Спосіб та пристрій для контролю структурної зміни штреку
Номер патенту: 88712
Опубліковано: 10.11.2009
Автори: Релстон Джонатон Кері, Келлі Майкл Шоун, Харгрейв Чад Оуен
Формула / Реферат
1. Спосіб визначення структурної зміни штреку при розробці родовища, у якому:
застосовують датчик для сканування профілю штреку у певному місці штреку для сканування, головним чином, перпендикулярно до його напряму і одержують зображення першого профілю поверхонь штреку, і зберігають інформацію такого зображення першого профілю в запам'ятовуючому пристрої,
пізніше одержують зображення другого профілю поверхонь штреку, головним чином, перпендикулярного до напряму штреку у певному місці в штреці, що, головним чином, співпадає з місцем, де було одержано зображення першого профілю, і одержують інформацію такого другого зображення,
співставляють збережену інформацію зображення першого профілю з інформацією зображення другого профілю,
визначають із зареєстрованої інформації зображення першого профілю та зображення другого профілю будь-яку структурну зміну поверхонь штреку.
2. Спосіб за п. 1, який відрізняється тим, що датчик для сканування штреку встановлюють на рухомому пристрої штреку гірничого комбайна і зображення першого профілю одержують спереду рухомого пристрою штреку, а зображення другого профілю одержують позаду рухомого пристрою штреку в момент часу, коли заднє положення, головним чином, співпадає з положенням в штреці, де було одержано зображення першого профілю.
3. Спосіб за п. 2, який відрізняється тим, що застосовують передній сканувальний датчик для сканування першого профілю в передньому положенні та другий задній сканувальний датчик для сканування другого профілю у задньому положенні.
4. Спосіб за п. 3, який відрізняється тим, що зберігають інформацію, яка стосується відстані між положенням на рухомому пристрої штреку, де одержано зображення першого профілю, та положенням, де одержано зображення другого профілю, так, що, коли величина переміщення рухомого пристрою штреку, головним чином, відповідає відстані між ними, то можуть існувати накладені зображення та співпадання інформації зображення першого профілю та зображення другого профілю.
5. Спосіб за п. 1, який відрізняється тим, що порівнюють інформацію від зображення першого профілю із зображенням другого профілю для одержання профілів накладених зображень для визначення відмінностей.
6. Спосіб за п. 5, який відрізняється тим, що будь-які визначені відмінності порівнюють з наперед визначеним інтервалом або пороговою різницею інтенсивності, і при перевищенні порогової величини формують вихідний сигнал.
7. Спосіб за п. 3, який відрізняється тим, що на рухомому пристрої штреку встановлюють датчик відстані для визначення величини переміщення так, що, коли величина переміщення відповідає відстані між переднім датчиком та заднім датчиком і існує, головним чином, налягання зображень, то потім може здійснюватися згадане співставлення.
8. Спосіб за п. 2, який відрізняється тим, що у ньому коригують інформацію зображення переднього положення або інформацію зображення заднього положення для будь-якої зміни, що може відбутися у такій інформації в результаті зміни в траєкторії або розміщенні рухомого пристрою штреку при його русі вздовж штреку.
9. Спосіб за п. 6, який відрізняється тим, що сформований вихідний сигнал є попереджувальним вихідним сигналом.
10. Спосіб за п. 6, який відрізняється тим, що наперед визначена порогова різниця базується на наперед встановлених дозволених змінах відмінності інформації безпечного профілю для шахти.
11. Спосіб за п. 5, який відрізняється тим, що сходження поверхонь штреку визначають визначенням відмінностей в профілях накладених зображень.
12. Спосіб за п. 2, який відрізняється тим, що зображення переднього положення та зображення заднього положення одержують від сканувальних датчиків типу, який включає 2-вимірні або 3-вимірні сканувальні датчики.
13. Спосіб за п. 7, який відрізняється тим, що датчик відстані вибирають з датчиків типу, який включає 2-вимірні або 3-вимірні сканувальні датчики, і у якому величину віддалення визначають як величину переміщення.
14. Спосіб за п. 13, який відрізняється тим, що датчик відстані сканує в напрямі, який наближається до напряму віддалення рухомого пристрою штреку.
15. Спосіб за п. 14, який відрізняється тим, що величину віддалення визначають обробкою інформації від датчика для сканування профілю, використовуючи спосіб кореляції або геометричний спосіб.
16. Пристрій для визначення структурної зміни штреку при розробці родовища, який має:
сканувальний прилад для надання інформації зображення першого профілю поверхонь штреку у певному місці штреку і, головним чином, для сканування перпендикулярно до напряму штреку, а пізніше - інформації зображення другого профілю поверхонь штреку, головним чином, у тому ж місці штреку, як і у випадку першого зображення і, головним чином, при скануванні перпендикулярно до напряму штреку,
запам'ятовуючий пристрій для зберігання інформації зображення першого профілю, засоби порівняння для співставлення інформації зображення профілю, збереженої в запам'ятовуючому пристрої, з інформацією зображення другого профілю, де місце другого зображення співпадає з місцем, де одержано перше зображення,
процесор для виявлення відмінностей для надання можливості реєстрації відмінностей в інформації першого зображення та другого зображення, завдяки чому може визначатися структурна зміна штреку.
17. Пристрій за п. 16, який відрізняється тим, що у ньому сканувальний пристрій виконаний з можливістю встановлення на рухомому пристрої так, що сканувальний датчик буде розташований у його передньому положенні для одержання першого зображення, а другий сканувальний датчик - у його задньому положенні для одержання другого зображення.
18. Пристрій за п. 17, який відрізняється тим, що він має датчик відстані для визначення величини переміщення рухомого пристрою штреку та процесор для обробки інформації про величину переміщення, визначеної за допомогою відстані між місцем переднього зображення та місцем заднього зображення, для визначення точки, де місце заднього зображення, головним чином, співпадає з місцем переднього зображення так, що згадані засоби порівняння можуть співставляти інформацію зображення профілю.
19. Пристрій за п. 18, який відрізняється тим, що він має процесор для обробки інформації зображень у місці переднього зображення та місці заднього зображення для визначення будь-якої зімни траєкторії або розміщення у місці, де одержано друге зображення відносно місця, де одержано перше зображення, і для коригування інформації зображень для обчислення будь-якої такої зміни перед обробкою згаданим процесором для визначення відмінностей зображень.
20. Пристрій за п. 18, який відрізняється тим, що він має компаратор для порівняння інформації першого зображення з інформацією зареєстрованого другого зображення шляхом накладання обох зображень.
21. Пристрій за п. 16, який відрізняється тим, що він має порогову схему, де будь-яка відмінність в інформації зображень ініціює вихідний сигнал при перевищенні відмінністю порогової величини.
22. Пристрій за п. 21, який відрізняється тим, що він має попереджувальний пристрій для надсилання попередження при перевищенні відмінністю порогової величини.
23. Пристрій за п. 16, який відрізняється тим, що сканувальний пристрій для надання зображень вибраний серед сканувальних пристроїв типу, який включає 2-вимірні або 3-вимірні сканувальні датчики.
24. Пристрій за п. 18, який відрізняється тим, що датчик відстані вибраний серед датчиків, які включають 2-вимірні або 3-вимірні сканувальні датчики відстані.
25. Пристрій за п. 16, який відрізняється тим, що сходження поверхонь штреку визначено із зареєстрованих відмінностей, одержаних від процесора для визначення відмінностей зображень.
Текст
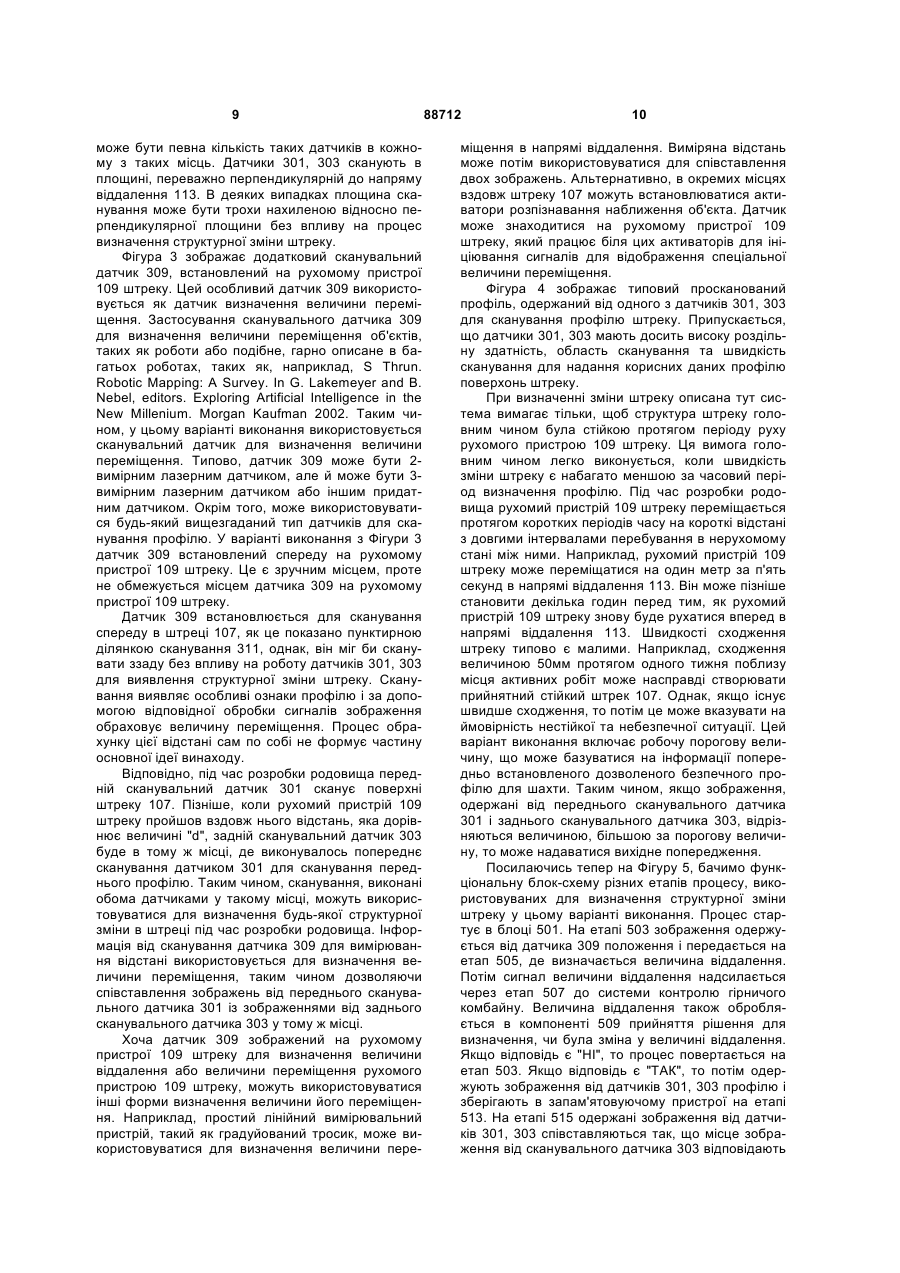
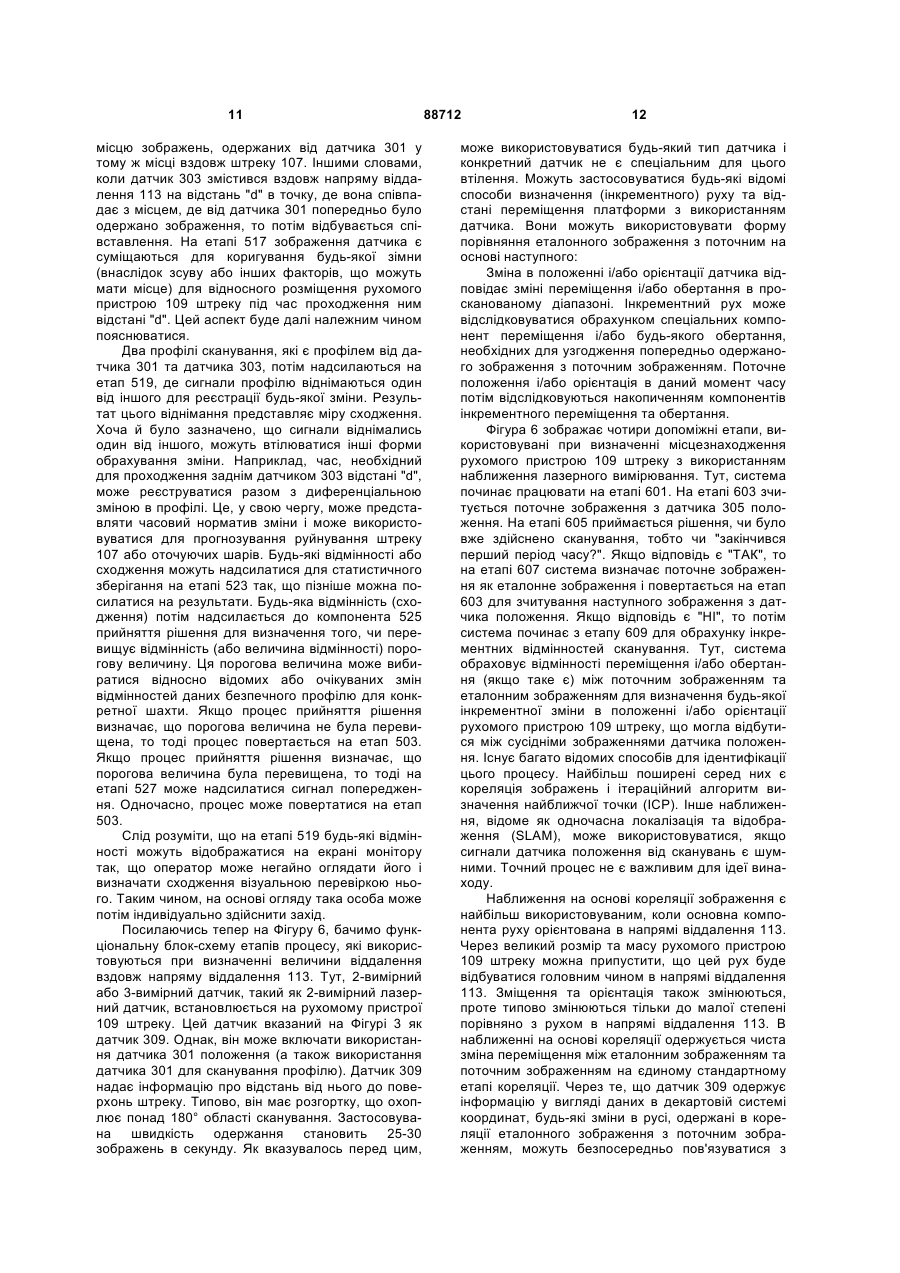
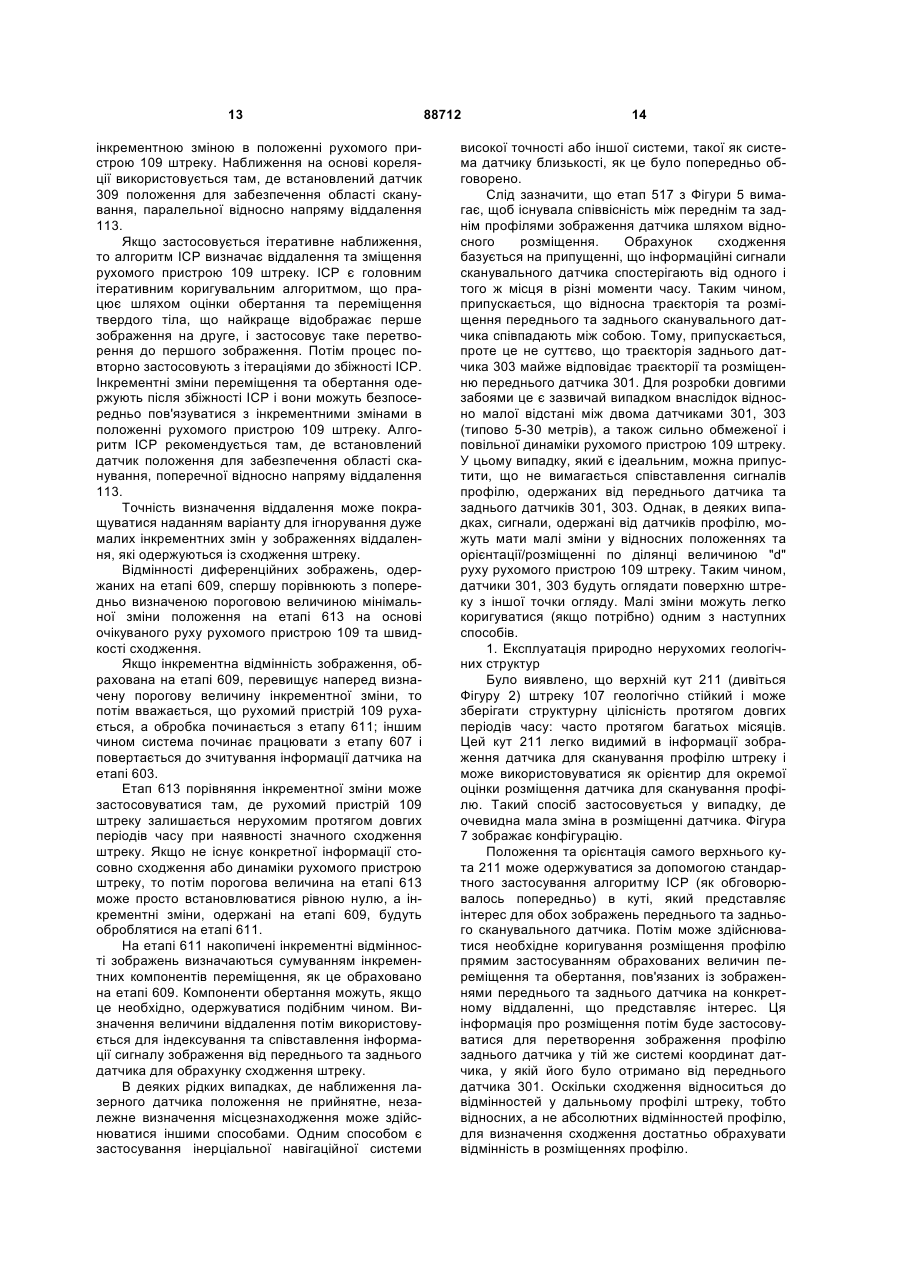
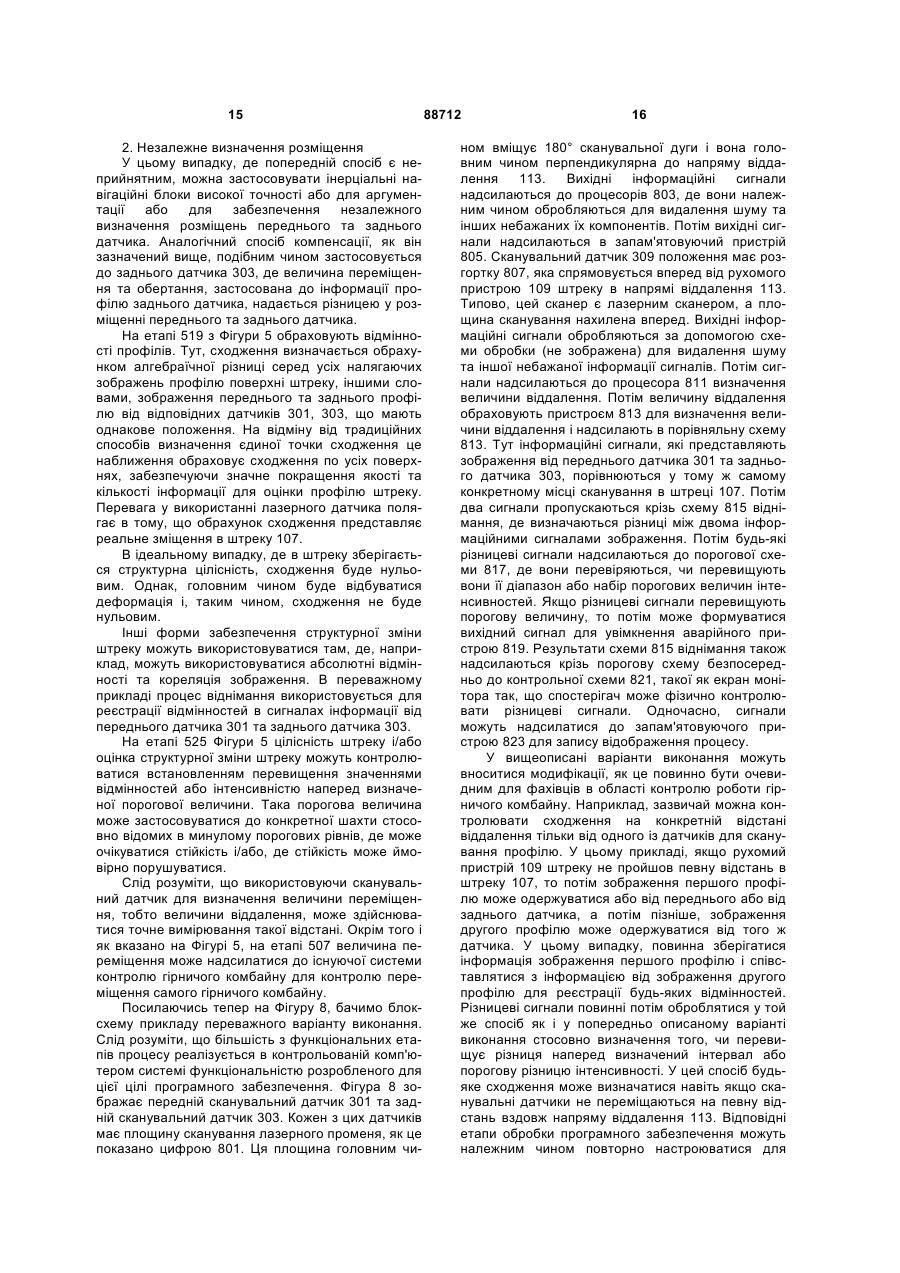
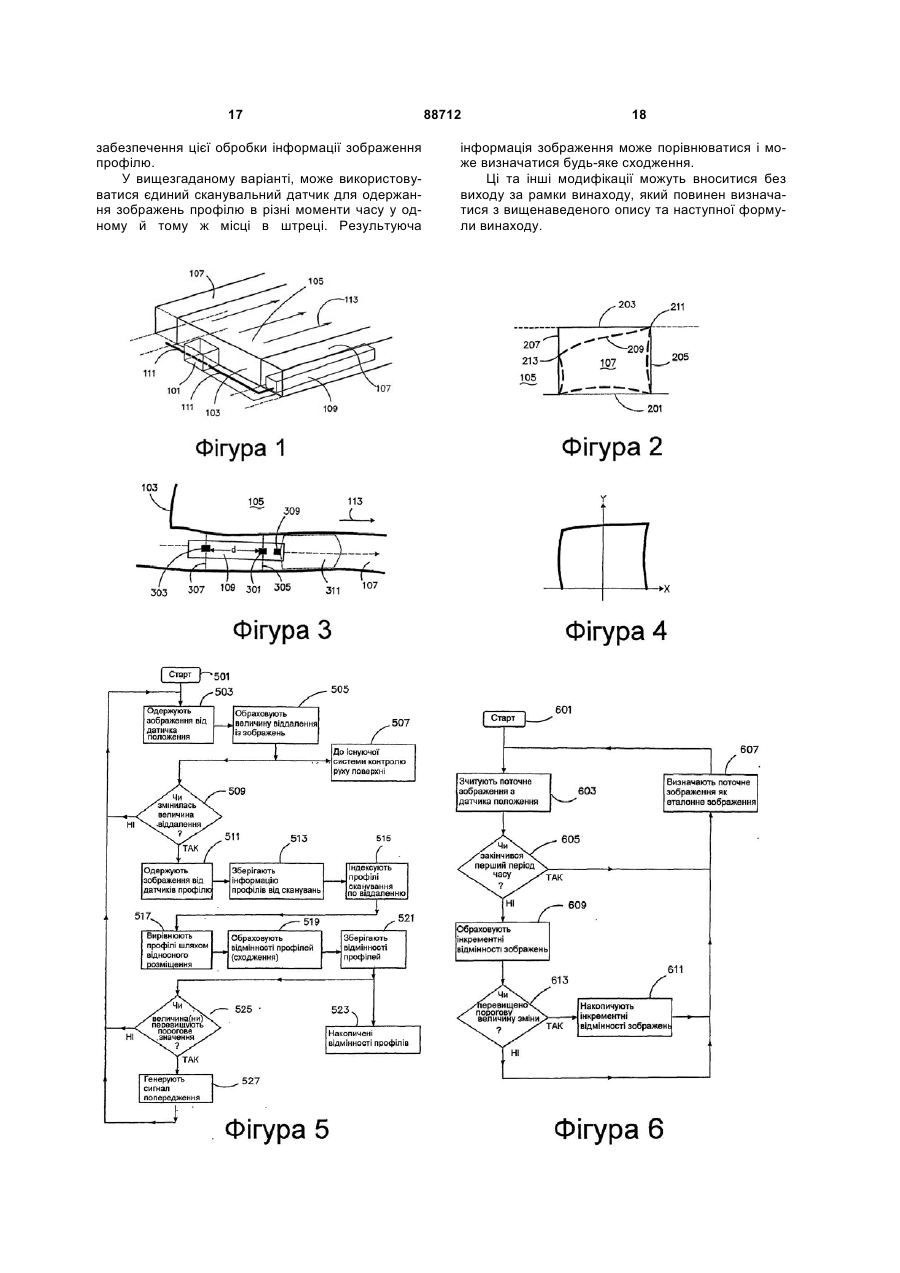
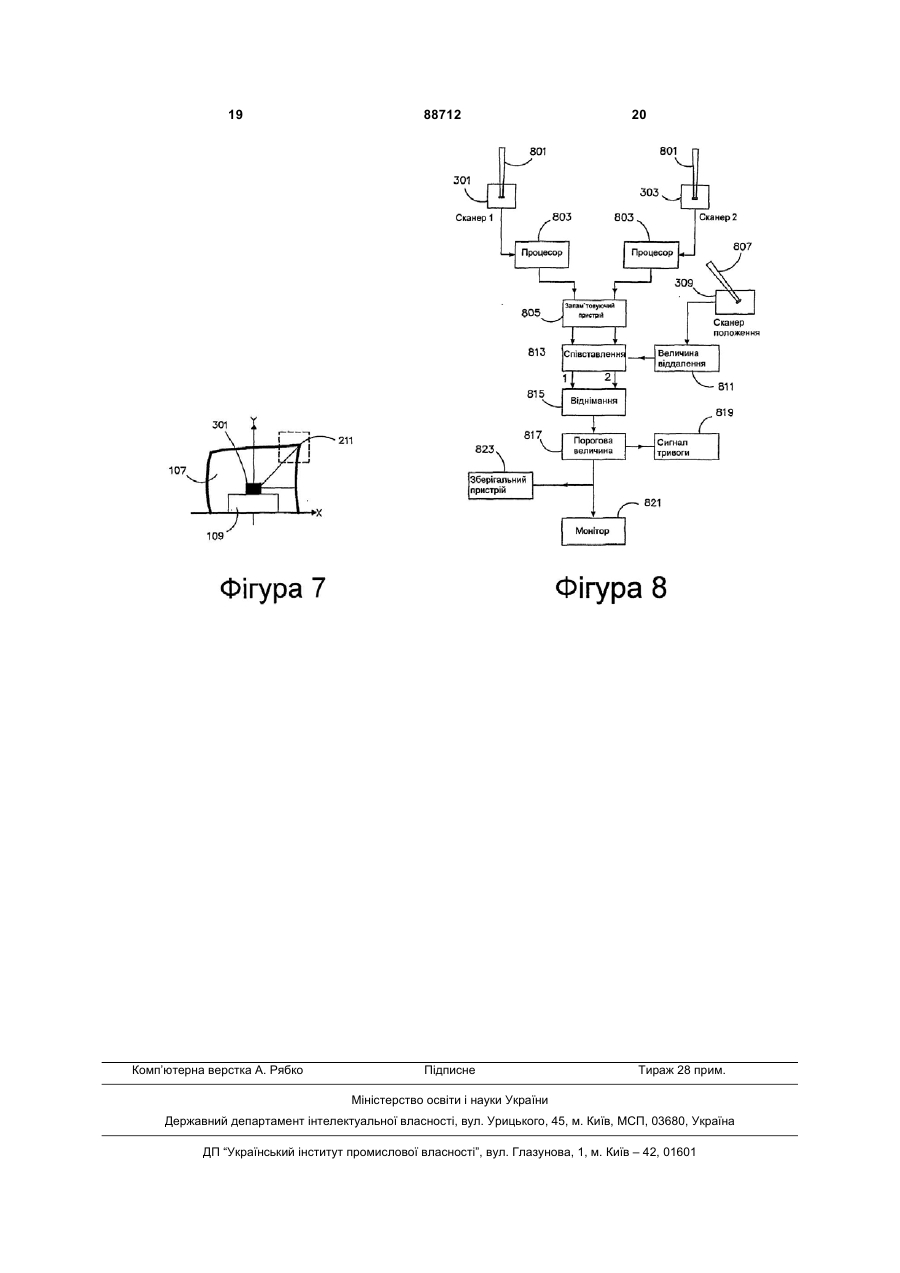
1. Спосіб визначення структурної зміни штреку при розробці родовища, у якому: застосовують датчик для сканування профілю штреку у певному місці штреку для сканування, головним чином, перпендикулярно до його напряму і одержують зображення першого профілю поверхонь штреку, і зберігають інформацію такого зображення першого профілю в запам'ятовуючому пристрої, пізніше одержують зображення другого профілю поверхонь штреку, головним чином, перпендикулярного до напряму штреку у певному місці в штреці, що, головним чином, співпадає з місцем, де було одержано зображення першого профілю, і одержують інформацію такого другого зображення, співставляють збережену інформацію зображення першого профілю з інформацією зображення другого профілю, визначають із зареєстрованої інформації зображення першого профілю та зображення другого профілю будь-яку структурну зміну поверхонь штреку. 2. Спосіб за п. 1, який відрізняється тим, що датчик для сканування штреку встановлюють на рухомому пристрої штреку гірничого комбайна і зображення першого профілю одержують спереду рухомого пристрою штреку, а зображення другого профілю одержують позаду рухомого пристрою штреку в момент часу, коли заднє положення, головним чином, співпадає з положенням в штреці, де було одержано зображення першого профілю. 3. Спосіб за п. 2, який відрізняється тим, що застосовують передній сканувальний датчик для сканування першого профілю в передньому поло 2 (19) 1 3 88712 4 12. Спосіб за п. 2, який відрізняється тим, що зображення переднього положення та зображення заднього положення одержують від сканувальних датчиків типу, який включає 2-вимірні або 3вимірні сканувальні датчики. 13. Спосіб за п. 7, який відрізняється тим, що датчик відстані вибирають з датчиків типу, який включає 2-вимірні або 3-вимірні сканувальні датчики, і у якому величину віддалення визначають як величину переміщення. 14. Спосіб за п. 13, який відрізняється тим, що датчик відстані сканує в напрямі, який наближається до напряму віддалення рухомого пристрою штреку. 15. Спосіб за п. 14, який відрізняється тим, що величину віддалення визначають обробкою інформації від датчика для сканування профілю, використовуючи спосіб кореляції або геометричний спосіб. 16. Пристрій для визначення структурної зміни штреку при розробці родовища, який має: сканувальний прилад для надання інформації зображення першого профілю поверхонь штреку у певному місці штреку і, головним чином, для сканування перпендикулярно до напряму штреку, а пізніше - інформації зображення другого профілю поверхонь штреку, головним чином, у тому ж місці штреку, як і у випадку першого зображення і, головним чином, при скануванні перпендикулярно до напряму штреку, запам'ятовуючий пристрій для зберігання інформації зображення першого профілю, засоби порівняння для співставлення інформації зображення профілю, збереженої в запам'ятовуючому пристрої, з інформацією зображення другого профілю, де місце другого зображення співпадає з місцем, де одержано перше зображення, процесор для виявлення відмінностей для надання можливості реєстрації відмінностей в інформації першого зображення та другого зображення, завдяки чому може визначатися структурна зміна штреку. 17. Пристрій за п. 16, який відрізняється тим, що у ньому сканувальний пристрій виконаний з можливістю встановлення на рухомому пристрої так, що сканувальний датчик буде розташований у його передньому положенні для одержання першого зображення, а другий сканувальний датчик у його задньому положенні для одержання другого зображення. 18. Пристрій за п. 17, який відрізняється тим, що він має датчик відстані для визначення величини переміщення рухомого пристрою штреку та процесор для обробки інформації про величину переміщення, визначеної за допомогою відстані між місцем переднього зображення та місцем заднього зображення, для визначення точки, де місце заднього зображення, головним чином, співпадає з місцем переднього зображення так, що згадані засоби порівняння можуть співставляти інформацію зображення профілю. 19. Пристрій за п. 18, який відрізняється тим, що він має процесор для обробки інформації зображень у місці переднього зображення та місці заднього зображення для визначення будь-якої зімни траєкторії або розміщення у місці, де одержано друге зображення відносно місця, де одержано перше зображення, і для коригування інформації зображень для обчислення будь-якої такої зміни перед обробкою згаданим процесором для визначення відмінностей зображень. 20. Пристрій за п. 18, який відрізняється тим, що він має компаратор для порівняння інформації першого зображення з інформацією зареєстрованого другого зображення шляхом накладання обох зображень. 21. Пристрій за п. 16, який відрізняється тим, що він має порогову схему, де будь-яка відмінність в інформації зображень ініціює вихідний сигнал при перевищенні відмінністю порогової величини. 22. Пристрій за п. 21, який відрізняється тим, що він має попереджувальний пристрій для надсилання попередження при перевищенні відмінністю порогової величини. 23. Пристрій за п. 16, який відрізняється тим, що сканувальний пристрій для надання зображень вибраний серед сканувальних пристроїв типу, який включає 2-вимірні або 3-вимірні сканувальні датчики. 24. Пристрій за п. 18, який відрізняється тим, що датчик відстані вибраний серед датчиків, які включають 2-вимірні або 3-вимірні сканувальні датчики відстані. 25. Пристрій за п. 16, який відрізняється тим, що сходження поверхонь штреку визначено із зареєстрованих відмінностей, одержаних від процесора для визначення відмінностей зображень. Цей винахід відноситься до способу та пристрою для контролю структурної зміни штреку при розробці родовища і, зокрема, відноситься, проте не виключно, до застосування в способах розробки довгими забоями, наприклад тими, що використовуються для видобування вугілля. Розробка родовища довгими забоями є одним з найбільш ефективних способів виймання вугілля з під землі, де великий шар вугілля, обмежений виробками (штреками), виймається за допомогою механізованого виймального пристрою. Штреки забезпечують доступ для обладнання і персоналу, і є суттєвими для процесу розробки довгими забоями. Нормальний процес розробки довгими забоями включає виймання продукту з поверхні продуктового пласту з одночасним поступовим віддаленням в напрямі штреку. Таким чином, в ході розробки родовища гірничий комбайн рухається вниз по штреку і має з собою виймальний пристрій, що виймає продукт з продуктового шару. 5 Рух в шар продукту в напрямі штреку називається "віддалення". Штреки зазвичай входять в шари перед вийманням продукту з продуктового шару та продуктового пласту і передбачені для довготривалого збереження структурної цілісності. Процес виймання продукту з продуктового шару може, однак, створювати великі напруження на ділянках, які оточують штреки. Ці напруження, у свою чергу, можуть призводити до локальних зміщень поверхонь штреків, таких як розрив, формування куполу покрівлі, відшаровування та розтріскування, які зазвичай легко виявляються неозброєним оком і можуть належним чином ідентифікуватися. Однак, напруження створюють інші локальні структури в штреках, які можуть призводити до деформування протягом часу усієї структури штреку. Ця деформація відома як сходження пластів. Сходження пластів представляє невидиму та небезпечну форму індукованої напруженнями деформацію штреку, оскільки вона зазвичай відбувається зі швидкістю, яка непомітна для неозброєного людського ока, і це ускладнює виявлення. Неможливість виявлення сходження пластів штреку може призводити до обвалу та руйнування самих штреків і може призводити до реальних небезпек травмування персоналу і ушкодження обладнання. В минулому сходження пластів визначалось шляхом використання екстензометра, який поміщається в спеціальні точки в штреці для вимірювання в різні моменти часу відстані між стелею та підлогою штреку. Спосіб залежить від ручної експлуатації екстензометра і є інтрузивним, і часто вимагає виконання на небезпечній ділянці. Доки вручну екстензометром не виконають вимірювання, доти оператор не зможе виявити надмірне сходження, яке призводить до небезпечної ситуації. Окрім того, такі способи можуть бути перешкодами для нормального проходження в штреці рухомого пристрою гірничої виймальної установки, використовуваної для виймання продукту з продуктової поверхні. Тому, задачею представленого винаходу є надання способу та пристрою для контролю структурної зміни штреку, що усуває одну або більшу кількість вищезгаданих проблем. Згідно з першим широким аспектом винаходу надається спосіб визначення структурної зміни штреку при розробці родовища, у якому: використовують датчик для сканування профілю штреку в його певному місці для головним чином сканування перпендикулярно до напряму штреку і одержують зображення першого профілю поверхонь штреку і зберігають інформацію такого зображення першого профілю в запам'ятовуючому пристрої, пізніше одержують зображення другого профілю поверхонь штреку, головним чином перпендикулярного до напряму штреку у його певному місці, що головним чином співпадає з місцем, де було одержане зображення першого профілю, і одержують інформацію такого другого зображення, 88712 6 співставляють збережену інформацію зображення першого профілю з інформацією зображення другого профілю, визначають будь-яку структурну зміну поверхонь штреку із зареєстрованої інформації зображення першого профілю та зображення другого профілю. Згідно з другим широким аспектом винаходу, надається пристрій для визначення структурної зміни штреку при розробці родовища, який має: сканувальний пристрій для надання інформації зображення першого профілю поверхонь штреку у його певному місці, головним чином перпендикулярного до його напряму, а пізніше інформації зображення другого профілю поверхонь штреку, головним чином у тому ж його місці що й при першому скануванні і головним чином перпендикулярного до напряму штреку, запам'ятовуючий пристрій для зберігання інформації зображення першого профілю, засоби порівняння для співставлення інформації зображення профілю, збереженої в запам'ятовуючому пристрої з інформацією зображення другого профілю, де місце другого зображення співпадає з місцем, де було одержано перше зображення, процесор для визначення відмінностей зображень для надання можливості визначення відмінностей в інформації першого зображення та другого зображення, завдяки чому може визначатися структурна зміна штреку. Для того, щоб винахід міг бути більш ясно визначеними прикладами варіантів його виконання, він тепер буде описуватися з посиланням на супровідні креслення, на яких: Фігура 1 зображає схематичний вид, який показує 3-вимірний вигляд з вирізом процесу виймання вугілля з під землі (без дотримання масштабу), Фігура 2 зображає вид вертикального перерізу, проведеного крізь штрек, який показує структурну зміну з часом профілю стінок штреку і/або стелі, Фігура 3 зображає вид зверху штреку довгого забою, Фігура 4 зображає типовий профіль поперечного перерізу штреку, як він просканований датчиком профілю в декартовій системі координат, Фігура 5 зображає функціональну блок-схему, яка показує етапи способу в одному варіанті виконання винаходу, Фігура 6 зображає функціональну блок-схему, яка показує етапи способу для визначення величини віддалення, Фігура 7 зображає вид вертикального перерізу штреку, який показує в ньому рухомий пристрій, і Фігура 8 зображає блок-схему фізичних компонентів апаратних засобів для визначення структурної зміни штреку. Фігура 1 зображає схематичний вид, який показує 3-вимірний вид з вирізом процесу виймання вугілля з під землі довгими забоями (без дотримання масштабу). Тут, надається виймальний комбайн 101 для розробки довгими забоями, що рухається з сторони в сторону поперек вугільного шару 103 у вугільному пласті 105. На кожній сто 7 роні вугільного пласту 105 виконуються прямокутні виробки, відомі як штреки 107. Штреки 107 входять в шари і/або вугільний пласт 105 так, що їх напрям та розмір відповідають точним параметрам, таким як розмір, положення в просторі і напрям. Типово, штреки 107 проходять паралельно один до іншого. В одному або більшій кількості штреків 107 передбачається рухомий пристрій 109. Механічне з'єднання 111 з'єднує рухомий пристрій 109 штреку та виймальний комбайн 101. Типово, механічне з'єднання 111 є рейковими засобами, по яким може рухатися виймальний комбайн 101. Рухомі пристрої 109 штреку формують частину виймальної установки, пов'язаної з розробкою родовища, і вони припускають конкретне місце віддалення в штреках 107 під час розробки родовища. Виймальний комбайн 101 рухається назад і вперед по рейковим засобам, які формують механічне з'єднання 111. При русі виймального комбайну 101 з вугільного шару 103 виймається вугілля. Після переміщення виймального комбайну 101 з однієї сторони в іншу вугільного шару 103, рухомі пристрої 109 штреку переміщаються в напрямі стрілок 113, таким чином переводячи виймальний комбайн 101 в положення для подальшого виймання вугілля із свіжої поверхні вугільного шару 103. Вищезгаданий процес повторюють, рухаючи поверхню до повного виймання вугільного пласту 105. Пристрій для розробки родовищ довгими забоями вищезгаданого типу є добре відомим. Фігура 2 зображає вид вертикального перерізу, проведеного крізь штрек 107. Тут, штрек 107 має підлогу 201, стелю 203 та дві вертикальні бічні стінки 205 та 207. Бічна стінка 207 безпосередньо примикає до вугільного пласту 105, тоді як вертикальна бічна стінка 205 примикає до оточуючих шарів і віддалена від вугільного шару 103, який необхідно вийняти. Для ілюстрації, пунктирна лінія 209 показує підсилений характер сходження, що мав місце в штреці 107. Цей характер сходження представляє структурну зміну в штреці 107 під час розробки родовища. Тут, можна побачити, що найвищий кут 211 головним чином зберіг свою цілісність і в ньому не відбулося надмірної структурної зміни. Це пояснюється тим, що верхній кут 211 віддалений або дальній від видобутого вугільного шару 103. Таким чином, кут 211 головним чином утримується оточуючими шарами. З іншого боку, кут 213 вугільного шару зображений в значній мірі деформованим. Ця структурна зміна відбулася по причині виймання вугільного шару 103 з сусідньої вертикальної бічної стінки 207. Пунктирна лінія 209 показує деформацію бічних стінок 205 і 207, і головну зміну форму стелі 209. Підлога 201 може також змінюватися, проте головним чином в меншій мірі, а ніж бічна стінка 207 та стеля 203. Таким чином, з Фігури 2 можна побачити, що профіль стелі штреку 107 та поверхонь бічних стінок змінилися: ця зміна може представляти небезпечну ситуацію для персоналу і/або шахтного обладнання. Сходження, як це показано на Фігурі 2, може відображати неминуче руйнування штреків 107 і/або обвал шарів з утворенням завалу. Тому, це 88712 8 сходження є структурною зміною поверхонь штреку 107. Фігура 3 зображає вид зверху одного штреку 107 довгого забою вздовж вугільного пласту 105, який показує положення рухомого пристрою 109 штреку. Механічне з'єднання 111, показане на Фігурі 1, було виключено для ясності. Фігура 3 зображає напрям руху, відомого як віддалення 113. Фігура 3 також показує, що рухомий пристрій 109 знаходиться в штреці 107 відносно вугільного шару 103. Рухомий пристрій 109 штреку може переміщатися в напрямі руху/віддалення 113 відомими способами у відповідь на роботу виймального комбайну 101, який завершує виймання вугільного шару 103. Рухомий пристрій 109 штреку має датчик 301 для сканування профілю штреку попереду в напрямі свого руху. Ще є другий датчик 303 для сканування профілю штреку позаду рухомого пристрою штреку. Фігура 3 показує використання двох датчиків 301 та 303 для сканування профілю штреку для надання переднього зображення та заднього зображення. Переважний варіант виконання не вимагає прокладання передбаченого рейкового шляху або спеціалізованих рейкових конструкцій в штреці 107 для надання можливості визначення профілів штреку. Замість цього датчики 301, 303 для сканування профілю штреку безпосередньо встановлюються на рухомий пристрій 109 штреку, який вже присутній в ньому як частина процесу розробки родовища, представляючи важливу практичну перевагу з точки зору простоти втілення системи. Однак, в деяких варіантах виконання може бути бажаним мати єдиний загальний датчик для сканування профілю штреку, що може переміщатися, наприклад, на обертальній пластині для досягання переднього положення та заднього положення відносно рухомого пристрою 109 штреку, таким чином використовуючи єдиний датчик для переднього зображення та заднього зображення. У цьому конкретному варіанті виконання, надаються два окремі датчики 301, 303 для сканування профілю штреку для одержання зображення переднього профілю та відповідно зображення заднього профілю. Датчики 301, 303 для сканування профілю штреку розташовані один від іншого на віддалі "d". Кожен з датчиків 301, 303 для сканування профілю штреку встановлений для головним чином сканування перпендикулярно до напряму руху для одержання зображень профілю однієї або більшої кількості поверхонь підлоги, стінки та стелі штреку. Це вказано на Фігурі 3 лініями 305 та відповідно 307 сканування. Датчики 301, 303 для сканування профілю штреку є типово сканувальними датчиками 2-вимірного або 3вимірного типу. Вони включають лазерні та радарні датчики і можуть включати виявлення об'єднаного діапазону та підповерхневої ознаки (радар, який проглядає крізь ґрунт), і/або датчики зображення, такі як камери, які працюють із спектром випромінювання, видимим для людини, або теплові інфрачервоні камери. Окрім того, не дивлячись на те, що був показаний єдиний датчик 301, 303 для сканування профілю штреку в кожному передньому та задньому положеннях 305, 307, тут 9 може бути певна кількість таких датчиків в кожному з таких місць. Датчики 301, 303 сканують в площині, переважно перпендикулярній до напряму віддалення 113. В деяких випадках площина сканування може бути трохи нахиленою відносно перпендикулярної площини без впливу на процес визначення структурної зміни штреку. Фігура 3 зображає додатковий сканувальний датчик 309, встановлений на рухомому пристрої 109 штреку. Цей особливий датчик 309 використовується як датчик визначення величини переміщення. Застосування сканувального датчика 309 для визначення величини переміщення об'єктів, таких як роботи або подібне, гарно описане в багатьох роботах, таких як, наприклад, S Thrun. Robotic Mapping: A Survey. In G. Lakemeyer and B. Nebel, editors. Exploring Artificial Intelligence in the New Millenium. Morgan Kaufman 2002. Таким чином, у цьому варіанті виконання використовується сканувальний датчик для визначення величини переміщення. Типово, датчик 309 може бути 2вимірним лазерним датчиком, але й може бути 3вимірним лазерним датчиком або іншим придатним датчиком. Окрім того, може використовуватися будь-який вищезгаданий тип датчиків для сканування профілю. У варіанті виконання з Фігури 3 датчик 309 встановлений спереду на рухомому пристрої 109 штреку. Це є зручним місцем, проте не обмежується місцем датчика 309 на рухомому пристрої 109 штреку. Датчик 309 встановлюється для сканування спереду в штреці 107, як це показано пунктирною ділянкою сканування 311, однак, він міг би сканувати ззаду без впливу на роботу датчиків 301, 303 для виявлення структурної зміни штреку. Сканування виявляє особливі ознаки профілю і за допомогою відповідної обробки сигналів зображення обраховує величину переміщення. Процес обрахунку цієї відстані сам по собі не формує частину основної ідеї винаходу. Відповідно, під час розробки родовища передній сканувальний датчик 301 сканує поверхні штреку 107. Пізніше, коли рухомий пристрій 109 штреку пройшов вздовж нього відстань, яка дорівнює величині "d", задній сканувальний датчик 303 буде в тому ж місці, де виконувалось попереднє сканування датчиком 301 для сканування переднього профілю. Таким чином, сканування, виконані обома датчиками у такому місці, можуть використовуватися для визначення будь-якої структурної зміни в штреці під час розробки родовища. Інформація від сканування датчика 309 для вимірювання відстані використовується для визначення величини переміщення, таким чином дозволяючи співставлення зображень від переднього сканувального датчика 301 із зображеннями від заднього сканувального датчика 303 у тому ж місці. Хоча датчик 309 зображений на рухомому пристрої 109 штреку для визначення величини віддалення або величини переміщення рухомого пристрою 109 штреку, можуть використовуватися інші форми визначення величини його переміщення. Наприклад, простий лінійний вимірювальний пристрій, такий як градуйований тросик, може використовуватися для визначення величини пере 88712 10 міщення в напрямі віддалення. Виміряна відстань може потім використовуватися для співставлення двох зображень. Альтернативно, в окремих місцях вздовж штреку 107 можуть встановлюватися активатори розпізнавання наближення об'єкта. Датчик може знаходитися на рухомому пристрої 109 штреку, який працює біля цих активаторів для ініціювання сигналів для відображення спеціальної величини переміщення. Фігура 4 зображає типовий просканований профіль, одержаний від одного з датчиків 301, 303 для сканування профілю штреку. Припускається, що датчики 301, 303 мають досить високу роздільну здатність, область сканування та швидкість сканування для надання корисних даних профілю поверхонь штреку. При визначенні зміни штреку описана тут система вимагає тільки, щоб структура штреку головним чином була стійкою протягом періоду руху рухомого пристрою 109 штреку. Ця вимога головним чином легко виконується, коли швидкість зміни штреку є набагато меншою за часовий період визначення профілю. Під час розробки родовища рухомий пристрій 109 штреку переміщається протягом коротких періодів часу на короткі відстані з довгими інтервалами перебування в нерухомому стані між ними. Наприклад, рухомий пристрій 109 штреку може переміщатися на один метр за п'ять секунд в напрямі віддалення 113. Він може пізніше становити декілька годин перед тим, як рухомий пристрій 109 штреку знову буде рухатися вперед в напрямі віддалення 113. Швидкості сходження штреку типово є малими. Наприклад, сходження величиною 50мм протягом одного тижня поблизу місця активних робіт може насправді створювати прийнятний стійкий штрек 107. Однак, якщо існує швидше сходження, то потім це може вказувати на ймовірність нестійкої та небезпечної ситуації. Цей варіант виконання включає робочу порогову величину, що може базуватися на інформації попередньо встановленого дозволеного безпечного профілю для шахти. Таким чином, якщо зображення, одержані від переднього сканувального датчика 301 і заднього сканувального датчика 303, відрізняються величиною, більшою за порогову величину, то може надаватися вихідне попередження. Посилаючись тепер на Фігуру 5, бачимо функціональну блок-схему різних етапів процесу, використовуваних для визначення структурної зміни штреку у цьому варіанті виконання. Процес стартує в блоці 501. На етапі 503 зображення одержується від датчика 309 положення і передається на етап 505, де визначається величина віддалення. Потім сигнал величини віддалення надсилається через етап 507 до системи контролю гірничого комбайну. Величина віддалення також обробляється в компоненті 509 прийняття рішення для визначення, чи була зміна у величині віддалення. Якщо відповідь є "НІ", то процес повертається на етап 503. Якщо відповідь є "ТАК", то потім одержують зображення від датчиків 301, 303 профілю і зберігають в запам'ятовуючому пристрої на етапі 513. На етапі 515 одержані зображення від датчиків 301, 303 співставляються так, що місце зображення від сканувального датчика 303 відповідають 11 місцю зображень, одержаних від датчика 301 у тому ж місці вздовж штреку 107. Іншими словами, коли датчик 303 змістився вздовж напряму віддалення 113 на відстань "d" в точку, де вона співпадає з місцем, де від датчика 301 попередньо було одержано зображення, то потім відбувається співставлення. На етапі 517 зображення датчика є суміщаються для коригування будь-якої зімни (внаслідок зсуву або інших факторів, що можуть мати місце) для відносного розміщення рухомого пристрою 109 штреку під час проходження ним відстані "d". Цей аспект буде далі належним чином пояснюватися. Два профілі сканування, які є профілем від датчика 301 та датчика 303, потім надсилаються на етап 519, де сигнали профілю віднімаються один від іншого для реєстрації будь-якої зміни. Результат цього віднімання представляє міру сходження. Хоча й було зазначено, що сигнали віднімались один від іншого, можуть втілюватися інші форми обрахування зміни. Наприклад, час, необхідний для проходження заднім датчиком 303 відстані "d", може реєструватися разом з диференціальною зміною в профілі. Це, у свою чергу, може представляти часовий норматив зміни і може використовуватися для прогнозування руйнування штреку 107 або оточуючих шарів. Будь-які відмінності або сходження можуть надсилатися для статистичного зберігання на етапі 523 так, що пізніше можна посилатися на результати. Будь-яка відмінність (сходження) потім надсилається до компонента 525 прийняття рішення для визначення того, чи перевищує відмінність (або величина відмінності) порогову величину. Ця порогова величина може вибиратися відносно відомих або очікуваних змін відмінностей даних безпечного профілю для конкретної шахти. Якщо процес прийняття рішення визначає, що порогова величина не була перевищена, то тоді процес повертається на етап 503. Якщо процес прийняття рішення визначає, що порогова величина була перевищена, то тоді на етапі 527 може надсилатися сигнал попередження. Одночасно, процес може повертатися на етап 503. Слід розуміти, що на етапі 519 будь-які відмінності можуть відображатися на екрані монітору так, що оператор може негайно оглядати його і визначати сходження візуальною перевіркою нього. Таким чином, на основі огляду така особа може потім індивідуально здійснити захід. Посилаючись тепер на Фігуру 6, бачимо функціональну блок-схему етапів процесу, які використовуються при визначенні величини віддалення вздовж напряму віддалення 113. Тут, 2-вимірний або 3-вимірний датчик, такий як 2-вимірний лазерний датчик, встановлюється на рухомому пристрої 109 штреку. Цей датчик вказаний на Фігурі 3 як датчик 309. Однак, він може включати використання датчика 301 положення (а також використання датчика 301 для сканування профілю). Датчик 309 надає інформацію про відстань від нього до поверхонь штреку. Типово, він має розгортку, що охоплює понад 180° області сканування. Застосовувана швидкість одержання становить 25-30 зображень в секунду. Як вказувалось перед цим, 88712 12 може використовуватися будь-який тип датчика і конкретний датчик не є спеціальним для цього втілення. Можуть застосовуватися будь-які відомі способи визначення (інкрементного) руху та відстані переміщення платформи з використанням датчика. Вони можуть використовувати форму порівняння еталонного зображення з поточним на основі наступного: Зміна в положенні і/або орієнтації датчика відповідає зміні переміщення і/або обертання в просканованому діапазоні. Інкрементний рух може відслідковуватися обрахунком спеціальних компонент переміщення і/або будь-якого обертання, необхідних для узгодження попередньо одержаного зображення з поточним зображенням. Поточне положення і/або орієнтація в даний момент часу потім відслідковуються накопиченням компонентів інкрементного переміщення та обертання. Фігура 6 зображає чотири допоміжні етапи, використовувані при визначенні місцезнаходження рухомого пристрою 109 штреку з використанням наближення лазерного вимірювання. Тут, система починає працювати на етапі 601. На етапі 603 зчитується поточне зображення з датчика 305 положення. На етапі 605 приймається рішення, чи було вже здійснено сканування, тобто чи "закінчився перший період часу?". Якщо відповідь є "ТАК", то на етапі 607 система визначає поточне зображення як еталонне зображення і повертається на етап 603 для зчитування наступного зображення з датчика положення. Якщо відповідь є "НІ", то потім система починає з етапу 609 для обрахунку інкрементних відмінностей сканування. Тут, система обраховує відмінності переміщення і/або обертання (якщо таке є) між поточним зображенням та еталонним зображенням для визначення будь-якої інкрементної зміни в положенні і/або орієнтації рухомого пристрою 109 штреку, що могла відбутися між сусідніми зображеннями датчика положення. Існує багато відомих способів для ідентифікації цього процесу. Найбільш поширені серед них є кореляція зображень і ітераційний алгоритм визначення найближчої точки (ІСР). Інше наближення, відоме як одночасна локалізація та відображення (SLAM), може використовуватися, якщо сигнали датчика положення від сканувань є шумними. Точний процес не є важливим для ідеї винаходу. Наближення на основі кореляції зображення є найбільш використовуваним, коли основна компонента руху орієнтована в напрямі віддалення 113. Через великий розмір та масу рухомого пристрою 109 штреку можна припустити, що цей рух буде відбуватися головним чином в напрямі віддалення 113. Зміщення та орієнтація також змінюються, проте типово змінюються тільки до малої степені порівняно з рухом в напрямі віддалення 113. В наближенні на основі кореляції одержується чиста зміна переміщення між еталонним зображенням та поточним зображенням на єдиному стандартному етапі кореляції. Через те, що датчик 309 одержує інформацію у вигляді даних в декартовій системі координат, будь-які зміни в русі, одержані в кореляції еталонного зображення з поточним зображенням, можуть безпосередньо пов'язуватися з 13 інкрементною зміною в положенні рухомого пристрою 109 штреку. Наближення на основі кореляції використовується там, де встановлений датчик 309 положення для забезпечення області сканування, паралельної відносно напряму віддалення 113. Якщо застосовується ітеративне наближення, то алгоритм ІСР визначає віддалення та зміщення рухомого пристрою 109 штреку. ІСР є головним ітеративним коригувальним алгоритмом, що працює шляхом оцінки обертання та переміщення твердого тіла, що найкраще відображає перше зображення на друге, і застосовує таке перетворення до першого зображення. Потім процес повторно застосовують з ітераціями до збіжності ІСР. Інкрементні зміни переміщення та обертання одержують після збіжності ІСР і вони можуть безпосередньо пов'язуватися з інкрементними змінами в положенні рухомого пристрою 109 штреку. Алгоритм ІСР рекомендується там, де встановлений датчик положення для забезпечення області сканування, поперечної відносно напряму віддалення 113. Точність визначення віддалення може покращуватися наданням варіанту для ігнорування дуже малих інкрементних змін у зображеннях віддалення, які одержуються із сходження штреку. Відмінності диференційних зображень, одержаних на етапі 609, спершу порівнюють з попередньо визначеною пороговою величиною мінімальної зміни положення на етапі 613 на основі очікуваного руху рухомого пристрою 109 та швидкості сходження. Якщо інкрементна відмінність зображення, обрахована на етапі 609, перевищує наперед визначену порогову величину інкрементної зміни, то потім вважається, що рухомий пристрій 109 рухається, а обробка починається з етапу 611; іншим чином система починає працювати з етапу 607 і повертається до зчитування інформації датчика на етапі 603. Етап 613 порівняння інкрементної зміни може застосовуватися там, де рухомий пристрій 109 штреку залишається нерухомим протягом довгих періодів часу при наявності значного сходження штреку. Якщо не існує конкретної інформації стосовно сходження або динаміки рухомого пристрою штреку, то потім порогова величина на етапі 613 може просто встановлюватися рівною нулю, а інкрементні зміни, одержані на етапі 609, будуть оброблятися на етапі 611. На етапі 611 накопичені інкрементні відмінності зображень визначаються сумуванням інкрементних компонентів переміщення, як це обраховано на етапі 609. Компоненти обертання можуть, якщо це необхідно, одержуватися подібним чином. Визначення величини віддалення потім використовується для індексування та співставлення інформації сигналу зображення від переднього та заднього датчика для обрахунку сходження штреку. В деяких рідких випадках, де наближення лазерного датчика положення не прийнятне, незалежне визначення місцезнаходження може здійснюватися іншими способами. Одним способом є застосування інерціальної навігаційної системи 88712 14 високої точності або іншої системи, такої як система датчику близькості, як це було попередньо обговорено. Слід зазначити, що етап 517 з Фігури 5 вимагає, щоб існувала співвісність між переднім та заднім профілями зображення датчика шляхом відносного розміщення. Обрахунок сходження базується на припущенні, що інформаційні сигнали сканувального датчика спостерігають від одного і того ж місця в різні моменти часу. Таким чином, припускається, що відносна траєкторія та розміщення переднього та заднього сканувального датчика співпадають між собою. Тому, припускається, проте це не суттєво, що траєкторія заднього датчика 303 майже відповідає траєкторії та розміщенню переднього датчика 301. Для розробки довгими забоями це є зазвичай випадком внаслідок відносно малої відстані між двома датчиками 301, 303 (типово 5-30 метрів), а також сильно обмеженої і повільної динаміки рухомого пристрою 109 штреку. У цьому випадку, який є ідеальним, можна припустити, що не вимагається співставлення сигналів профілю, одержаних від переднього датчика та заднього датчиків 301, 303. Однак, в деяких випадках, сигнали, одержані від датчиків профілю, можуть мати малі зміни у відносних положеннях та орієнтації/розміщенні по ділянці величиною "d" руху рухомого пристрою 109 штреку. Таким чином, датчики 301, 303 будуть оглядати поверхню штреку з іншої точки огляду. Малі зміни можуть легко коригуватися (якщо потрібно) одним з наступних способів. 1. Експлуатація природно нерухомих геологічних структур Було виявлено, що верхній кут 211 (дивіться Фігуру 2) штреку 107 геологічно стійкий і може зберігати структурну цілісність протягом довгих періодів часу: часто протягом багатьох місяців. Цей кут 211 легко видимий в інформації зображення датчика для сканування профілю штреку і може використовуватися як орієнтир для окремої оцінки розміщення датчика для сканування профілю. Такий спосіб застосовується у випадку, де очевидна мала зміна в розміщенні датчика. Фігура 7 зображає конфігурацію. Положення та орієнтація самого верхнього кута 211 може одержуватися за допомогою стандартного застосування алгоритму ІСР (як обговорювалось попередньо) в куті, який представляє інтерес для обох зображень переднього та заднього сканувального датчика. Потім може здійснюватися необхідне коригування розміщення профілю прямим застосуванням обрахованих величин переміщення та обертання, пов'язаних із зображеннями переднього та заднього датчика на конкретному віддаленні, що представляє інтерес. Ця інформація про розміщення потім буде застосовуватися для перетворення зображення профілю заднього датчика у тій же системі координат датчика, у якій його було отримано від переднього датчика 301. Оскільки сходження відноситься до відмінностей у дальньому профілі штреку, тобто відносних, а не абсолютних відмінностей профілю, для визначення сходження достатньо обрахувати відмінність в розміщеннях профілю. 15 2. Незалежне визначення розміщення У цьому випадку, де попередній спосіб є неприйнятним, можна застосовувати інерціальні навігаційні блоки високої точності або для аргументації або для забезпечення незалежного визначення розміщень переднього та заднього датчика. Аналогічний спосіб компенсації, як він зазначений вище, подібним чином застосовується до заднього датчика 303, де величина переміщення та обертання, застосована до інформації профілю заднього датчика, надається різницею у розміщенні переднього та заднього датчика. На етапі 519 з Фігури 5 обраховують відмінності профілів. Тут, сходження визначається обрахунком алгебраїчної різниці серед усіх налягаючих зображень профілю поверхні штреку, іншими словами, зображення переднього та заднього профілю від відповідних датчиків 301, 303, що мають однакове положення. На відміну від традиційних способів визначення єдиної точки сходження це наближення обраховує сходження по усіх поверхнях, забезпечуючи значне покращення якості та кількості інформації для оцінки профілю штреку. Перевага у використанні лазерного датчика полягає в тому, що обрахунок сходження представляє реальне зміщення в штреку 107. В ідеальному випадку, де в штреку зберігається структурна цілісність, сходження буде нульовим. Однак, головним чином буде відбуватися деформація і, таким чином, сходження не буде нульовим. Інші форми забезпечення структурної зміни штреку можуть використовуватися там, де, наприклад, можуть використовуватися абсолютні відмінності та кореляція зображення. В переважному прикладі процес віднімання використовується для реєстрації відмінностей в сигналах інформації від переднього датчика 301 та заднього датчика 303. На етапі 525 Фігури 5 цілісність штреку і/або оцінка структурної зміни штреку можуть контролюватися встановленням перевищення значеннями відмінностей або інтенсивністю наперед визначеної порогової величини. Така порогова величина може застосовуватися до конкретної шахти стосовно відомих в минулому порогових рівнів, де може очікуватися стійкість і/або, де стійкість може ймовірно порушуватися. Слід розуміти, що використовуючи сканувальний датчик для визначення величини переміщення, тобто величини віддалення, може здійснюватися точне вимірювання такої відстані. Окрім того і як вказано на Фігурі 5, на етапі 507 величина переміщення може надсилатися до існуючої системи контролю гірничого комбайну для контролю переміщення самого гірничого комбайну. Посилаючись тепер на Фігуру 8, бачимо блоксхему прикладу переважного варіанту виконання. Слід розуміти, що більшість з функціональних етапів процесу реалізується в контрольованій комп'ютером системі функціональністю розробленого для цієї цілі програмного забезпечення. Фігура 8 зображає передній сканувальний датчик 301 та задній сканувальний датчик 303. Кожен з цих датчиків має площину сканування лазерного променя, як це показано цифрою 801. Ця площина головним чи 88712 16 ном вміщує 180° сканувальної дуги і вона головним чином перпендикулярна до напряму віддалення 113. Вихідні інформаційні сигнали надсилаються до процесорів 803, де вони належним чином обробляються для видалення шуму та інших небажаних їх компонентів. Потім вихідні сигнали надсилаються в запам'ятовуючий пристрій 805. Сканувальний датчик 309 положення має розгортку 807, яка спрямовується вперед від рухомого пристрою 109 штреку в напрямі віддалення 113. Типово, цей сканер є лазерним сканером, а площина сканування нахилена вперед. Вихідні інформаційні сигнали обробляються за допомогою схеми обробки (не зображена) для видалення шуму та іншої небажаної інформації сигналів. Потім сигнали надсилаються до процесора 811 визначення величини віддалення. Потім величину віддалення обраховують пристроєм 813 для визначення величини віддалення і надсилають в порівняльну схему 813. Тут інформаційні сигнали, які представляють зображення від переднього датчика 301 та заднього датчика 303, порівнюються у тому ж самому конкретному місці сканування в штреці 107. Потім два сигнали пропускаються крізь схему 815 віднімання, де визначаються різниці між двома інформаційними сигналами зображення. Потім будь-які різницеві сигнали надсилаються до порогової схеми 817, де вони перевіряються, чи перевищують вони її діапазон або набір порогових величин інтенсивностей. Якщо різницеві сигнали перевищують порогову величину, то потім може формуватися вихідний сигнал для увімкнення аварійного пристрою 819. Результати схеми 815 віднімання також надсилаються крізь порогову схему безпосередньо до контрольної схеми 821, такої як екран монітора так, що спостерігач може фізично контролювати різницеві сигнали. Одночасно, сигнали можуть надсилатися до запам'ятовуючого пристрою 823 для запису відображення процесу. У вищеописані варіанти виконання можуть вноситися модифікації, як це повинно бути очевидним для фахівців в області контролю роботи гірничого комбайну. Наприклад, зазвичай можна контролювати сходження на конкретній відстані віддалення тільки від одного із датчиків для сканування профілю. У цьому прикладі, якщо рухомий пристрій 109 штреку не пройшов певну відстань в штреку 107, то потім зображення першого профілю може одержуватися або від переднього або від заднього датчика, а потім пізніше, зображення другого профілю може одержуватися від того ж датчика. У цьому випадку, повинна зберігатися інформація зображення першого профілю і співставлятися з інформацією від зображення другого профілю для реєстрації будь-яких відмінностей. Різницеві сигнали повинні потім оброблятися у той же спосіб як і у попередньо описаному варіанті виконання стосовно визначення того, чи перевищує різниця наперед визначений інтервал або порогову різницю інтенсивності. У цей спосіб будьяке сходження може визначатися навіть якщо сканувальні датчики не переміщаються на певну відстань вздовж напряму віддалення 113. Відповідні етапи обробки програмного забезпечення можуть належним чином повторно настроюватися для 17 забезпечення цієї обробки інформації зображення профілю. У вищезгаданому варіанті, може використовуватися єдиний сканувальний датчик для одержання зображень профілю в різні моменти часу у одному й тому ж місці в штреці. Результуюча 88712 18 інформація зображення може порівнюватися і може визначатися будь-яке сходження. Ці та інші модифікації можуть вноситися без виходу за рамки винаходу, який повинен визначатися з вищенаведеного опису та наступної формули винаходу. 19 Комп’ютерна верстка А. Рябко 88712 Підписне 20 Тираж 28 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod and apparatus for monitoring gateroad structural change
Автори англійськоюKelly Michael Shawn, Ralston Jonathan Carey, Hargrave Chad Owen
Назва патенту російськоюСпособ и устройство для контроля структурного изменения штрека
Автори російськоюКелли Майкл Шоун, Релстон Джонатон Кери, Харгрейв Чад Оуен
МПК / Мітки
МПК: E21F 17/00
Мітки: спосіб, зміни, контролю, структурної, пристрій, штреку
Код посилання
<a href="https://ua.patents.su/10-88712-sposib-ta-pristrijj-dlya-kontrolyu-strukturno-zmini-shtreku.html" target="_blank" rel="follow" title="База патентів України">Спосіб та пристрій для контролю структурної зміни штреку</a>
Пристрій для контролю форми поверхні
Номер патенту: 59549
Опубліковано: 15.09.2003
Автори: Соколов Володимир Олександрович, Плаксій Юрій Степанович
МПК: G01M 11/08
Мітки: контролю, форми, поверхні, пристрій
Формула / Реферат:
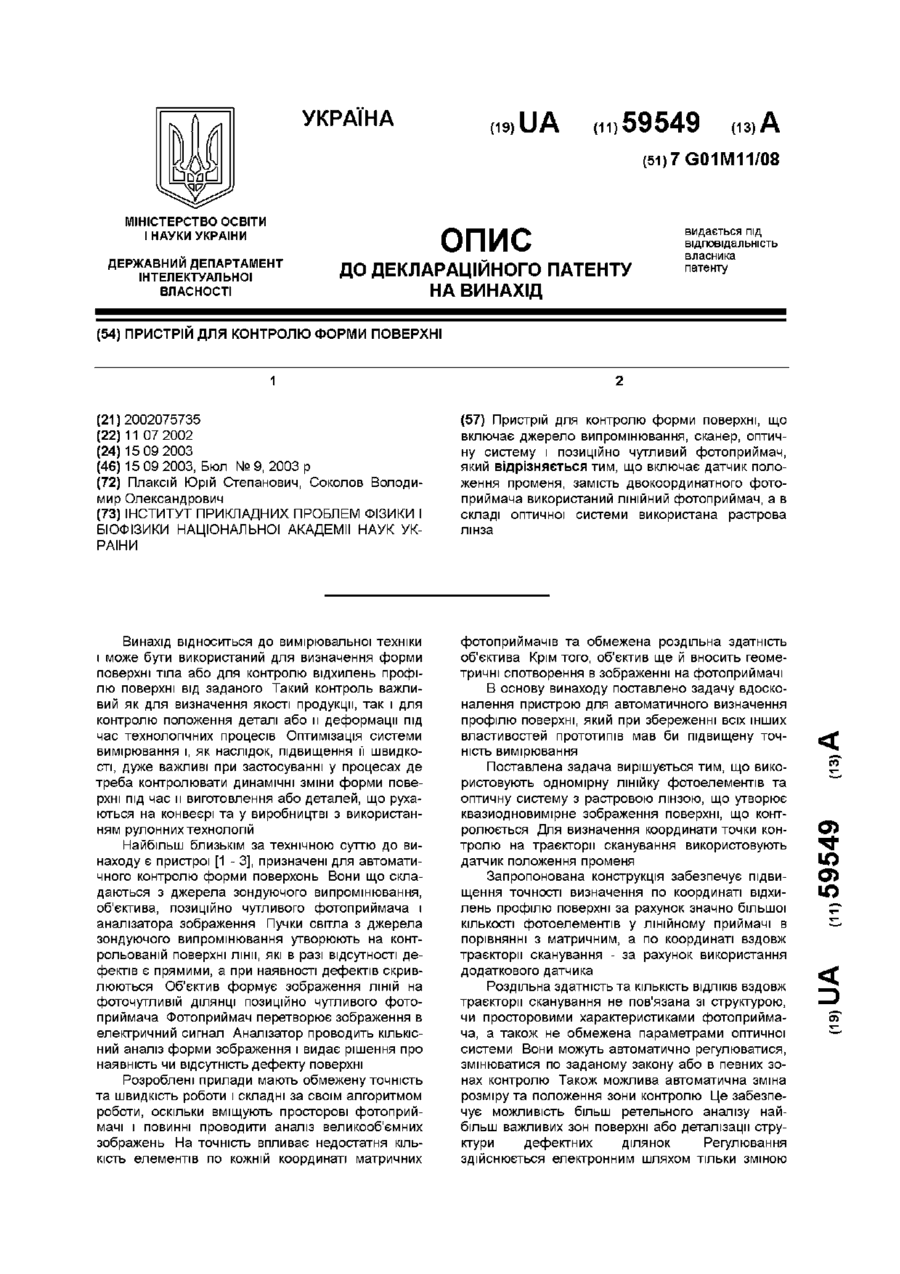
Пристрій для контролю форми поверхні, що включає джерело випромінювання, сканер, оптичну систему і позиційно чутливий фотоприймач, який відрізняється тим, що включає датчик положення променя, замість двокоординатного фотоприймача використаний лінійний фотоприймач, а в складі оптичної системи використана растрова лінза.
Пристрій для контролю зміни температури тіла
Номер патенту: 10838
Опубліковано: 15.11.2005
Автор: Парасочкіна Вікторія Володимирівна
МПК: G01K 1/08, G01K 1/00, A61B 5/01, H05B 1/02
Мітки: тіла, зміни, контролю, температури, пристрій
Формула / Реферат:
Пристрій для контролю зміни температури тіла, що містить датчик для вимірювання температури і реєструвальний прилад, який відрізняється тим, що він містить набір термодатчиків для багатоточкового контролю температури з лінійною залежністю напруги від температури, що підключені до аналого-цифрового перетворювача, до виходу якого підключений програмований мікроконтролер, який містить змінну програму та з'єднаний з рідиннокристалічним дисплеєм і...
Спосіб контролю зміни параметрів об’єкта
Номер патенту: 52992
Опубліковано: 15.01.2003
Автори: Дзюрило Анатолій Анатолійович, Бондаренко Олександр Євгеньович, Бендарик Олег Борисович, Шепурев Микола Миколайович
МПК: G01C 11/00
Мітки: об'єкта, параметрів, контролю, зміни, спосіб
Формула / Реферат:
1. Спосіб контролю зміни параметрів об'єкта порівнянням зображень об'єкта перед та після зміни параметрів, який відрізняється тим, що отримують зображення проекції об'єкта перед та після імовірної зміни параметрів на цифровій світлочутливій матриці за умови постійних координат і кутів орієнтації знімальної камери, суміщують ці зображення проекції і визначають різницю координат (х, у) проекції характерного елемента об'єкта, а саме точки,...
Спосіб дегазації тупика штреку, що гаситься
Номер патенту: 53198
Опубліковано: 15.01.2003
Автори: М'якенький Валентин Іванович, Демченко Володимир Борисович, Колесніков Володимир Григорович
МПК: E21F 7/00
Мітки: дегазації, спосіб, штреку, гаситься, тупика
Формула / Реферат:
Спосіб дегазації тупика штреку, що гаситься, який включає періодичне нанесення метаноокислювальних бактерій на обрушені у виробленому просторі породи, який відрізняється тим, що у міру посування лави по ґрунту вентиляційного штреку, що гаситься, укладають і періодично нарощують в напрямі рушення лави перфорований трубопровід, по якому відсмоктують метаноповітряну суміш з витратою в ній метану, що перевищує абсолютну багатогазність виробленого...
Спосіб контролю структурної досконалості монокристалів
Номер патенту: 14831
Опубліковано: 18.02.1997
Автори: Кютт Регінальд Ніколаєвіч, Немошкаленко Володимир Володимирович, Низкова Ганна Іванівна, Кисловський Євген Миколайович, Ковальчук Міхаіл Валєнтіновіч, Когут Михайло Тихонович, Грищенко Тарас Аркадійович, Гинько Ігор Володимирович, Шпак Анатолій Петрович, Молодкін Вадим Борисович, Оліховський Степан Йосипович, Бар'яхтар Віктор Григорович
МПК: G01N 23/20
Мітки: досконалості, контролю, спосіб, монокристалів, структурної
Формула / Реферат:
Способ контроля структурного совершенства монокристаллов, заключающийся в том, что исследуемый кристалл-образец толщиной облучают пучком рентгеновского излучения с длиной волны выбранной из условия - линейный коэффициент фотоэлектрического поглощения), осуществляют на нем лауэ-дифракцию с вектором дифракции измеряют толщинные зависимости интегральной отражательной способности образца где путем наклона образца в угловом диапазоне от...