Багатофункціональний кистьовий пристрій адаптивного робота
Номер патенту: 24270
Опубліковано: 25.06.2007
Автори: Чернов Сергій Костянтинович, Кондратенко Володимир Юрійович, Марковський Ігор Володимирович, Кондратенко Юрій Пантелійович, Швець Едуард Анатолійович
Формула / Реферат
Багатофункціональний кистьовий пристрій адаптивного робота, що містить дві пари захватних органів, основу, перший компонент головного корпусу, додатковий корпус, в якому закріплено привід захватних органів, кінематично зв'язаний з гвинтовою парою, зовнішній і внутрішній порожнинні циліндричні елементи, встановлені коаксіально гвинту гвинтової пари, та закріплений на основі перший керований фіксатор, виконаний у вигляді електромагніта, рухомий якір якого є підпружиненим штирьовим елементом, кожний захватний елемент першої пари захватних органів за допомогою відповідної пари паралельних тяг кінематично зв'язано з гайкою гвинтової пари, а кожний захватний елемент другої пари захватних органів з внутрішнім циліндричним елементом, в одній з тяг кожної пари паралельних тяг виконано паз у вигляді прорізу, у якому розташовано напрямний штир, який змонтовано для паралельних тяг першої пари захватних органів - на першому компоненті головного корпусу, а для паралельних тяг другої пари захватних органів - на зовнішньому циліндричному елементі, при цьому в першому компоненті головного корпусу й у зовнішньому циліндричному елементі виконано пази у вигляді прорізів для проходу відповідно першої та другої пари захватних органів й обидва циліндричні елементи споряджені відповідними пружними елементами, на непідпружиненій торцевій поверхні внутрішнього циліндричного елемента виконано отвір для проходу вала приводу з гвинтом гвинтової пари, на торцевій поверхні першого компонента головного корпусу, що контактує з першим керованим фіксатором, виконано принаймні одне заглиблення для фіксації штирьового елемента першого керованого фіксатора, додатковий корпус встановлено з можливістю зворотно-поступального руху, а перший компонент головного корпусу - з можливістю обертальногоруху в порожнині основи, який відрізняється тим, що введено другий керований фіксатор та керовану електромагнітну муфту, яка зв'язує гвинт гвинтової пари з підпружиненою торцевою поверхнею внутрішнього циліндричного елемента, а головний корпус виконано двокомпонентним, другий компонент головного корпусу встановлено з можливістю обертального руху в порожнині першого компонента, причому повздовжні осі обертання обох компонентів головного корпусу співпадають з віссю обертання гвинта гвинтової пари, гайка якої встановлена в порожнині першого компонента головного корпуса, а зовнішній і внутрішній порожнинні циліндричні елементи – в порожнині другого компонента головного корпусу, в якому виконано пази у вигляді прорізів для проходу другої пари захватних органів, на відповідних торцевих поверхнях першого та другого компонентів головного корпусу виконано отвори для проходу вала приводу з гвинтом гвинтової пари, пружні елементи закріплені на безотвірній торцевій поверхні другого компонента, а другий керований фіксатор - на першому компоненті головного корпуса, на торцевій поверхні другого компонента головного корпусу, що контактує з другим керованим фіксатором, виконано ряд розташованих по колу заглиблень для фіксації штирьового елемента другого керованого фіксатора.
Текст
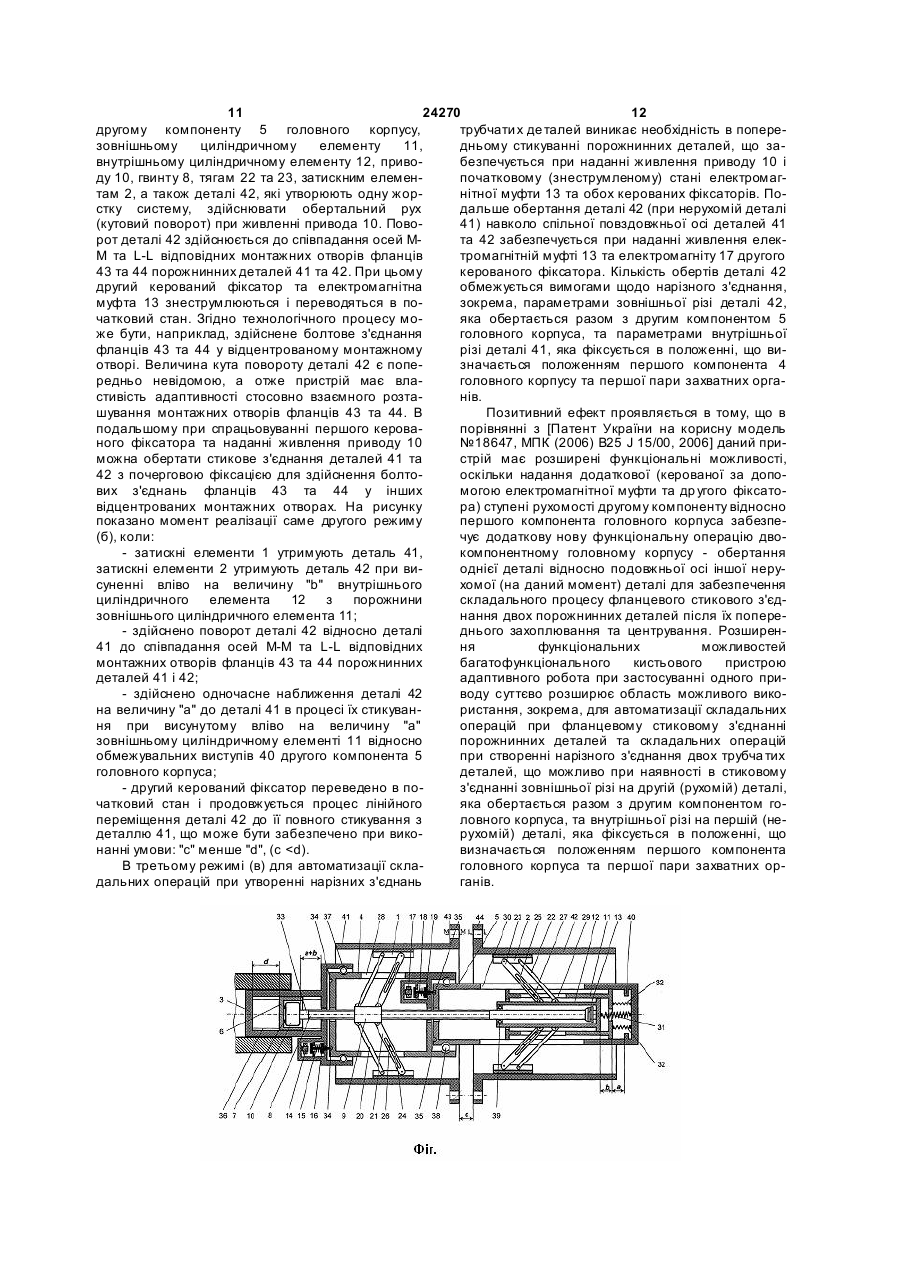
Багатофункціональний кистьовий пристрій адаптивного робота, що містить дві пари захватних органів, основу, перший компонент головного корпусу, додатковий корпус, в якому закріплено привід захватних органів, кінематично зв'язаний з гвинтовою парою, зовнішній і внутрішній порожнинні циліндричні елементи, встановлені коаксіально гвинту гвинтової пари, та закріплений на основі перший керований фіксатор, виконаний у вигляді електромагніта, рухомий якір якого є підпружиненим штирьовим елементом, кожний захва тний елемент першої пари захватних органів за допомогою відповідної пари паралельних тяг кінематично зв'язано з гайкою гвинтової пари, а кожний захватний елемент другої пари захватних органів з внутрішнім циліндричним елементом, в одній з тяг кожної пари паралельних тяг виконано паз у вигляді прорізу, у якому розташовано напрямний штир, який змонтовано для паралельних тяг першої пари захватних органів - на першому компоненті головного корпусу, а для паралельних тяг другої пари захватних органів - на зовнішньому циліндричному елементі, при цьому в першому компоненті головного корпусу й у зовнішньому циліндричному елементі виконано пази у вигляді прорізів для проходу відповідно першої та другої пари захватних органів й обидва циліндричні еле U 2 (19) 1 3 24270 4 строї роботів, які забезпечують на основі викорисментом. Кожна губка одного із захватних органів тання двох пар захватних органів автоматизацію кінематично зв'язана з гайкою гвинтової пари папроцесів захоплювання двох деталей та відповідрою паралельних тяг, в одній з яких виконано паз, ну їх орієнтацію. В цих пристроях використоу якому розташовано додатковий штир, змонтовавується один привід для переміщення окремих ний на першому компоненті головного корпуса, а затискних елементів губок різних захватних оркожний захватний елемент іншого захватного органів та система керованих фіксаторів електрогану кінематично пов'язаний із внутрішнім магнітного типу для управління відповідними стуциліндричним порожнинним елементом парою пенями рухомості. Прикладом такого пристрою є паралельних тяг, в одній з яких виконано паз, у багатофункціональний кистьовий пристрій робота, якому розташовано додатковий штир, змонтоващо містить основу та головний корпус, привід заний на зовнішньому циліндричному елементі. Дохва тних органів, кінематично зв'язаний з гвинтодатковий корпус встановлено з можливістю звовою парою, зовнішній і внутрішній порожні ротно-поступального руху, а перший компонент циліндричні елементи, встановлені коаксиально головного корпуса - з можливістю обертального валу гвинтової пари, дві пари захватних органів, руху в порожнині основи. При цьому в першому один з яких пов'язаний з гайкою гвинтової пари, а компоненті головного корпуса та в циліндричних інший - з внутрішнім циліндричним елементом, елементах виконано пази для проходу паралелькожна губка одного із захватних органів них тяг захватних органів, обидва циліндричні кінематично зв'язана з гайкою гвинтової пари паелементи підпружинено щодо першого компонента рою паралельних тяг, в одній з яких виконано паз, головного корпуса, а на непідпружиненій торцевій у якому розташовано додатковий штир, змонтоваповерхні внутрішнього циліндричного елемента ний на головному корпусі, а кожний захватний виконано отвір, через який вал привода зв'язаний елемент іншого захватного органу кінематично з гвинтом гвинтової пари. На відповідній торцевій пов'язаний із внутрішнім порожнинним елементом поверхні першого компонента головного корпуса парою паралельних тяг, в одній з яких виконано виконано, принаймні, одне заглиблення для паз, у якому розташовано додатковий штир, змонфіксації штирьового елемента першого керованого тований на зовнішньому циліндричному елементі. фіксатора, що закріплений на основі. Такий багаПри цьому в головному корпусі та в циліндричних тофункціональний кистьовий пристрій робота має елементах виконано пази для проходу паралельпроблеми, що пов'язані з відсутністю можливості них тяг захватних органів і обидва циліндричні надання приводом захватних органів обертальноелементи підпружинено щодо головного корпуса го руху одному з порожнинних елементів відносно [а.с. СРСР №1712142, кл. В25 J 15/00, 1992]. Таіншого, наприклад при автоматизації технокий багатофункціональний кистьовий пристрій рологічних операцій з фланцевими трубчатими елебота має проблеми, що пов'язані з відсутністю ментами, що попередньо захоплюються можливості надання приводом захватних органів відповідними захватними органами, центруються обертального руху двом порожнинним, наприклад відносно спільної подовжньої осі, наближаються трубчатим елементам, що попередньо захоплюодин до одного для стикування фланців (з ються відповідними захватними органами, ценвідповідними монтажними отворами для болтових труються відносно спільної подовжньої осі та наз'єднань) та можуть здійснювати (при неближаються один до одного до повного стикування обхідності) спільний обертальний рух. Такий непорожнинних елементів. Такий недолік суттєво долік суттєво обмежує область застосування багаобмежує область застосування багатотофункціонального кистьового пристрою робота, функціонального кистьового пристрою робота, зокрема, для автоматизації складальних процесів, зокрема, для автоматизації зварювальних прооскільки при фланцевому з'єднанні двох порожцесів, оскільки при зварюванні двох порожнинних нинних трубча тих елементів промисловому роботу елементів промисловому роботу необхідно необхідно здійснювати обертальний рух однієї здійснювати обертальний рух стикового з'єднання деталі відносно іншої для досягнення співосності відносно зварювального пристрою, що не може монтажних отворів відповідних фланців стикового бути забезпечено пристроєм-аналогом згідно його з'єднання трубчатих елементів (компонентів склаконструктивних особливостей. дальної операції), що не може бути забезпечено Найбільш близьким аналогом є багатопристроєм-прототипом згідно його конструктивних функціональний кистьовий пристрій робота [Паособливостей. тент України на корисну модель №18647, МПК В основу корисної моделі поставлено задачу (2006) В25 J 15/00, 2006], що прийнятий як протоудосконалення багатофункціонального кистьового тип. Такий багатофункціональний кистьовий пристрою робота з наданням йому адаптивних пристрій робота містить основу, перший комповластивостей шляхом конструктивного виконання нент головного корпуса, додатковий корпус, в якоголовного корпуса з двох компонентів та надання му встановлено кінематично зв'язаний з гвинтовою можливості здійснення обертального руху другим парою привід захватних органів, зовнішній і компонентом в порожнині першого компонента внутрішній порожнинні циліндричні елементи, головного корпуса, введення в конструкцію керовстановлені коаксиально валу гвинтової пари, дві ваної електромагнітної муфти та другого керовапари захватних органів, один з яких пов'язаний з ного електромагнітного фіксатора, що порціонують гайкою гвинтової пари, а інший - з внутрішнім (обмежують) обертальний рух (кут повороту) друциліндричним елементом, та виконаний у вигляді гого компонента головного корпусу відносно електромагніта перший керований фіксатор, рухофіксованого положення першого компонента гомий якір якого є підпружиненим штирьовим елеловного корпуса в маніпуляторі робота при 5 24270 6 здійсненні процесу адаптивного настроювання гвинтом гвинтової пари, пружні елементи положення другої тр убчатої деталі відносно перзакріплені на безотвірній торцевій поверхні другошої для досягнення співосності монтажних отворів го компонента, а другий керований фіксатор - на складальних фланців, що призводить до розшипершому компоненті головного корпусу, на торрення функціональних можливостей та області цевій поверхні другого компонента головного корзастосування багатофункціонального кистьового пусу, що контактує з другим керованим пристрою адаптивного робота. фіксатором, виконано ряд розташованих по колу Поставлена задача вирішується тим, що в зазаглиблень для фіксації штирьового елемента пропонованому багатофункціональному кистьоводругого керованого фіксатора. му пристрої адаптивного робота, який містить дві Винахідницький рівень забезпечується введепари захватних органів, основу, перший компонент ними конструктивними удосконаленнями, що наголовного корпуса, додатковий корпус, в якому дають можливість при використанні одного привозакріплено кінематично зв'язаний з гвинтовою паду захоплювати, центрувати, стикува ти рою привід захватних органів, зовнішній і порожнинні деталі, забезпечувати обертальний внутрішній порожнинні циліндричні елементи, рух стикового з'єднання порожнинних елементів, а встановлені коаксиально гвинту гвинтової пари, та також адаптивну орієнтацію однієї деталі відносно закріплений на основі перший керований фіксатор, іншої за рахунок забезпечення можливості пововиконаний у вигляді електромагніта, рухомий якір роту відповідної деталі відносно іншої при спраякого є підпружиненим штирьовим елементом, цьовуванні керованої електромагнітної муфти, що кожний захватний елемент першої пари захватних призводить до передачі обертального руху гвинта органів за допомогою відповідної пари паралельгвинтової пари другій парі захватних елементів з них тяг кінематично зв'язано з гайкою гвинтової відповідною деталлю, та при спрацьовуванні друпари, а кожний захватний елемент другої пари гого керованого фіксатора, що призводить до визахватних органів - з внутрішнім циліндричним ведення штирьового елемента, розташованого на елементом, в одній з тяг кожної пари паралельних першому компоненті головного корпусу багатофутяг виконано паз у вигляді прорізу, у якому розтанкціонального кистьового пристрою робота, з відшовано напрямний штир, який змонтовано для повідного заглиблення на торцевій поверхні другопаралельних тяг першої пари захватних органів го компонента головного корпусу. на першому компоненті головного корпуса, а для В результаті досягаються нові функціональні паралельних тяг др угої пари захватних органів - на можливості, що пов'язані з розширенням переліку зовнішньому циліндричному елементі, при цьому в операцій, які можуть здійснюватися багатофункціпершому компоненті головного корпуса й у ональним кистьовим пристроєм робота, зокрема зовнішньому циліндричному елементі виконано забезпеченням операцій захоплювання порожнинпази у вигляді прорізів для проходу відповідно них елементів, центрування, стискування, надання першої та другої пари захватних органів й обидва стиковому з'єднанню обертального руху та наданциліндричні елементи споряджені відповідними ня можливості адаптивної кутової орієнтації рухопружними елементами, на непідпружиненій тормої деталі стикового з'єднання відносно нерухоцевій поверхні внутрішнього циліндричного елемої. мента виконано отвір для проходу вала привода з На рисунку (Фіг.) показано робочий стан багагвинтом гвинтової пари, на торцевій поверхні пертофункціонального кистьового пристрою адаптившого компонента головного корпуса, що контактує ного робота при центруванні, стикуванні порожз першим керованим фіксатором, виконано, прининних деталей та повороті однієї деталі відносно наймні, одне заглиблення для фіксації штирьового іншої, зокрема зображено фрагмент роботи багаелемента першого керованого фіксатора, додаттофункціонального кистьового пристрою адаптивковий корпус встановлено з можливістю зворотноного робота, коли обидва захватні органи захопипоступального руху, а перший компонент головноли за внутрішню поверхню відповідні порожнинні го корпуса - з можливістю обертального руху в деталі, здійснено центрування деталей та адаптипорожнині основи, згідно корисної моделі введено вна кутова орієнтація (поворот) другої деталі віддругий керований фіксатор та керовану електроносно першої до моменту співпадання осей монмагнітну муфту, яка зв'язує гвинт гвинтової пари з тажних отворів складальних фланців обох підпружиненою торцевою поверхнею внутрішнього порожнинних деталей з подальшою фіксацією доциліндричного елемента, а головний корпус викосягнутої орієнтації деталей за рахунок розташунано двокомпонентним, другий компонент головвання штирьового елемента другого керованого ного корпуса встановлено з можливістю обертальфіксатора в відповідному заглибленні на торцевій ного руху в порожнині першого компонента, поверхні другого компонента головного корпусу. причому повздовжні осі обертання обох компоБагатофункціональний кистьовий пристрій нентів головного корпуса співпадають з віссю адаптивного робота містить дві пари захватних обертання гвинта гвинтової пари, гайка якої встаорганів з відповідними затискними елементами 1 новлена в порожнині першого компонента головта 2, основу 3, двокомпонентний головний корпус з ного корпуса, а зовнішній і внутрішній порожнинні першим 4 та другим 5 компонентами, додатковий циліндричні елементи - в порожнині другого комкорпус 6, в якому за допомогою амортизувальних понента головного корпусу, в якому виконано пази кріплень 7 закріплено кінематично зв'язаний з у вигляді прорізів для проходу другої пари захватгвинтовою парою "гвинт 8 - гайка 9" привід 10 заних органів, на відповідних торцевих поверхнях хва тних органів, зовнішній 11 і внутрішній 12 попершого та другого компонентів головного корпусу рожнинні циліндричні елементи, електромагнітну виконано отвори для проходу вала привода з муфту 13, перший керований фіксатор, виконаний 7 24270 8 у вигляді електромагніта 14, рухомий якір якого є закріплена в порожнині внутрішнього 12 підпружиненим за допомогою пружини 15 штирьоциліндричного порожнинного елемента за допомовим елементом 16, та другий керований фіксатор, гою підшипника 39. В другому компоненті 5 головвиконаний у вигляді електромагніта 17, рухомий ного корпуса виконано обмежувальні виступи 40 якір якого є підпружиненим за допомогою пружини для фіксації положення циліндричних елементів 18 штирьовим елементом 19. Зовнішній 11 і 11 та 12 при відключеному приводі 10 захватних внутрішній 12 порожнинні циліндричні елементи органів. встановлені коаксиально гвинту 8 гвинтової пари в Запропонований пристрій працює таким чипорожнині другого компонента 5 головного корпуном. У початковому положенні привід 10 захватних са. Кожний затискний елемент 1 першої пари заорганів відключено, пара затискних губок 1 прихва тних органів за допомогою пари паралельних тиснута до першого компонента 4 головного кортяг 20 та 21 кінематично зв'язаний з гайкою 9 гвинпуса, пара затискних губок 2 притиснута до друготової пари, розташованої в порожнині першого го компонента 5 головного корпуса, зовнішній 11 компонента 4 головного корпуса, а кожний захватта внутрішній 12 циліндричні елементи притиснуті ний елемент 2 другої пари захватних органів - з до обмежувальних виступів 40 другого компонента внутрішнім циліндричним елементом 12 за допо5 головного корпусу під дією пружин 32 та 31 могою відповідної пари паралельних тяг 22 та 23. відповідно, гайка 9 розташована в крайньому В одній з відповідних тяг 21, 23 кожної пари паралівому положенні. Керована електромагнітна муфлельних тяг виконано відповідні пази 24, 25 у вита 13 знаходиться в розімкненому стані, тобто гляді прорізу. В кожному пазу 24 першої пари загвинт 8 роз'єднаний з підпружиненою торцевою хва тних органів розташовано напрямний штир 26, поверхнею другого компонента 5 головного корпуякий змонтовано відповідно на першому компоса. Перший і другий керовані фіксатори знахоненті 4 головного корпуса. В кожному пазу 25 друдиться в початковому стані, тобто електромагніти гої пари захватних органів розташовано напрям14 і 17 є знеструмленими, а штирьові елементи 16 ний штир 27, який змонтовано відповідно на та 19 під дією відповідних пружин 15 та 18 утризовнішньому 11 циліндричному елементі. Для промуються, відповідно, в заглибленні 34 першого ходу паралельних тяг 20 та 21 першої пари закомпонента 4 головного корпуса та в заглибленні хва тних органів виконано пази 28 у вигляді 35 другого компонента 5 головного корпуса, прорізів в першому компоненті 4 головного корпуфіксуючи одночасно нерухоме положення основи са. Для проходу паралельних тяг 22 та 23 другої 3, першого 4 та другого 5 компонентів головного пари захватних органів виконано пази 29 та 30 у корпуса відносно маніпулятора робота. Робот певигляді прорізів, відповідно, у зовнішньому 11 реміщує багатофункціональний кистьовий пристрій циліндричному елементі та в другому компоненті 5 таким чином, щоб затискні елементи 1 першого головного корпуса. Одна з торцевих поверхонь захватного органа розташовувалися в порожнині внутрішнього 12 циліндричного елемента зв'язана трубчатої деталі 41, призначеної для захоплюванз другим компонентом 5 головного корпуса за доня. При включенні приводу 10 гвинт 8 обертається помогою пружини 31, а одна з торцевих поверхонь проти годинникової стрілки, а гайка 9 зміщується зовнішнього 11 циліндричного елемента - за довправо по гвинту 8. Шарнірно закріплені на гайці 9 помогою пружин 32. Керована електромагнітна тяги 20, 21 повертаються щодо відповідних намуфта 13 зв'язує гвинт 8 гвинтової пари з прямних штирів 26 й одночасно висуваються з підпружиненою торцевою поверхнею внутрішнього пазів 28. Необхідне переміщення тяг 20, 21 забез12 циліндричного елемента, на непідпружиненій печується взаємодією відповідних пазів 24 і наторцевій поверхні якого, як і на відповідних торцепрямних штирів 26, забезпечуючи висування кожвих поверхнях першого 4 та другого 5 компонентів ного затискного елемента 1 першого захватного головного корпуса, виконано отвір для проходу органа. Висування затискних елементів 1 буде вала 33 привода 10, зв'язаного з гвинтом 8 гвинтовідбуватися до ти х пір, поки вони не торкнуться вої пари. На відповідній торцевій поверхні першого стінок порожнинної деталі 41 (показано на рисункомпонента 4 головного корпуса виконано, прику), при цьому гайка 9 зупиниться й буде наймні, одне заглиблення 34 для фіксації штирьофіксованою в даному положенні. Система керувого елемента 16 першого керованого фіксатора, вання робота (на рисунку не показана), забезпезакріпленого на основі 3. На торцевій поверхні чивши створення першим захватним органом недругого компонента 5 головного корпуса, що конобхідного стискального зусилля, відключає привід тактує з закріпленим на першому компоненті 4 5. На наступному етапі робот переміщує багатоголовного корпуса другим керованим фіксатором, функціональний кистьовий пристрій з деталлю 41 виконано ряд розташованих по колу заглиблень 35 таким чином, щоб затискні елементи 2 другого для фіксації штирьового елемента 19 другого кезахватного органа перебували в порожнині іншої рованого фіксатора. Додатковий корпус 6 встадеталі 42. При цьому надається живлення приводу новлено з можливістю зворотно-поступального 10, що забезпечує обертання гвинта 8 гвинтової руху в порожнині основи 3 за допомогою напрямпари проти годинникової стрілки. Оскільки гайка 9 них 36, перший компонент 4 головного корпуса - з знаходиться в фіксованому положенні, то гвинт 8, можливістю обертального руху навколо осі оберкінематично зв'язаний з валом 33 привода 10, ратання гвинта 8 при використанні кулькового зом з приводом 10 і додатковим корпусом 6 почипідшипника 37, а другий компонент 5 головного нає переміщатися вліво щодо гайки 9. Внутрішній корпуса - з можливістю обертального руху навколо циліндричний елемент 12 починає висуватися з осі обертання гвинта 8 при використанні кульковопорожнини зовнішнього циліндричного елемента го підшипника 38. Гвинтова пара “гвинт 8 - гайка 9" 11, тобто починає переміщува тися вліво, розтя 9 24270 10 гуючи пружину 31. Зв'язані із внутрішнім вання й стикування порожнинних деталей 41 й 42. циліндричним елементом 12 тяги 22, 23 також При спрацьовуванні першого керованого почнуть повертатися відносно відповідних нафіксатора, тобто при наданні живлення електропрямних штирів 27 й одночасно висуватися з пазів магніту 14 першого керованого фіксатора, рухомий 29, 30. Переміщення тяг 22, 23 здійснюється при якір притягується, а штирьовий елемент 16 взаємодії відповідних пазів 25 і напрямних штирів відповідно переміщується вліво і виходить із за27, забезпечуючи висування кожного затискного глиблення 34, розфіксовуючи основу 3 і перший елемента 2 другого захватного органа, що буде компонент 4 головного корпуса. Цим надається відбуватися доти, поки затискні елементи 2 не можливість двокомпонентному головному корпусу, торкнуться стінок порожнинної деталі 42 (показано зовнішньому циліндричному елементу 11, на рисунку), фіксуючи положення внутрішнього внутрішньому циліндричному елементу 12, привоциліндричного елемента 12 відносно зовнішнього ду 10, гвинту 8, тягам 20, 21, 22 та 23, затискним циліндричного елемента 11. При цьому одночасно елементам 1 і 2, а також деталям 41 і 42, які утвоз процесом захоплювання порожнинної деталі 42 рюють одну жорстку систему, здійснювати обервідбувається її центрування відносно подовжньої тальний рух при наданні в подальшому живлення осі пристрою, що призводить до співпадання на приводу 10. Багатофункціональний кистьовий кінцевому етапі подовжніх осей порожнинних депристрій адаптивного робота може працювати у талей 41, 42. Система керування робота, забезперізних положеннях: вертикальному, горизонтальчивши створення другим захватним органом неному, з нахилом. Після виконання технологічної обхідного стискального зусилля, відключає привід операції над стиковим з'єднанням порожнинних 5. Після цього робот переміщує багатодеталей 41 й 42 відключається живлення від прифункціональний кистьовий пристрій з затиснутими вода 10 та електромагніта 14, якір якого за доподеталями 41 й 42 у зону виконання технологічної могою пружин 15 повертається у початкове полооперації складання, зварювання тощо. В подальження, при цьому штирьовий елемент 16 входить шому при наданні живлення приводу 10 гвинт 8 в заглиблення 34, фіксуючи основу 3 та всю жорбуде переміщуватися в зафіксованій гайці 9, при стку систему, пов'язану з першим компонентом 4 цьому разом з внутрішнім циліндричним елеменголовного корпуса, і припиняється обертальний том 12 починає переміщуватися вліво в порожнині рух всієї жорсткої системи. На наступному етапі другого компонента 5 головного корпуса зовнішній робот переміщує багатофункціональний кистьовий циліндричний елемент 11, розтягуючи пружини 32. пристрій до накопичувача (не показаний на рисунРух зовнішнього циліндричного елемента 11 заку) готови х де талей. Привід 10 включається на безпечується взаємодією пазів 25 та напрямних обертання за годинниковою стрілкою (реверс). штирів 27. Таким чином, вліво, як одна жорстка При цьому гвинт 8 разом з додатковим корпусом 6 система, будуть переміщуватися зовнішній та зовнішнім 11 і внутрішнім 12 циліндричними циліндричний елемент 11, внутрішній елементами буде переміщуватися вправо циліндричний елемент 12, привід 10, додатковий відносно гайки 7. Затискні елементи 2 будуть втякорпус 6 (по напрямним 36), гвинт 8, тяги 22, 23, гуватися, а пружини 31, 32 - стискатися. Коли затискні елементи 2, а також порожнинна деталь зовнішній 11 і внутрішній 12 циліндричні елементи 42. В подальшому в залежності від вимог технозаймуть початкове положення при контакті з облогічного процесу багатофункціональний кистьомежувальними виступами 40, а затискні елементи вий пристрій адаптивного робота може працювати 2 другого захватного органа будуть щільно прив одному з наступних трьох режимів: а) стикування тиснуті до другого компонента 5 головного корпусу порожнинних деталей з подальшим обертанням (початковий стан затискних елементів 2 другого (поворотом) стикового з'єднання навколо спільної захватного органа), то починається рух вліво гайки повздовжньої осі деталей 41 та 42 (для автомати9 вподовж гвинта 8. Цим забезпечується втягуванзації зварювальних операцій); б) керований для ня затискних елементів 1 і притиснення їх до пернеобхідної орієнтації поворот деталі 42 навколо шого компоненту 4 головного корпусу (початковий спільної повздовжньої осі деталей 41 та 42 (при стан затискних елементів 1 першого захватного нерухомій деталі 41) з одночасним стикуванням органа). Після цього привід 10 відключається і ропорожнинних деталей 41 та 42 та з подальшим бот виводить багатофункціональний кистьовий поворотом стикового з'єднання навколо повздовжпристрій з готової деталі. ньої осі деталей (для автоматизації складальних В другому режимі (б) виникає необхідність не операцій при фланцевих з'єднаннях трубча тих тільки в стикуванні центрованих деталей 41 та 42 деталей); в) стикування порожнинних деталей з шляхом переміщення деталі 42, а й у одночасній подальшим обертанням деталі 42 (при нерухомій адаптивній орієнтації (кутовому повороті) деталі 42 деталі 41) навколо спільної повздовжньої осі девідносно нерухомої деталі 41. Цей режим забезпеталей 41 та 42 (для автоматизації складальних чується надсиланням керуючих сигналів до елекоперацій при нарізних з'єднаннях трубчати х детатромагнітної муфти 13 і другого фіксатора. При лей). спрацьовуванні другого керованого фіксатора, В першому режимі (а) переміщення деталі 42 тобто при наданні живлення електромагніту 17 буде відбуватися до ти х пір, поки вона не другого керованого фіксатора, рухомий якір притязістикується з деталлю 41 при утворенні стикового гується, а штирьовий елемент 19 відповідно пез'єднання двох деталей 41, 42. Привід 10 при цьореміщується вліво і ви ходить із заглиблення 35, му відключається. Оскільки дві пари тяг 20, 21 й розфіксовуючи перший компонент 4 і другий ком22, 23, а також дві пари затискних елементів 1, 2 є понент 5 головного корпуса. Цим при ввімкненні симетричними, то забезпечується надійне центруелектромагнітної муфти 13 надається можливість 11 24270 12 другому компоненту 5 головного корпусу, трубчати х де талей виникає необхідність в поперезовнішньому циліндричному елементу 11, дньому стикуванні порожнинних деталей, що завнутрішньому циліндричному елементу 12, привобезпечується при наданні живлення приводу 10 і ду 10, гвинту 8, тягам 22 та 23, затискним елеменпочатковому (знеструмленому) стані електромагтам 2, а також деталі 42, які утворюють одну жорнітної муфти 13 та обох керованих фіксаторів. Постку систему, здійснювати обертальний рух дальше обертання деталі 42 (при нерухомій деталі (кутовий поворот) при живленні привода 10. Пово41) навколо спільної повздовжньої осі деталей 41 рот деталі 42 здійснюється до співпадання осей Мта 42 забезпечується при наданні живлення елекМ та L-L відповідних монтажних отворів фланців тромагнітній муфті 13 та електромагніту 17 другого 43 та 44 порожнинних деталей 41 та 42. При цьому керованого фіксатора. Кількість обертів деталі 42 другий керований фіксатор та електромагнітна обмежується вимогами щодо нарізного з'єднання, муфта 13 знеструмлюються і переводяться в позокрема, параметрами зовнішньої різі деталі 42, чатковий стан. Згідно технологічного процесу мояка обертається разом з другим компонентом 5 же бути, наприклад, здійснене болтове з'єднання головного корпуса, та параметрами внутрішньої фланців 43 та 44 у відцентрованому монтажному різі деталі 41, яка фіксується в положенні, що виотворі. Величина кута повороту деталі 42 є попезначається положенням першого компонента 4 редньо невідомою, а отже пристрій має влаголовного корпусу та першої пари захватних оргастивість адаптивності стосовно взаємного розтанів. шування монтажних отворів фланців 43 та 44. В Позитивний ефект проявляється в тому, що в подальшому при спрацьовуванні першого керовапорівнянні з [Патент України на корисну модель ного фіксатора та наданні живлення приводу 10 №18647, МПК (2006) В25 J 15/00, 2006] даний приможна обертати стикове з'єднання деталей 41 та стрій має розширені функціональні можливості, 42 з почерговою фіксацією для здійснення болтооскільки надання додаткової (керованої за допових з'єднань фланців 43 та 44 у інших могою електромагнітної муфти та др угого фіксатовідцентрованих монтажних отворах. На рисунку ра) ступені рухомості другому компоненту відносно показано момент реалізації саме другого режиму першого компонента головного корпуса забезпе(б), коли: чує додаткову нову функціональну операцію дво- затискні елементи 1 утримують деталь 41, компонентному головному корпусу - обертання затискні елементи 2 утримують деталь 42 при виоднієї деталі відносно подовжньої осі іншої нерусуненні вліво на величину "b" внутрішнього хомої (на даний момент) деталі для забезпечення циліндричного елемента 12 з порожнини складального процесу фланцевого стикового з'єдзовнішнього циліндричного елемента 11; нання двох порожнинних деталей після їх попере- здійснено поворот деталі 42 відносно деталі днього захоплювання та центрування. Розширен41 до співпадання осей М-М та L-L відповідних ня функціональних можливостей монтажних отворів фланців 43 та 44 порожнинних багатофункціонального кистьового пристрою деталей 41 і 42; адаптивного робота при застосуванні одного при- здійснено одночасне наближення деталі 42 воду суттєво розширює область можливого викона величину "а" до деталі 41 в процесі їх стикуванристання, зокрема, для автоматизації складальних ня при висунутому вліво на величину "а" операцій при фланцевому стиковому з'єднанні зовнішньому циліндричному елементі 11 відносно порожнинних деталей та складальних операцій обмежувальних виступів 40 другого компонента 5 при створенні нарізного з'єднання двох трубча тих головного корпуса; деталей, що можливо при наявності в стиковому - другий керований фіксатор переведено в поз'єднанні зовнішньої різі на другій (рухомій) деталі, чатковий стан і продовжується процес лінійного яка обертається разом з другим компонентом гопереміщення деталі 42 до її повного стикування з ловного корпуса, та внутрішньої різі на першій (недеталлю 41, що може бути забезпечено при викорухомій) деталі, яка фіксується в положенні, що нанні умови: "с" менше "d", (с
ДивитисяДодаткова інформація
Назва патенту англійськоюMultifunctional hand device of adaptive robot
Автори англійськоюKondratenko Yurii Panteliiovych, Markovskyi Ihor Volodymyrovych, Kondratenko Volodymyr Yuriiovych, Chernov Serhii Kostiantynovych, Shvets' Eduard Anatoliiovych
Назва патенту російськоюМногофункциональное кистевое устройство адаптивного робота
Автори російськоюКондратенко Юрий Пантелеевич, Марковский Игорь Владимирович, Кондратенко Владимир Юрьевич, Чернов Сергей Константинович, Швец Эдуард Анатольевич
МПК / Мітки
МПК: B25J 15/00
Мітки: робота, багатофункціональний, адаптивного, пристрій, кистьовий
Код посилання
<a href="https://ua.patents.su/7-24270-bagatofunkcionalnijj-kistovijj-pristrijj-adaptivnogo-robota.html" target="_blank" rel="follow" title="База патентів України">Багатофункціональний кистьовий пристрій адаптивного робота</a>
Багатофункціональний кистьовий пристрій робота

Номер патенту: 18647
Опубліковано: 15.11.2006
Автори: Кондратенко Володимир Юрійович, Чернов Сергій Костянтинович, Кондратенко Юрій Пантелійович, Швець Едуард Анатолійович, Марковський Ігор Володимирович
МПК: B25J 15/00
Мітки: робота, багатофункціональний, пристрій, кистьовий
Формула / Реферат:
Багатофункціональний кистьовий пристрій робота, що містить дві пари захватних органів, основу, головний корпус, привід захватних органів, кінематично зв'язаний з гвинтовою парою, та зовнішній і внутрішній порожнинні циліндричні елементи, встановлені коаксіально гвинту гвинтової пари, кожний захватний елемент першої пари захватних органів за допомогою відповідної пари паралельних тяг кінематично зв'язано з гайкою гвинтової пари, а кожний...
Датчик проковзування адаптивного робота
Номер патенту: 15635
Опубліковано: 17.07.2006
Автори: Кондратенко Юрій Пантелійович, Крутських Сергій Владиславович, Кондратенко Володимир Юрійович
МПК: B25J 19/02
Мітки: адаптивного, датчик, проковзування, робота
Формула / Реферат:
Датчик проковзування адаптивного робота, що містить корпус, в якому встановлено чутливий елемент, виконаний у вигляді циліндричного ролика з можливістю повороту навколо своєї осі, робоча поверхня якого виконана з еластичного матеріалу, і систему реєстрації сигналу проковзування, який відрізняється тим, що система реєстрації сигналу проковзування виконана у вигляді двосекційного конденсатора, дві нерухомі обкладки якого через діелектрик...
Двозахоплювальний пристрій промислового робота

Номер патенту: 18300
Опубліковано: 15.11.2006
Автори: Павленко Іван Іванович, Мажара Віталій Анатолійович
МПК: B65H 09/00
Мітки: промислового, робота, двозахоплювальний, пристрій
Формула / Реферат:
Двозахоплювальний пристрій промислового робота для одночасного затискання двох деталей, що складається з корпусу, в якому розміщені шток-рейка, з поршнем всередині, та рейкове колесо, пневмоциліндра, важеля, фланця та захоплювачів, який відрізняється тим, що його устатковано рейковим механізмом, а один із захоплювачів виконано підпружиненим.
Адаптивний захватний пристрій інтелектуального робота

Номер патенту: 14569
Опубліковано: 15.05.2006
Автори: Кондратенко Юрій Пантелійович, Швець Едуард Анатолійович
МПК: B25J 15/00
Мітки: захватний, пристрій, робота, адаптивний, інтелектуального
Формула / Реферат:
Адаптивний захватний пристрій інтелектуального робота, що містить кінематично зв'язані з приводом губки, принаймні на одній з яких встановлено перший і другий датчики стискального зусилля, зв'язані з блоком керування приводом губок, інтерфейс якого містить чотири входи і чотири виходи, у губках виконані напрямні пази, у яких з можливістю переміщення встановлені пружно зв'язані з відповідною губкою рухливі елементи, які мають можливість...
Двозахватний пристрій промислового робота

Номер патенту: 15774
Опубліковано: 17.07.2006
Автори: Павленко Іван Іванович, Мажара Віталій Анатолійович
МПК: F16S 5/00
Мітки: пристрій, робота, промислового, двозахватний
Формула / Реферат:
1. Двозахватний пристрій промислового робота для одночасного затиску двох деталей, що складається з важелів з губками, вилки та тяги, які приєднані до кронштейна, обертового пневмоциліндра та пневмоциліндра розтиску, який відрізняється тим, що пневмоциліндр розтиску винесений за межі захватного пристрою.2. Двозахватний пристрій промислового робота за п. 1, який відрізняється тим, що розтиск захвату можливий лише в робочій...
Попередній патент: Спосіб оцінки імунного статусу дітей в процесі адаптації до умов курорту
Наступний патент: Вибухова речовина
Випадковий патент: Аварійно-рятувальний радіомаяк