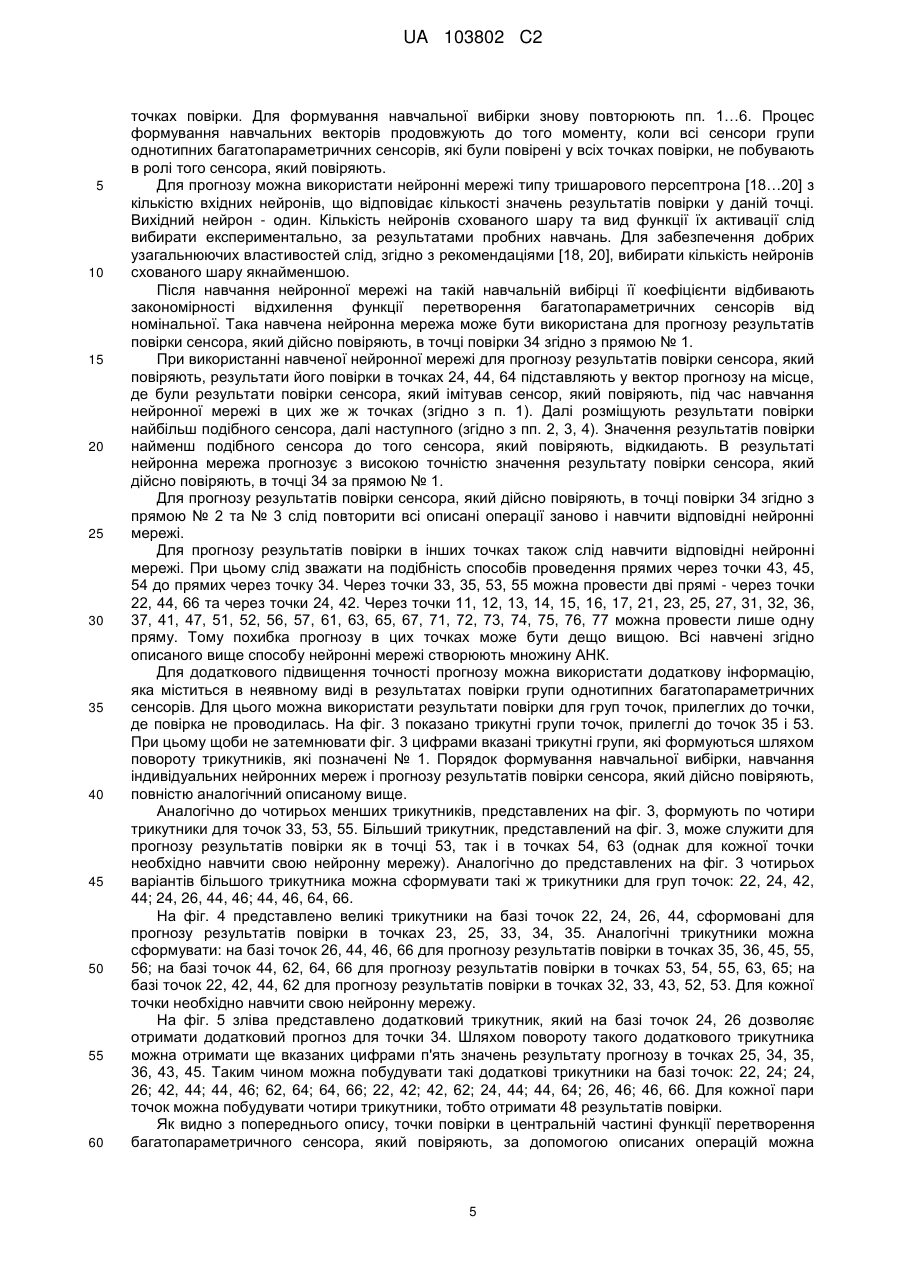
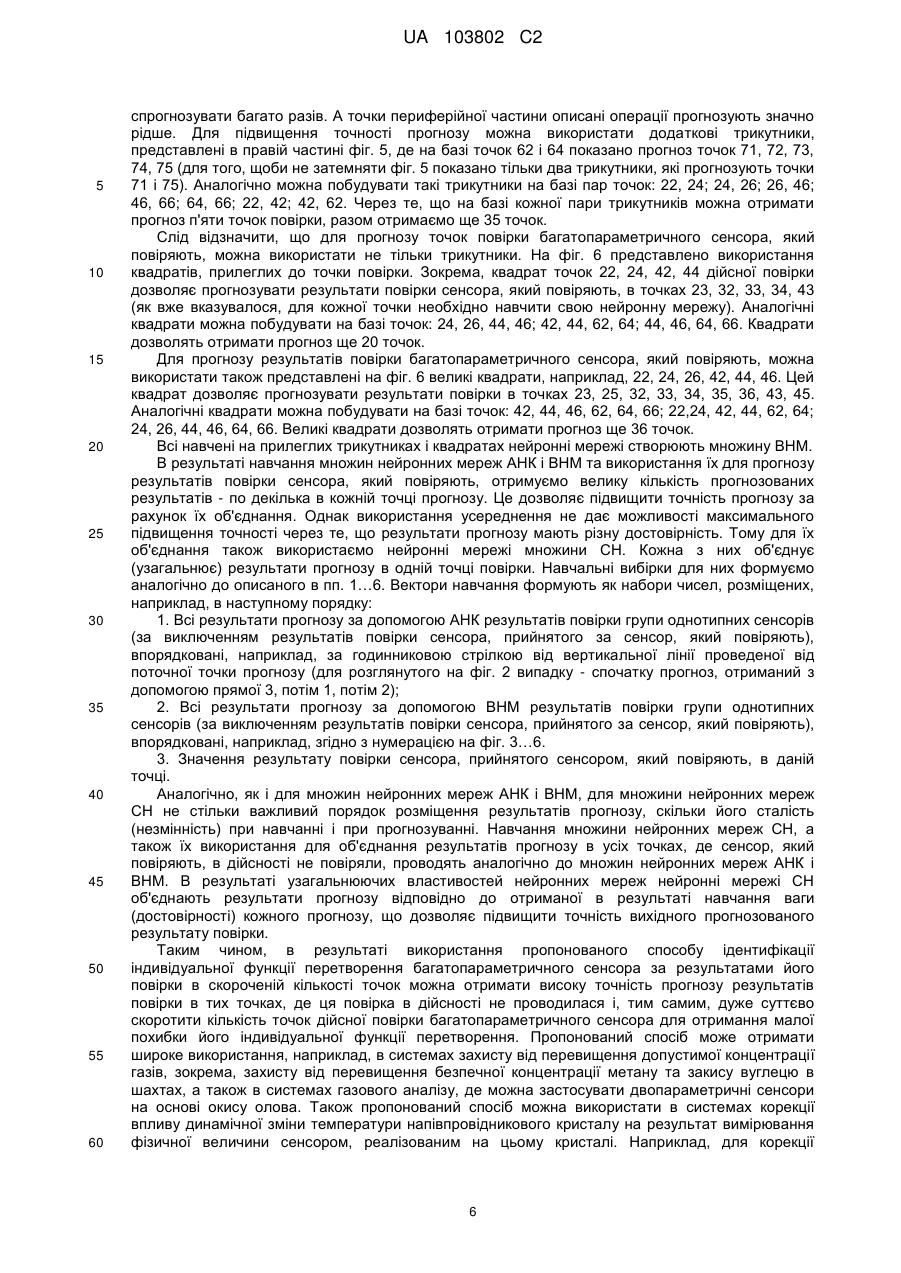
Реферат: Винахід належить до галузі вимірювальної техніки, зокрема до вимірювання фізичних величин за допомогою сенсорів, особливо сенсорів, вихідний сигнал яких залежить від двох або більше вимірюваних величин - так званих багатопараметричних сенсорів. Спосіб ідентифікації індивідуальної функції перетворення багатопараметричного сенсора за результатами його повірки, при якому результати повірки у точках, де повірка не проводилась, прогнозують шляхом обробки дійсних результатів повірки, який проводять за допомогою набору нейронних мереж, навчених на результатах попередньої повірки групи однотипних багатопараметричних сенсорів у кількості точок, достатній для ідентифікації індивідуальної функції перетворення багатопараметричних сенсорів цього типу із заданою точністю. Технічним результатом є в скорочення кількості точок повірки. UA 103802 C2 (12) UA 103802 C2 UA 103802 C2 5 10 15 20 25 30 35 40 45 50 55 Винахід належить до галузі вимірювальної техніки, зокрема до вимірювання фізичних величин за допомогою сенсорів (давачів, первинних вимірювальних перетворювачів), особливо, за допомогою сенсорів, вихідний сигнал яких залежить від двох або більше вимірюваних величин - так званих багатопараметричних сенсорів. Традиційні сенсори спеціально розробляються і конструюються таким чином, щоб їх вихідний сигнал залежав від однієї фізичної величини, вимірюваної за допомогою цього сенсора [1]. Однак неідеальність сенсорів призводить до того, що на їх вихідний сигнал впливають також інші фізичні величини, які називають впливаючими величинами [2]. Зазвичай цей вплив є небажаним, він веде до похибки вимірювання [3]. Тому, згідно зі стандартами, цей вплив обов'язково нормується. Однак, останнім часом появилися так звані багатопараметричні сенсори, вихідний сигнал яких цілеспрямовано залежить від декількох фізичних величин. Наприклад, такими є багатопараметричні сенсори фірми Figaro на основі плівки окису олова, які реагують на концентрацію різних газів, зокрема метану, окису вуглецю, водню, етанолу, аміаку, а також парів різних спиртів [4]. Задача визначення різних фізичних величин на основі вихідного сигналу багатопараметричних сенсорів полягає в тому, що, маючи один або декілька вихідних сигналів багатопараметричного сенсора, необхідно визначити (ідентифікувати), яка частина (складова) цього сигналу характеризує кожну окрему фізичну величину. Однак при такому об'єднанні виникає похибка ідентифікації різних фізичних величин, наприклад концентрації різних газів при використанні багатопараметричних сенсорів фірми Figaro [4]. Одним з основних і найбільш перспективних на сьогодні шляхів підвищення точності сенсорів є корекція їх похибок [5], яка в принципі може застосовуватись також у багатопараметричних сенсорах. Однак відомі методи корекції [10-13] в більшості випадків не пристосовані для одночасної корекції похибок вимірювання декількох фізичних величин. Першим необхідним кроком для корекції похибки сенсорів є ідентифікація їх індивідуальних функцій перетворення [6]. При цьому найвищу точність корекції забезпечує ідентифікація індивідуальних функцій перетворення шляхом повірки сенсора в декількох точках. Наприклад, для термометрів опору (однопараметричних сенсорів) номінальна функція перетворення задана з високою точністю [1, 7]. Самі сенсори мають малі відхилення від номінальної функції перетворення. Для ідентифікації їх індивідуальної функції перетворення достатньо n3…4 точок повірки (залежно від потрібної точності та потрібної ширини діапазону вимірювань з високою точністю). Якщо для однопараметричних сенсорів номінальна функція перетворення задана з низькою точністю, то потрібна кількість точок повірки зростає. Наприклад, для ідентифікації індивідуальної функції перетворення нестандартизованих термопар рекомендовано n5…7 точок повірки [8, 9]. В математиці відомо багато методів апроксимації різних функцій, які забезпечують високу точність при невеликій кількості точок - поліноміальна апроксимація [10], апроксимація раціональними функціями (з використанням базису Флоатера-Хорманна) [11], апроксимація сплайнами (регресійним сплайном зі штрафного функцією) [12], апроксимація з використанням лінійного методу найменших квадратів [13]. Однак ідентифікація індивідуальної функції перетворення багатопараметричних сенсорів на основі повірки пов'язана із значною трудомісткістю. Якщо для однопараметричних сенсорів потрібно 5…7 точок повірки, то для багатопараметричних сенсорів кількість точок повірки повинна бути аналогічною для кожної вимірюваної фізичної величини. Таким чином, для багатопараметричних сенсорів кількість точок повірки може відповідати квадрату (для двох вимірюваних фізичних величин), кубу (для трьох вимірюваних фізичних величин) та вищим степеням від кількості точок повірки однопараметричних сенсорів. Наприклад, для двох вимірюваних фізичних величин ідентифікація індивідуальної функції перетворення кожного 2 багатопараметричного сенсора з високою точністю вимагає n(5…7) =25…49 точок повірки. Звідси видно, що для багатопараметричних сенсорів суттєво зростають трудомісткість повірки і ціна лабораторного обладнання, необхідного для ідентифікації його Індивідуальної функції перетворення з високою точністю. Такий висновок можна підтвердити тим, що універсальним математичним методом апроксимації поверхні (для двопараметричного сенсора) є розбиття цієї поверхні на множину елементарних плоских прямокутників або квадратів настільки малих розмірів, що в їх межах нелінійністю функції перетворення сенсора можна нехтувати. Зрозуміло, що для суттєвого підвищення точності багатопараметричних сенсорів шляхом ідентифікації їх індивідуальної функції перетворення для сенсора з логарифмічною функцією перетворення (як це має місце, 1 UA 103802 C2 5 10 15 20 25 30 35 40 45 50 55 60 наприклад для багатопараметричних сенсорів фірми Figaro [4]) необхідна кількість точок повірки є навіть більшою за n=49, що відповідно збільшує трудомісткість цього шляху. Для зменшення трудомісткості ідентифікації індивідуальної функції перетворення різними дослідниками пропонуються різні методи [14]. Наприклад, Дерде та Массарт [15] проводять якісний аналіз методів класифікації популярних в загальній хімометрії, зокрема методів гнучкого незалежного моделювання аналогій класу (ГНМАК) - Soft Independent Modeling of Class Analogy, дискримінантного лінійного аналізу та ін. за критеріями оптимальних границь рішень, областей перекриття, точності визначення, викидів. Основні висновки цих дослідників - вибір кращого методу ідентифікації функції перетворення істотно залежить від сфери застосування; кращі результати дає використання змішаних підходів. Найбільш повний аналіз методів розпізнавання вихідних сигналів багатопараметричних сенсорів здійснено в [16]. Автори проаналізували 23 методи розпізнавання, базовані на машинному навчанні, статистичних та нейромережевих підходах і порівняли їх кількісно та якісно. Їх висновки зводяться до того, що нейромережеві методи дають найкращі показники, проте вимагають довгого часу навчання та інтуїції експерта дослідника для цілеспрямованого застосування. Прототипом запропонованого способу ідентифікації індивідуальної функції перетворення багатопараметричного сенсора є апроксимація індивідуальної функції перетворення багатопараметричних сенсорів за допомогою навченої на результатах повірки нейронної мережі [17]. Однак прототип характеризується суттєвим зниженням точності ідентифікації індивідуальної функції перетворення багатопараметричних сенсорів при зменшенні кількості точок повірки. Необхідно відмітити, що така властивість - необхідність для високої точності навчання достатньо великої навчальної вибірки - притаманна всім нейромережевим методам [18]. Задачею пропонованого способу є забезпечення високої точності ідентифікації індивідуальної функції перетворення багатопараметричного сенсора при значному скороченні необхідної кількості точок дійсної повірки шляхом прогнозу результатів повірки в інших точках за допомогою комплексу нейронних мереж, що навчалися на результатах попередньої повірки групи однотипних багатопараметричних сенсорів у кількості точок, яка є достатньою для ідентифікації індивідуальної функції перетворення багатопараметричних сенсорів цього типу із заданою точністю. Суть способу полягає в тому, що для ідентифікації індивідуальної функції перетворення даного багатопараметричного сенсора залучається додаткова інформація про характер функції перетворення багатопараметричних сенсорів даного типу, отримана на основі результатів повірки групи однотипних багатопараметричних сенсорів у відносно великій кількості точок, наприклад, n=25…49 (назвемо ці результати базою даних). Це дозволяє нейронним мережам виявити та узагальнити закономірності, характерні для функцій перетворення багатопараметричних сенсорів даного типу. Згідно з цими виявленими характерними закономірностями та результатами повірки даного багатопараметричного сенсора в скороченій кількості точок результати його повірки в інших точках прогнозуються. Це дозволить отримати результати повірки даного багатопараметричного сенсора в повному наборі точок - як в тих, де його повірка дійсно проводилася, так і в інших точках функції перетворення, де його повірка насправді не проводилась. Основами для отримання високої точності прогнозу служить база даних повірки групи однотипних багатопараметричних сенсорів у кількості точок, яка є достатньою для ідентифікації індивідуальної функції перетворення багатопараметричних сенсорів цього типу із заданою точністю, а також індивідуальне нейромережеве прогнозування в кожній точці згідно з описаною нижче методикою. Для кожної з прогнозованих точок функції перетворення (для якої повірка даного сенсора не проводилась) використовують три множини нейронних мереж, причому кожна нейронна мережа прогнозує результат повірки тільки в одній точці повірки: 1. Нейронні мережі множини А, які позначимо АНК (Н - номер точки прогнозованого результату повірки; К - номер варіанта конфігурації точок повірки групи однотипних багатопараметричних сенсорів, які відповідають даній мережі). Прогноз значення результату повірки даного багатопараметричного сенсора в точці Н нейронні мережі множини А ведуть на базі результатів його повірки та результатів повірки групи однотипних багатопараметричних сенсорів в точках, які належать одній прямій, що проходить через точку Н. Кількість К таких прямих (i, відповідно, нейронних мереж) визначається кількістю прямих, які можна провести через точку Н і точки дійсної повірки даного багатопараметричного сенсора. 2. Нейронні мережі множини В, які позначимо ВНМ (Н - номер точки прогнозованого результату повірки; М - номер варіанта конфігурації точок повірки групи однотипних 2 UA 103802 C2 5 10 15 20 25 30 35 40 45 50 55 60 багатопараметричних сенсорів, які відповідають даній мережі). Прогноз значення результату повірки даного багатопараметричного сенсора в точці Н нейронні мережі множини В ведуть на базі результатів його повірки та результатів повірки групи однотипних багатопараметричних сенсорів в точках, що прилягають до точки Н різним чином. Кількість М варіантів конфігурації точок повірки групи однотипних багатопараметричних сенсорів визначається кількістю фігур, які можна описати навколо точки Н і які включають точки дійсної повірки даного багатопараметричного сенсора. 3. Нейронні мережі множини С, які позначимо СН (Н - номер точки прогнозованого результату повірки). Ці нейронні мережі об'єднують окремі результати прогнозу результатів повірки, отримані за допомогою нейронних мереж множин АНК і ВНМ. Результати повірки групи однотипних багатопараметричних сенсорів у великій кількості точок дозволяють нейронним мережам виявити та узагальнити закономірності, характерні для функцій перетворення даного типу сенсорів. При цьому використання набору нейронних мереж, кожна з яких спеціалізується на прогнозі результатів повірки в одній точці, за результатами повірки в інших точках, що кожен раз входять у строго заданий набір, дозволяє підвищити точність прогнозу. Наприклад, кожна нейронна мережа використовує результати повірки, які лежать на одній прямій з прогнозованою точкою повірки. Ця пряма задається спільною для точок дійсної повірки даного сенсора, точок повірки однотипних сенсорів і точки, результати повірки якої прогнозуються. Таким чином досягається взаємно-однозначна відповідність умов навчання нейронної мережі та прогнозу, що сприяє високій точності навчання нейронних мереж і, тим самим, високій точності прогнозу. Заміна операцій пропонованого способу або зміна їх послідовності погіршить спеціалізацію нейронних мереж і відповідність умов навчання та прогнозу, що призведе до зростання похибки прогнозу. Аналогічно, при прогнозі за допомогою груп точок повірки, прилеглих до точки, де повірка не проводилась, використання окремих нейронних мереж для цих груп дозволяє забезпечити взаємно-однозначну відповідність умов навчання нейронної мережі та прогнозу, що теж сприяє високій точності навчання нейронних мереж і, тим самим, високій точності прогнозу. В результаті виконання перелічених операцій способу отримуємо досить великий набір прогнозованих результатів повірки в точці, де повірка не проводилась. Кожен з цих результатів є спотвореним деякою похибкою, однак ці похибки носять випадковий характер. Відомі методи зменшення впливу випадкової похибки на результат вимірювання передбачають усереднення отриманих прогнозів [13], знаходження медіанного значення, виключення промахів (наприклад, за методом 3) [6]. Ще вищу точність можна отримати за рахунок об'єднання результатів прогнозу з допомогою способу, який, відповідно до особливостей даного типу сенсорів, враховує різну достовірність прогнозу по різних прямих і групах точок повірки, прилеглих до точки, де повірка не проводилась. Для цього результати прогнозів в кожній точці, де повірка не проводилась, об'єднують з допомогою нейронної мережі, навченої на результатах повірки групи однотипних сенсорів для тих самих умов прогнозу, щоби досягнути взаємно-однозначної відповідності умов навчання та прогнозу. Таким чином, між операціями пропонованого способу та метою винаходу існує взаємний зв'язок - операції є необхідними для реалізації способу та достатніми для отримання високої точності прогнозу при значному скороченні кількості точок повірки даного сенсора, тобто зменшенні трудомісткості ідентифікації його індивідуальної функції перетворення. Результати повірки однотипних багатопараметричних сенсорів у великій кількості точок хоча і збільшують згадану трудомісткість, однак таке збільшення має місце лише на початковому етапі, його результати можуть використовуватися при повірці всіх сенсорів даного типу, тому в результаті можна отримати значне зменшення середньої трудомісткості ідентифікації індивідуальної функції перетворення багатопараметричних сенсорів. Виконання процедур ідентифікації пропонованим способом ілюструється фіг. 1…3. На фіг. 1 представлено розміщення точок повірки по діапазонах перетворення двох фізичних величин А і В багатопараметричного сенсора, на фіг. 2 - спосіб ідентифікації точок індивідуальної функції перетворення багатопараметричного сенсора згідно з другим пунктом формули винаходу (за прямими, що проходять через прогнозовану точку функції перетворення багатопараметричного сенсора), на фіг. 3 - спосіб ідентифікації точок індивідуальної функції перетворення багатопараметричного сенсора згідно з третім пунктом формули винаходу (за групами точок, що прилягають до прогнозованої точки функції перетворення багатопараметричного сенсора). Проілюструємо реалізацію пропонованого способу на прикладі двопараметричного сенсора. Для цього спочатку проводять попередню повірку групи 30…50 однотипних сенсорів у великій кількості, наприклад, у 49 точках - по 7 точок повірки для кожної з двох фізичних величин. При рівномірному розподілі точок повірки по діапазонах перетворення обох фізичних величин їх 3 UA 103802 C2 5 10 15 20 25 30 35 40 45 50 55 60 розміщення показує фіг. 1. По осі абсцис відкладені значення першої фізичної величини А, а по осі ординат - значення другої фізичної величини В. 49 точок повірки однотипних сенсорів, від точки 11 до точки 77, показані тонкими кільцями. Сенсор, індивідуальну функцію перетворення якого ми визначаємо, повірений в 9 точках, які позначені на фіг. 1 товстими кільцями - точки 22, 24, 26, 42, 44, 46, 62, 64, 66 (в номері точки перша цифра відповідає фізичній величині А, а друга - фізичній величині В). Ці точки повірки відповідають точкам повірки однотипних сенсорів, однак їх всього 9. Задачею пропонованого способу є виконання прогнозу значень результатів повірки у всіх точках повірки (тонкі кільця) на основі результатів дійсної повірки сенсора в 9 точках (товсті кільця). Для вирішення цієї задачі маємо результати повірки однотипних сенсорів (тонкі кільця). Критерієм якості вирішення задачі є висока точність прогнозованих результатів повірки в точках 11, 12, 13, 14, 15, 16, 17, 21, 23, 25, 27, 31, 32, 33, 34, 35, 36, 37, 41, 43, 45, 47, 51, 52, 53, 54, 55, 56, 57, 61, 63, 65, 67, 71, 72, 73, 74, 75, 76, 77. На першому етапі прогнозуємо результати повірки сенсора, вибираючи його дійсні точки повірки та точки повірки однотипних сенсорів, що лежать на одній прямій з прогнозованою точкою функції перетворення багатопараметричного сенсора. Наприклад, для прогнозованої точки функції перетворення багатопараметричного сенсора 34 цей процес ілюструється фіг. 2. Через точку 34 можна провести три прямі, які містять також точки дійсної повірки сенсора: пряма № 1 - через точки 24, 44, 64; пряма № 2 - через точки 26, 42; пряма № 3- через точки 22, 46. Одночасно в пряму № 1 ввійдуть точки повірки однотипних сенсорів 14, 34, 54, 74. Кожній прямій відповідає своя нейронна мережа, їх множина входить в групу А. Їх навчання проводиться за результатами повірки групи, наприклад, 50 однотипних багатопараметричних сенсорів у великій кількості точок (у 49 точках). Навчальна вибірка, наприклад, для прямої № 1, формуєтьсянаступним чином. Один з сенсорів групи, наприклад перший, приймається сенсором, який повіряють, інші - це група однотипних багатопараметричних сенсорів у великій кількості точок. Тому перший вектор навчання формують як набір чисел, розміщених, наприклад, в наступному порядку: 1. Значення результатів повірки сенсора, який повіряють, в точках 24, 44, 64; 2. Значення результатів повірки найбільш подібного сенсора до того сенсора, який повіряють, серед групи однотипних багатопараметричних сенсорів у точках 14, 24, 34, 44, 54, 64, 74; 3. Значення результатів повірки наступного за подібністю сенсора до того сенсора, який повіряють, серед групи однотипних багатопараметричних сенсорів у точках 14, 24, 34, 44, 54, 64, 74; 4. Продовжити виконання пунктів для всіх сенсорів згідно зменшення подібності. 5. Значення результатів повірки найменш подібного сенсора до того сенсора, який повіряють, серед групи однотипних багатопараметричних сенсорів у точках 14, 24, 34, 44, 54, 64, 74; 6. Значення результату повірки сенсора, прийнятого сенсором, який повіряють, в точці 34. Найбільш подібний сенсор серед групи однотипних багатопараметричних сенсорів до сенсора, який повіряють, визначається за мінімумом суми абсолютних значень відхилень результатів повірки сенсора серед групи однотипних багатопараметричних сенсорів від результатів повірки сенсора, який повіряють, в тих точках дійсної повірки, які належать прямій, згідно з якою прогнозують результат повірки сенсора, який повіряють. Наступний за подібністю сенсор буде мати більшу (наступну) суму абсолютних значень відхилень результатів повірки сенсора серед групи однотипних багатопараметричних сенсорів від результатів повірки сенсора, який повіряють. Для найменш подібного сенсора вказана сума буде максимальною. Таким чином, при виконанні операцій пп. 1…6, сенсори в складі навчального вектора, що входять в групу однотипних багатопараметричних сенсорів, розміщуються в порядку зменшення їх подібності до сенсора, який повіряють, саме в тих точках, згідно з якими ведеться прогноз значення повірки. Останнім в ряду буде записано значення, яке є метою навчання (з яким порівнюється результат роботи нейронної мережі). Слід відзначити, що порядок запису значень результатів повірки, приведений в пп. 1…6, може бути інший, але він мусить бути завжди однаковий, тільки тоді нейронна мережа при навчанні має можливість виявити закономірності, що визначають відхилення функції перетворення багатопараметричних сенсорів від номінальної. Тому важливим є не сам порядок розміщення значень результатів повірки в складі навчального вектора, а його сталість (незмінність) як при навчанні, так і при прогнозі. Наступний вектор навчальної вибірки формується шляхом визначення іншого сенсора тим, який повіряють, серед групи однотипних багатопараметричних сенсорів, які були повірені у всіх 4 UA 103802 C2 5 10 15 20 25 30 35 40 45 50 55 60 точках повірки. Для формування навчальної вибірки знову повторюють пп. 1…6. Процес формування навчальних векторів продовжують до того моменту, коли всі сенсори групи однотипних багатопараметричних сенсорів, які були повірені у всіх точках повірки, не побувають в ролі того сенсора, який повіряють. Для прогнозу можна використати нейронні мережі типу тришарового персептрона [18…20] з кількістю вхідних нейронів, що відповідає кількості значень результатів повірки у даній точці. Вихідний нейрон - один. Кількість нейронів схованого шару та вид функції їх активації слід вибирати експериментально, за результатами пробних навчань. Для забезпечення добрих узагальнюючих властивостей слід, згідно з рекомендаціями [18, 20], вибирати кількість нейронів схованого шару якнайменшою. Після навчання нейронної мережі на такій навчальній вибірці її коефіцієнти відбивають закономірності відхилення функції перетворення багатопараметричних сенсорів від номінальної. Така навчена нейронна мережа може бути використана для прогнозу результатів повірки сенсора, який дійсно повіряють, в точці повірки 34 згідно з прямою № 1. При використанні навченої нейронної мережі для прогнозу результатів повірки сенсора, який повіряють, результати його повірки в точках 24, 44, 64 підставляють у вектор прогнозу на місце, де були результати повірки сенсора, який імітував сенсор, який повіряють, під час навчання нейронної мережі в цих же ж точках (згідно з п. 1). Далі розміщують результати повірки найбільш подібного сенсора, далі наступного (згідно з пп. 2, 3, 4). Значення результатів повірки найменш подібного сенсора до того сенсора, який повіряють, відкидають. В результаті нейронна мережа прогнозує з високою точністю значення результату повірки сенсора, який дійсно повіряють, в точці 34 за прямою № 1. Для прогнозу результатів повірки сенсора, який дійсно повіряють, в точці повірки 34 згідно з прямою № 2 та № 3 слід повторити всі описані операції заново і навчити відповідні нейронні мережі. Для прогнозу результатів повірки в інших точках також слід навчити відповідні нейронні мережі. При цьому слід зважати на подібність способів проведення прямих через точки 43, 45, 54 до прямих через точку 34. Через точки 33, 35, 53, 55 можна провести дві прямі - через точки 22, 44, 66 та через точки 24, 42. Через точки 11, 12, 13, 14, 15, 16, 17, 21, 23, 25, 27, 31, 32, 36, 37, 41, 47, 51, 52, 56, 57, 61, 63, 65, 67, 71, 72, 73, 74, 75, 76, 77 можна провести лише одну пряму. Тому похибка прогнозу в цих точках може бути дещо вищою. Всі навчені згідно описаного вище способу нейронні мережі створюють множину АНК. Для додаткового підвищення точності прогнозу можна використати додаткову інформацію, яка міститься в неявному виді в результатах повірки групи однотипних багатопараметричних сенсорів. Для цього можна використати результати повірки для груп точок, прилеглих до точки, де повірка не проводилась. На фіг. 3 показано трикутні групи точок, прилеглі до точок 35 і 53. При цьому щоби не затемнювати фіг. 3 цифрами вказані трикутні групи, які формуються шляхом повороту трикутників, які позначені № 1. Порядок формування навчальної вибірки, навчання індивідуальних нейронних мереж і прогнозу результатів повірки сенсора, який дійсно повіряють, повністю аналогічний описаному вище. Аналогічно до чотирьох менших трикутників, представлених на фіг. 3, формують по чотири трикутники для точок 33, 53, 55. Більший трикутник, представлений на фіг. 3, може служити для прогнозу результатів повірки як в точці 53, так і в точках 54, 63 (однак для кожної точки необхідно навчити свою нейронну мережу). Аналогічно до представлених на фіг. 3 чотирьох варіантів більшого трикутника можна сформувати такі ж трикутники для груп точок: 22, 24, 42, 44; 24, 26, 44, 46; 44, 46, 64, 66. На фіг. 4 представлено великі трикутники на базі точок 22, 24, 26, 44, сформовані для прогнозу результатів повірки в точках 23, 25, 33, 34, 35. Аналогічні трикутники можна сформувати: на базі точок 26, 44, 46, 66 для прогнозу результатів повірки в точках 35, 36, 45, 55, 56; на базі точок 44, 62, 64, 66 для прогнозу результатів повірки в точках 53, 54, 55, 63, 65; на базі точок 22, 42, 44, 62 для прогнозу результатів повірки в точках 32, 33, 43, 52, 53. Для кожної точки необхідно навчити свою нейронну мережу. На фіг. 5 зліва представлено додатковий трикутник, який на базі точок 24, 26 дозволяє отримати додатковий прогноз для точки 34. Шляхом повороту такого додаткового трикутника можна отримати ще вказаних цифрами п'ять значень результату прогнозу в точках 25, 34, 35, 36, 43, 45. Таким чином можна побудувати такі додаткові трикутники на базі точок: 22, 24; 24, 26; 42, 44; 44, 46; 62, 64; 64, 66; 22, 42; 42, 62; 24, 44; 44, 64; 26, 46; 46, 66. Для кожної пари точок можна побудувати чотири трикутники, тобто отримати 48 результатів повірки. Як видно з попереднього опису, точки повірки в центральній частині функції перетворення багатопараметричного сенсора, який повіряють, за допомогою описаних операцій можна 5 UA 103802 C2 5 10 15 20 25 30 35 40 45 50 55 60 спрогнозувати багато разів. А точки периферійної частини описані операції прогнозують значно рідше. Для підвищення точності прогнозу можна використати додаткові трикутники, представлені в правій частині фіг. 5, де на базі точок 62 і 64 показано прогноз точок 71, 72, 73, 74, 75 (для того, щоби не затемняти фіг. 5 показано тільки два трикутники, які прогнозують точки 71 і 75). Аналогічно можна побудувати такі трикутники на базі пар точок: 22, 24; 24, 26; 26, 46; 46, 66; 64, 66; 22, 42; 42, 62. Через те, що на базі кожної пари трикутників можна отримати прогноз п'яти точок повірки, разом отримаємо ще 35 точок. Слід відзначити, що для прогнозу точок повірки багатопараметричного сенсора, який повіряють, можна використати не тільки трикутники. На фіг. 6 представлено використання квадратів, прилеглих до точки повірки. Зокрема, квадрат точок 22, 24, 42, 44 дійсної повірки дозволяє прогнозувати результати повірки сенсора, який повіряють, в точках 23, 32, 33, 34, 43 (як вже вказувалося, для кожної точки необхідно навчити свою нейронну мережу). Аналогічні квадрати можна побудувати на базі точок: 24, 26, 44, 46; 42, 44, 62, 64; 44, 46, 64, 66. Квадрати дозволять отримати прогноз ще 20 точок. Для прогнозу результатів повірки багатопараметричного сенсора, який повіряють, можна використати також представлені на фіг. 6 великі квадрати, наприклад, 22, 24, 26, 42, 44, 46. Цей квадрат дозволяє прогнозувати результати повірки в точках 23, 25, 32, 33, 34, 35, 36, 43, 45. Аналогічні квадрати можна побудувати на базі точок: 42, 44, 46, 62, 64, 66; 22,24, 42, 44, 62, 64; 24, 26, 44, 46, 64, 66. Великі квадрати дозволять отримати прогноз ще 36 точок. Всі навчені на прилеглих трикутниках і квадратах нейронні мережі створюють множину ВНМ. В результаті навчання множин нейронних мереж АНК і ВНМ та використання їх для прогнозу результатів повірки сенсора, який повіряють, отримуємо велику кількість прогнозованих результатів - по декілька в кожній точці прогнозу. Це дозволяє підвищити точність прогнозу за рахунок їх об'єднання. Однак використання усереднення не дає можливості максимального підвищення точності через те, що результати прогнозу мають різну достовірність. Тому для їх об'єднання також використаємо нейронні мережі множини СН. Кожна з них об'єднує (узагальнює) результати прогнозу в одній точці повірки. Навчальні вибірки для них формуємо аналогічно до описаного в пп. 1…6. Вектори навчання формують як набори чисел, розміщених, наприклад, в наступному порядку: 1. Всі результати прогнозу за допомогою АНК результатів повірки групи однотипних сенсорів (за виключенням результатів повірки сенсора, прийнятого за сенсор, який повіряють), впорядковані, наприклад, за годинниковою стрілкою від вертикальної лінії проведеної від поточної точки прогнозу (для розглянутого на фіг. 2 випадку - спочатку прогноз, отриманий з допомогою прямої 3, потім 1, потім 2); 2. Всі результати прогнозу за допомогою ВНМ результатів повірки групи однотипних сенсорів (за виключенням результатів повірки сенсора, прийнятого за сенсор, який повіряють), впорядковані, наприклад, згідно з нумерацією на фіг. 3…6. 3. Значення результату повірки сенсора, прийнятого сенсором, який повіряють, в даній точці. Аналогічно, як і для множин нейронних мереж АНК і ВНМ, для множини нейронних мереж СН не стільки важливий порядок розміщення результатів прогнозу, скільки його сталість (незмінність) при навчанні і при прогнозуванні. Навчання множини нейронних мереж СН, а також їх використання для об'єднання результатів прогнозу в усіх точках, де сенсор, який повіряють, в дійсності не повіряли, проводять аналогічно до множин нейронних мереж АНК і ВНМ. В результаті узагальнюючих властивостей нейронних мереж нейронні мережі СН об'єднають результати прогнозу відповідно до отриманої в результаті навчання ваги (достовірності) кожного прогнозу, що дозволяє підвищити точність вихідного прогнозованого результату повірки. Таким чином, в результаті використання пропонованого способу ідентифікації індивідуальної функції перетворення багатопараметричного сенсора за результатами його повірки в скороченій кількості точок можна отримати високу точність прогнозу результатів повірки в тих точках, де ця повірка в дійсності не проводилася і, тим самим, дуже суттєво скоротити кількість точок дійсної повірки багатопараметричного сенсора для отримання малої похибки його індивідуальної функції перетворення. Пропонований спосіб може отримати широке використання, наприклад, в системах захисту від перевищення допустимої концентрації газів, зокрема, захисту від перевищення безпечної концентрації метану та закису вуглецю в шахтах, а також в системах газового аналізу, де можна застосувати двопараметричні сенсори на основі окису олова. Також пропонований спосіб можна використати в системах корекції впливу динамічної зміни температури напівпровідникового кристалу на результат вимірювання фізичної величини сенсором, реалізованим на цьому кристалі. Наприклад, для корекції 6 UA 103802 C2 5 10 15 20 25 30 35 40 45 50 температурної похибки фотодіода, викликаної його нагрівом вимірюваним світловим потоком. В такому випадку сенсор температури довільного типу, розміщений поряд з фотодіодом буде мати значну динамічну похибку через запізнення результату його вимірювання відносно температури кристалу фотодіода, викликану малою швидкістю процесу теплопередачі. Тільки в тому випадку динамічна похибка буде малою, коли сам фотодіод буде сенсором своєї температури. Однак в такому випадку фотодіод стає двопараметричним сенсором, в якому генерована фото-е.р.с. служить мірою світлового потоку (однак вона залежить і від температури кристалу), а спад напруги при проходженні прямого струму через фотодіод служить мірою температури кристалу (однак він залежить і від світлового потоку, який падає на кристал). Ідентифікація індивідуальної функції перетворення такого фотодіода як двопараметричного сенсора дозволяє реалізувати корекцію температурної похибки з високою точністю. Джерела інформації:: 1. Поліщук Є.С., Обозовський С.С., Шморгун Є.І., Кочан В.О. Електричні вимірювання електричних та неелектричних величин. За ред. проф. Є.С. Поліщука - Київ. Вид-во „Вища школа", 1978.-352 с. 2. ГОСТ 8.009-84. Електронний ресурс (http://neo-chaos.narod.ru/useful/gost/gost_8_00984.pdf) 3. Методы оценки рабочих характеристик измерительных преобразователей, предназначенных для использования в системах управления промышленными процессами. /Стандарт МЭК, публикация 770. 4. http://www.figarosensor.сom/products/813pdf.pdf 5. Новицкий П.В., Зограф И.А. Оценка погрешностей результатов измерений. - Л.; Энергоатомиздат (Ленингр. отд-ние),1985.-248 с, ил. 6. Поліщук Є.С., Дорожовець М.М., Яцук В.О. та ін. "Метрологія та вимірювальна техніка", за ред. Є.С. Поліщука, Львів Бескид Біт, 2003.-544 с. 7. Специальные термометры с термопреобразователями сопротивления / Е.И. Фандеев, Г.А. Лущаев, В.А. Карчков. – М.: Энергоатомиздат, 1987.-96 с: ил. – (Б-ка по автоматике; Вып. 663) 8. Куинн Т. Температура. Пер. с англ. М. Мир 1985 г.-448 с, ил. 9. Рогельберг И.Л. Сплавы для термопар / И.Л. Рогельберг, В.М. Бейлин. - М.: Металлургия, 1983.-360 с. 10. Богуславский И.А. Полиномиальная аппроксимация для нелинейных задач оценивания и управления. Изд: ФИЗМАТЛИТ, 2006 г.-208 стр. 11. Уолш Дж. Л. Интерполяция и аппроксимация рациональными функциями в комплексной области. Издательство иностранной литературы. М., 1961,-505 с. 12. Алберг Дж., Нильсон В., Уолш Дж. Теория сплайнов и ее приложения. М.: Мир, 1972,-316 с. 13. Калинкин Н.Н. Численные методы. Изд. Наука, 1978,-512 с. 14. Daqi G. An electronic nose and modular radial basis function network classifiers for recognizing multiple fragrant materials / Daqi G., Shuyan W., Yan J. // Sensors and Actuators B.2004. - Vol. 97, No. 2-3. - P. 391-401. 15. Derde M.P. Supervised pattern recognition: the ideal method? / Derde M.P., Massart D.L. // Analytica Chimica Acta.-1986. - Vol. 191. - P. 1-16. 16. Michie D. Machine Learning, Neural and Statistical Classification / Michie D., Spiegelhalter D.J., Taylor C.C. - New York: Ellis Horwood, 1994. 17. Крисилов В.А., Чумичкин К.В., Кондратюк А.В. Представление исходных данных в задачах нейросетевого прогнозирования // В сб. научных трудов V Всероссийской научнотехнической конференции "Нейроинформатика-2003", Том 1., Москва: МИФИ., 2003, С. 184-191. 18. Kroese В. An introduction to Neural Networks. - Amsterdam: Univercity of Amsterdam.-1996.120 p. 19. http://alglib.sources.ru/dataanalysis/mlpensembles.php 20. Головко В.А. Нейроинтеллект: теория и применение. Книга 1: Организация и обучение нейронных сетей с прямыми и обратными связями. - Брест: Изд. БПИ, 1999.-264 с. 55 ФОРМУЛА ВИНАХОДУ 60 1. Спосіб ідентифікації індивідуальної функції перетворення багатопараметричного сенсора за результатами його повірки, при якому результати повірки у точках, де повірка не проводилась, прогнозують шляхом обробки дійсних результатів повірки, який відрізняється тим, що прогноз результатів повірки в точках, де повірка не проводилась, проводять за допомогою набору 7 UA 103802 C2 5 10 15 20 25 30 35 нейронних мереж, навчених на результатах попередньої повірки групи однотипних багатопараметричних сенсорів у кількості точок, достатній для ідентифікації індивідуальної функції перетворення багатопараметричних сенсорів цього типу із заданою точністю, причому для прогнозу результатів повірки в кожній точці використовують окрему нейронну мережу, навчену на результатах повірки, при яких значення фізичних величин належать заданому набору точок повірки відносно точки, результати повірки якої прогнозуються. 2. Спосіб ідентифікації індивідуальної функції перетворення багатопараметричного сенсора за п. 1, який відрізняється тим, що прогноз результатів повірки даного сенсора в кожній точці, де повірка не проводилась, ведуть окремо для всіх прямих, які можна провести через цю і сусідні точки дійсної повірки. 3. Спосіб ідентифікації індивідуальної функції перетворення багатопараметричного сенсора за п. 1, який відрізняється тим, що прогноз результатів повірки даного сенсора в кожній точці, де повірка не проводилась, ведуть окремо для груп точок повірки, прилеглих до точки, де повірка не проводилась. 4. Спосіб ідентифікації індивідуальної функції перетворення багатопараметричного сенсора за п. 1, який відрізняється тим, що окремі прогнози результатів повірки даного сенсора в кожній точці, де повірка не проводилась, об'єднують за допомогою нейронних мереж, навчених на результатах повірки групи однотипних сенсорів для того ж самого заданого набору точок повірки. 5. Спосіб ідентифікації індивідуальної функції перетворення багатопараметричного сенсора за будь-яким з пп. 2-4, який відрізняється тим, що при навчанні відповідних нейронних мереж, кожен вхідний вектор навчання формують спочатку як набір значень результатів повірки сенсора, що імітує сенсор який повіряють, далі значень результатів повірки найбільш подібного сенсора серед групи однотипних багатопараметричних сенсорів, далі значень результатів повірки наступного за подібністю сенсора аж до найменш подібного сенсора, а вихідний - як результат повірки сенсора, що імітує сенсор, який повіряють, в точці, де результат повірки прогнозується, причому подібність визначається за мінімумом суми абсолютних значень відхилень результатів повірки сенсора серед групи однотипних багатопараметричних сенсорів від результатів повірки сенсора, що імітує сенсор, який повіряють, в точках дійсної повірки. 6. Спосіб ідентифікації індивідуальної функції перетворення багатопараметричного сенсора за п. 5, який відрізняється тим, що при прогнозі окремих результатів повірки сенсора, який дійсно повіряють, вхідний вектор кожної нейронної мережі формують як набір значень результатів повірки сенсора, який дійсно повіряють, далі значень результатів повірки найбільш подібного сенсора серед групи однотипних багатопараметричних сенсорів, далі значень результатів повірки наступного за подібністю сенсора аж до сенсора, який передує найменш подібному сенсору, причому значення результатів повірки найменш подібного сенсора відкидають. 8 UA 103802 C2 Комп’ютерна верстка А. Крижанівський Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 9
ДивитисяДодаткова інформація
Автори англійськоюRoschupkin Oleksii Yuriiovych, Kochan Volodymyr Volodymyrovych, Sachenko Anatolii Oleksiiovych
Автори російськоюРощупкин Алексей Юрьевич, Кочан Владимир Владимирович, Саченко Анатолий Алексеевич
МПК / Мітки
МПК: G06N 3/00, G01D 21/00
Мітки: сенсора, спосіб, ідентифікації, багатопараметричного, функції, індивідуальної, перетворення
Код посилання
<a href="https://ua.patents.su/11-103802-sposib-identifikaci-individualno-funkci-peretvorennya-bagatoparametrichnogo-sensora.html" target="_blank" rel="follow" title="База патентів України">Спосіб ідентифікації індивідуальної функції перетворення багатопараметричного сенсора</a>
Спосіб ідентифікації індивідуальної функції перетворення багатопараметричного сенсора
Номер патенту: 71181
Опубліковано: 10.07.2012
Автори: Кочан Володимир Володимирович, Рощупкін Олексій Юрійович, Саченко Анатолій Олексійович
МПК: G01D 21/00
Мітки: багатопараметричного, спосіб, сенсора, перетворення, функції, індивідуальної, ідентифікації
Формула / Реферат:
1. Спосіб ідентифікації індивідуальної функції перетворення багатопараметричного сенсора за результатами його повірки в скороченій кількості точок, при якому результати повірки у точках, де повірка не проводилась, прогнозують шляхом обробки дійсних результатів повірки, який відрізняється тим, що прогноз результатів повірки в точках, де повірка не проводилась, проводять за допомогою набору нейронних мереж, навчених на результатах попередньої...
Спосіб контролю втомного пошкодження за допомогою структурно-чутливого сенсора

Номер патенту: 73708
Опубліковано: 10.10.2012
Автори: Ігнатович Сергій Ромуальдович, Карускевич Михайло Віталійович, Маслак Тетяна Петрівна
МПК: G01N 3/32
Мітки: спосіб, допомогою, структурно-чутливого, втомного, контролю, пошкодження, сенсора
Формула / Реферат:
Спосіб контролю втомного пошкодження за допомогою структурно-чутливого сенсора, при якому про втомне пошкодження судять по параметрах деформаційного рельєфу поверхні сенсора, який відрізняється тим, що чутливістю сенсора керують шляхом оптимізації його геометрії.
Спосіб виготовлення робочого елемента сенсора магнітного поля
Номер патенту: 78575
Опубліковано: 25.03.2013
Автори: Крючин Андрій Андрійович, Манько Дмитро Юрійович, Петров В'ячеслав Васильович
МПК: G01R 33/09
Мітки: спосіб, робочого, виготовлення, поля, сенсора, магнітного, елемента
Формула / Реферат:
Спосіб виготовлення робочого елемента сенсора магнітного поля, у вигляді сендвічевих структур з двох фольг аморфних металевих сплавів на основі Со, та розділення їх мідною фольгою, який відрізняється тим, що на роздільний шар наносять об'ємний рельєф у вигляді подряпин з планарною чи коловою геометрією.
Спосіб виготовлення планарного електрохімічного сенсора кисню
Номер патенту: 82104
Опубліковано: 25.07.2013
Автори: Злобін Сергій Олександрович, Войтович Марія Володимирівна, Венгер Євген Федорович, Лісовський Ігор Петрович
МПК: C23C 14/00, G01N 27/00, G01M 15/00, G01N 7/00, C23C 4/00
Мітки: планарного, спосіб, кисню, виготовлення, сенсора, електрохімічного
Формула / Реферат:
Спосіб виготовлення планарного електрохімічного сенсора кисню, який включає нанесення на металеву підкладку шарів металічного нагрівача, ізолюючих шарів Аl2О3, поруватих каталітично-активних електродів Pd або Pt, суцільної плівки твердо-електролітної кераміки на базі діоксиду цирконію та поруватий захисний шар SiOx, який відрізняється тим, що всі шари наносять методом іонно-плазмового розпилення мішені у вакуумі, при цьому нагрівач, ізолюючі...
Спосіб отримання газового сенсора
Номер патенту: 92968
Опубліковано: 27.12.2010
Автори: Монастирський Любомир Степанович, Морозов Леонід Михайлович, Оленич Ігор Богданович, Соколовський Богдан Степанович
МПК: G01N 21/00, H01L 27/14, G01N 29/00
Мітки: газового, спосіб, сенсора, отримання
Формула / Реферат:
1. Спосіб отримання газового сенсора, який включає електрохімічне травлення монокристалічного кремнієвого матеріалу, створення захисного шару, виготовлення металічних контактів та під'єднання виводів для електричних вимірювань, який відрізняється тим, що проводять травлення монокристалічної кремнієвої пластини n- або р-типу провідності електрохімічним анодуванням у фторопластовій комірці з використанням розчину C2H5OH:HF у концентрації 1:1...
Попередній патент: Спосіб підвищення біодоступності інгібітора протеази ns3/4а вірусу гепатиту с
Наступний патент: Застосування 1-метоксикарбонілметил-7-бром-5-феніл-3-ариламіно-1,2-дигідро-3н-1,4-бенздіазепін-2-онів як анальгетичних засобів
Випадковий патент: Блок дренажний