Багатофункціональний кистьовий вузол промислового робота
Номер патенту: 24706
Опубліковано: 10.07.2007
Автори: Кондратенко Володимир Юрійович, Чернов Сергій Костянтинович, Марковський Ігор Володимирович, Шишкін Олександр Сергійович, Кондратенко Юрій Пантелійович
Формула / Реферат
Багатофункціональний кистьовий пристрій промислового робота, що містить дві пари захватних органів, основу, корпус, привід захватних органів, кінематично з'єднаний з гвинтовою парою, та зовнішній і внутрішній порожнинні циліндричні елементи, встановлені коаксіально гвинту гвинтової пари, кожний затискний елемент першої пари захватних органів за допомогою відповідної пари шарнірно закріплених паралельних тяг кінематично зв'язано з гайкою гвинтової пари, а кожний затискний елемент другої пари захватних органів - з внутрішнім циліндричним елементом, в одній з тяг кожної пари паралельних тяг виконано паз у вигляді прорізу, у якому розташовано напрямний штир, який змонтовано для паралельних тяг першої пари захватних органів на корпусі, а для паралельних тяг другої пари захватних органів - на зовнішньому циліндричному елементі, при цьому в корпусі й у циліндричних елементах виконано пази у вигляді прорізів для проходу захватних органів й обидва циліндричні елементи підпружинено відносно корпусу, який відрізняється тим, що кожна не зв'язана з напрямним штирем тяга відповідної пари паралельних тяг виконана з можливістю регулювання її довжини у вигляді підпружиненого штока та циліндричного порожнинного стакана, одна торцева поверхня якого для паралельних тяг першої пари захватних органів з'єднана з відповідним шарніром гайки гвинтової пари, а для паралельних тяг другої пари захватних органів - з відповідним шарніром внутрішнього циліндричного елемента, при цьому в іншій торцевій поверхні циліндричного порожнинного стакана виконано отвір, через який шток тяги зв'язано з шарніром відповідного затискного елемента першої та другої пари захватних органів, на кінці кожного штока, розміщеного в порожнині відповідного циліндричного стакана, закріплено обмежувальний фіксатор, виконаний у вигляді пластини, площа якої перевищує величину площі отвору у відповідній торцевій поверхні циліндричного стакана, в порожнині кожного циліндричного стакана розміщено пружний елемент, за допомогою якого обмежувальний фіксатор підпружинено відносно внутрішньої безотвірної торцевої поверхні порожнинного циліндричного стакана, кожний шток встановлено з можливістю зворотно-поступального руху в порожнині відповідного циліндричного стакана, крім того, паз у вигляді прорізу для кожної пари паралельних тяг першої пари захватних органів виконано у відповідних лівих тягах, а для кожної пари паралельних тяг другої пари захватних органів - у відповідних правих тягах.
Текст
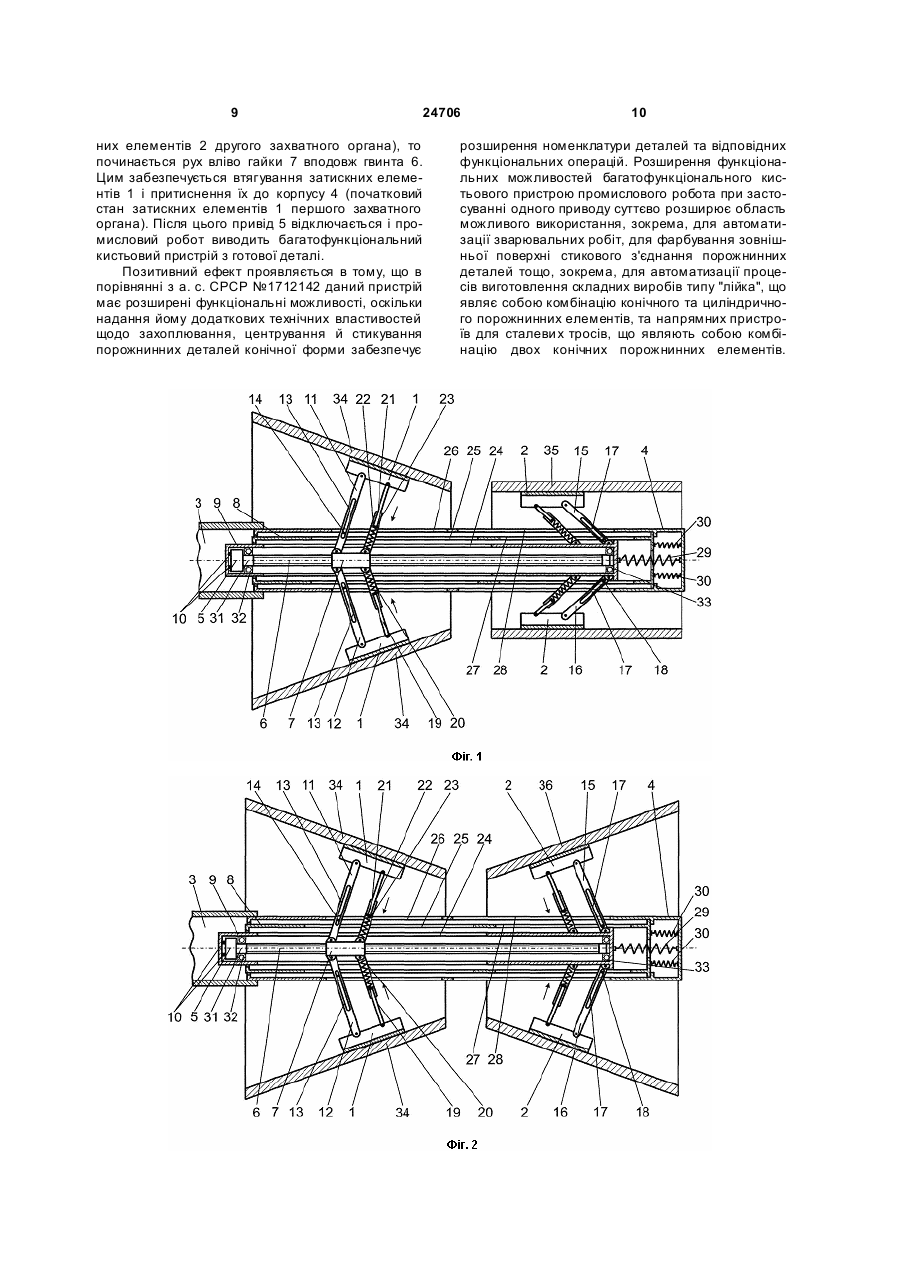
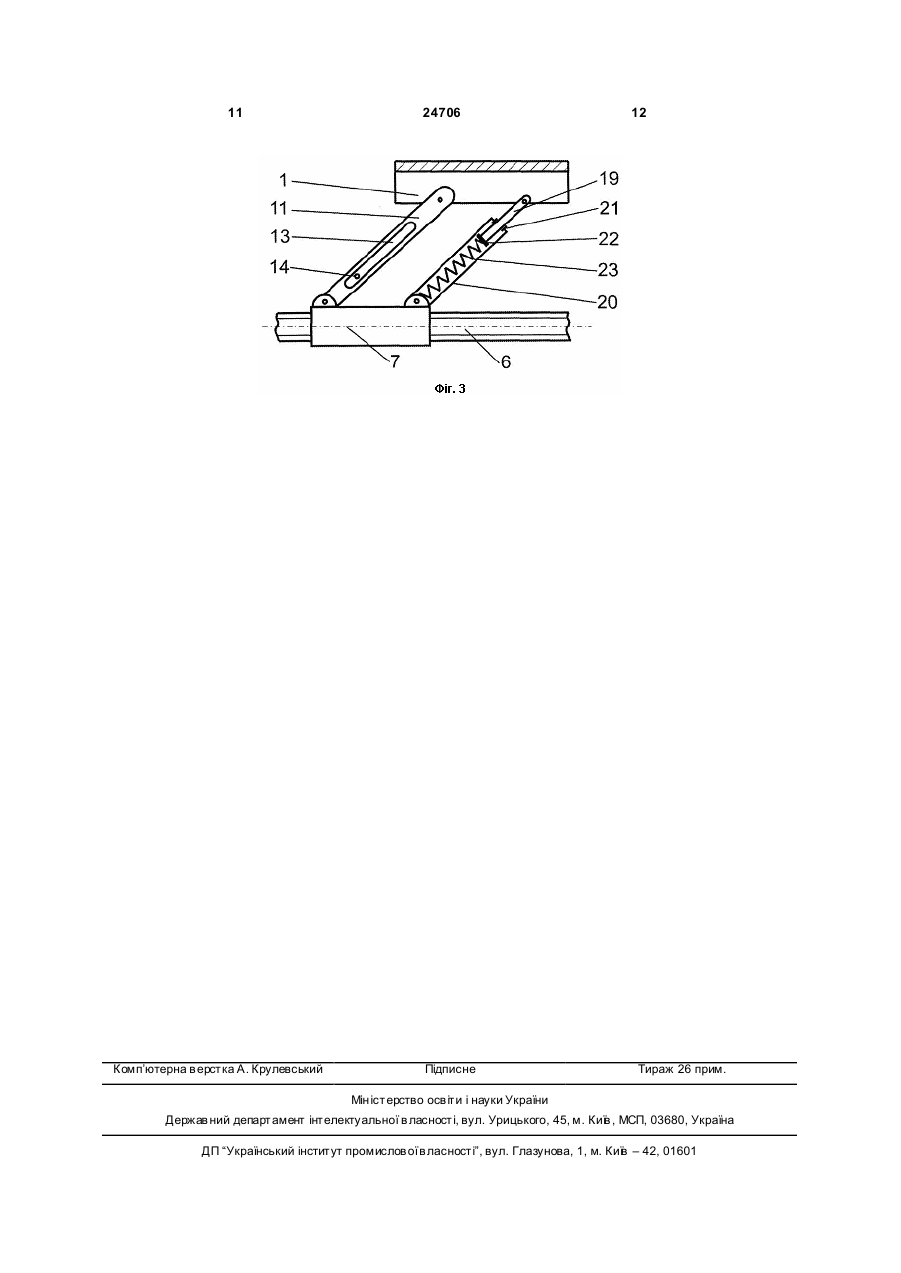
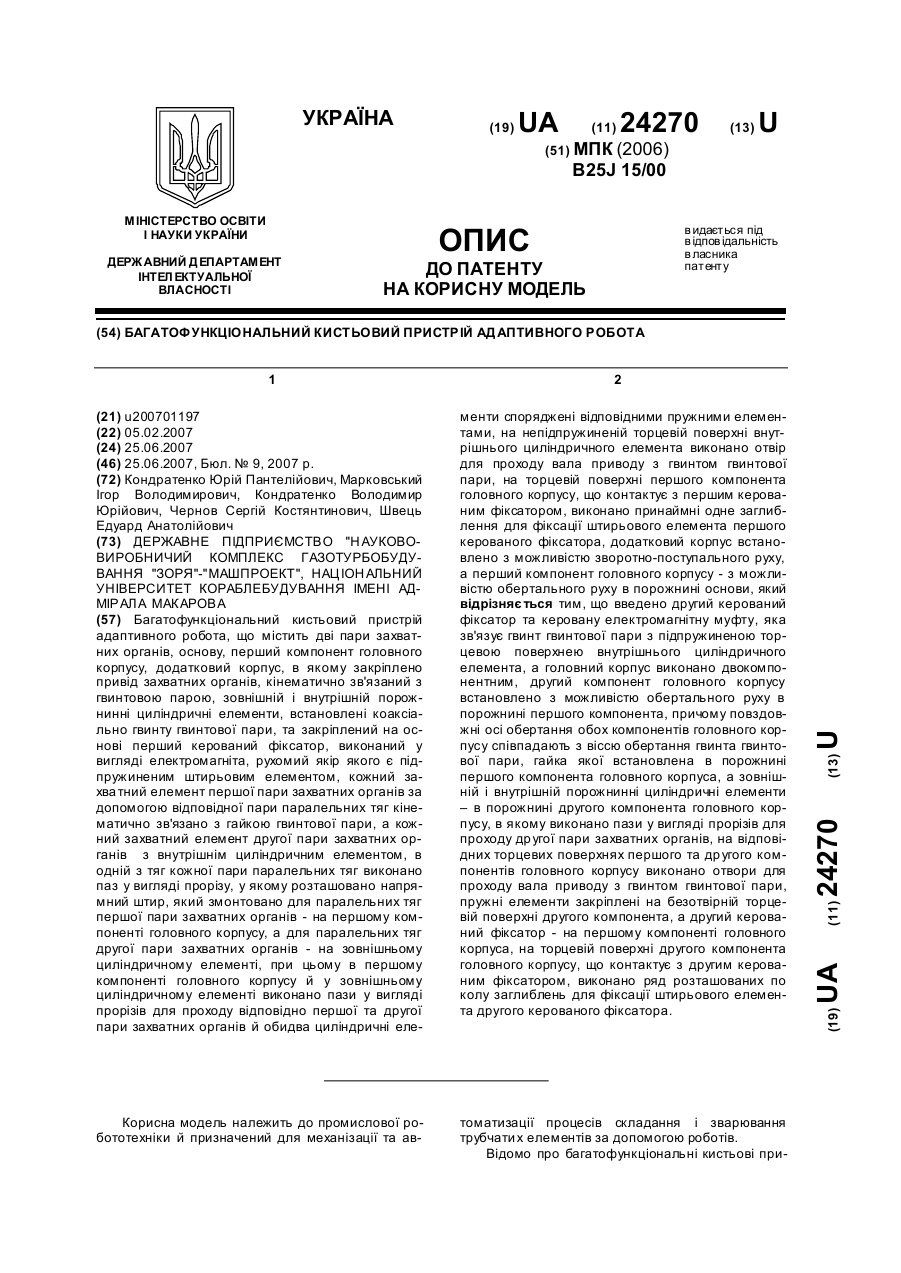
Багатофункціональний кистьовий пристрій промислового робота, що містить дві пари захватних органів, основу, корпус, привід захватних органів, кінематично з'єднаний з гвинтовою парою, та зовнішній і внутрішній порожнинні циліндричні елементи, встановлені коаксіально гвинту гвинтової пари, кожний затискний елемент першої пари захватних органів за допомогою відповідної пари шарнірно закріплених паралельних тяг кінематично зв'язано з гайкою гвинтової пари, а кожний затискний елемент другої пари захватних органів - з внутрішнім циліндричним елементом, в одній з тяг кожної пари паралельних тяг виконано паз у вигляді прорізу, у якому розташовано напрямний штир, який змонтовано для паралельних тяг першої пари захватних органів на корпусі, а для паралельних тяг др угої пари захватних органів - на зовнішньому циліндричному елементі, при цьому в корпусі й у циліндричних елементах виконано пази у вигляді прорізів для проходу захватни х органів й U 2 (11) 1 3 24706 пари, зовнішній та внутрішній порожнинні циліндричні елементи, що встановлені коаксиально валу гвинтової пари, дві пари захватних органів, один з яких механічно зв'язаний з гайкою гвинтової пари, а інший - з внутрішнім циліндричним елементом. Кожний з захватних органів містить принаймні пару губок з відповідними коромислами [а. с. СРСР №1572807, кл В.25 J 15/00, 1988]. Такий пристрій має проблеми, що пов'язані з відсутністю можливості захоплювання, центрування та стикування двох порожнинних, наприклад, трубчатих деталей (труба - труба, тр уба - фланець тощо) що особливо важливо при автоматизації складальних чи, наприклад, зварювальних операцій з використанням промислових роботів. Найбільш близьким аналогом є багатофункціональний кистьовий пристрій промислового робота [а. с. СРСР №1712142, кл. В25 J 15/00, 1992], що прийнятий як прототип. Такий багатофункціональний кистьовий пристрій промислового робота містить основу та корпус, привід захватни х органів, кінематично зв'язаний з гвинтовою парою, зовнішній і внутрішній порожні циліндричні елементи, встановлені коаксиально валу гвинтової пари, дві пари захватних органів, один з яких пов'язаний з гайкою гвинтової пари, а інший - з внутрішнім циліндричним елементом, кожна губка одного із захва тних органів кінематично зв'язана з гайкою гвинтової пари парою паралельних тяг, в одній з яких виконано паз, у якому розташовано додатковий штир, змонтований на головному корпусі, а кожний захватний елемент іншого захватного органу кінематично пов'язаний із внутрішнім порожнинним елементом парою паралельних тяг, в одній з яких виконано паз, у якому розташовано додатковий штир, змонтований на зовнішньому циліндричному елементі. При цьому в корпусі та в циліндричних елементах виконано пази для проходу паралельних тяг захватних органів і обидва циліндричні елементи підпружинено щодо корпусу. Такий багатофункціональний кистьовий пристрій промислового робота має проблеми, що пов'язані з відсутністю можливості захоплювання, центрування та стикування двох порожнинних деталей, хоча б одна з яких має конічну форму (тр уба - конусний трубчатий елемент, конусний трубчатий елемент фланець, два конусні трубчаті елементи тощо). Такий недолік суттєво обмежує область застосування багатофункціонального кистьового пристрою, зокрема, для автоматизації з використанням промислових роботів складальних чи, наприклад, зварювальних операцій з порожнинними деталями конічної форми, оскільки в процесі виконання відповідної технологічної операції промисловий робот має надійно утримувати порожнинні деталі конічної форми з необхідним стискальним зусиллям, що не може бути забезпечено пристроєм-прототипом згідно його конструктивних особливостей. В основу корисної моделі поставлено задачу удосконалення багатофункціонального кистьового пристрою промислового робота шляхом конструктивного надання захватним елементам можливості здійснення комбінованого плоско-паралельного та обертального руху для надійного контакту зати 4 скних елементів з внутрішньою поверхнею порожнинної деталі конічної форми, шляхом введення в конструкцію багатофункціонального кистьового пристрою промислового робота підпружинених тяг з адаптивним самонастроюванням їх довжини відповідно до характеристик порожнинної конічної поверхні деталей, що мають бути захоплені відповідною парою захватних органів, шляхом розміщення штока кожної підпружиненної тяги з можливістю його зворотно - поступального руху в порожнинному циліндричному стакані підпружиненої тяги та введення обмежувального фіксатора, що обмежує зворотно-поступальний рух штока відносно порожнинного циліндричного стакана, а також шляхом виконання правих тяг підпружиненими - для паралельних тяг першої пари захватних органів та шляхом виконання лівих тяг підпружиненими - для паралельних тяг др угої пари захватних органів, що призводить до розширення функціональних можливостей та області застосування багатофункціонального кистьового пристрою промислового робота. Поставлена задача вирішується тим, що в запропонованому багатофункціональному кистьовому пристрої робота, який містить дві пари захватних органів, основу, корпус, привід захватних органів, кінематично зв'язаний з гвинтовою парою, та зовнішній і внутрішній порожнинні циліндричні елементи, встановлені коаксиально гвинту гвинтової пари, кожний затискний елемент першої пари захватних органів за допомогою відповідної пари шарнірно закріплених паралельних тяг кінематично зв'язано з гайкою гвинтової пари, а кожний затискний елемент другої пари захватних органів - з внутрішнім циліндричним елементом, в одній з тяг кожної пари паралельних тяг виконано паз у вигляді прорізу, у якому розташовано напрямний штир, який змонтовано для паралельних тяг першої пари захватних органів - на корпусі, а для паралельних тяг другої пари захватних органів - на зовнішньому циліндричному елементі, при цьому в корпусі й у циліндричних елементах виконано пази у вигляді прорізів для проходу захватни х органів й обидва циліндричні елементи підпружинено щодо корпусу, згідно корисної моделі кожна не зв'язана з напрямним штирем тяга відповідної пари паралельних тяг виконана з можливістю регулювання її довжини у вигляді підпружиненого штока та циліндричного порожнинного стакана, одна торцева поверхня якого для паралельних тяг першої пари захватних органів з'єднана з відповідним шарніром гайки гвинтової пари, а для паралельних тяг другої пари захватних органів - з відповідним шарніром внутрішнього циліндричного елемента, при цьому в іншій торцевій поверхні циліндричного порожнинного стакана виконано отвір, через який шток тяги зв'язано з шарніром відповідного затискного елемента першої та другої пари захватних органів, на кінці кожного штока, розміщеному в порожнині відповідного циліндричного стакана, закріплено обмежувальний фіксатор, виконаний у вигляді пластини, площа якої перевищує величину площі отвору у відповідній торцевій поверхні циліндричного стакана, в порожнині кожного циліндричного стакана розміщено пружний елемент, за допомо 5 24706 гою якого обмежувальний фіксатор підпружинено відносно внутрішньої безотвірної торцевої поверхні порожнинного циліндричного стакана, кожний шток встановлено з можливістю зворотнопоступального руху в порожнині відповідного циліндричного стакана, крім того паз у вигляді прорізу для кожної пари паралельних тяг першої пари захва тних органів виконано у відповідних лівих тягах, а для кожної пари паралельних тяг др угої пари захватних органів - у відповідних правих тяга х. Винахідницький рівень забезпечується введеними конструктивними удосконаленнями, що надають можливість при використанні одного приводу захоплювати, центрувати та з'єднува ти комбіновані порожнинні деталі трубчатої та конічної форми. В результаті досягаються нові функціональні можливості, що пов'язані з розширенням номенклатури складних порожнинних деталей, з якими багатофункціональний кистьовий пристрій промислового робота може здійснювати відповідні технологічні операції. На Фіг.1 зображено фрагмент роботи багатофункціонального кистьового пристрою промислового робота, коли перша пара захватних органів захопила за внутрішню поверхню порожнинну деталь конічної форми, а друга пара захватних органів - порожнинну деталь циліндричної форми (трубчату деталь), при цьому здійснено центрування деталей; на Фіг.2 - фрагмент роботи багатофункціонального кистьового пристрою промислового робота, коли обидві пари захватних органів захопили за внутрішню поверхню порожнинні деталі конічної форми та здійснено центрування деталей; на Фіг.3 - пара паралельних тяг першої пари захва тних органів, в якій ліва тяга виконана з прорізом для взаємодії з напрямним штирем, а права тяга виконана підпружиненою з можливістю адаптивного самонастроювання її довжини відповідно до характеристик порожнинної конічної поверхні деталі. Багатофункціональний кистьовий пристрій робота містить дві пари захватних органів з відповідними затискними елементами 1 та 2, основу 3, корпус 4, привід 5 захватних органів, кінематично зв'язаний з гвинтовою парою „гвинт 6 - гайка 7", зовнішній 8 і внутрішній 9 порожнинні циліндричні елементи. У внутрішньому порожнинному циліндричному елементі 9 за допомогою амортизувальних кріплень 10 закріплено привід 5 захватних органів. Зовнішній 8 і внутрішній 9 порожнинні циліндричні елементи встановлені коаксиально гвинту 6 гвинтової пари. Кожний затискний елемент 1 першої пари захватних органів за допомогою пари паралельних тяг кінематично зв'язаний з гайкою 7 гвинтової пари. При цьому в лівих тягах 11, 12 кожної пари паралельних тяг виконано відповідні пази 13 у вигляді прорізу. В кожному пазу 13 першої пари захватних органів розташовано напрямний штир 14, який змонтовано відповідно на корпусі 4. Кожний затискний елемент 2 другої пари захватних органів також зв'язаний з внутрішнім циліндричним елементом 9 за допомогою відповідної пари паралельних тяг. При цьому в правих тягах 15, 16 кожної пари паралельних тяг виконано відповідні пази 17 у вигляді прорізу. В 6 кожному пазу 17 другої пари захватних органів розташовано напрямний штир 18, який змонтовано відповідно на зовнішньому 8 циліндричному елементі. Підпружинені праві тяги, що паралельно спарені з лівими тягами 11 й 12, та підпружинені ліві тяги, що паралельно спарені з правими тягами 15 й 16, виконані у вигляді підпружиненого штока 19 та циліндричного порожнинного стакана 20 з можливістю регулювання їх довжини. Одна торцева поверхня порожнинного стакана 20 для паралельних тяг першої пари захватних органів з'єднана з відповідним шарніром гайки 7 гвинтової пари, а для паралельних тяг др угої пари захватних органів - з відповідним шарніром внутрішнього циліндричного елемента 9. В іншій торцевій поверхні циліндричного порожнинного стакана 20 виконано отвір 21, через який шток 19 відповідної підпружиненої тяги зв'язано з шарніром затискного елемента першої або другої пари захватних органів. На кінці кожного штока 19, розміщеному в порожнині відповідного циліндричного стакана 20, закріплено обмежувальний фіксатор 22, виконаний у вигляді пластини, площа якої перевищує величину площі отвору 21 у відповідній торцевій поверхні циліндричного стакана 20. В порожнині кожного циліндричного стакана 20 розміщено пружний елемент 23, за допомогою якого обмежувальний фіксатор 22 підпружинено відносно внутрішньої безотвірної торцевої поверхні порожнинного циліндричного стакана 22. Кожний шток 19 встановлено з можливістю зворотно-поступального руху в порожнині відповідного циліндричного стакана 20. Для проходу спарених з тягами 11, 12 паралельних тяг першої пари захватних органів виконано пази 24, 25 та 26 у вигляді прорізів відповідно у внутрішньому 9 і зовнішньому 8 циліндричних елементах та в корпусі 4. Для проходу спарених з тягами 15, 16 паралельних тяг другої пари захватних органів виконано пази 27 та 28 у вигляді прорізів, відповідно, у зовнішньому 8 циліндричному елементі та в корпусі 4. Одна з торцевих поверхонь внутрішнього 9 циліндричного елемента зв'язана з корпусом 4 за допомогою пружини 29, а одна з торцевих поверхонь зовнішнього 8 циліндричного елемента - за допомогою пружин 30. На непідпружиненій торцевій поверхні внутрішнього 9 циліндричного елемента виконано отвір, через який вал 31 привода 5 зв'язано з гвинтом 6 гвинтової пари. Гвинтова пара „гвинт 6 - гайка 7" закріплена в порожнині внутрішнього 9 порожнинного елемента за допомогою відповідних підшипників 32 та 33. Запропонований пристрій працює таким чином. У початковому положенні привід 5 захватних органів відключено, дві пари затискних губок 1 й 2 притиснуті до корпуса 4, циліндричні елементи 8 й 9 втягнені в корпус 4, а гайка 7 розташована в крайньому лівому положенні. Обмежуючі фіксатори 22 знаходяться в початковому стані (як показано на Фіг.3), коли штоки 19 підпружинених тяг під дією пружних елементів 23 утримуються в крайньому верхньому положенні, тобто є максимально висун утими з відповідних порожнинних циліндричних стаканів 20. Промисловий робот переміщує 7 24706 багатофункціональний кистьовий пристрій таким чином, щоб затискні елементи 1 першого захватного органа розташовувалися в порожнині конічної деталі 34, призначеної для захоплювання. При включенні приводу 5 гвинт 6 обертається проти годинникової стрілки, а гайка 7 зміщується вправо по гвинту 6. Шарнірно закріплені на гайці 7 тяги 11,12 разом з паралельно спареними підпружиненими тягами повертаються щодо відповідних напрямних штирів 14 й одночасно висуваються з пазів 24, 25, 26. Необхідне переміщення тяг 11, 12 забезпечується взаємодією відповідних пазів 13 і напрямних штирів 14, забезпечуючи висування кожного затискного елемента 1 першого захватного органа. Висування затискних елементів 1 при здійсненні плоско-паралельного руху буде відбуватися до тих пір, поки вони не торкнуться стінок порожнинної деталі 34. В подальшому затискні елементи 1 будуть здійснювати складний рух, що є комбінацією плоско-паралельного руху та обертального (поворотного за годинниковою стрілкою) руху, при якому штоки 19 будуть входити в порожнини відповідних циліндричних стаканів 20 підпружинених тяг. Адаптивне самонастроювання довжини підпружинених тяг буде здійснюватись відповідно до характеристик порожнинної конічної поверхні деталі 34, тобто до повного прилягання затискних елементів 1 до внутрішньої поверхні конічної деталі 34 (як показано на Фіг.1). При цьому гайка 7 зупиниться й буде фіксованою в даному положенні. Забезпечивши створення першим захва тним органом необхідного стискального зусилля, система керування промислового робота (не показана) відключає привід 5. Після цього робот переміщує багато функціональний кистьовий пристрій промислового робота з деталлю 34 таким чином, щоб затискні елементи 2 другого захватного органа перебували в порожнині іншої деталі 35 (Фіг.1) або 36 (Фіг.2). При цьому надається живлення приводу 5, що забезпечує обертання гвинта 6 проти годинникової стрілки. Оскільки гайка 7 фіксована в даному положенні, то привід 5 разом з внутрішнім циліндричним елементом 9 і кінематично зв'язаним з валом привода 5 гвинтом 6 починає переміщуватися вліво щодо гайки 7. Внутрішній циліндричний елемент 9 буде висуватися, тобто переміщатися вліво щодо корпуса 4, розтягуючи пружину 29. Тяги 15, 16 разом з паралельно спареними підпружиненими тягами, що шарнірно зв'язані із внутрішнім циліндричним елементом 9, також почнуть повертатися й одночасно висуватися з пазів 27, 28 відносно відповідних напрямних штирів 18. Переміщення тяг 15, 16 здійснюється взаємодією відповідних пазів 17 і напрямних штирів 18, забезпечуючи плоско-паралельний рух (висування) кожного затискного елемента 2 другого захватного органа. У випадку, якщо друга деталь є циліндричною порожнинною деталлю 35 (Фіг.1), висування кожного затискного елемента 2 буде відбуватися доти, поки вони не торкнуться стінок порожнинної деталі 35 (як показано на Фіг.1). У випадку, якщо друга деталь є порожнинною деталлю 36 конічної форми (Фіг.1), висування затискних елементів 2 при здійсненні плоскопаралельного руху буде відбуватися до тих пір, 8 поки вони не торкнуться стінок порожнинної деталі 36. В подальшому затискні елементи 2 будуть здійснювати складний рух, що є комбінацією плоско-паралельного руху та обертального (поворотного проти годинникової стрілки) руху, при якому штоки 19 будуть входити в порожнини відповідних циліндричних стаканів 20 підпружинених тяг. Адаптивне самонастроювання довжини підпружинених тяг буде здійснюватись відповідно до характеристик порожнинної конічної поверхні деталі 36, тобто до повного прилягання затискних елементів 2 до внутрішньої поверхні конічної деталі 36 (як показано на Фіг.2). При цьому одночасно з процесом захоплювання порожнинної деталі 35 (або 36) відбувається її центрування відносно подовжньої осі пристрою, що призводить до співпадання на кінцевому стані подовжніх осей порожнинних деталей 34, 35 (Фіг.1) або деталей 34, 36 (Фіг.2). Забезпечивши створення другим захватним органом необхідного стискального зусилля, система керування робота відключає привід 5. Після цього промисловий робот переміщує багатофункціональний кистьовий пристрій робота з деталями 34 й 35 (або 34 й 36) у зону виконання відповідної технологічної операції (складальні операції, зварювання тощо). При наданні живлення приводу 5 гвинт 6 буде переміщатися в гайці 7, разом з внутрішнім циліндричним елементом 9 починає висуватися вліво з корпуса 4 зовнішній циліндричний елемент 8, розтягуючи пружини 30. Рух зовнішнього циліндричного елемента 8 забезпечується взаємодією пазів 17 та напрямних штирів 18. Таким чином, вліво будуть переміщатися зовнішній циліндричний елемент 8, внутрішній циліндричний елемент 9, привід 5, гвинт 6, тяги 15, 16 і спарені з ними підпружинені тяги, затискні елементи 2, а також порожнинна деталь 35 (Фіг.1) або 36 (Фіг.2), як одна жорстка система. Переміщення деталі 35 (або 36) буде відбуватися до тих пір, поки вона не зістикується з деталлю 34 при утворенні стикового з'єднання двох де талей 34, 35 або 34 й 36. Привід 5 при цьому відключається від джерела живлення. Оскільки всі спарені тяги, а також затискні елементи 1, 2 є симетричними, то забезпечується надійне центрування й стикування порожнинних деталей 34, 35 або 34 й 36. Багатофункціональний кистьовий пристрій промислового робота може працювати у будь-якому вихідному положенні: вертикальному, горизонтальному, з нахилом. Після виконання технологічної операції для стикового з'єднання порожнинних деталей 34, 35 або 34 й 36 промисловий робот переміщує багатофункціональний кистьовий пристрій до накопичувача (не показаний) готових деталей. Привід 5 включається на обертання за годинниковою стрілкою (реверс). При цьому гвинт 6 разом з зовнішнім 8 і внутрішнім 9 циліндричними елементами буде переміщува тися вправо відносно гайки 7. Затискні елементи 2 будуть втягуватися, штоки 19 підпружинених тяг висува тися з відповідних порожнин циліндричних стаканів 20, а пружини 29, 30 - стискатися. Коли зовнішній 8 і внутрішній 9 циліндричні елементи будуть повністю втягнені в корпус 4, затискні елементи 2 другого захватного органа будуть щільно притиснуті до корпусу 4 (початковий стан затиск 9 24706 них елементів 2 другого захватного органа), то починається рух вліво гайки 7 вподовж гвинта 6. Цим забезпечується втягування затискних елементів 1 і притиснення їх до корпусу 4 (початковий стан затискних елементів 1 першого захватного органа). Після цього привід 5 відключається і промисловий робот виводить багатофункціональний кистьовий пристрій з готової деталі. Позитивний ефект проявляється в тому, що в порівнянні з а. с. СРСР №1712142 даний пристрій має розширені функціональні можливості, оскільки надання йому додаткових технічних властивостей щодо захоплювання, центрування й стикування порожнинних деталей конічної форми забезпечує 10 розширення номенклатури деталей та відповідних функціональних операцій. Розширення функціональних можливостей багатофункціонального кистьового пристрою промислового робота при застосуванні одного приводу суттєво розширює область можливого використання, зокрема, для автоматизації зварювальних робіт, для фарбування зовнішньої поверхні стикового з'єднання порожнинних деталей тощо, зокрема, для автоматизації процесів виготовлення складних виробів типу "лійка", що являє собою комбінацію конічного та циліндричного порожнинних елементів, та напрямних пристроїв для сталеви х тросів, що являють собою комбінацію двох конічних порожнинних елементів. 11 Комп’ютерна в ерстка А. Крулевський 24706 Підписне 12 Тираж 26 прим. Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститут промислов ої в ласності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMultifunctional hand device of industrial robot
Автори англійськоюKondratenko Yurii Panteliiovych, Markovskyi Ihor Volodymyrovych, Kondratenko Volodymyr Yuriiovych, Chernov Serhii Kostiantynovych, Shyshkin Oleksandr Serhiiovych
Назва патенту російськоюМногофункциональное кистевое устройство промышленного робота
Автори російськоюКондратенко Юрий Пантелеевич, Марковский Игорь Владимирович, Кондратенко Владимир Юрьевич, Чернов Сергей Константинович, Шишкин Александр Сергеевич
МПК / Мітки
МПК: B25J 15/00
Мітки: багатофункціональний, вузол, кистьовий, промислового, робота
Код посилання
<a href="https://ua.patents.su/6-24706-bagatofunkcionalnijj-kistovijj-vuzol-promislovogo-robota.html" target="_blank" rel="follow" title="База патентів України">Багатофункціональний кистьовий вузол промислового робота</a>
Багатофункціональний кистьовий пристрій робота

Номер патенту: 18647
Опубліковано: 15.11.2006
Автори: Чернов Сергій Костянтинович, Марковський Ігор Володимирович, Кондратенко Володимир Юрійович, Кондратенко Юрій Пантелійович, Швець Едуард Анатолійович
МПК: B25J 15/00
Мітки: пристрій, багатофункціональний, робота, кистьовий
Формула / Реферат:
Багатофункціональний кистьовий пристрій робота, що містить дві пари захватних органів, основу, головний корпус, привід захватних органів, кінематично зв'язаний з гвинтовою парою, та зовнішній і внутрішній порожнинні циліндричні елементи, встановлені коаксіально гвинту гвинтової пари, кожний захватний елемент першої пари захватних органів за допомогою відповідної пари паралельних тяг кінематично зв'язано з гайкою гвинтової пари, а кожний...
Багатофункціональний кистьовий пристрій адаптивного робота
Номер патенту: 24270
Опубліковано: 25.06.2007
Автори: Кондратенко Володимир Юрійович, Швець Едуард Анатолійович, Марковський Ігор Володимирович, Чернов Сергій Костянтинович, Кондратенко Юрій Пантелійович
МПК: B25J 15/00
Мітки: адаптивного, багатофункціональний, кистьовий, пристрій, робота
Формула / Реферат:
Багатофункціональний кистьовий пристрій адаптивного робота, що містить дві пари захватних органів, основу, перший компонент головного корпусу, додатковий корпус, в якому закріплено привід захватних органів, кінематично зв'язаний з гвинтовою парою, зовнішній і внутрішній порожнинні циліндричні елементи, встановлені коаксіально гвинту гвинтової пари, та закріплений на основі перший керований фіксатор, виконаний у вигляді електромагніта, рухомий...
Двозахоплювальний пристрій промислового робота

Номер патенту: 18300
Опубліковано: 15.11.2006
Автори: Павленко Іван Іванович, Мажара Віталій Анатолійович
МПК: B65H 09/00
Мітки: двозахоплювальний, промислового, пристрій, робота
Формула / Реферат:
Двозахоплювальний пристрій промислового робота для одночасного затискання двох деталей, що складається з корпусу, в якому розміщені шток-рейка, з поршнем всередині, та рейкове колесо, пневмоциліндра, важеля, фланця та захоплювачів, який відрізняється тим, що його устатковано рейковим механізмом, а один із захоплювачів виконано підпружиненим.
Двозахватний пристрій промислового робота

Номер патенту: 18720
Опубліковано: 15.11.2006
Автори: Мажара Віталій Анатолійович, Павленко Іван Іванович, Годунко Максим Олегович
МПК: B25J 18/00, B23Q 3/06
Мітки: робота, промислового, двозахватний, пристрій
Формула / Реферат:
1. Двозахватний пристрій промислового робота для одночасного затиску двох деталей, який складається з механізму зміни захватів місцями, фланця, кисті та захватів, який відрізняється тим, що його устатковано гальмівним механізмом, а вісь захвату виконано паралельно осі руки робота.2. Двозахватний пристрій промислового робота за п. 1, який відрізняється тим, що як гальмівний механізм використано гідравлічні демпфери.
Двозахватний пристрій промислового робота

Номер патенту: 15774
Опубліковано: 17.07.2006
Автори: Павленко Іван Іванович, Мажара Віталій Анатолійович
МПК: F16S 5/00
Мітки: двозахватний, пристрій, промислового, робота
Формула / Реферат:
1. Двозахватний пристрій промислового робота для одночасного затиску двох деталей, що складається з важелів з губками, вилки та тяги, які приєднані до кронштейна, обертового пневмоциліндра та пневмоциліндра розтиску, який відрізняється тим, що пневмоциліндр розтиску винесений за межі захватного пристрою.2. Двозахватний пристрій промислового робота за п. 1, який відрізняється тим, що розтиск захвату можливий лише в робочій...
Попередній патент: Установка для приготування бетонних сумішей та розчинів
Наступний патент: Розчин для нанесення оксидного покриття на металеву поверхню
Випадковий патент: Коробчата теплоізоляційна цегла