Спосіб ідентифікації стискального зусилля адаптивного робота
Номер патенту: 47235
Опубліковано: 25.01.2010
Автори: Кондратенко Володимир Юрійович, Кондратенко Юрій Пантелійович
Формула / Реферат
Спосіб ідентифікації стискального зусилля адаптивного робота, згідно з яким переміщують захватний орган з принаймні двома затискними губками таким чином, щоб об'єкт маніпулювання знаходився між затискними губками захватного органа в центрованому відносно губок положенні, після чого здійснюють стискання губок у напрямку скорочення відстані між ними і реєструють інформацію про одночасне контактування обох затискних губок з об'єктом маніпулювання, після створення попередньо заданої величини мінімального стискального зусилля призупиняють процес стискання губок, а потім почергово здійснюють вертикальний спробний рух захватного органа за допомогою маніпуляційної системи адаптивного робота, що забезпечує підйом захватного органа у вертикальному напрямку на попередньо визначену постійну величину з одночасним припиненням процесу стискання губок і з постійною реєстрацією інформації про проковзування об'єкта маніпулювання між губками захватного органа, та стискання губок для нарощування стискального зусилля на відповідну попередньо визначену постійну величину з одночасним припиненням процесу вертикального підйому захватного органа, при здійсненні роботом серії спробних рухів, кількість яких залежить від маси об'єкта маніпулювання, з перемежуванням з серією покрокового нарощування стискального зусилля постійно забезпечують реєстрацію кількості здійснених роботом спробних рухів, запам'ятовування в пам'яті робота і отримання при необхідності з пам'яті робота фіксованої величини стискального зусилля, а також забезпечують можливість послідовного здійснення операцій розведення губок, опускання захватного органа у вертикальному напряму та стискання губок, у випадку відсутності інформації про проковзування об'єкта маніпулювання при виконанні чергового спробного руху захватного органа після відповідного кроку нарощування стискального зусилля призупиняють процес почергового виконання спробних рухів і нарощування стискального зусилля, фіксують з відповідним масштабним коефіцієнтом ідентифіковане роботом значення величини стискального зусилля, що відповідає масі об'єкта маніпулювання, а в подальшому перед реалізацією запланованої траєкторії переміщення об'єкта маніпулювання здійснюють процес кінцевого стискання губок зі створенням бажаної фіксованої величини стискального зусилля, що відповідає попередньо ідентифікованому згідно з масою об'єкта маніпулювання та масштабованому значенню, який відрізняється тим, що всю серію спробних рухів робота розбивають на окремі послідовні етапи, на кожному з яких максимальну кількість спробних рухів встановлюють у відповідності з вертикальним розміром допустимої контактної зони для губок захватного органа на об'єкті маніпулювання і визначають як округлений до меншого значення результат від ділення розміру допустимої контактної зони на величину вертикального підйому захватного органа при здійсненні одного спробного руху, в процесі реалізації адаптивним роботом серії спробних рухів постійно порівнюють поточну кількість здійснених на черговому етапі спробних рухів з максимально можливою на будь-якому етапі кількістю спробних рухів, при досягненні якої запам'ятовують і зберігають в пам'яті адаптивного робота кінцеве для завершеного чергового етапу значення стискального зусилля, після чого розводять затискні губки в напрямку збільшення відстані між ними до зникнення контакту між об'єктом маніпулювання і затискними губками захватного органа, який потім за допомогою маніпуляційної системи адаптивного робота опускають у вертикальному напрямі на відстань, що дорівнює добутку кількості здійснених на черговому етапі спробних рухів на величину вертикального переміщення захватного органа при реалізації одного спробного руху, а в подальшому перед реалізацією наступного етапу серії спробних рухів здійснюють процес стискання губок зі створенням фіксованої величини стискального зусилля, що відповідає визначеному на попередньому етапі значенню, яке отримують з пам’яті адаптивного робота.
Текст
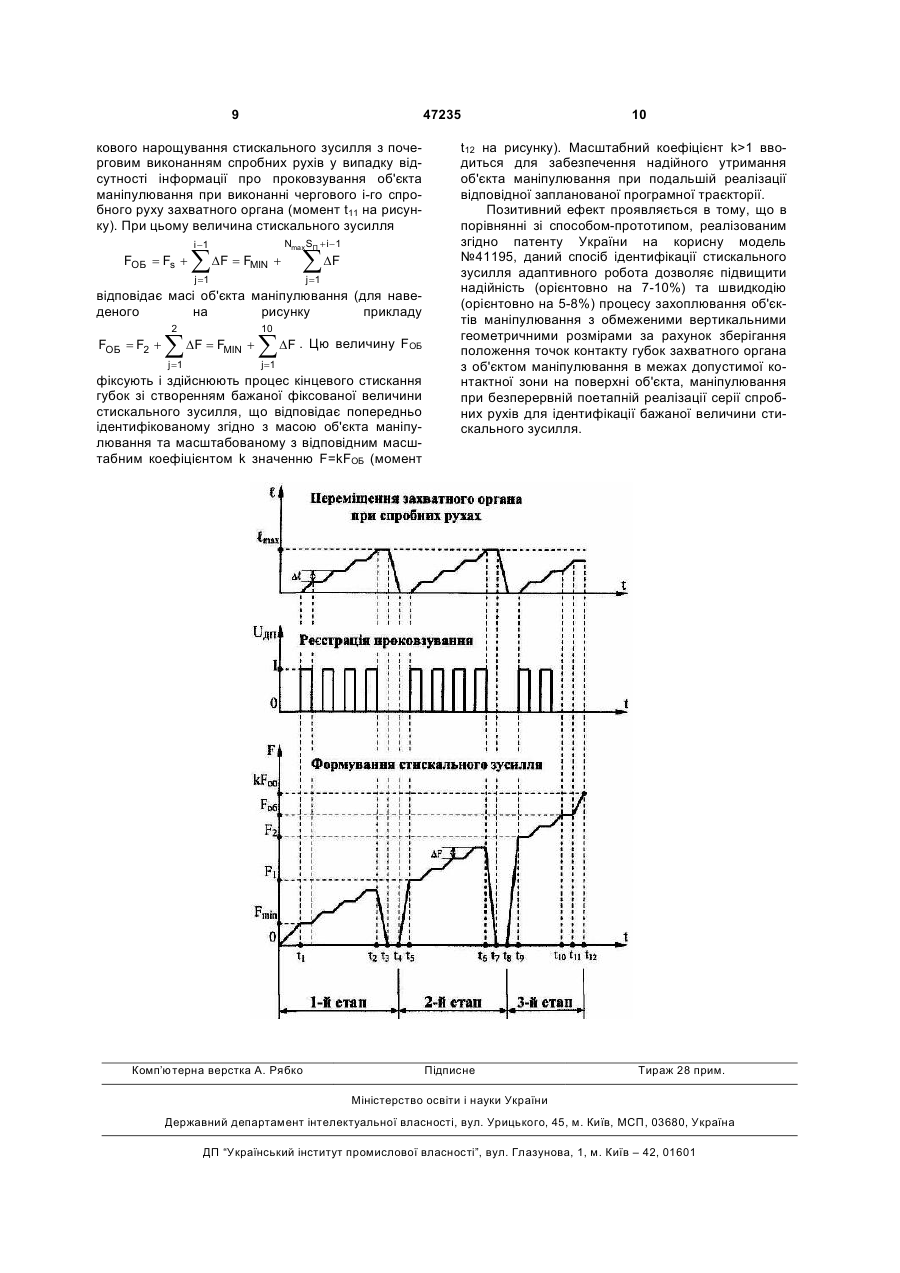
Спосіб ідентифікації стискального зусилля адаптивного робота, згідно з яким переміщують захватний орган з принаймні двома затискними губками таким чином, щоб об'єкт маніпулювання знаходився між затискними губками захватного органа в центрованому відносно губок положенні, після чого здійснюють стискання губок у напрямку скорочення відстані між ними і реєструють інформацію про одночасне контактування обох затискних губок з об'єктом маніпулювання, після створення попередньо заданої величини мінімального стискального зусилля призупиняють процес стискання губок, а потім почергово здійснюють вертикальний спробний рух захватного органа за допомогою маніпуляційної системи адаптивного робота, що забезпечує підйом захватного органа у вертикальному напрямку на попередньо визначену постійну величину з одночасним припиненням процесу стискання губок і з постійною реєстрацією інформації про проковзування об'єкта маніпулювання між губками захватного органа, та стискання губок для нарощування стискального зусилля на відповідну попередньо визначену постійну величину з одночасним припиненням процесу вертикального підйому захватного органа, при здійсненні роботом серії спробних рухів, кількість яких залежить від маси об'єкта маніпулювання, з перемежуванням з серією покрокового нарощування стискального зусилля постійно забезпечують реєстрацію кількості здійснених роботом спробних рухів, запам'ятовування в пам'яті робота і отримання при необхідності з пам'яті робота фіксованої величини стискального зусилля, а також забезпечують можливість послідовного здійснення операцій розведення губок, опускання захватного органа у вертикальному напряму та стискання губок, у випадку відсутності інформації про проковзування об'єкта маніпулювання при виконанні чергового спробного 2 (19) 1 3 Корисна модель належить до робототехніки й може бути використана в конструкціях та системах управління адаптивних роботів з чутливими захватними органами, що адаптуються до маси об'єктів маніпулювання, які захоплюють. Відомо про способи ідентифікації стискального зусилля адаптивних роботів, які на основі реєстрації інформації про контактування губок захватного органу з об'єктом маніпулювання та реєстрації інформації про проковзування об'єкта маніпулювання між затискними губками захватного органа забезпечують в процесі автоматичного захоплювання об'єкта маніпулювання одночасний контакт затискних губок з об'єктом маніпулювання та формування величини стискального зусилля губок відповідно до маси об'єкта маніпулювання. При цьому реєструють сигнали проковзування, які формують при появі або зникненні проковзування об'єктів маніпулювання між затискними губками захватних органів адаптивних роботів. Прикладом такого способу є спосіб ідентифікації стискального зусилля відповідно до маси об'єкта маніпулювання, реалізований в пристрої для керування адаптивним роботом [Авт.свід. СРСР №1188700, МКІ G05В19/00, опубл. Бюл. №40, 1985], згідно з яким переміщують захватний орган з двома затискними губками в область робочої зони адаптивного робота, де знаходиться об'єкт маніпулювання, і орієнтують губки захватного органа таким чином, щоб між ними знаходився об'єкт маніпулювання, після чого здійснюють стискання губок захватного органу в напрямку скорочення відстані між ними з контролюванням моментів контактування губок з об'єктом маніпулювання. В подальшому після реєстрації інформації про одночасне контактування об'єкта маніпулювання з обома губками здійснюють процес підйому захватного органа, а після реєстрації інформації про початок руху об'єкта маніпулювання у вертикальному напрямку припиняють процес стискання губок і фіксують в даний момент величину стискального зусилля, що відповідає масі об'єкта маніпулювання. Такий спосіб має наступні проблеми: - спосіб передбачає припинення процесу стискання губок тільки після реєстрації інформації про початок руху об'єкта маніпулювання у вертикальному напрямку під час здійснення вертикального підйому захватного органа після реєстрації інформації про одночасне контактування об'єкта маніпулювання з обома губками, що може призводити до розташування кінцевих точок контакту затиснутих губок за межами допустимої контактної зони на об'єкті маніпулювання; - низька надійність пристроїв, що реалізують даний спосіб, оскільки вихід кінцевих точок контакту затиснутих губок за межі допустимої контактної зони може ускладнити процес реалізації роботом траєкторій переміщення об'єкта маніпулювання на високих швидкостях. Найбільш близьким до запропонованого є спосіб адаптації робота до маси об'єктів маніпулювання [Патент України на корисну модель №41195, МПК B25J19/02, G05B19/00, опубл. Бюл. 47235 4 №9, 2009], що прийнятий як прототип. Згідно даного способу адаптації робота до маси об'єктів маніпулювання захватний орган з, принаймні, двома затискними губками переміщують таким чином, щоб об'єкт маніпулювання знаходився між затискними губками захватного органа в центрованому відносно губок положенні, після чого здійснюють стискання губок у напрямку скорочення відстані між ними і реєструють інформацію про одночасне контактування обох затискних губок з об'єктом маніпулювання. Потім почергово здійснюють: а) вертикальний спробний рух захватного органа за допомогою маніпуляційної системи робота, що забезпечує підйом захватного органа у вертикальному напрямку на попередньо визначену постійну величину, з одночасним припиненням процесу стискання губок і з постійною реєстрацією інформації про проковзування об'єкта маніпулювання між губками захватного органа; б) стискання губок для нарощування стискального зусилля на відповідну попередньо визначену постійну величину, з одночасним припиненням процесу вертикального підйому захватного органа. У випадку відсутності інформації про проковзування об'єкта маніпулювання при виконанні чергового спробного руху захватного органу після відповідного попереднього кроку нарощування стискального зусилля призупиняють процес почергового виконання спробних рухів і нарощування стискального зусилля і фіксують з відповідним масштабним коефіцієнтом ідентифіковане адаптивним роботом значення величини стискального зусилля, що відповідає масі об'єкта маніпулювання. При цьому запам'ятовують і зберігають в пам'яті адаптивного робота ідентифіковану величину масштабованого стискального зусилля та реєструють кількість спробних рухів, здійснених роботом для ідентифікації бажаного значення стискального зусилля, що відповідає масі об'єкта маніпулювання, після чого розводять затискні губки в напрямку збільшення відстані між ними до зникнення контакту між об'єктом маніпулювання і затискними губками захватного органа, який потім за допомогою маніпуляційної системи робота опускають у вертикальному напрямі на відстань, що дорівнює добутку кількості здійснених для ідентифікації бажаного стискального зусилля спробних рухів на величину вертикального переміщення захватного органу при реалізації одного спробного руху. В подальшому перед реалізацією роботом запланованої траєкторії переміщення об'єкта маніпулювання здійснюють процес кінцевого стискання губок зі створенням бажаної фіксованої величини стискального зусилля, що відповідає попередньо ідентифікованому згідно з масою об'єкта маніпулювання та масштабованому значенню, яке отримують з пам'яті інтелектуального робота. Такий спосіб має наступні проблеми: - спосіб передбачає обов'язкове повернення захватного органа в початкове (перед початком стискання губок) положення при здійсненні будьякої кількості спробних рухів (навіть двох) почергово з покроковим нарощуванням стискального зусилля для ідентифікації його бажаної величини, 5 що відповідає апріорно невідомій масі об'єкта маніпулювання. Разом з тим, для широкого класу об'єктів маніпулювання достатньо з точки зору надійної реалізації адаптивним роботом запланованої траєкторії, щоб губки захватного органа в момент кінцевого створення бажаної величини стискального зусилля залишались в межах допустимої контактної зони на поверхні об'єкта маніпулювання. В таких випадках буде мати місце недоцільне зниження швидкодії процесу захоплювання адаптивним роботом об'єкта маніпулювання та зниження швидкодії всього автоматизованого технологічного процесу в цілому; - низька надійність реалізації даного способу у випадках, якщо робот має захоплювати об'єкт з обмеженими вертикальними розмірами. Це пов'язано з тим, що в багатьох випадках об'єкт маніпулювання може вислизати з губок захватного органа, оскільки для ідентифікації бажаного значення стискального зусилля роботу при здійсненні серії спробних рухів необхідно здійснити вертикальний зсув губок захватного органа, який може перевищувати вертикальний розмір контактної робочої зони об'єкта маніпулювання. В основу корисної моделі поставлено задачу удосконалення способу ідентифікації стискального зусилля адаптивних роботів до маси об'єктів маніпулювання шляхом розділення серії вертикальних спробних рухів на окремі етапи, які здійснюють послідовно один за одним, визначення кількості спробних рухів на кожному з етапів у відповідності з вертикальним розміром допустимої контактної зони об'єкта маніпулювання, при розташуванні губок захватного органа в межах якої забезпечується надійна реалізація адаптивним роботом запланованої траєкторії, а також шляхом обов'язкового повернення захватного органа в початкове (перед початком стискання губок) положення при завершенні будь-якого етапу спробних рухів з реалізацією процесу безперервного покрокового нарощування стискального зусилля для ідентифікації його бажаної величини, що дозволить адаптивному роботу для широкого класу об'єктів маніпулювання з обмеженими вертикальними геометричними розмірами суттєво підвищити надійність та швидкодію процесів їх захоплювання. Поставлена задача вирішується тим, що при реалізації способу ідентифікації стискального зусилля адаптивного робота, згідно з яким переміщують захватний орган з, принаймні, двома затискними губками таким чином, щоб об'єкт маніпулювання знаходився між затискними губками захватного органа в центрованому відносно губок положенні, після чого здійснюють стискання губок у напрямку скорочення відстані між ними і реєструють інформацію про одночасне контактування обох затискних губок з об'єктом маніпулювання, після створення попередньо заданої величини мінімального стискального зусилля призупиняють процес стискання губок, а потім почергово здійснюють вертикальний спробний рух захватного органу за допомогою маніпуляційної системи адаптивного робота, що забезпечує підйом захватного органа у вертикальному напрямку на попередньо визначену постійну величину з од 47235 6 ночасним припиненням процесу стискання губок і з постійною реєстрацією інформації про проковзування об'єкта маніпулювання між губками захватного органа, та стискання губок для нарощування стискального зусилля на відповідну попередньо визначену постійну величину з одночасним припиненням процесу вертикального підйому захватного органа, при здійсненні роботом серії спробних рухів, кількість яких залежить від маси об'єкта маніпулювання, з перемежуванням з серією покрокового нарощування стискального зусилля постійно забезпечують реєстрацію кількості здійснених роботом спробних рухів, запам'ятовування в пам'яті робота і отримання при необхідності з пам'яті робота фіксованої величини стискального зусилля, а також забезпечують можливість послідовного здійснення операцій розведення губок, опускання захватного органа у вертикальному напряму та стискання губок, у випадку відсутності інформації про проковзування об'єкта маніпулювання при виконанні чергового спробного руху захватного органу після відповідного кроку нарощування стискального зусилля призупиняють процес почергового виконання спробних рухів і нарощування стискального зусилля, фіксують з відповідним масштабним коефіцієнтом ідентифіковане роботом значення величини стискального зусилля, що відповідає масі об'єкта маніпулювання, а в подальшому перед реалізацією запланованої траєкторії переміщення об'єкта маніпулювання здійснюють процес кінцевого стискання губок зі створенням бажаної фіксованої величини стискального зусилля, що відповідає попередньо ідентифікованому згідно з масою об'єкта маніпулювання та масштабованому значенню, згідно пропозиції всю серію спробних рухів робота розбивають на окремі послідовні етапи, на кожному з яких максимальну кількість спробних рухів встановлюють у відповідності з вертикальним розміром допустимої контактної зони для губок захватного органа на об'єкті маніпулювання і визначають як округлений до меншого значення результат від ділення розміру допустимої контактної зони на величину вертикального підйому захватного органа при здійсненні одного спробного руху, в процесі реалізації адаптивним роботом серії спробних рухів постійно порівнюють поточну кількість здійснених на черговому етапі спробних рухів з максимально можливою на будь-якому етапі кількістю спробних рухів, при досягненні якої запам'ятовують і зберігають в пам'яті адаптивного робота кінцеве для завершеного чергового етапу значення стискального зусилля, після чого розводять затискні губки в напрямку збільшення відстані між ними до зникнення контакту між об'єктом маніпулювання і затискними губками захватного органа, який потім за допомогою маніпуляційної системи адаптивного роботаопускають у вертикальному напрямі на відстань, що дорівнює добутку кількості здійснених на черговому етапі спробних рухів на величину вертикального переміщення захватного органу при реалізації одного спробного руху, а в подальшому перед реалізацією наступного етапу серії спробних рухів здійснюють процес стискання губок зі створенням фіксованої величини стиска 7 льного зусилля, що відповідає визначеному на попередньому етапі значенню, яке отримують з пам'яті адаптивного робота. Винахідницький задум полягає в тому, що спосіб ідентифікації стискального зусилля адаптивного робота забезпечує послідовне поетапне здійснення серії спробних рухів для ідентифікації бажаної величини стискального зусилля губок захватного органа, при якому точки контакту губок захватного органа з об'єктом маніпулювання завжди залишаються в межах допустимої контактної зони на поверхні об'єкта маніпулювання. При цьому для широкого класу об'єктів маніпулювання з обмеженими вертикальними геометричними розмірами суттєво підвищується надійність (орієнтовно на 7-10%) та швидкодія (орієнтовно на 5-8%) процесів захоплювання. На рисунку представлені часові діаграми окремих компонентів процесу реалізації запропонованого способу, зокрема процесу нарощування зусилля при стисканні губок, процесу вертикального підйому адаптивним роботом захватного органа при здійсненні серії спробних рухів та процесу формування поточної інформації про проковзування об'єкта маніпулювання. Суть запропонованого способу ідентифікації стискального зусилля адаптивного робота полягає в наступному. Для захоплювання об'єкта маніпулювання з невідомими параметрами (маса, геометричні розміри) та ідентифікації величини стискального зусилля спочатку переміщують захватний орган з двома затискними губками в область робочої зони робота, де знаходиться об'єкт маніпулювання, і орієнтують губки захватного органа таким чином, щоб між ними знаходився об'єкт маніпулювання. Після цього здійснюють неперервний процес стискання губок захватного органа в напрямку скорочення відстані між ними з контролюванням моменту контактування губок з об'єктом маніпулювання і контролюванням величини стискального зусилля F губок. Після реєстрації інформації про одночасне контактування об'єкта маніпулювання з обома губками і подальше створення мінімального стискального зусилля F=FМlN призупиняють процес стискання губок (момент t1 на рисунку). В подальшому почергово здійснюють серії спробних рухів та дискретного нарощування стискального зусилля губок. Зокрема почергово здійснюють: а) вертикальний спробний рух захватного органу за допомогою маніпуляційної системи адаптивного робота, що забезпечує (разом з одночасним припиненням процесу стискання губок) підйом захватного органа у вертикальному напрямку на попередньо визначену постійну величину Δl при реєстрації інформації про проковзування об'єкта маніпулювання між губками захватного органа в процесі здійснення кожного спробного руху; б) стискання губок для нарощування стискального зусилля на відповідну попередньо визначену постійну величину ΔF після здійснення вертикального підйому захватного органа на величину Δl і реєстрації при цьому інформації про проковзування об'єкта маніпулювання в процесі виконання відповідного спробного руху. 47235 8 При цьому всю серію спробних рухів робота розбивають на окремі послідовні етапи (на рисунку наведено приклад з 3-ма етапами реалізації серії спробних рухів), на кожному з яких максимальну кількість спробних рухів Nmax встановлюють у відповідності з вертикальним розміром допустимої контактної зони Lдоп для губок захватного органа на об'єкті маніпулювання. При цьому максимальну кількість спробних рухів Nmax на окремому етапі визначають як округлений до меншого значення результат від ділення розміру допустимої контактної зони Lдoп на величину Δl вертикального підйому захватного органа при здійсненні одного спробноL го руху, тобто Nmax » доп , (для прикладу, навеDl деного на рисунку, максимально можлива кількість спробних рухів Nmax на кожному з послідовних етапів дорівнює 4). В процесі реалізації адаптивним роботом серії спробних рухів постійно порівнюють поточну кількість і здійснених на черговому етапі спробних рухів з максимально можливою на будьякому етапі кількістю спробних рухів Nmax. При виконанні умови i=Nmax (моменти t2, t6 на рисунку) запам'ятовують і зберігають в пам'яті адаптивного робота кінцеве (для завершеного чергового s-гo етапу) значення стискального зусилля = Fs -1 + Fs Nmax å DF (при s=1 величина F0 визнача = 1 j ється як F0=FMIN). Після цього розводять затискні губки протягом часу Δt1 в напрямку збільшення відстані між ними (для наведеного на рисунку прикладу: Δt1=t3-t2 при реалізації 1-го етапу та Δt1=t7-t6 - для 2-го етапу серії спробних рухів). Розведення губок захватного органа здійснюють до зникнення контакту між губками і об'єктом маніпулювання (моменти t3, t7 на рисунку). В подальшому після завершення кожного етапу серії спробних рухів захватний орган за допомогою маніпуляційної системи адаптивного робота протягом часу Δt2 опускають у вертикальному напрямі на відстань lmах, що дорівнює добутку кількості здійснених на черговому 5-му етапі спробних рухів Nmax на величину вертикального переміщення ΔІ захватного органу при реалізації одного спробного руху, lmax=NmaxΔl≤Lдоп (для наведеного на рисунку прикладу: Δt2=t4-t3 при реалізації 1-го етапу серії спробних рухів та Δt2=t8-t7 - для 2-го етапу). Перед реалізацією наступного (s+1)-гo етапу серії спробних рухів (на рисунку: в моменти t4, t8) протягом часу Δt3 здійснюють процес стискання губок зі створенням фіксованої величини стискального зусилля, що відповідає визначеному на попередньому 5-му етапі значенню Fs, яке отримують з пам'яті адаптивного робота (для наведеного на рисунку прикладу Δt3=t5-t4 при реалізації 1-го етапу та Δt2=t9-t8 - для 2-го етапу серії спробних рухів). Після відповідного (r-1)-го кроку нарощування стискального зусилля (на рисунку момент t10) в результаті попередньої реалізації SП повних етапів серії спробних рухів (на рисунку: SП=2) та поточної кількості спробних рухів i на останньому етапі (на рисунку: i=3 для останнього 3-го етапу), де r=SП+i, призупиняють процес покро 9 47235 кового нарощування стискального зусилля з почерговим виконанням спробних рухів у випадку відсутності інформації про проковзування об'єкта маніпулювання при виконанні чергового і-го спробного руху захватного органа (момент t11 на рисунку). При цьому величина стискального зусилля i -1 FОБ = Fs + å DF = FMIN + j =1 Nmax SП + i - 1 å DF j =1 відповідає масі об'єкта маніпулювання (для наведеного на рисунку прикладу 10 2 å = F2 + = FMIN + DF FОБ = 1 j å DF . Цю величину F OБ = 1 j фіксують і здійснюють процес кінцевого стискання губок зі створенням бажаної фіксованої величини стискального зусилля, що відповідає попередньо ідентифікованому згідно з масою об'єкта маніпулювання та масштабованому з відповідним масштабним коефіцієнтом k значенню F=kFОБ (момент Комп’ютерна верстка А. Рябко 10 t12 на рисунку). Масштабний коефіцієнт k>1 вводиться для забезпечення надійного утримання об'єкта маніпулювання при подальшій реалізації відповідної запланованої програмної траєкторії. Позитивний ефект проявляється в тому, що в порівнянні зі способом-прототипом, реалізованим згідно патенту України на корисну модель №41195, даний спосіб ідентифікації стискального зусилля адаптивного робота дозволяє підвищити надійність (орієнтовно на 7-10%) та швидкодію (орієнтовно на 5-8%) процесу захоплювання об'єктів маніпулювання з обмеженими вертикальними геометричними розмірами за рахунок зберігання положення точок контакту губок захватного органа з об'єктом маніпулювання в межах допустимої контактної зони на поверхні об'єкта, маніпулювання при безперервній поетапній реалізації серії спробних рухів для ідентифікації бажаної величини стискального зусилля. Підписне Тираж 28 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod of identification of compressive force of adaptive robot
Автори англійськоюKondratenko Yurii Panteliiovych, Kondratenko Volodymyr Yuriiovych
Назва патенту російськоюСпособ идентификации сжимающего усилия адаптивного робота
Автори російськоюКондратенко Юрий Пантелеевич, Кондратенко Владимир Юрьевич
МПК / Мітки
МПК: G05B 19/00, B25J 19/02
Мітки: робота, зусилля, адаптивного, спосіб, стискального, ідентифікації
Код посилання
<a href="https://ua.patents.su/5-47235-sposib-identifikaci-stiskalnogo-zusillya-adaptivnogo-robota.html" target="_blank" rel="follow" title="База патентів України">Спосіб ідентифікації стискального зусилля адаптивного робота</a>
Спосіб ідентифікації величини стискального зусилля інтелектуального робота
Номер патенту: 41120
Опубліковано: 12.05.2009
Автори: Кондратенко Володимир Юрійович, Кондратенко Юрій Пантелійович, Аль Суод Махмуд мохаммад Салем, Кондратенко Галина Володимирівна
МПК: G05B 19/00, B25J 19/02
Мітки: стискального, спосіб, робота, зусилля, величини, інтелектуального, ідентифікації
Формула / Реферат:
Спосіб ідентифікації величини стискального зусилля інтелектуального робота, згідно з яким переміщують захватний орган з двома затискними губками в область робочої зони робота, де знаходиться об'єкт маніпулювання, і орієнтують губки захватного органа таким чином, щоб між ними знаходився об'єкт маніпулювання, після чого здійснюють стискання губок захватного органа в напрямку скорочення відстані між нимиз контролюванням моментів контактування...
Пристрій ідентифікації та аналізу тактильних сигналів для інформаційно-керуючої системи адаптивного робота

Номер патенту: 40710
Опубліковано: 27.04.2009
Автори: Кондратенко Галина Володимирівна, Запорожець Юрій Михайлович, Шишкін Олександр Сергійович, Кондратенко Юрій Пантелійович
МПК: B25J 19/02
Мітки: аналізу, робота, ідентифікації, сигналів, тактильних, адаптивного, інформаційно-керуючої, системі, пристрій
Формула / Реферат:
Пристрій ідентифікації та аналізу тактильних сигналів для комп'ютерної інформаційно-керуючої системи адаптивного робота з одним входом та трьома виходами, що має у своєму складі послідовно з'єднані перший датчик проковзування деталі й перший підсилювач, тактильний датчик, встановлений на одній з губок захвата робота, перший блок затримки, привід губок захвата, перший елемент АБО, послідовно з'єднані перший RS-тригер, інтегратор, перший...
Спосіб адаптації інтелектуального робота до маси об’єктів маніпулювання
Номер патенту: 41195
Опубліковано: 12.05.2009
Автори: Кондратенко Юрій Пантелійович, Кондратенко Володимир Юрійович
МПК: B25J 19/02, G05B 19/00
Мітки: робота, об'єктів, інтелектуального, адаптації, спосіб, маніпулювання, маси
Формула / Реферат:
Спосіб адаптації інтелектуального робота до маси об'єктів маніпулювання, згідно з яким переміщують захватний орган з принаймні двома затискними губками таким чином, щоб об'єкт маніпулювання знаходився між затискними губками захватного органа в центрованому відносно губок положенні, після чого здійснюють стискання губок у напрямку скорочення відстані між ними і реєструють інформацію про одночасне контактування обох затискних губок з об'єктом...
Інформаційно-керуюча система адаптивного робота

Номер патенту: 42905
Опубліковано: 27.07.2009
Автори: Кондратенко Володимир Юрійович, Кондратенко Юрій Пантелійович
МПК: B25J 19/00
Мітки: робота, інформаційно-керуюча, система, адаптивного
Формула / Реферат:
Інформаційно-керуюча система адаптивного робота з одним входом та трьома виходами, що має у своєму складі послідовно з'єднані датчик проковзування й перший підсилювач, тактильний датчик, встановлений на одній з губок захватного пристрою робота, перший блок затримки, підсилювач потужності, привод губок захватного пристрою, перший елемент АБО, послідовно з'єднані перший RS-тригер, інтегратор та перший пороговий елемент, послідовно з'єднані...
Датчик проковзування об’єкта маніпулювання адаптивного робота
Номер патенту: 36077
Опубліковано: 10.10.2008
Автори: Кондратенко Галина Володимирівна, Чернов Сергій Костянтинович, Кондратенко Юрій Пантелійович, Кондратенко Володимир Юрійович, Марковський Ігор Володимирович
МПК: B25J 19/02
Мітки: робота, адаптивного, датчик, об'єкта, проковзування, маніпулювання
Формула / Реферат:
Датчик проковзування об'єкта маніпулювання адаптивного робота, що містить корпус, в якому розміщено магнітну систему, до складу якої входить циліндричний ролик, виконаний у вигляді принаймні одного замкнутого тороїдального намагніченого магнітопроводу з нанесеним на твірну поверхню ролика захисним пружним покриттям і з можливістю обертання ролика навколо своєї осі, та закріплений на корпусі магніточутливий елемент, до складу якого входять...
Попередній патент: Спосіб зниження динамічних зусиль у замкнутому тяговому органі шахтної канатної дороги
Наступний патент: Жолоб для випуску металевого розплаву із плавильного агрегату
Випадковий патент: Спосіб холодного паяння-зварювання неметалевих матеріалів з металами