Датчик проковзування об’єкта маніпулювання адаптивного робота
Номер патенту: 36077
Опубліковано: 10.10.2008
Автори: Кондратенко Галина Володимирівна, Марковський Ігор Володимирович, Кондратенко Юрій Пантелійович, Чернов Сергій Костянтинович, Кондратенко Володимир Юрійович
Формула / Реферат
Датчик проковзування об'єкта маніпулювання адаптивного робота, що містить корпус, в якому розміщено магнітну систему, до складу якої входить циліндричний ролик, виконаний у вигляді принаймні одного замкнутого тороїдального намагніченого магнітопроводу з нанесеним на твірну поверхню ролика захисним пружним покриттям і з можливістю обертання ролика навколо своєї осі, та закріплений на корпусі магніточутливий елемент, до складу якого входять основний та додатковий реєстратори напруженості магнітного поля, що розміщені на однаковій відстані від осі ролика в площині, яка є перпендикулярною до осі ролика, а перпендикулярні до осі ролика промені, кожний з яких проходить через відповідний реєстратор напруженості магнітного поля, утворюють між собою кут 90 градусів, при цьому виходи основного та додаткового реєстраторів напруженості магнітного поля підключено до прямих входів відповідно першого та другого суматорів, інвертовані входи яких підключено до джерела опорної напруги, виходи першого та другого суматорів підключено до входів відповідно першого та другого блоків виділення абсолютної величини, виходи яких підключено до інформаційних входів відповідно першого та другого керованих ключів, виходи яких підключено до прямих входів третього суматора, вихід другого блока виділення абсолютної величини підключено також до входу першого порогового елемента, вихід якого з'єднано з керуючим входом першого керованого ключа та входом інвертуючого елемента, вихід якого підключено до керуючого входу другого керованого ключа, вхід елемента затримки з'єднано з інвертованим входом четвертого суматора, прямий вхід якого з'єднано з виходом елемента затримки, а вихід - з входом третього блока виділення абсолютної величини, вихід якого підключено до входу другого порогового елемента, вихід якого є першим виходом датчика, який відрізняється тим, що введено третій, четвертий, п'ятий і шостий порогові елементи, п'ятий суматор, прямі входи якого підключені відповідно до виходів третього суматора та джерела опорної напруги, а вихід - до входів третього і п'ятого порогових елементів та елемента затримки, вихід якого з'єднано з входами четвертого та шостого порогових елементів, перший і другий елементи І, елемент АБО та шостий суматор, прямі входи якого підключено відповідно до виходів другого порогового елемента та входу елемента АБО, входи якого з'єднані відповідно з виходами першого та другого елементів І, виходи третього та четвертого порогових елементів підключені до відповідних входів першого елемента І, а виходи п'ятого і шостого порогових елементів - до відповідних входів другого елемента І, причому вихід шостого суматора є другим виходом датчика.
Текст
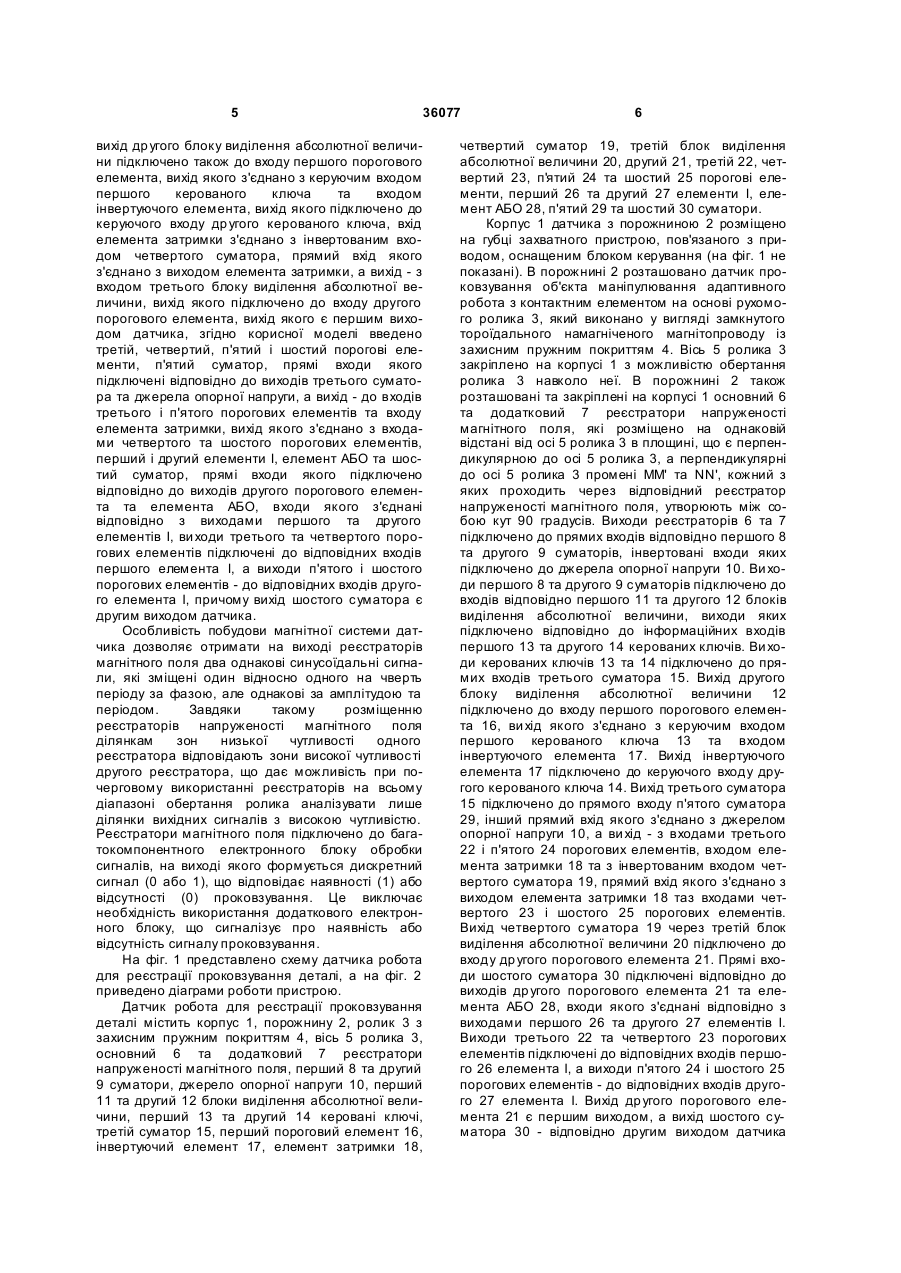
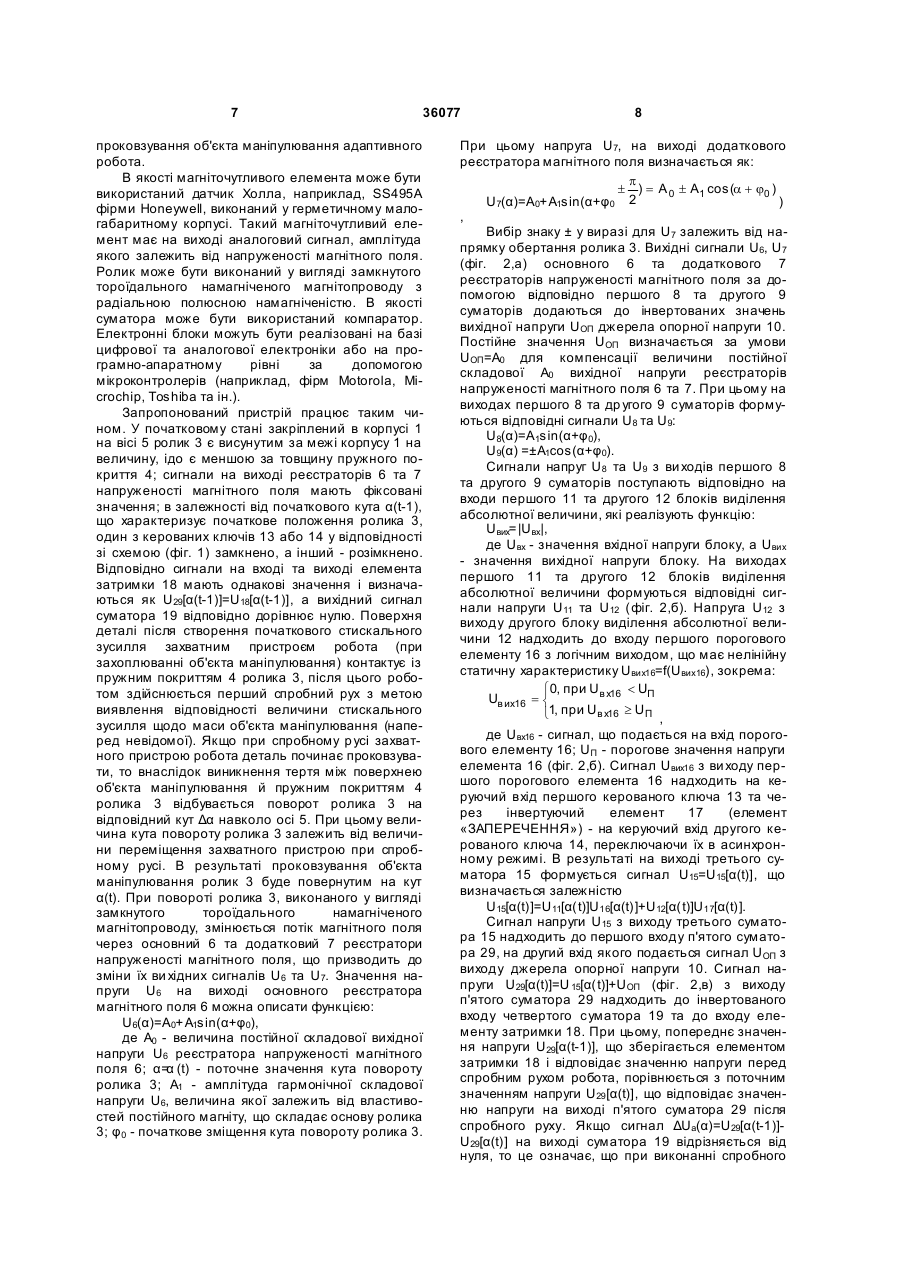
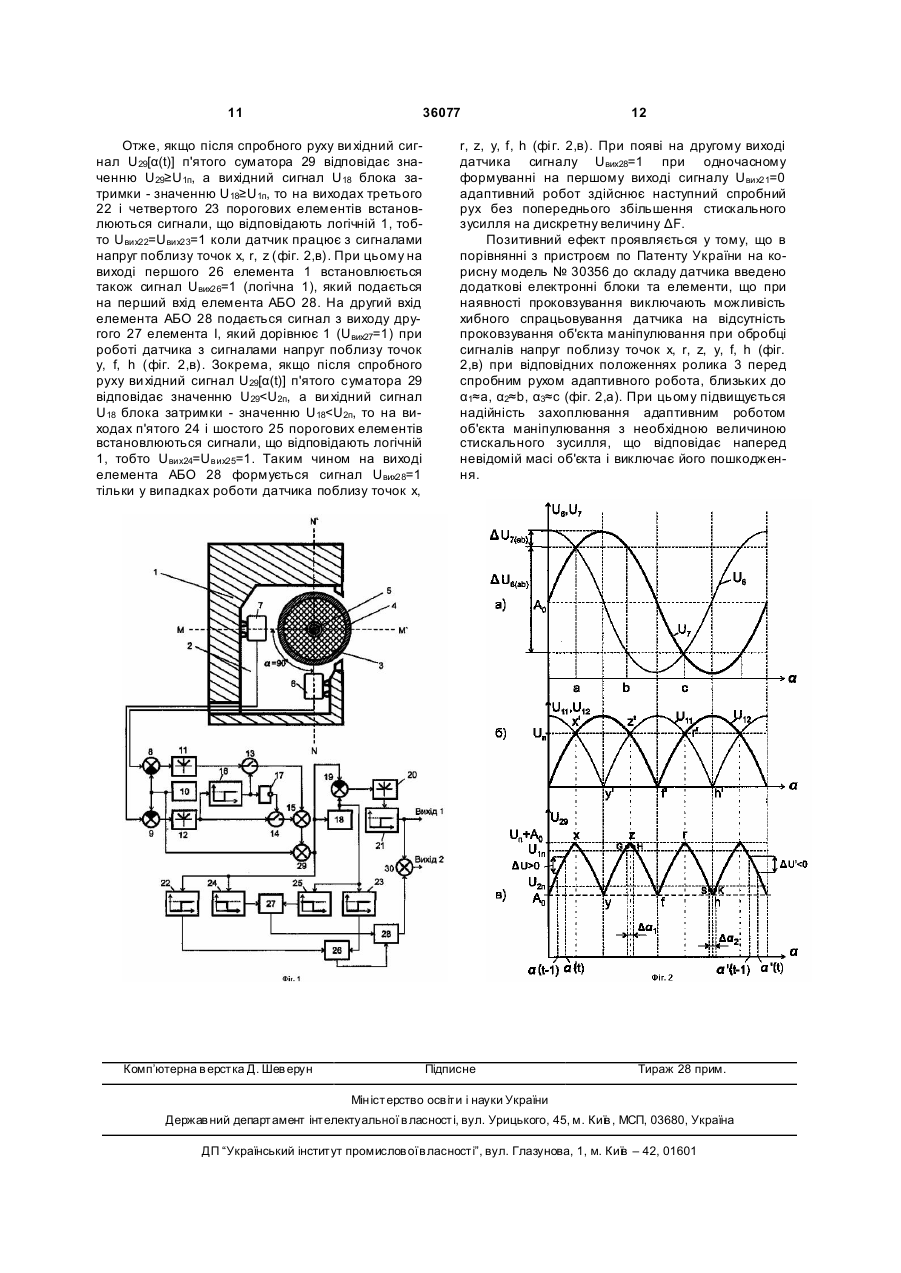
Датчик проковзування об'єкта маніпулювання адаптивного робота, що містить корпус, в якому розміщено магнітну систему, до складу якої входить циліндричний ролик, виконаний у вигляді принаймні одного замкнутого тороїдального намагніченого магнітопроводу з нанесеним на твірну поверхню ролика захисним пружним покриттям і з можливістю обертання ролика навколо своєї осі, та закріплений на корпусі магніточутливий елемент, до складу якого входять основний та додатковий реєстратори напруженості магнітного поля, що розміщені на однаковій відстані від осі ролика в площині, яка є перпендикулярною до осі ролика, а перпендикулярні до осі ролика промені, кожний з яких проходить через відповідний реєстратор напруженості магнітного поля, утворюють між собою кут 90 градусів, при цьому виходи основного та додаткового реєстраторів напруженості магнітного поля підключено до прямих входів відповідно першого та другого суматорів, інвертовані входи яких підключено до джерела опорної напруги, ви U 2 UA 1 3 36077 захватного пристрою робота і містить корпус, в якому розміщено магнітну систему. До складу магнітної системи входить циліндричний ролик та закріплений на корпусі магніточутливий елемент, до складу якого входить реєстратор напруженості магнітного поля. Ролик виконано у вигляді принаймні одного замкнутого тороїдального намагніченого магнітопроводу з нанесеним на утворюючу поверхню ролика захисним пружним покриттям і з можливістю обертання ролика навколо своєї осі [Патент України на корисну модель № 24618, МПК В25 J 19/02, 2007]. Такий датчик має наступні проблеми: - наявність періодичних зон з дуже низькою чутливістю да тчика через те, що при використанні замкнутого тороїдального намагніченого магнітопроводу з радіальною полюсною намагніченістю в якості постійного магніту (ролика) на виході датчика спостерігається синусоїдальний сигнал, який характеризується низькою швидкістю зміни значення функції навколо її екстремумів (оскільки перша похідна в цих точках дорівнює 0); - необхідність подальшої обробки вихідного сигналу датчика і прийняття додатковим пристроєм рішення про наявність сигналу проковзування. Найбільш близьким до запропонованого є датчик для реєстрації проковзування предмета [Патент України на корисну модель № 30356, МПК В25 J 19/02, 2008], що прийнятий як прототип. Датчик містить корпус, в якому розміщено магнітну систему. До складу магнітної системи входить циліндричний ролик, виконаний у вигляді принаймні одного замкнутого тороїдального намагніченого магнітопроводу з нанесеним на утворюючу поверхню ролика захисним пружним покриттям і з можливістю обертання ролика навколо своєї осі, та закріплений на корпусі магніточутливий елемент, до складу якого входить основний та додатковий реєстратори напруженості магнітного поля. Реєстратори напруженості магнітного поля розміщені на однаковій відстані від осі ролика в площині, яка є перпендикулярною до осі ролика, а перпендикулярні до осі ролика промені, кожний з яких проходить через відповідний реєстратор напруженості магнітного поля, утворюють між собою кут 90 градусів. Виходи основного та додаткового реєстраторів напруженості магнітного поля підключено до прямих входів відповідно першого та другого суматорів, інвертовані входи яких підключено до джерела опорної напруги, ви ходи першого та другого суматорів підключено до входів відповідно першого та другого блоків виділення абсолютної величини, виходи яких підключено до інформаційних входів відповідно першого та другого керованих ключів, ви ходи яких підключено до прямих входів третього суматора, вихід другого блоку виділення абсолютної величини підключено також до входу першого порогового елемента, вихід якого з'єднано з керуючим входом першого керованого ключа та входом інвертуючого елемента, вихід якого підключено до керуючого входу другого керованого ключа. Вхід елемента затримки з'єднано з виходом третього суматора та з 4 інвертованим входом четвертого суматора, прямий вхід якого з'єднано з виходом елемента затримки, а вихід - з входом третього блоку виділення абсолютної величини, вихід якого підключено до входу другого порогового елемента, вихід якого є першим виходом датчика. Такий датчик має наступні проблеми: - при наявності проковзування об'єктів маніпулювання має місце можливість хибного формування датчиком вихідних сигналів про його відсутність при обробці сигналів напруг в періодичних зонах поблизу точок переключення робочих дільниць вихідних напруг основного та додаткового реєстраторів напруженості магнітного поля; - має місце підвищення часових витрат (зниження швидкодії процесів адаптації робота до маси об'єкта маніпулювання) та/або можливість пошкодження об'єкта маніпулювання при передчасній спробі виконання адаптивним роботом необхідної маніпуляційної операції в момент хибного спрацьовування датчика проковзування при невідповідності величин стискального зусилля губок захватного пристрою і наперед невідомої маси об'єкта маніпулювання. В основу корисної моделі поставлено задачу удосконалення датчика робота для реєстрації сигналу проковзування деталі шляхом зміни конструктивного виконання датчика та введення додаткових електронних блоків обробки сигналу, що дозволить підвищити чутливість датчика проковзування в цілому, позбавитись наявності зон з низькою чутливістю та сформувати на виході датчика однозначний дискретний сигнал, що відповідає наявності або відсутності сигналу проковзування. Поставлена задача вирішується тим, що да тчик проковзування об'єкта маніпулювання адаптивного робота, що містить корпус, в якому розміщено магнітну систему, до складу якої входить циліндричний ролик, виконаний у вигляді принаймні одного замкнутого тороїдального намагніченого магнітопроводу з нанесеним на утворюючу поверхню ролика захисним пружним покриттям і з можливістю обертання ролика навколо своєї осі, та закріплений на корпусі магніточутливий елемент, до складу якого входить основний та додатковий реєстратори напруженості магнітного поля, що розміщені на однаковій відстані від осі ролика в площині, яка є перпендикулярною до осі ролика, а перпендикулярні до осі ролика промені, кожний з яких проходить через відповідний реєстратор напруженості магнітного поля, утворюють між собою кут 90 градусів, при цьому виходи основного та додаткового реєстраторів напруженості магнітного поля підключено до прямих входів відповідно першого та другого суматорів, інвертовані входи яких підключено до джерела опорної напруги, ви ходи першого та другого суматорів підключено до входів відповідно першого та другого блоків виділення абсолютної величини, виходи яких підключено до інформаційних входів відповідно першого та другого керованих ключів, виходи яких підключено до прямих входів третього суматора, 5 36077 вихід др угого блоку виділення абсолютної величини підключено також до входу першого порогового елемента, вихід якого з'єднано з керуючим входом першого керованого ключа та входом інвертуючого елемента, вихід якого підключено до керуючого входу др угого керованого ключа, вхід елемента затримки з'єднано з інвертованим входом четвертого суматора, прямий вхід якого з'єднано з виходом елемента затримки, а вихід - з входом третього блоку виділення абсолютної величини, вихід якого підключено до входу другого порогового елемента, вихід якого є першим виходом датчика, згідно корисної моделі введено третій, четвертий, п'ятий і шостий порогові елементи, п'ятий суматор, прямі входи якого підключені відповідно до виходів третього суматора та джерела опорної напруги, а вихід - до входів третього і п'ятого порогових елементів та входу елемента затримки, вихід якого з'єднано з входами четвертого та шостого порогових елементів, перший і другий елементи І, елемент АБО та шостий суматор, прямі входи якого підключено відповідно до виходів другого порогового елемента та елемента АБО, входи якого з'єднані відповідно з виходами першого та другого елементів І, ви ходи третього та четвертого порогових елементів підключені до відповідних входів першого елемента І, а виходи п'ятого і шостого порогових елементів - до відповідних входів другого елемента І, причому вихід шостого суматора є другим виходом датчика. Особливість побудови магнітної системи датчика дозволяє отримати на виході реєстраторів магнітного поля два однакові синусоїдальні сигнали, які зміщені один відносно одного на чверть періоду за фазою, але однакові за амплітудою та періодом. Завдяки такому розміщенню реєстраторів напруженості магнітного поля ділянкам зон низької чутливості одного реєстратора відповідають зони високої чутливості другого реєстратора, що дає можливість при почерговому використанні реєстраторів на всьому діапазоні обертання ролика аналізувати лише ділянки вихідних сигналів з високою чутливістю. Реєстратори магнітного поля підключено до багатокомпонентного електронного блоку обробки сигналів, на виході якого формується дискретний сигнал (0 або 1), що відповідає наявності (1) або відсутності (0) проковзування. Це виключає необхідність використання додаткового електронного блоку, що сигналізує про наявність або відсутність сигналу проковзування. На фіг. 1 представлено схему датчика робота для реєстрації проковзування деталі, а на фіг. 2 приведено діаграми роботи пристрою. Датчик робота для реєстрації проковзування деталі містить корпус 1, порожнину 2, ролик 3 з захисним пружним покриттям 4, вісь 5 ролика 3, основний 6 та додатковий 7 реєстратори напруженості магнітного поля, перший 8 та другий 9 суматори, джерело опорної напруги 10, перший 11 та другий 12 блоки виділення абсолютної величини, перший 13 та другий 14 керовані ключі, третій суматор 15, перший пороговий елемент 16, інвертуючий елемент 17, елемент затримки 18, 6 четвертий суматор 19, третій блок виділення абсолютної величини 20, другий 21, третій 22, четвертий 23, п'ятий 24 та шостий 25 порогові елементи, перший 26 та другий 27 елементи І, елемент АБО 28, п'ятий 29 та шостий 30 суматори. Корпус 1 датчика з порожниною 2 розміщено на губці захватного пристрою, пов'язаного з приводом, оснащеним блоком керування (на фіг. 1 не показані). В порожнині 2 розташовано датчик проковзування об'єкта маніпулювання адаптивного робота з контактним елементом на основі рухомого ролика 3, який виконано у вигляді замкнутого тороїдального намагніченого магнітопроводу із захисним пружним покриттям 4. Вісь 5 ролика 3 закріплено на корпусі 1 з можливістю обертання ролика 3 навколо неї. В порожнині 2 також розташовані та закріплені на корпусі 1 основний 6 та додатковий 7 реєстратори напруженості магнітного поля, які розміщено на однаковій відстані від осі 5 ролика 3 в площині, що є перпендикулярною до осі 5 ролика 3, а перпендикулярні до осі 5 ролика 3 промені ММ' та NN', кожний з яких проходить через відповідний реєстратор напруженості магнітного поля, утворюють між собою кут 90 градусів. Виходи реєстраторів 6 та 7 підключено до прямих входів відповідно першого 8 та другого 9 суматорів, інвертовані входи яких підключено до джерела опорної напруги 10. Ви ходи першого 8 та другого 9 суматорів підключено до входів відповідно першого 11 та другого 12 блоків виділення абсолютної величини, виходи яких підключено відповідно до інформаційних входів першого 13 та другого 14 керованих ключів. Ви ходи керованих ключів 13 та 14 підключено до прямих входів третього суматора 15. Вихід другого блоку виділення абсолютної величини 12 підключено до входу першого порогового елемента 16, ви хід якого з'єднано з керуючим входом першого керованого ключа 13 та входом інвертуючого елемента 17. Вихід інвертуючого елемента 17 підключено до керуючого входу другого керованого ключа 14. Вихід третього суматора 15 підключено до прямого входу п'ятого суматора 29, інший прямий вхід якого з'єднано з джерелом опорної напруги 10, а ви хід - з входами третього 22 і п'ятого 24 порогових елементів, входом елемента затримки 18 та з інвертованим входом четвертого суматора 19, прямий вхід якого з'єднано з виходом елемента затримки 18 таз входами четвертого 23 і шостого 25 порогових елементів. Вихід четвертого суматора 19 через третій блок виділення абсолютної величини 20 підключено до входу др угого порогового елемента 21. Прямі входи шостого суматора 30 підключені відповідно до виходів др угого порогового елемента 21 та елемента АБО 28, входи якого з'єднані відповідно з виходами першого 26 та другого 27 елементів І. Виходи третього 22 та четвертого 23 порогових елементів підключені до відповідних входів першого 26 елемента І, а виходи п'ятого 24 і шостого 25 порогових елементів - до відповідних входів другого 27 елемента І. Вихід др угого порогового елемента 21 є першим виходом, а вихід шостого суматора 30 - відповідно другим виходом датчика 7 36077 проковзування об'єкта маніпулювання адаптивного робота. В якості магніточутливого елемента може бути використаний датчик Холла, наприклад, SS495A фірми Honeywell, виконаний у герметичному малогабаритному корпусі. Такий магніточутливий елемент має на виході аналоговий сигнал, амплітуда якого залежить від напруженості магнітного поля. Ролик може бути виконаний у вигляді замкнутого тороїдального намагніченого магнітопроводу з радіальною полюсною намагніченістю. В якості суматора може бути використаний компаратор. Електронні блоки можуть бути реалізовані на базі цифрової та аналогової електроніки або на програмно-апаратному рівні за допомогою мікроконтролерів (наприклад, фірм Motorola, Microchip, Toshiba та ін.). Запропонований пристрій працює таким чином. У початковому стані закріплений в корпусі 1 на вісі 5 ролик 3 є висунутим за межі корпусу 1 на величину, ідо є меншою за товщину пружного покриття 4; сигнали на виході реєстраторів 6 та 7 напруженості магнітного поля мають фіксовані значення; в залежності від початкового кута α(t-1), що характеризує початкове положення ролика 3, один з керованих ключів 13 або 14 у відповідності зі схемою (фіг. 1) замкнено, а інший - розімкнено. Відповідно сигнали на вході та виході елемента затримки 18 мають однакові значення і визначаються як U29[α(t-1)]=U18[α(t-1)], а вихідний сигнал суматора 19 відповідно дорівнює нулю. Поверхня деталі після створення початкового стискального зусилля захватним пристроєм робота (при захоплюванні об'єкта маніпулювання) контактує із пружним покриттям 4 ролика 3, після цього роботом здійснюється перший спробний рух з метою виявлення відповідності величини стискального зусилля щодо маси об'єкта маніпулювання (наперед невідомої). Якщо при спробному р усі захватного пристрою робота деталь починає проковзувати, то внаслідок виникнення тертя між поверхнею об'єкта маніпулювання й пружним покриттям 4 ролика 3 відбувається поворот ролика 3 на відповідний кут Δα навколо осі 5. При цьому величина кута повороту ролика 3 залежить від величини переміщення захватного пристрою при спробному русі. В результаті проковзування об'єкта маніпулювання ролик 3 буде повернутим на кут α(t). При повороті ролика 3, виконаного у вигляді замкнутого тороїдального намагніченого магнітопроводу, змінюється потік магнітного поля через основний 6 та додатковий 7 реєстратори напруженості магнітного поля, що призводить до зміни їх ви хідних сигналів U6 та U7. Значення напруги U6 на виході основного реєстратора магнітного поля 6 можна описати функцією: U6(α)=А0+А1sin(α+φ0), де A0 - величина постійної складової вихідної напруги U6 реєстратора напруженості магнітного поля 6; α=α (t) - поточне значення кута повороту ролика 3; A1 - амплітуда гармонічної складової напруги U6, величина якої залежить від властивостей постійного магніту, що складає основу ролика 3; φ0 - початкове зміщення кута повороту ролика 3. 8 При цьому напруга U7, на виході додаткового реєстратора магнітного поля визначається як: p ± ) = A 0 ± A1 cos(a + j0 ) U7(α)=A0+A1sin(α+φ0 2 ) , Вибір знаку ± у виразі для U7 залежить від напрямку обертання ролика 3. Вихідні сигнали U6, U7 (фіг. 2,а) основного 6 та додаткового 7 реєстраторів напруженості магнітного поля за допомогою відповідно першого 8 та другого 9 суматорів додаються до інвертованих значень вихідної напруги UОП джерела опорної напруги 10. Постійне значення UОП визначається за умови UОП= А0 для компенсації величини постійної складової А0 вихідної напруги реєстраторів напруженості магнітного поля 6 та 7. При цьому на виходах першого 8 та др угого 9 суматорів формуються відповідні сигнали U8 та U9: U8(α)=A1sin(α+φ0), U9(α) =±A1cos(α+φ0). Сигнали напруг U8 та U9 з ви ходів першого 8 та другого 9 суматорів поступають відповідно на входи першого 11 та другого 12 блоків виділення абсолютної величини, які реалізують функцію: Uвих=|Uвх|, де Uвх - значення вхідної напруги блоку, a Uвих - значення вихідної напруги блоку. На виходах першого 11 та другого 12 блоків виділення абсолютної величини формуються відповідні сигнали напруги U11 та U12 (фіг. 2,б). Напруга U12 з виходу другого блоку виділення абсолютної величини 12 надходить до входу першого порогового елементу 16 з логічним виходом, що має нелінійну статичну характеристику Uвих16=f(Uвих16), зокрема: ì0, при Uв х16 0) або менше 0 ΔU'a
ДивитисяДодаткова інформація
Назва патенту англійськоюSlip sensor of object of manipulation of adaptive robot
Автори англійськоюKondratenko Yurii Panteliiovych, Kondratenko Volodymyr Yuriiovych, Markovskyi Ihor Volodymyrovych, Kondratenko Halyna Volodymyrivna, Chernov Serhii Kostiantynovych
Назва патенту російськоюДатчик проскальзывания объекта манипулирования адаптивного робота
Автори російськоюКондратенко Юрий Пантелеевич, Кондратенко Владимир Юрьевич, Марковский Игорь Владимирович, Кондратенко Галина Владимировна, Чернов Сергей Константинович
МПК / Мітки
МПК: B25J 19/02
Мітки: робота, об'єкта, датчик, адаптивного, маніпулювання, проковзування
Код посилання
<a href="https://ua.patents.su/6-36077-datchik-prokovzuvannya-obehkta-manipulyuvannya-adaptivnogo-robota.html" target="_blank" rel="follow" title="База патентів України">Датчик проковзування об’єкта маніпулювання адаптивного робота</a>
Датчик робота для реєстрації проковзування деталі
Номер патенту: 30356
Опубліковано: 25.02.2008
Автори: Кондратенко Юрій Пантелійович, Марковський Ігор Володимирович, Кондратенко Володимир Юрійович, Шишкін Олександр Сергійович, Чернов Сергій Констянтинович
МПК: B25J 19/02
Мітки: деталі, робота, датчик, реєстрації, проковзування
Формула / Реферат:
Датчик робота для реєстрації проковзування деталі, що містить корпус, в якому розміщено магнітну систему, до складу якої входить циліндричний ролик, виконаний у вигляді принаймні одного замкнутого тороїдального намагніченого магнітопроводу з нанесеним на твірну поверхню ролика захисним пружним покриттям і з можливістю обертання ролика навколо своєї осі, та закріплений на корпусі магніточутливий елемент, до складу якого входить основний...
Датчик проковзування адаптивного робота
Номер патенту: 15635
Опубліковано: 17.07.2006
Автори: Кондратенко Володимир Юрійович, Кондратенко Юрій Пантелійович, Крутських Сергій Владиславович
МПК: B25J 19/02
Мітки: адаптивного, проковзування, датчик, робота
Формула / Реферат:
Датчик проковзування адаптивного робота, що містить корпус, в якому встановлено чутливий елемент, виконаний у вигляді циліндричного ролика з можливістю повороту навколо своєї осі, робоча поверхня якого виконана з еластичного матеріалу, і систему реєстрації сигналу проковзування, який відрізняється тим, що система реєстрації сигналу проковзування виконана у вигляді двосекційного конденсатора, дві нерухомі обкладки якого через діелектрик...
Датчик для реєстрації проковзування предмета
Номер патенту: 24618
Опубліковано: 10.07.2007
Автори: Кондратенко Юрій Пантелійович, Шишкін Олександр Сергійович, Кондратенко Володимир Юрійович, Чернов Сергій Костянтинович, Марковський Ігор Володимирович
МПК: B25J 19/02
Мітки: предмета, реєстрації, датчик, проковзування
Формула / Реферат:
1. Датчик для реєстрації проковзування предмета, що містить корпус, в якому розміщено циліндричний ролик з можливістю повороту навколо своєї осі, магнітну систему на основі постійного магніта та магніточутливий елемент, який відрізняється тим, що ролик виконано у вигляді принаймні одного замкнутого тороїдального намагніченого магнітопроводу, який одночасно виконує роль постійного магніта магнітної системи, на твірну поверхню ролика нанесено...
Датчик для реєстрації проковзування з дискретним вихідним сигналом
Номер патенту: 27722
Опубліковано: 12.11.2007
Автори: Кондратенко Юрій Пантелійович, Шишкін Олександр Сергійович, Кондратенко Володимир Юрійович, Чернов Сергій Констянтинович, Марковський Ігор Володимирович
МПК: B25J 19/02
Мітки: датчик, сигналом, реєстрації, дискретним, проковзування, вихідним
Формула / Реферат:
Датчик для реєстрації проковзування з дискретним вихідним сигналом, що містить реєструвальний елемент, виконаний у вигляді принаймні одного конденсатора, та чутливий елемент, встановлений принаймні на одній з губок захватного пристрою робота, кожна з яких зв'язана із приводом їхнього переміщення, підключеним до блока керування, чутливий елемент виконаний у вигляді стрижня з наконечником, розташованого усередині основного паза конічної форми,...
Багатофункціональний кистьовий пристрій адаптивного робота
Номер патенту: 24270
Опубліковано: 25.06.2007
Автори: Марковський Ігор Володимирович, Кондратенко Володимир Юрійович, Швець Едуард Анатолійович, Кондратенко Юрій Пантелійович, Чернов Сергій Костянтинович
МПК: B25J 15/00
Мітки: кистьовий, багатофункціональний, робота, адаптивного, пристрій
Формула / Реферат:
Багатофункціональний кистьовий пристрій адаптивного робота, що містить дві пари захватних органів, основу, перший компонент головного корпусу, додатковий корпус, в якому закріплено привід захватних органів, кінематично зв'язаний з гвинтовою парою, зовнішній і внутрішній порожнинні циліндричні елементи, встановлені коаксіально гвинту гвинтової пари, та закріплений на основі перший керований фіксатор, виконаний у вигляді електромагніта, рухомий...
Попередній патент: Універсальна мікроелементна добавка на основі гідратованих і карботованих наночастинок біогенних металів
Наступний патент: Спосіб моделювання кишкової непрохідності
Випадковий патент: Пристрій для розподіляння потоку сипкого матеріалу