Спосіб контролю технологічних процесів
Номер патенту: 46676
Опубліковано: 15.05.2002
Автори: Беккер Михайло Вікторович, Гордієнко Ігор Анатолієвич, Бантюков Євген Миколайович, Пітірімов Олександр Вікторович, Коток Валерій Борисович, Хохлов Олег Васильович, Ковалів Євстахій Осипович, Гавришенко Віктор Миколайович, Кучмій Євген Антонович, Волчков Іван Іванович, Олійников Вадим Вікторович
Формула / Реферат
Спосіб контролю технологічних процесів, що включає циклічне вимірювання значень параметрів технологічного процесу, запам'ятовування й індикацію вимірюваного значення кожного параметра, контроль порушення граничних уставок значенням параметра, який відрізняється тим, що введено контроль процесу вимірювання параметрів, контроль вірогідності значення параметра, формування коду стану параметра, порівняння сформованого коду стану параметра з отриманим при попередньому вимірі кодом стану цього ж параметра, ознаку зміни стану параметра і видачу сигналу про зміну стану параметра, якщо код стану параметра змінився, при цьому контроль процесу вимірювання значення параметра виконують на кожному етапі процесу вимірювання, при виявленні збою чи помилки на будь-якому етапі формують код "Збій вимірювання" і переходять до формування коду стану параметра, контроль вірогідності значення параметра виконують після одержання значення параметра, якщо значення параметра не є вірогідним, то переходять до формування коду стану параметра, а якщо є вірогідним, то запам'ятовують і індицирують значення вимірюваного параметра і переходять до контролю порушення значенням вимірюваного параметра граничних уставок, після якого формують код стану параметра, що порівнюють з отриманим при попередньому вимірі кодом стану цього ж параметра, якщо коди поточного і попереднього станів рівні, то переходять до вимірювання наступного параметра, а якщо не рівні, то поточний код стану параметра запам'ятовують як код попереднього стану, присвоюють значення "1" ознаці зміни стану параметра, видають сигнал про зміну стану параметра і переходять до вимірювання значення наступного параметра, сигнал про зміну стану параметра, після сприйняття його оператором, квітирують - присвоюють ознаці зміни стану параметра значення "0", при цьому знімається сигнал про зміну стану параметра.
Текст
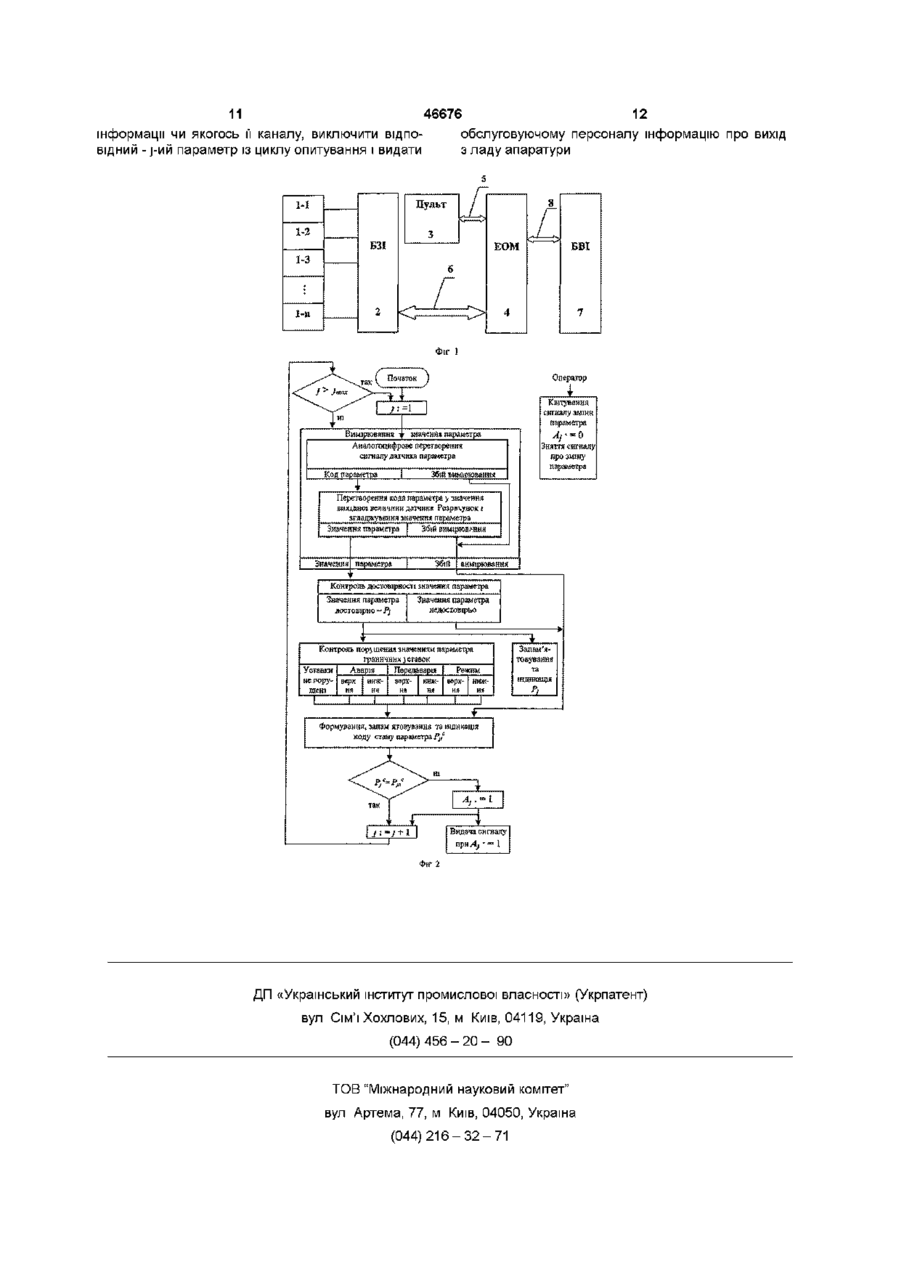
Спосіб контролю технологічних процесів, що включає циклічне вимірювання значень параметрів технологічного процесу, запам'ятовування й індикацію вимірюваного значення кожного параметра, контроль порушення граничних уставок значенням параметра, який відрізняється тим, що введено контроль процесу вимірювання параметрів, контроль вірогідності значення параметра, формування коду стану параметра, порівняння сформованого коду стану параметра з отриманим при попередньому вимірі кодом стану цього ж параметра, ознаку зміни стану параметра і видачу сигналу про зміну стану параметра, якщо код стану параметра змінився, при цьому контроль процесу вимірювання значення параметра виконують на кожному етапі процесу вимірювання, при виявленні збою чи помилки на будь-якому етапі формують код "Збій вимірювання" і переходять до формування коду стану параметра, контроль вірогідності значення параметра виконують після одержання значення параметра, якщо значення параметра не є вірогідним, то переходять до формування коду стану параметра, а якщо є вірогідним, то запам'ятовують і індицирують значення вимірюваного параметра і переходять до контролю порушення значенням вимірюваного параметра граничних уставок, після якого формують код стану параметра, що порівнюють з отриманим при попередньому вимірі кодом стану цього ж параметра, якщо коди поточного і попереднього станів рівні, то переходять до вимірювання наступного параметра, а якщо не рівні, то поточний код стану параметра запам'ятовують як код попереднього стану, присвоюють значення " 1 " ознаці зміни стану параметра, видають сигнал про зміну стану параметра і переходять до вимірювання значення наступного параметра, сигнал про зміну стану параметра, після сприйняття його оператором, квітирують - присвоюють ознаці зміни стану параметра значення "0", при цьому знімається сигнал про зміну стану параметра Передбачуваний винахід відноситься до автоматизованих систем керування технологічними процесами і може бути використаний для технологічної та аварійної сигналізації в складних технологічних комплексах, зокрема в газовій, нафтовій і ного і попереднього значень параметрів, яке виводять як результат вимірювання і запам'ятовують як попереднє для наступного вимірювання, а, якщо приріст перевищує задане значення, то виведення поточного обмірюваного значення параметра як результата вимірювання і запам'ятовування як попереднього значення для наступного вимірювання Даний спосіб введення й оброблення результатів вимірів також, як і спосіб контролю технологічних процесів, що заявляється, включає циклічне (періодичне) вимірювання значень параметрів і запам'ятовування значення параметра Однак, відсутність контролю процесу вимірювання параметрів, контролю вірогідності обмірюваного значення параметра, формування коду стану обмірю ХІМІЧНІЙ промисловості Відомий спосіб введення й оброблення результатів вимірювань (заявка Японии № 5272000, кл G08C 13/00, ВКС, вып 095, № 4, 1996), що включає циклічне вимірювання значень параметрів, запам'ятовування кожного поточного обмірюваного значення параметра в першому регістрі пам'яті, визначення приросту поточного значення параметра відносно попереднього значення параметра і, якщо приріст не перевищує заданого значення, то обчислення середнього значення поточ (О 1^ (О (О 46676 ваного параметра, порівняння сформованого коду сигналів у ході технологічного процесу також, як і стану параметра з отриманим при попередньому спосіб контролю технологічних процесів, що заяввимірюванні кодом стану цього ж параметра, озналяється, включає циклічне (періодичне) вимірюки зміни стану параметра і видачі сигналу про змівання значень параметрів технологічного процесу, ну стану параметра різко знижує інформативність контроль порушення уставок обмірюваним знаспособу надійність і ефективність керування ченням параметра - порівняння значення кожного параметра з його уставками і видачу ВІДПОВІДНОГО Відомий спосіб керування індикаторними елесигналу при порушенні уставок Однак, відсутність ментами робочих місць (а с СССР, № 1539814, кл контролю процесу вимірювання параметрів, контG08B 23/00, БИ №4, 1990), що включає формуролю вірогідності обмірюваного значення парамевання поточних значень контрольованих сигналів і тра, формування коду стану обмірюваного параїхніх граничних значень, порівняння поточних знаметра, порівняння сформованого коду стану чень контрольованих сигналів з їхніми граничними параметра з отриманим при попередньому вимірі значеннями, формування сигналів постійного рівня кодом стану цього ж параметра, ознаки зміни стапри перевищенні поточними значеннями контрону параметра і видачі сигналу про зміну стану пальованих сигналів їхніх граничних значень і подачу раметра різко знижує інформативність способу і їх на входи ВІДПОВІДНИХ індикаторних елементів надійність та ефективність керування кожного робочого місця, визначення КІЛЬКОСТІ сигналів постійного рівня, що надійшли на індикаторні Найближчим за технічною сутністю є спосіб елементи кожного робочого місця, порівняння КІконтролю технологічних процесів (патент України ЛЬКОСТІ сигналів постійного рівня, що надійшли, на № 42160, кл G 08В 23/00, БВ № 9, 2001), що індикаторні елементи кожного робочого місця з включає циклічне вимірювання значень параметзаданим припустимим числом одночасно включерів технологічного процесу, запам'ятовування й них індикаторних елементів на цьому робочому індикацію обмірюваного значення кожного парамеМІСЦІ і подачу сигналів постійного рівня на ВІДПОВІтра, контроль порушення значенням параметра ДНІ індикаторні елементи тих робочих місць, на його граничних уставок, який виконується шляхом яких КІЛЬКІСТЬ сигналів постійного рівня, що надійпорівняння обмірюваного значення кожного парашли, менше заданого припустимого числа одночаметра з його граничними уставками і видачу ВІДсно включених індикаторних елементів ПОВІДНОГО сигналу, якщо обмірюване значення параметра порушило хоча б одну граничну уставку, Даний спосіб керування індикаторними елемеконтроль величини приросту обмірюваного знантами робочих місць також, як і спосіб контролю чення параметра, який виконується після закінтехнологічних процесів, що заявляється, включає чення контролю порушення значенням параметра циклічне вимірювання значень параметрів (форйого граничних уставок незалежно від результатів мування поточних значень контрольованих сигнацього контролю шляхом визначення величини лів), їхню індикацію (видачу сигналу постійного приросту обмірюваного значення параметра відрівня на індикаторні елементи робочого місця), носно базового значення і порівняння величини порівняння поточних значень обмірюваних парацього приросту з заданою величиною приросту, метрів з їх граничними уставками (з їх граничними при цьому, якщо величина приросту обмірюваного значеннями) і видачу ВІДПОВІДНОГО сигналу при значення параметра менша заданого значення, то порушенні однієї з уставок Однак, відсутність конпереходять до вимірювання значення наступного тролю процесу вимірювання параметрів, контролю параметра, а при величині приросту, рівній чи бівірогідності обмірюваного значення параметра, льшій заданого значення, присвоюють ознаці зміформування коду стану обмірюваного параметра, ни параметра значення " 1 " , видають сигнал про порівняння сформованого коду стану параметра з зміну параметра, і переходять до вимірювання отриманим при попередньому вимірі кодом стану значення наступного параметра, сигнал про зміну цього ж параметра, ознаки зміни стану параметра і параметра, після сприйняття оператором, квітивидачі сигналу про зміну стану параметра різко рують - присвоюють ознаці зміни параметра зназнижує інформативність способу і надійність та чення "0", при цьому знімають сигнал про зміну ефективність керування параметра й останнє обмірюване значення параВідомий спосіб керування індикацією аварійметра запам'ятовують як базове значення, контних сигналів у ході технологічного процесу (заявка роль величини приросту обмірюваного значення Японії, № 5072637, кл G08B 23/00, ВКС, вип 095, параметра виконують у тому випадку, якщо зна№ 4, 1996), що включає циклічне вимірювання чення ознаки зміни параметра дорівнює "0", при параметрів, які групують і контролюють протягом цьому сигнал про задану зміну параметра формудекількох етапів, при цьому на кожному з етапів ють збільшенням яскравості індикації поточного вибирають необхідні для контролю параметри, значення параметра установлюють величини аварійних уставок і зводять значення уставок у таблицю, обмірювані знаДаний спосіб контролю технологічних процесів чення параметрів процесу порівнюють зі значентакож, як і спосіб контролю технологічних проценями таблиці, ідентифікують поточний етап сів, що заявляється, включає циклічне вимірювантехнологічного процесу і визначають параметри, ня параметрів технологічного процесу, запам'ятонеобхідні на даному етапі технологічного процесу, вування й індикацію обмірюваного значення якщо параметр є необхідним, то його порівнюють з кожного параметра, контроль порушення значенустановленою аварійною уставкою і, у випадку ням параметра його граничних уставок Однак, порушення значення уставки, видають аварійний відсутність контролю процесу вимірювання парасигнал метрів, контролю вірогідності обмірюваного значення параметра, формування коду стану обмірюДаний спосіб керування індикацією аварійних 46676 ваного параметра, порівняння сформованого коду також сформувати і видати оператору інформацію стану параметра з отриманим при попередньому про помилку, яка виникла при вимірюванні вимірі кодом стану цього ж параметра, ознаки зміУведення формування коду стану параметра, ни стану параметра і видачі сигналу про зміну стапорівняння сформованого коду стану параметра з ну параметра різко знижує інформативність спосоотриманим При попередньому вимірюванні кодом бу і якість та ефективність керування стану цього ж параметра, ознаки зміни стану параметра і видачі сигналу про зміну стану параметВ основу передбачуваного винаходу поставра, якщо код стану параметра змінився, дозволялена задача удосконалення способу контролю ють звернути увагу оператора на виникнення технологічних процесів шляхом підвищення його позаштатної ситуації, на необхідність її оцінки і якості й ефективності керування шляхом збільуживання ВІДПОВІДНИХ заходів шення інформативності контролю технологічного процесу за рахунок формування стану кожного Зазначене вище дозволяє підвищити інфорпараметра і видачі сигналу при його ЗМІНІ мативність контролю технологічного процесу і вірогідність інформації про хід технологічного проПоставлена задача вирішується за рахунок тоцесу та створює умови для підвищення якості й го, що у відомому способі контролю технологічних ефективності керування, тому що оператор одерпроцесів, який включає циклічне вимірювання знажує інформацію не тільки про хід технологічного чень параметрів технологічного процесу, запам'япроцесу, але і про вихід з ладу окремих засобів товування й індикацію обмірюваного значення ковимірювання, що дає можливість не тільки прискожного параметра, контроль порушення граничних рити усунення несправностей апаратури, але і уставок значенням параметра, згідно з винаходом виключає можливість прийняття рішень з керуванвведені контроль процесу вимірювання параметня технологічним процесом за помилковою інфоррів, контроль вірогідності значення параметра, мацією формування коду стану параметра, порівняння сформованого коду стану параметра з отриманим На кресленнях приведені при попередньому вимірі кодом стану цього ж пафіг 1 - система, що реалізує запропонований раметра, ознака зміни стану параметра і видача спосіб (приклад виконання), сигналу про зміну стану параметра, якщо код стафіг 2 - алгоритм роботи системи, що реалізує ну параметра змінився, при цьому контроль пропропонований спосіб цесу вимірювання значення параметра виконують Система контролю, що реалізує пропонований на кожному етапі процесу вимірювання, при виявспосіб - фіг1, містить датчики вимірювання параленні збою чи помилки на будь-якому етапі форметрів 1 - 1 , 1 - 2 , , 1 - п, блок збору і первинної мують код "Збій вимірювання" і переходять до фопідготовки інформації 2, до інформаційних входів рмування коду стану параметра, контроль якого підключені датчики 1 - 1 , 1 - 2 , , 1 - п, пульт вірогідності значення параметра виконують після оператора 3, електронно-обчислювальну машину одержання значення параметра, якщо значення (ЕОМ) 4, першу шину 5, що з'єднує ЕОМ 4 і пульт параметра не є вірогідним, то переходять до фороператора 3, другу шину 6, що з'єднує ЕОМ 4 і мування коду стану параметра, а, якщо вірогідно, блок збору і первинної обробки інформації 2, блок то запам'ятовують і індицирують значення обмірювиводу інформації 7, третю шину 8, що з'єднує ваного параметра і переходять до контролю поблок виводу інформації 7 і ЕОМ 4 В окремому рушення значенням обмірюваного параметра гравипадку блок виводу інформації 7 може бути реаничних уставок, після якого формують код стану лізований за допомогою одного чи декількох дисппараметра, що порівнюють з отриманим при попелеїв редньому вимірі кодом стану цього ж параметра, На схемі алгоритму роботи системи - фіг 2 виякщо коди поточного і попереднього станів рівні, користані наступні позначення то переходять до вимірювання наступного параj - порядковий номер параметра, метра, а, якщо не рівні, то поточний код стану паjmax - максимальний номер параметра, раметра запам'ятовують як код попереднього стаР, - обмірюване значення j-ro параметра, ну, присвоюють значення " 1 " ознаці зміни стану А, - ознака зміни стану j-ro параметра, параметра, видають сигнал про зміну стану параР/ - код поточного стану j-ro параметра, метра і переходять до вимірювання значення наPjnc - код попереднього стану j-ro параметра ступного параметра, сигнал про зміну стану параПропонований спосіб контролю технологічного метра, після сприйняття його оператором, процесу реалізується таким чином Як приклад квітирують - присвоюють ознаці зміни стану парареалізації пропонованого способу контролю розметра значення "0", при цьому знімається сигнал глянемо технологічний процес, для якого встановпро зміну стану параметра лені шість граничних уставок Уведення контролю процесу вимірювання па- верхня аварійна, раметрів на кожному етапі вимірювання дозволяє - нижня аварійна, виявити несправності в каналах зв'язку й в апара- верхня передаварійна, турі, яка використовується при вимірюванні пара- нижня передаварійна, метрів, сформувати І видати оператору інформа- верхня режимна, цію про помилку у випадку и виникнення при - нижня режимна вимірюванні значення параметра Значення аварійних, передаварійних і режимних уставок усіх контрольованих параметрів вибиУведення контролю вірогідності значення параються виходячи з вимог регламенту технологічраметра дозволяє виявити помилки при обчисленного процесу ні значення параметра, а також помилки, що виникли від випадкових факторів (наприклад, завад) і При використанні системи контролю - фіг 1, що 8 46676 ЕОМ 4 запам'ятовує і передає номер вимірюваного параметра в блок збору і первинної обробки інформації 2 Якщо через установлений час після передачі ЕОМ 4 номеру параметра від блоку збору і первинної обробки інформації 2 не надходить інформація про параметр, то ЕОМ 4 другий раз передає в блок збору і первинної обробки інформації 2 номер цього ж параметра Якщо через установлений час після другої передачі ЕОМ 4 номеру параметра від блоку збору і первинної обробки інформації 2 не надходить інформація про параметр, то ЕОМ 4 третій раз передає в блок збору і первинної обробки інформації 2 номер цього ж параметра Якщо через установлений час після третьої передачі ЕОМ 4 номеру параметра від блоку збору і первинної обробки інформації 2 не надходить інформація про параметр, то ЕОМ 4 формує код "Збій вимірювання" - код несправності каналу зв'язку ЕОМ 4 - блок збору і первинної обробки інформації 2 і АЦП, що відповідає вимірюваному параметру, і переходить до формування коду стану параметра - записує у відведені для коду "Збій вимірювання" розряди код, що відповідає коду несправності каналу зв'язку ЕОМ 4 - блок У системі контролю, що реалізує пропоновазбору і первинної обробки інформації 2 і АЦП, що ний спосіб, передбачене виявлення, наприклад, відповідає вимірюваному параметру, а в ІНШІ рознаступних збоїв і несправностей ряди - "0" Отриманий код стану вимірюваного панесправність каналу зв'язку ЕОМ 4 - блок збораметра ЕОМ 4 запам'ятовує і порівнює з його ру і первинної обробки інформації 2 і аналогопопереднім значенням Якщо код стану параметра цифровий перетворювач (АЦП), що відповідає не змінився, то ЕОМ 4 переходить до вимірювання вимірюваному параметру визначається в тому значення наступного параметра Якщо код стану випадку, якщо через установлений час після перепараметра змінився в порівнянні з його попередачі ЕОМ 4 номеру параметра блок збору і перднім значенням, то ознаці зміни стану параметра винної обробки інформації 2 не передасть інфорприсвоюється значення " 1 " по якому блок виводу мацію про параметр, інформації 7 видає оператору сигнал про зміну наявність обриву в колі підключення датчика стану параметра і система переходить до вимірюпараметра - виявляється ЕОМ 4, якщо АЦП блоку вання наступного параметра збору і первинної обробки інформації 2 видає нульове значення вихідної величини датчика після Якщо канал зв'язку ЕОМ 4 - блок збору і перйого підключення до АЦП, винної обробки інформації 2 і АЦП, що відповідає вимірюваному параметру, справні, то після одернаявність короткого замикання в колі підклюжання номера вимірюваного параметра блок збочення датчика параметра - виявляється ЕОМ 4, ру і первинної обробки інформації 2 підключає якщо АЦП блоку збору і первинної обробки інфордатчик вимірюваного параметра до ВІДПОВІДНОГО мації 2 видає значення вихідної величини датчика, АЦП і після одержання коду вихідної величини що перевищує припустиме значення вихідною ведатчика передає його в ЕОМ 4, яка, порівнюючи личиною датчика після його підключення до АЦП, отриманий код з уставками стану, визначає стан несправність датчика, кіл його підключення, датчика - робочий, обрив кола підключення датчиАЦП і кіл його підключення - визначається при пека чи коротке замикання кола датчика Так наприретворенні коду параметра в значення вихідної клад, при використанні струмового датчика з мевеличини датчика і обчисленні значення параметжами вихідного струму 4 - 20 міліамперів, якщо ра втому випадку, якщо код чи проміжні результакод, отриманий ЕОМ 4, відповідає значно меншоти не потрапляють в область їхнього визначення му струмові, ніж 4 міліампери, наприклад, дорівдля даної функції перетворення нює 0,5 міліампера, то це свідчить про те, що відЗазначеним несправностям, а також невірогідбувся обрив кола підключення датчика, якщо код, ності значення параметра привласнені коди, що отриманий ЕОМ 4, відповідає струму більшому, видаються при виявленні відповідної несправності ніж 20 міліампер, то це свідчить про те, що в колі чи невірогідності значення параметра підключення датчика коротке замикання, якщо ж Запуск системи контролю здійснюється з пульструм, отриманий ЕОМ 4 відповідає струмові, що та 3 Відразу після запуску системи блок виводу знаходиться в межах від 4 до 20 міліамперів, то це інформації 7 індицирує нульові значення параметсвідчить про те, що датчик знаходиться в робочорів, а система контролю починає збирання інформу стані мації про технологічний процес - опитує датчики параметрів технологічного процесу з установлеУ випадку, якщо код вихідної величини датчиним періодом Опитування кожного параметра ка знаходиться поза межами уставок стану, ЕОМ 4 починається з вироблення ЕОМ 4 номеру опитуформує код "Збій вимірювання" - код, привласневаного (вимірюваного) параметра (відразу після ний обриву кола підключення опитаного датчика, запуску системи це номер першого параметра) чи код, привласнений короткому замиканню кола реалізує спосіб, попередньо в пам'яті ЕОМ 4 виділяють десять блоків пам'яті, комірки усередині яких нумеруються однаково - блок збереження верхніх аварійних уставок параметрів, блок збереження нижніх аварійних уставок параметрів, блок збереження верхніх передаварійних уставок параметрів, блок збереження нижніх передаварійних уставок параметрів, блок збереження верхніх режимних уставок параметрів, блок збереження нижніх, режимних уставок параметрів, блок збереження кодів "Збій вимірювання" і "Невірогідність", блок збереження кодів стану параметрів, блок збереження ознак зміни стану параметрів, блок збереження поточних значень параметрів Попередньо в блоки збереження аварійних, предаварійних і режимних уставок параметрів записуються значення ВІДПОВІДНИХ уставок кожного параметра У блоки збереження кодів "Збій вимірювання" і "Невірогідність", результатів контролю граничних уставок, ознак зміни стану параметрів і поточних значень параметрів в усі комірки записуються нульові значення, які при роботі будуть замінені на реальні значення 46676 10 підключення опитаного датчика, і переходить до наступного параметра формування коду стану параметра - записує у відЯкщо при опитуванні датчика код параметра ведені для коду "Збій вимірювання" розряди код, отриманий у встановлений час, знаходиться в гращо відповідає коду обриву чи короткого замикання ницях уставок стану, значення вихідної величини кола опитаного датчика, а в ІНШІ розряди - "0" датчика знаходиться в її області визначення й Отриманий код стану параметра, що вимірюється, отримане значення параметра вірогідно, то це ЕОМ 4 запам'ятовує і порівнює з його попереднім значення вважається обмірюваним значенням значенням Якщо код стану параметра не змінивпараметра, воно запам'ятовується ЕОМ 4 і індицися, то ЕОМ 4 переходить до вимірювання значенрується блоком виводу інформації 7 ня наступного параметра Якщо код стану парамеДалі ЕОМ 4 порівнює обмірюване значення тра змінився в порівнянні з його попереднім параметра з граничними уставками - виконує конзначенням, то ознаці зміни стану параметра притроль порушення обмірюваним значенням парасвоюється значення " 1 " , по якому блок виводу інметра граничних уставок У результаті ЕОМ 4 виформації 7 видає оператору сигнал про зміну старобляє код результату контролю - код однієї з ну параметра і система переходить до таких ситуацій вимірювання наступного параметра не порушена жодна з уставок, порушена верхня режимна уставка, Якщо при опитуванні датчика код параметра порушена нижня режимна уставка, отриманий у встановлений час і знаходиться в порушена верхня передаварійна уставка, межах уставок стану, то ЕОМ 4 отриманий код порушена нижня передаварійна уставка, параметра перетворює у значення вихідної велипорушена верхня аварійна уставка, чини датчика, яку перевіряє на перебування в її порушена нижня аварійна уставка області визначення Якщо значення вихідної велиЗа результатом контролю порушення граниччини знаходиться поза областю визначення, то них уставок ЕОМ 4 формує код стану параметра ЕОМ 4 формує код "Збій вимірювання" - код, призаписує код результату контролю у відведені розвласнений ситуації, коли отримана вихідна велиряди коду стану параметра, а в ІНШІ записує "0" чина опитаного датчика знаходиться поза областю визначення, і переходить до формування коду Отриманий код стану обмірюваного параметра стану параметра - записує у відведені для коду ЕОМ 4 запам'ятовує і порівнює з його попереднім "Збій вимірювання" розряди код що відповідає значенням Якщо код стану параметра не змінивситуації, коли вихідна величина опитаного датчика ся, то ЕОМ 4 переходить до вимірювання значензнаходиться поза областю визначення, а в ІНШІ ня наступного параметра Якщо код стану парамерозряди - "0" Отриманий код стану вимірюваного тра змінився в порівнянні з його попереднім параметра ЕОМ 4 запам'ятовує і порівнює з його значенням, то ознаці зміни стану параметра припопереднім значенням Якщо код стану параметра своюється значення " 1 " , по якому блок виводу інне змінився, то ЕОМ 4 переходить до вимірювання формації 7 видає оператору сигнал про зміну стазначення наступного параметра Якщо код стану ну параметра і переходить до вимірювання параметра змінився в порівнянні з його поперенаступного параметра днім значенням, то ознаці зміни стану параметра Код стану параметра видається ЕОМ 4 у блок присвоюється значення "1", по якому блок виводу виводу інформації 7, який, ВІДПОВІДНО ДО стану інформації 7 видає оператору сигнал про зміну параметра, може здійснювати додаткову сигналістану параметра і переходить до вимірювання зацію, наприклад, у залежності від результатів наступного параметра контролю порушення граничних уставок підсвічувати значення параметра різними кольорами - при Якщо при опитуванні датчика код параметра відсутності порушення уставок - зеленим, при поотриманий у встановлений час, знаходиться в мерушенні режимних уставок - жовтим, при порушенжах уставок стану і значення вихідної величини ні передаварійних уставок - червоним, а при податчика знаходиться в її області визначення, то рушенні аварійних уставок - червоним з ЕОМ 4 за значенням вихідної величини датчика миготінням обчислює значення параметра і використовуючи результати попередніх вимірювань згладжує його Оператор при одержанні сигналу про зміну Отримане значення параметра ЕОМ 4 перевіряє стану якого-небудь параметра оцінює виробничу на вірогідність, порівнюючи його з уставками віроситуацію і, при необхідності, уживає заходів з когідності Якщо значення параметра невірогідно, то ректування ходу технологічного процесу і, після ЕОМ 4 формує код "Невірогідність" і переходить цього, з пульта 3 подає сигнал про сприйняття до формування коду стану параметра - записує у зміни стану параметра - квітирує сигнал зміни, при відведені для коду "Невірогідність" розряди, а в цьому ознаці зміни параметра присвоюється знаІНШІ розряди - "0" чення "0" та у блоці виводу інформації 7 знімаються сигнали про зміну стану параметра Отриманий код стану вимірюваного параметра ЕОМ 4 запам'ятовує і порівнює з його попереднім Сигнали "Збій вимірювання" можуть виводитизначенням Якщо код стану параметра не змінився безпосередньо після виникнення обслуговуюся, то ЕОМ 4 переходить до вимірювання значенчому систему персоналу для інформування про ня наступного параметра Якщо код стану парамероботу апаратури системи контролю Крім того, тра змінився в порівнянні з його попереднім якщо при опитуванні значень параметрів протягом значенням, то ознаці зміни стану параметра придекількох послідовних циклів отримано, що опитусвоюється значення " 1 " , по якому блок виводу інвання, наприклад, j-ro параметра не виконано чеформації 7 видає оператору сигнал про зміну старез яку-небудь несправність одного виду, то можну параметра і переходить до вимірювання на зафіксувати відмову апаратури збору 11 46676 12 інформації чи якогось її каналу, виключити відпообслуговуючому персоналу інформацію про вихід БІДНИЙ - j-ий параметр із циклу опитування і видати з ладу апаратури 1-ї 1-2БВЇ ЕОМ 1-3 І-ц 2 Оператор Перетворення кода параметра у значення БИШНОІ величини датчика Розрахунок і згладауваикя значення параметра Значення параметра Збій вимірювання Збііі Значенії? параметра Контроль достовірної;!! значення а: Значення параметра. достовірно - Pj Значення параметра недостовірно Коні толь пор; шення значенням параметра граничних уставок Ав рія Уставки Передаварія Реч им веря виж- вгрх- ИИіК- веря- нижне Fopyня нч ня ня ия Залам'ятоьування нормування, їапам ятовування та індикація кояу стану параметра Р/ ДП «Український інститут промислової власності» (Укрпатент) вул Сім'ї Хохлових, 15, м Київ, 04119, Україна (044) 456 - 20 - 90 ТОВ "Міжнародний науковий комітет" вул Артема, 77, м Київ, 04050, Україна (044)216-32-71
ДивитисяДодаткова інформація
Автори англійськоюBekker Mykhailo Viktorovych, Kovaliv Yevstakhii Osypovych, Kotok Valerii Bronislavovych, Kuchmii Yevhen Antonovych, Volchkov Ivan Ivanovych, Khokhlov Oleh Vasyliovych, Oliinykov Vadym Viktorovych, Bantiukov Yevhen Mykolaiovych
Автори російськоюБеккер Михаил Викторович, Ковалив Евстахий Иосифович, Коток Валерий Борисович, Кучмий Евгений Антонович, Волчков Иван Иванович, Хохлов Олег Васильевич, Олийников Вадим Викторович, Бантюков Евгений Николаевич
МПК / Мітки
МПК: G08B 23/00
Мітки: контролю, процесів, технологічних, спосіб
Код посилання
<a href="https://ua.patents.su/6-46676-sposib-kontrolyu-tekhnologichnikh-procesiv.html" target="_blank" rel="follow" title="База патентів України">Спосіб контролю технологічних процесів</a>
Спосіб контролю технологічних процесів
Номер патенту: 42160
Опубліковано: 15.10.2001
Автори: Бантюков Євген Миколайович, Мурін Вадим Олександрович, Рибчич Ілля Йосипович, Сливканич Володимир Семенович, Алексєєнко Сергій Порфирійович, Коток Валерій Борисович, Олексюк Андрій Володимирович, Шваченко Ігор Іванович
МПК: G08B 23/00
Мітки: технологічних, спосіб, процесів, контролю
Формула / Реферат:
1. Спосіб контролю технологічних процесів, який включає циклічне вимірювання значень параметрів технологічного процесу, запам'ятовування і індикацію виміряного значення кожного параметра, контроль порушення значенням параметра його граничних уставок, що виконується шляхом порівняння виміряного значення кожного параметра з його граничними уставками і видачі відповідного сигналу, якщо виміряне значення параметра порушило хоча б одну граничну...
Спосіб визначення похибок датчиків систем автоматичного регулювання параметрів технологічних процесів та пристрій для його здійснення
Номер патенту: 18197
Опубліковано: 01.07.1997
Автори: Шевченко Костянтин Леонідович, Скрипник Юрій Олексійович, Дубровний Віктор Опанасович
МПК: G05B 23/00
Мітки: спосіб, технологічних, пристрій, систем, датчиків, визначення, регулювання, здійснення, параметрів, автоматичного, похибок, процесів
Формула / Реферат:
1. Способ определения погрешностей датчиков систем автоматического регулирования параметров технологических процессов, заключающийся в том, что задатчиком устанавливают требуемое значение параметра технологического процесса, изменяют выходной сигнал датчика несколько раз, меняя соответствующим образом измеряемый параметр технологического процесса и вычисляют погрешности датчика по значениям калиброванных воздействий на выходной сигнал...
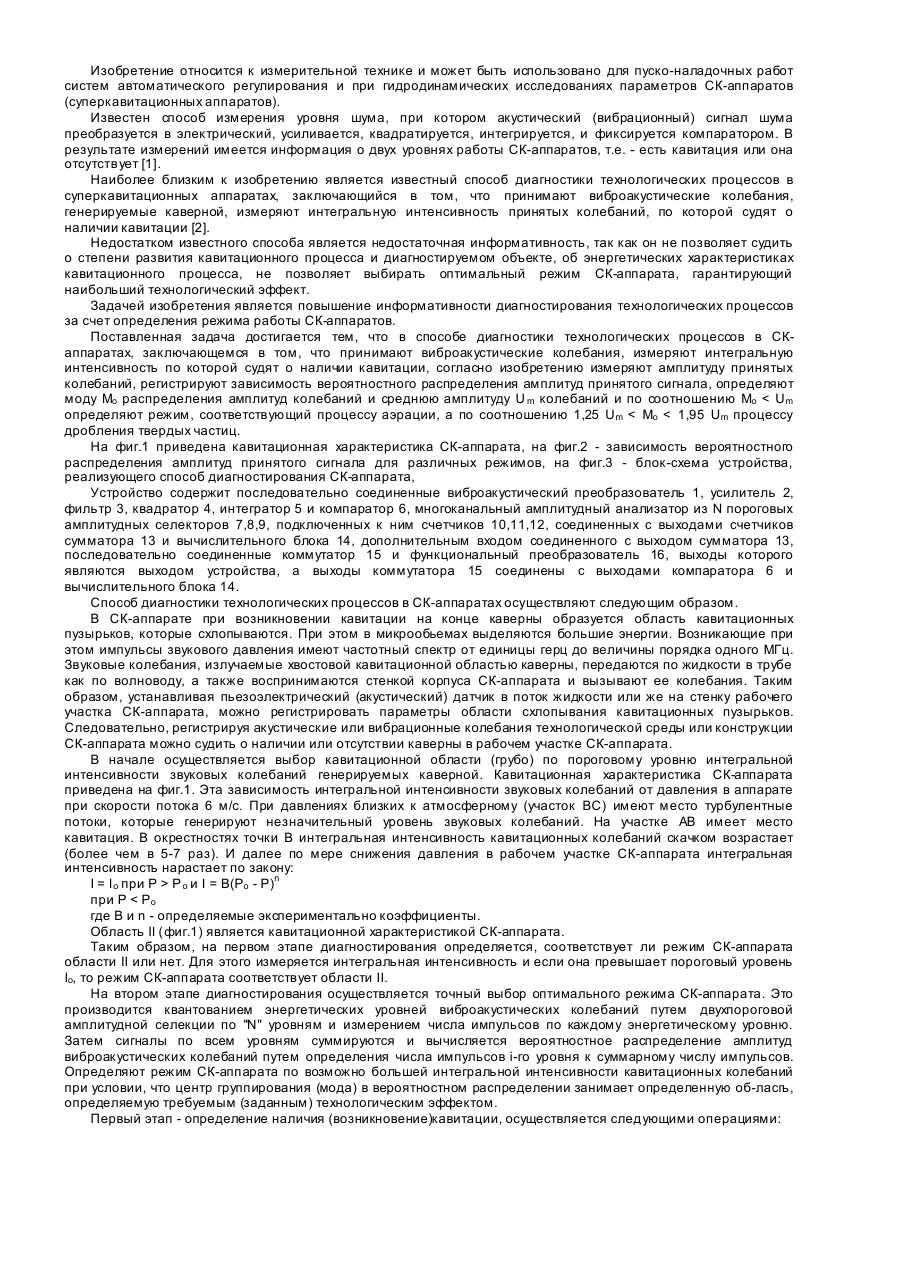
Спосіб діагностики технологічних процесів в суперкавітаційних апаратах
Номер патенту: 3053
Опубліковано: 26.12.1994
Автори: Барабанов Юрій Михайлович, Нємчин Олександр Федорович, Гладаревський Володимир Михайлович, Штангеєв Костянтин Остапович
МПК: G01N 29/02
Мітки: апаратах, суперкавітаційних, процесів, діагностики, спосіб, технологічних
Формула / Реферат:
Способ диагностики технологических процессов в суперкавитационных аппаратах, заключающийся в том, что принимают виброакустические колебания, генерируемые каверной, измеряют интегральную интенсивность принятых колебаний, по которой судят о наличии кавитации, отличающийся тем, что измеряют амплитуду принятых колебаний, регистрируют зависимость вероятностного распределения амплитуд принятого сигнала, определяют моду Mo распределения амплитуд...
Спосіб контролю технологічних параметрів
Номер патенту: 20667
Опубліковано: 02.09.1997
Автор: Жуков Леонід Федорович
МПК: G01F 23/00, B22D 11/16, G01K 17/08
Мітки: контролю, параметрів, технологічних, спосіб
Формула / Реферат:
Способ контроля технологических параметров, включающий измерение температур внешней части теплопроводного элемента и последующий расчет по ним контролируемых параметров, отличающийся тем, что основан на эффекте Жукова (аномальном тепловом эффекте) феноменологически проявляющемся при контроле в том, что при резком повышении температуры приемной частя теплопроводного элемента контролируют первоначальное незначительное нормальное повышение,...
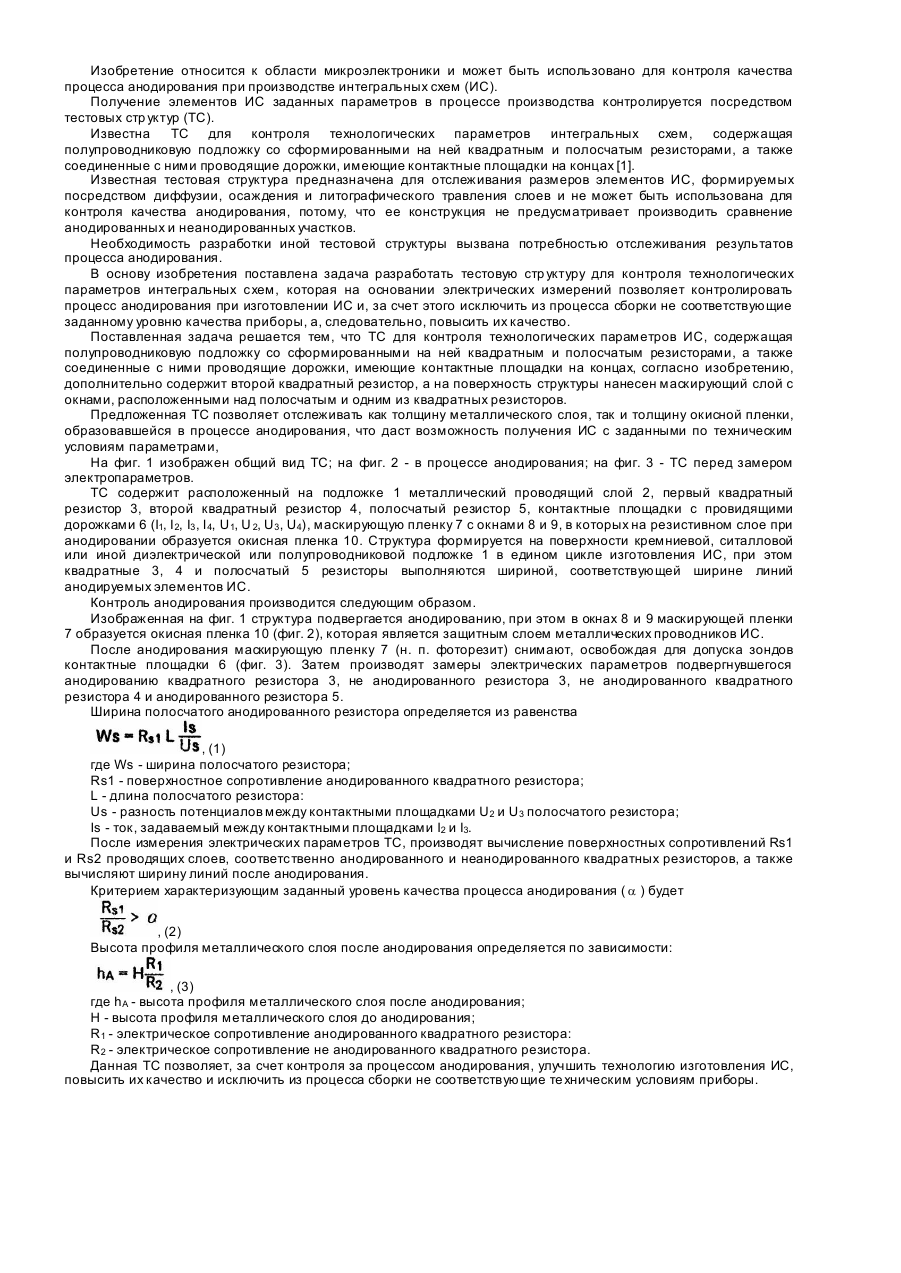
Тестова структура для контролю технологічних параметрів інтегральних схем
Номер патенту: 4059
Опубліковано: 27.12.1994
Автори: Ілюк Ігор Євгенович, Молчанов Костянтин Вікторович, Пенцак Іван Борисович, Чекмезов Олександр Миколайович, Остапчук Анатолій Іванович
МПК: H01L 21/66
Мітки: параметрів, схем, структура, тестова, контролю, інтегральних, технологічних
Формула / Реферат:
Тестовая структура для контроля технологических параметров интегральных схем, содержащая полупроводниковую подложку со сформированными на ней квадратным и полосчатым резисторами, а также соединенные с ними проводящие дорожки, имеющие контактные площадки на концах, отличающаяся тем, что она дополнительно содержит второй квадратный резистор, а на поверхность структуры нанесен маскирующий слой с окнами, расположенными над полосчатым и одним из...
Попередній патент: Противибуховий пристрій
Наступний патент: Спосіб відновлення профілю зношеного гребеня колеса рейкового транспорту
Випадковий патент: Курильний виріб