Пристрій для керування адаптивним роботом
Номер патенту: 43682
Опубліковано: 25.08.2009
Автори: Кондратенко Юрій Пантелійович, Кондратенко Володимир Юрійович
Формула / Реферат
Пристрій для керування адаптивним роботом, що містить комп'ютерний блок керування, тактильні датчики, перший і другий приводи, датчик проковзування, вихід якого з'єднаний з входом підсилювача, послідовно з'єднані диференціатор, пороговий елемент, тригер та елемент ЗАПЕРЕЧЕННЯ, перший керований ключ, вихід якого підключений до входу першого привода, а сигнальний вхід - до третього виходу комп'ютерного блока керування, послідовно з'єднані елемент І та другий керований ключ, вихід якого з'єднаний з входом другого привода, а сигнальний вхід - з першим виходом комп'ютерного блока керування, другий вихід якого підключений до другого входу тригера, вихід підсилювача з'єднаний з входом диференціатора, а виходи тактильних датчиків з'єднані з першим та другим входами елемента І, який відрізняється тим, що до складу пристрою додатково введені датчик стискального зусилля, вихід якого підключений до першого входу комп'ютерного блока керування, і послідовно з'єднані елемент затримки, третій керований ключ, керований вхід якого підключений до виходу тригера, та суматор, вихід якого підключений до керованого входу першого керованого ключа, другий вхід суматора підключений до виходу елемента ЗАПЕРЕЧЕННЯ та входу елемента затримки, а вихід порогового елемента з'єднаний з другим входом комп'ютерного блока керування.
Текст
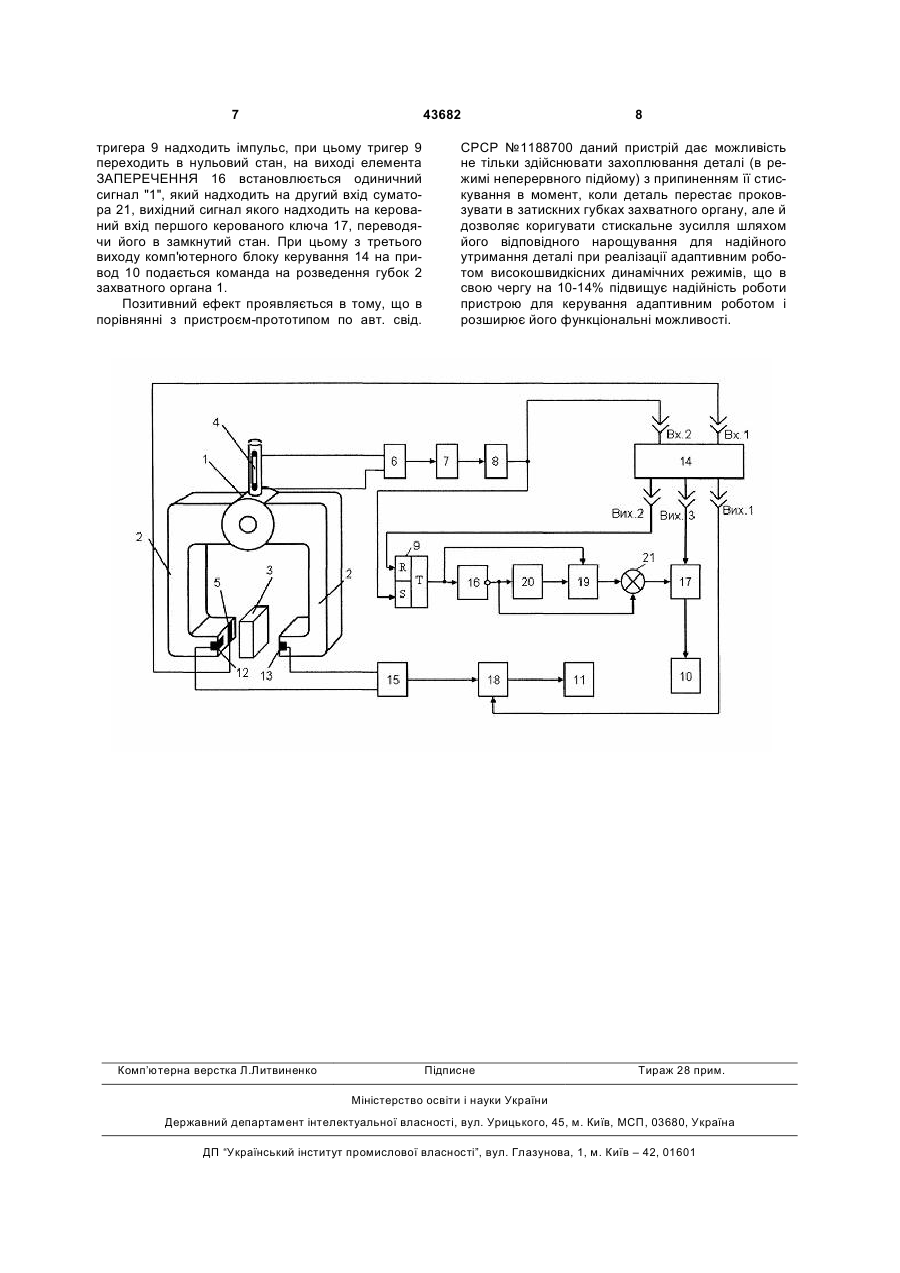
Пристрій для керування адаптивним роботом, що містить комп'ютерний блок керування, тактильні датчики, перший і другий приводи, датчик проковзування, вихід якого з'єднаний з входом підсилювача, послідовно з'єднані диференціатор, пороговий елемент, тригер та елемент ЗАПЕРЕЧЕННЯ, перший керований ключ, вихід якого підключений до входу першого привода, а сигнальний вхід - до третього виходу комп'ютерного блока керування, послідовно з'єднані елемент І та другий 3 намічних режимах можливість випадання деталі з губок захватного органу. Найбільш близьким до запропонованого є пристрій для керування адаптивним роботом [Авт. свід. СРСР №1188700, МПК G05В19/00, опубл. Бюл. №40, 1985], що прийнятий як прототип. Пристрій для керування адаптивним роботом містить захватний орган з губками, комп'ютерний блок керування, що виконує функції блока задавання програми, перший і другий тактильні датчики, перший і другий приводи відповідно для стискання губок та підйому захватного органу, датчик проковзування, послідовно з'єднані підсилювач, диференціатор, пороговий елемент, тригер, елемент ЗАПЕРЕЧЕННЯ й перший ключ, а також послідовно підключені елемент І й другий ключ, вихід якого з'єднаний з входом другого приводу, а другий сигнальний вхід - з першим виходом комп'ютерного блоку керування, підключеного другим виходом до другого входу тригера, а третім виходом - до другого сигнального входу першого ключа, вихід якого з'єднаний із входом першого приводу стискання губок, вихід датчика проковзування з'єднаний із входом підсилювача, а виходи тактильних датчиків з'єднані відповідно з першим і другим входами елемента І. Такий пристрій має наступні проблеми: - обмеженість використання пристрою через відсутність можливості розпізнавання деталей (об'єктів маніпулювання), що відрізняються між собою за масою; - низька надійність та низька швидкодія пристрою при реалізації роботом запланованої траєкторії, оскільки переміщення захватного органа з деталлю може здійснюватись тільки з невеликими швидкостями, що виключають в динамічних режимах можливість випадання деталі з губок захватного органу. Це пов'язано з тим, що створене адаптивним роботом стискальне зусилля губок точно відповідає масі деталі, а для надійного переміщення захватного органа з високими швидкостями величина стискального зусилля має перевищувати значення, що точно відповідає масі деталі, на величину, яка забезпечить її надійне утримання захватним органом при реалізації адаптивним роботом динамічних режимів з високими швидкостями переміщення. В основу корисної моделі поставлено задачу удосконалення пристрою для керування адаптивним роботом шляхом введення додаткових електронних блоків обробки сигналів, які дозволять підвищити надійність пристрою шляхом забезпечення (в режимі неперервного підйому) надійного захоплювання і утримування деталей з різною масою при реалізації адаптивним роботом динамічних режимів з високими швидкостями. Поставлена задача вирішується тим, що до складу пристрою для керування адаптивним роботом, що містить комп'ютерний блок керування, тактильні датчики, перший і другий приводи, датчик проковзування, вихід якого з'єднаний з входом підсилювача, послідовно з'єднані диференціатор, пороговий елемент, тригер та елемент ЗАПЕРЕЧЕННЯ, перший керований ключ, вихід якого підключений до входу першого привода, а сигнальний вхід - до третього виходу комп'ютерного блоку 43682 4 керування, послідовно з'єднані елемент І та другий керований ключ, вихід якого з'єднаний з входом другого привода, а сигнальний вхід - з першим виходом комп'ютерного блоку керування, другий вихід якого підключений до другого входу тригера, вихід підсилювача з'єднаний з входом диференціатора, а виходи тактильних датчиків з'єднані з першим та другим входами елемента І, згідно пропозиції додатково введені датчик стискального зусилля, вихід якого підключений до першого входу комп'ютерного блоку керування, і послідовно з'єднані елемент затримки, третій керований ключ, керований вхід якого підключений до виходу тригера, та суматор, вихід якого підключений до керованого входу першого керованого ключа, другий вхід суматора підключений до виходу елемента ЗАПЕРЕЧЕННЯ та входу елемента затримки, а вихід порогового елемента з'єднаний з другим входом комп'ютерного блоку керування. Винахідницький задум полягає в тому, що схемотехнічна особливість побудови пристрою для керування адаптивним роботом дозволяє розпізнавати деталі, які відрізняються між собою за масою, а також забезпечувати (в режимі неперервного підйому) формування захватним органом відповідної до надійної реалізації динамічних режимів величини стискального зусилля для кожної деталі з невідомою масою, тобто після захоплювання кожної деталі буде постійно здійснюватись корекція остаточного значення стискального зусилля з урахуванням її надійного утримання при високих швидкостях. При цьому надійність процесів захоплювання та реалізації запланованих траєкторій з високими швидкостями переміщення деталей підвищується орієнтовно на 10-14 %). На кресленні наведена функціональна схема пристрою для керування адаптивним роботом. Пристрій містить захватний орган 1, дві затискні губки 2, що захоплюють деталь 3, датчик 4 проковзування, датчик стискального зусилля 5, перший підсилювач 6, диференціатор 7, пороговий елемент 8, тригер 9, перший 10 і другий 11 приводи відповідно стискання губок 2 і підйому захватного органу 1, перший 12 і другий 13 тактильні датчики, комп'ютерний блок керування 14, елемент І 15, елемент ЗАПЕРЕЧЕННЯ 16, перший 17, другий 18 і третій 19 керовані ключі, елемент затримки 20 та суматор 21. Датчик 4 проковзування підключений до входу першого підсилювача 6, що послідовно з'єднаний з диференціатором 7 та пороговим елементом 8, вихід якого з'єднаний з першим входом тригера 9 та другим входом комп'ютерного блоку керування 14, перший вхід якого з'єднаний з датчиком стискального зусилля 5. Виходи тактильних датчиків 12 і 13 з'єднані відповідно з першим і другим входами елемента І 15. Вихід першого керованого ключа 17 підключений до входу першого привода 10, його сигнальний вхід до третього виходу комп'ютерного блоку керування 14, а керований вхід - до виходу суматора 21. Перший вхід суматора 21 підключений до виходу третього керованого ключа 19, а другий вхід - до виходу елемента ЗАПЕРЕЧЕННЯ 16 та входу елемента затримки 20. Вихід тригера 9 з'єднаний з входом елемента ЗАПЕРЕЧЕННЯ 16 і керованим 5 входом третього ключа 19, сигнальний вхід якого підключений до виходу елемента затримки 20. Вихід елемента І 15 з'єднаний з керованим входом другого керованого ключа 18, вихід якого з'єднаний з входом другого привода 19, а сигнальний вхід - з першим виходом комп'ютерного блоку керування 14, другий вихід якого підключений до другого входу тригера 9. Запропонований пристрій працює таким чином. У первинному стані адаптивний робот підводить захватний орган 1 з розведеними губками 2 до деталі 3, яку в подальшому необхідно захопити з величиною стискального зусилля губок 2, що відповідає апріорно невідомій масі деталі 3. Деталь 3 перебуває, наприклад, на робочій поверхні стола, на стрічці конвеєра тощо. Сигнали на виходах першого 12 і другого 13 тактильних датчиків відсутні, на виході елемента І 15 встановлено нульовий сигнал "0", другий 18 і третій 19 керовані ключі знаходяться у розімкнутому стані, тригер 9 встановлений у нульовий стан, на виході елемента ЗАПЕРЕЧЕННЯ 16 встановлено одиничний сигнал "1", який надходить на другий вхід суматора 21 та на вхід елемента затримки 20, формуючи на його виході також одиничний сигнал "1". Вихідний сигнал суматора 21 подається на керований вхід першого керованого ключа 17, який утримується при цьому в замкнутому стані. При необхідності захоплювання деталі 3 з третього виходу комп'ютерного блоку керування 14 подається команда на стискання губок 2 захватного органа 1. Ця команда через замкнутий перший керований ключ 17 надходить на привод 10 стискання губок 2, які починають наближуватись одна до одної. В момент, коли губки 2 захватного органа 1 торкаються деталі 3, спрацьовують тактильні датчики 12 і 13, на виході елемента І 15 встановлюється одиничний сигнал "1", другий керований ключ 18 замикається й команда на підйом захватного органа 1 з першого виходу комп'ютерного блоку керування 14 надходить на другий привод 11 підйому захватного органа 1, який починає підніматись у вертикальному напрямку. Губки 2 захватного органа 1 продовжують стискуватися, збільшуючи величину стискального зусилля губок 2 на деталі 3. При цьому через невідповідність маси деталі 3 величині стискального зусилля деталь 3 проковзує між губками 2, продовжуючи опиратися на поверхню стола. Поточне значення стискального зусилля губок 2 реєструється датчиком зусилля 5 і надходить на перший вхід комп'ютерного блоку керування 14. По мірі збільшення стискального зусилля губок 2 проковзування деталі 3 зменшується, при цьому зростає навантаження на захватний орган 1. Навантаження зростає до тих пір, поки має місце процес проковзування деталі 3 між губками 2 захватного органа 1. Величину цього механічного навантаження реєструє датчик проковзування 4 (наприклад, тензорезистор). Напруга з датчика 4 підсилюється підсилювачем 6 і диференціюється диференціатором 7. При невідповідності величини стискального зусилля губок 2 масі деталі 3 сигнал на виході диференціатора 6 не досягає порогу спрацьовування порогового елемента 8, а тому на 43682 6 перший вхід тригера 9 команда не надходять і стан пристрою в цей період не змінюється: під дією першого 10 і другого 11 приводів захватний орган 1 продовжує рух вгору, а губки 2 захватного органа 1 все сильніше стискують деталь 3. Коли величина стискального зусилля губок 2 захватного органа 1 виявиться достатньою для надійної фіксації деталі 3, тобто відповідає масі деталі 3, відбувається відрив деталі 3 від поверхні стола й підйом її захватним органом 1. При цьому за короткий час деталі 3 надається кінетична енергія, що фіксується датчиком проковзування 4 як короткочасне різке збільшення ваги деталі 3, тобто як збільшення механічного навантаження на захватний орган 1. Сигнал, що формується на виході датчика 4, в даний момент має викид. Цей сигнал підсилюється підсилювачем 6, диференціюється диференціатором 7, при цьому на виході диференціатора 7 формується імпульс великої амплітуди, що приводить до спрацьовування порогового елемента 8. Вихідний імпульс порогового елемента 8 надходить на другий вхід комп'ютерного блоку керування 14, який при цьому фіксує значення вихідного сигналу Fд датчика зусилля 5, що відповідає масі захоплюваної деталі. За цим сигналом комп'ютерний блок керування 14 розпізнає тип деталі 3 і формує відповідну до вимог технологічного процесу траєкторію її переміщення. Крім того, вихідний імпульс порогового елемента 8 переводить тригер 9 в одиничний стан, що призводить до замикання третього керованого ключа 19, на виході елемента ЗАПЕРЕЧЕННЯ 16 встановлюється нульовий сигнал "0", який надходить на другий вхід суматора 21 та на вхід елемента затримки 20, на виході якого ще протягом апріорно встановленого часу затримки tЗАТР буде утримуватись одиничний сигнал "1". Одночасно при замиканні третього керованого ключа 19 одиничний сигнал "1" з виходу елемента затримки надходить на перший вхід суматора 21, вихідний сигнал якого, як керуючий сигнал першого керованого ключа 17 буде утримувати ключ 17 в замкнутому стані. Величина стискального зусилля губок 2 захватного органа 1 буде нарощуватись протягом часу затримки tЗАТР. При цьому остаточне збільшення величини стискального зусилля в k разів необхідне для створення стискального зусилля FOCT=kFд, що буде виключати випадіння деталі 3 з захватного органа 1 в динамічних режимах, зокрема внаслідок прискорень, що виникають при реалізації адаптивним роботом запланованих траєкторій на високих швидкостях. Після досягнення стискального зусилля FОCT протягом часу затримки tЗАТР на виході елемента затримки 20, а відповідно і на виході суматора 21 встановлюються нульові сигнали "0", що призводить до розмикання першого керованого ключа 17. При цьому припиняється надходження команд з третього виходу комп'ютерного блоку керування 14 на перший привод 10 стискання губок 2 захватного органа 1. Деталь 3 при цьому надійно захоплена губками 2 захватного органа 1. Подальші маніпуляції з деталлю 3 здійснюються відповідно до реалізації запланованої траєкторії руху робота. Після завершення переміщення деталі 3 з другого виходу комп'ютерного блоку керування 14 на другий вхід 7 43682 тригера 9 надходить імпульс, при цьому тригер 9 переходить в нульовий стан, на виході елемента ЗАПЕРЕЧЕННЯ 16 встановлюється одиничний сигнал "1", який надходить на другий вхід суматора 21, вихідний сигнал якого надходить на керований вхід першого керованого ключа 17, переводячи його в замкнутий стан. При цьому з третього виходу комп'ютерного блоку керування 14 на привод 10 подається команда на розведення губок 2 захватного органа 1. Позитивний ефект проявляється в тому, що в порівнянні з пристроєм-прототипом по авт. свід. Комп’ютерна верстка Л.Литвиненко 8 СРСР №1188700 даний пристрій дає можливість не тільки здійснювати захоплювання деталі (в режимі неперервного підйому) з припиненням її стискування в момент, коли деталь перестає проковзувати в затискних губках захватного органу, але й дозволяє коригувати стискальне зусилля шляхом його відповідного нарощування для надійного утримання деталі при реалізації адаптивним роботом високошвидкісних динамічних режимів, що в свою чергу на 10-14% підвищує надійність роботи пристрою для керування адаптивним роботом і розширює його функціональні можливості. Підписне Тираж 28 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for control of adaptive robot
Автори англійськоюKondratenko Yurii Panteliiovych, Kondratenko Volodymyr Yuriiovych
Назва патенту російськоюУстройство для управления адаптивным роботом
Автори російськоюКондратенко Юрий Пантелеевич, Кондратенко Владимир Юрьевич
МПК / Мітки
МПК: G05B 19/00, B25J 19/02
Мітки: керування, роботом, пристрій, адаптивним
Код посилання
<a href="https://ua.patents.su/4-43682-pristrijj-dlya-keruvannya-adaptivnim-robotom.html" target="_blank" rel="follow" title="База патентів України">Пристрій для керування адаптивним роботом</a>
Пристрій для керування адаптивним роботом
Номер патенту: 31511
Опубліковано: 10.04.2008
Автори: Чернов Сергій Констянтинович, Кондратенко Володимир Юрійович, Марковський Ігор Володимирович, Кондратенко Юрій Пантелійович, Кондратенко Галина Володимирівна
МПК: B25J 19/02, G05B 19/00
Мітки: керування, роботом, адаптивним, пристрій
Формула / Реферат:
Пристрій для керування адаптивним роботом, що містить захватний орган, дві затискні губки, послідовно з'єднані датчик проковзування, перший підсилювач, диференціатор, пороговий елемент, вихід якого з'єднаний з S-входом першого RS-тригера, R-вхід якого призначений для сприйняття імпульсу запуску, елемент І, перший і другий входи якого з'єднані з виходами тактильних датчиків, встановлених на затискних губках, і приводи стискання губок та...
Пристрій для керування інтелектуальним роботом
Номер патенту: 41121
Опубліковано: 12.05.2009
Автори: Кондратенко Володимир Юрійович, Аль Суод Махмуд мохаммад Салем, Кондратенко Галина Володимирівна, Кондратенко Юрій Пантелійович
МПК: G05B 19/00, B25J 19/02
Мітки: інтелектуальним, пристрій, роботом, керування
Формула / Реферат:
Пристрій для керування інтелектуальним роботом, що містить захватний орган, дві затискні губки, послідовно з'єднані датчик проковзування, перший підсилювач, диференціатор, перший пороговий елемент, вихід якого з'єднаний з S-входом першого RS-тригера, R-вхід якого призначений для сприйняття сигналу запуску і є входом пристрою, елемент І, перший і другий входи якого з'єднані з виходами тактильних датчиків, встановлених на затискних губках,...
Пристрій керування

Номер патенту: 65665
Опубліковано: 15.04.2004
Автори: Чигирин Олег Трохимович, Чигирин Юрій Трохимович, Маранов Олександр Вікторович
МПК: G06F 11/00
Формула / Реферат:
Пристрій керування, що складається з багаторозрядного цифрового лічильного каналу, дешифратора, схеми керування, яка включає формувач і два елементи затримки, і генератора, вихід якого з'єднано з першими входами першого багаторозрядного цифрового лічильного каналу, схеми керування і дешифратора, вихід якого з'єднано з виходом пристрою керування, вхід схеми керування через перший елемент затримки, перший формувач і другий елемент затримки...
Демонстраційна модель мікроконтролерної системи стабілізації тиску маслостанції у системі керування роботом

Номер патенту: 24487
Опубліковано: 10.07.2007
Автори: Бялобрежський Олексій Володимирович, Ломонос Андрій Іванович, Пащенко Роман Олександрович
МПК: F04D 15/00
Мітки: мікроконтролерної, системі, маслостанції, роботом, демонстраційна, керування, модель, стабілізації, тиску
Формула / Реферат:
Демонстраційна модель мікроконтролерної системи стабілізації тиску маслостанції у системі керування роботом, що містить насосний агрегат, привідний електродвигун насосного агрегату з'єднаний з перетворювачем частоти, обчислювальний блок, блок відображення інформації, блок зв'язку виходів датчиків з обчислювальним блоком, датчики тиску і витрат встановлені на виході насосного агрегату, датчик швидкості розташований на одному валу з електричним...
Пристрій керування запуском насосного агрегату
Номер патенту: 39795
Опубліковано: 10.03.2009
Автори: Грабко Володимир Віталійович, Мошноріз Микола Миколайович
МПК: G07C 3/00
Мітки: запуском, насосного, пристрій, керування, агрегату
Формула / Реферат:
Пристрій керування запуском насосного агрегату, що містить сенсор температури навколишнього середовища, перший, другий, третій і четвертий логічні елементи І, перший та другий генератори імпульсів, перший, другий та третій цифрові компаратори, перший регістр, суматор, блок задання допустимої кількості пусків, перший, другий і третій логічні елементи АБО, блок задання витримки часу при пуску з холодного стану, перший логічний елемент АБО-НІ,...
Попередній патент: Інструмент для фінішної обробки
Наступний патент: Віброекструдер для подавання бетонних сумішей у форму
Випадковий патент: Активатор суспензії