Інформаційно-керуюча система адаптивного робота
Номер патенту: 42905
Опубліковано: 27.07.2009
Автори: Кондратенко Володимир Юрійович, Кондратенко Юрій Пантелійович

Формула / Реферат
Інформаційно-керуюча система адаптивного робота з одним входом та трьома виходами, що має у своєму складі послідовно з'єднані датчик проковзування й перший підсилювач, тактильний датчик, встановлений на одній з губок захватного пристрою робота, перший блок затримки, підсилювач потужності, привод губок захватного пристрою, перший елемент АБО, послідовно з'єднані перший RS-тригер, інтегратор та перший пороговий елемент, послідовно з'єднані лічильник, цифро-аналоговий перетворювач, перший суматор, другий керований ключ, подільник напруги, другий суматор та перший керований ключ, а також джерело опорної напруги й послідовно з'єднані другий RS-тригер і третій елемент АБО, вихід якого з'єднаний з керуючим входом першого ключа, при цьому вихід підсилювачапідключений до другого входу першого елемента АБО, перший вхід лічильника підключений до другого входу другого елемента АБО, виходу підсилювача й другого входу третього елемента АБО, вихід першого блока затримки з'єднаний з першим виходом системи й з другим входом другого RS-тригера, перший вхід якого з'єднаний з першим входом системи, вихід другого блока затримки з'єднаний з другими входами першого RS-тригера й лічильника, з третім виходом системи та з першим входом другого елемента АБО, вихід якого підключений до другого входу інтегратора, вихід першого порогового елемента підключений до керуючого входу другого ключа, джерело опорної напруги підключено до другого входу першого суматора, вихід цифро-аналогового перетворювача з'єднаний з входом другого порогового елемента, вихід якого з'єднаний з другим виходом системи, другий вхід другого суматора підключений до другого виходу другого ключа, вихід першого елемента АБО з'єднаний з входом першого блока затримки, а вихід підсилювача потужності з'єднаний з входом приводу губок захватного пристрою, яка відрізняється тим, що до складу системи введені комп'ютерний блок керування, третій суматор з двома прямими та одним інвертованим входом, третій, четвертий, п'ятий, шостий та сьомий керовані ключі, вихід тактильного датчика підключений через шостий керований ключ до перших входів першого елемента АБО й першого RS-тригера, керовані входи п'ятого, шостого і сьомого керованих ключів, а також вхід другого елемента затримки підключені до другого додаткового входу системи, вхід підсилювача потужності з'єднаний з виходом третього суматора, перший вхід якого з'єднаний через третій керований ключ з виходом першого керованого ключа, другий вхід через п'ятий керований ключ - з виходом другого суматора, а третій інвертований вхід через сьомий та четвертий керовані ключі - з виходом джерела опорної напруги, вихід першого порогового елемента підключений до четвертого виходу системи, керованого входу четвертого ключа та до входу елемента ЗАПЕРЕЧЕННЯ, вихід якого з'єднаний з керованим входом третього ключа, причому перший і другий входи, а також перший, другий, третій і четвертий виходи системи підключені до двох відповідних виходів та чотирьох відповідних входів комп'ютерного блока керування.
Текст
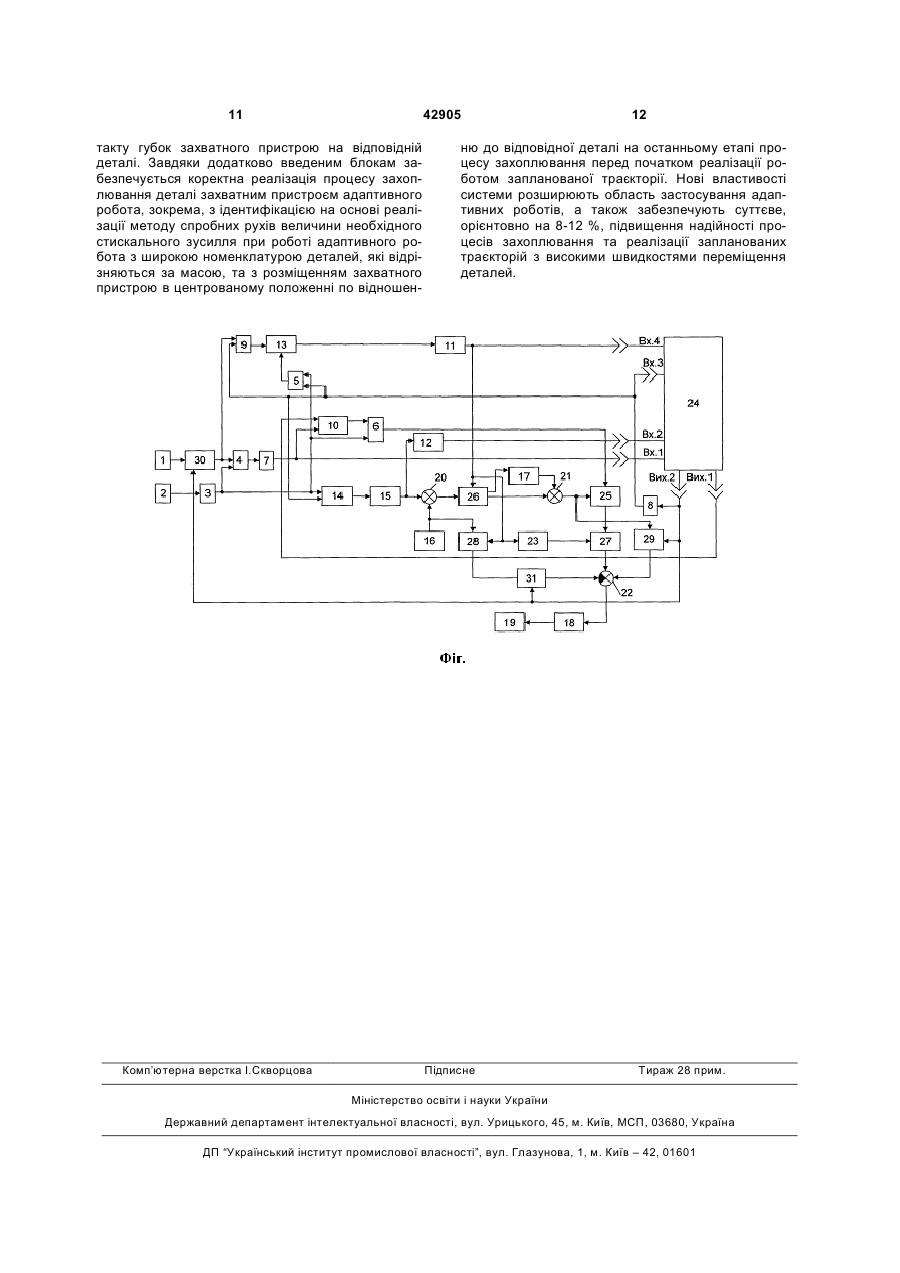
Інформаційно-керуюча система адаптивного робота з одним входом та трьома виходами, що має у своєму складі послідовно з'єднані датчик проковзування й перший підсилювач, тактильний датчик, встановлений на одній з губок захватного пристрою робота, перший блок затримки, підсилювач потужності, привод губок захватного пристрою, перший елемент АБО, послідовно з'єднані перший RS-тригер, інтегратор та перший пороговий елемент, послідовно з'єднані лічильник, цифро-аналоговий перетворювач, перший суматор, другий керований ключ, подільник напруги, другий суматор та перший керований ключ, а також джерело опорної напруги й послідовно з'єднані другий RS-тригер і третій елемент АБО, вихід якого з'єднаний з керуючим входом першого ключа, при цьому вихід підсилювача підключений до другого входу першого елемента АБО, перший вхід лічильника підключений до другого входу другого елемента АБО, виходу підсилювача й другого входу третього елемента АБО, вихід першого блока затримки з'єднаний з першим виходом системи й з другим входом другого RS-тригера, перший вхід якого з'єднаний з першим входом системи, вихід другого блока затримки з'єднаний з другими входами першого RS-тригера й лічильника, з третім виходом системи та з першим входом другого елемента АБО, вихід якого підключений до другого входу інтегратора, вихід першого порогового еле U 2 UA 1 3 проковзуванні деталей в захватному пристрої робота, дозволяють автоматизувати процеси керування адаптивним роботом при виконанні різних технологічних операцій (автоматичного створення необхідного і достатнього стискального зусилля захватним пристроєм робота при захоплюванні деталі, автоматичне реагування на наявність перешкоди на шляху траєкторії переміщення деталі та/або зміну ваги деталі тощо). Прикладом є пристрій (система) для керування адаптивним роботом [Авт. свід. СРСР №1188700, МКІ G 05В 19/00, опубл. Бюл. №40, 1985], що містить захватний орган з губками, блок задавання програми, тактильні датчики, перший і другий приводи відповідно для стискання губок та підйому захватного органу, датчик проковзування, послідовно з'єднані підсилювач, диференціатор, пороговий елемент, RSтригер, елемент ЗАПЕРЕЧЕННЯ й перший ключ, а також послідовно підключені елемент І й другий ключ, вихід якого з'єднаний з входом другого приводу, а другий вхід - з першим виходом блоку задавання програми, підключеного другим виходом до другого входу RS-тригера, а третім виходом до другого входу першого ключа, вихід якого з'єднаний з входом першого приводу стискання губок, вихід датчика проковзування з'єднаний з входом підсилювача, а виходи тактильних датчиків з'єднані з першим і другим входами елемента І. Така система має наступні проблеми: - низька надійність утримання деталі під час реалізації динамічних режимів маніпулювання (через створення величини стискального зусилля, що відповідає масі деталі у статичному режимі); - низькі функціональні можливості при захоплюванні деталей (з невідомою масою) з забезпеченням необхідного фіксованого (наприклад, центрованого) положення губок захватного пристрою на деталі в процесі реалізації адаптивним роботом запланованої траєкторії. Найбільш близькою до запропонованої є інформаційно-керуюча система для адаптації робота до ваги захоплюваних деталей [а. с. СРСР №1395436, В25 J 13/00, 1988], що прийнята як прототип. Ця інформаційно-керуюча система адаптивного робота з одним входом та трьома виходами має у своєму складі послідовно з'єднані датчик проковзування й перший підсилювач, тактильний датчик, встановлений на одній з губок захватного пристрою робота, перший блок затримки, підсилювач потужності, привод губок захватного пристрою, перший елемент АБО, послідовно з'єднані перший RS-тригер, інтегратор, перший пороговий елемент, другий блок затримки та другий елемент АБО, послідовно з'єднані лічильник, цифро-аналоговий перетворювач, перший суматор, другий керований ключ, подільник напруги, другий суматор, перший керований ключ та підсилювач потужності, а також другий пороговий елемент, джерело опорної напруги й послідовно з'єднані другий RS-тригер і третій елемент АБО, вихід якого з'єднаний з керуючим входом першого ключа, при цьому вихід тактильного датчика підключено до перших входів першого елемента АБО й першого RS-тригера, вихід першого підсилювача підключено до другого входу першого елемента 42905 4 АБО, першого входу лічильника, до другого входу другого елемента АБО та другого входу третього елемента АБО, вихід першого блоку затримки з'єднаний з першим виходом системи й з другим входом другого RS-тригера, перший вхід якого з'єднаний з першим входом системи, вихід другого блоку затримки з'єднаний з другими входами першого RS-тригера й лічильника, а також з третім виходом системи та з першим входом другого елемента АБО, вихід якого підключений до другого входу інтегратора, вихід першого порогового елемента підключений до третього входу третього елемента АБО та до керуючого входу другого ключа, джерело опорної напруги підключено до другого входу першого суматора, вихід цифроаналогового перетворювача з'єднаний з входом другого порогового елемента, вихід якого з'єднаний з другим виходом системи, другий вхід другого суматора підключений до другого виходу другого ключа, вихід першого елемента АБО з'єднаний з входом першого блоку затримки, а вихід підсилювача потужності з'єднаний з входом привода губок захватного пристрою. Принцип роботи системи оснований на реєстрації сигналів проковзування, що надходять з датчика проковзування під час здійснення роботом серії спробних рухів, та на покроковому нарощуванні величини стискального зусилля захватного пристрою після кожного спробного руху (при наявності проковзування деталі). Сигнали проковзування виникають у випадках, коли величини стискального зусилля захватного пристрою недостатньо для утримання деталі, тобто коли величина стискального зусилля не відповідає масі деталі. Така система має наступні проблеми: - система після завершення процесу захоплювання деталі захватним пристроєм робота (з реалізацією серії спробних рухів) забезпечує фіксацію губок захватного пристрою на деталі в положенні, що завжди буде зміщеним відносно центра деталі. Величина такого зміщення - це відстань, яку проходить у вертикальному напрямку захватний пристрій при здійсненні адаптивним роботом всіх спробних рухів в процесі формування необхідної величини стискального зусилля, що відповідає попередньо невідомій масі деталі. Це призводить до необхідності зниження швидкостей переміщення адаптивним роботом деталей такого класу для забезпечення надійної реалізації запланованих траєкторій, а в цілому до зниження швидкодії відповідних технологічних процесів; - мають місце обмежені функціональні можливості системи, що не дозволяють адаптивному роботу здійснювати в автоматичному режимі захоплювання деталей (з невідомою масою) при необхідності забезпечення заданого фіксованого (наприклад, центрованого) положення губок захватного пристрою на деталі в процесі реалізації адаптивним роботом запланованої траєкторії. В основу корисної моделі поставлено задачу удосконалення інформаційно-керуючої системи адаптивного робота шляхом зміни схемотехнічного виконання системи та введення додаткових електронних блоків, що дозволить при захоплюванні деталей з невідомою масою в автоматично 5 му режимі здійснювати центрування положення губок захватного пристрою на деталі згідно з їх апріорно заданою фіксованою позицією перед реалізацією адаптивним роботом запланованої траєкторії. Поставлена задача вирішується тим, що інформаційно-керуюча система адаптивного робота з одним входом та трьома виходами, яка має у своєму складі послідовно з'єднані датчик проковзування й перший підсилювач, тактильний датчик, встановлений на одній з губок захватного пристрою робота, перший блок затримки, підсилювач потужності, привод губок захватного пристрою, перший елемент АБО, послідовно з'єднані перший RS-тригер, інтегратор та перший пороговий елемент, послідовно з'єднані лічильник, цифроаналоговий перетворювач, перший суматор, другий керований ключ, подільник напруги, другий суматор та перший керований ключ, а також джерело опорної напруги й послідовно з'єднані другий RS-тригер і третій елемент АБО, вихід якого з'єднаний з керуючим входом першого ключа, при цьому вихід першого підсилювача підключено до другого входу першого елемента АБО, перший вхід лічильника підключений до другого входу другого елемента АБО, виходу підсилювача й другого входу третього елемента АБО, вихід першого блоку затримки з'єднаний з першим виходом системи й з другим входом другого RS-тригера, перший вхід якого з'єднаний з першим входом системи, вихід другого блоку затримки з'єднаний з другими входами першого RS-тригера й лічильника, з третім виходом системи та з першим входом другого елемента АБО, вихід якого підключений до другого входу інтегратора, вихід першого порогового елемента підключений до керуючого входу другого ключа, джерело опорної напруги підключено до другого входу першого суматора, вихід цифроаналогового перетворювача з'єднаний з входом другого порогового елемента, вихід якого з'єднаний з другим виходом системи, другий вхід другого суматора підключений до другого виходу другого ключа, вихід першого елемента АБО з'єднаний з входом першого блоку затримки, а вихід підсилювача потужності з'єднаний з входом привода губок захватного пристрою, згідно до пропозиції до складу системи введені комп'ютерний блок керування, третій суматор з двома прямими та одним інвертованим входом, третій, четвертий, п'ятий, шостий та сьомий керовані ключі, вихід тактильного датчика підключено через шостий керований ключ до перших входів першого елемента АБО й першого RS-тригера, керовані входи п'ятого, шостого і сьомого керованих ключів, а також вхід другого елемента затримки підключено до другого додаткового входу системи, вхід підсилювача потужності з'єднаний з виходом третього суматора, перший вхід якого з'єднаний через третій керований ключ з виходом першого керованого ключа, другий вхід - через п'ятий керований ключ з виходом другого суматора, а третій інвертований вхід через сьомий та четвертий керовані ключі з виходом джерела опорної напруги, вихід першого порогового елемента підключено до четвертого виходу системи, керованого входу четвертого ключа 42905 6 та до входу елемента ЗАПЕРЕЧЕННЯ, вихід якого з'єднано з керованим входом третього ключа, причому перший і другий входи, а також перший, другий, третій і четвертий виходи системи підключено до двох відповідних виходів та чотирьох відповідних входів комп'ютерного блоку керування. Введення додаткових електронних блоків дає можливість адаптивному роботу після здійснення серії спробних рухів в автоматичному режимі ідентифікувати необхідну величину стискального зусилля відповідно до маси захоплюваної деталі, запам'ятовувати цю величину системою та створювати збережене в пам'яті системи значення стискального зусилля між губками захватного пристрою після їх відповідного переміщення в апріорно задану фіксовану позицію на деталі з подальшою реалізацією адаптивним роботом запланованої траєкторії. При цьому суттєво підвищується надійність (орієнтовно на 8-12 %) процесів захоплювання та реалізації запланованих траєкторій з високими швидкостями переміщення об'єктів маніпулювання. На рисунку представлено схему інформаційнокеруючої системи адаптивного робота. Система містить тактильний датчик 1, датчик проковзування 2, підсилювач 3, перший 4, другий 5 та третій 6 елементи АБО, перший 7 і другий 8 блоки затримки, перший 9 та другий 10 RS-тригери, перший 11 і другий 12 порогові елементи, інтегратор 13, лічильник 14, цифро-аналоговий перетворювач 15, джерело 16 опорної напруги, подільник напруги 17, підсилювач потужності 18, привод 19 губок захвата, перший 20, другий 21 і третій 22 суматори, елемент ЗАПЕРЕЧЕННЯ 23, комп'ютерний блок керування 24, а також перший 25, другий 26, третій 27, четвертий 28, п'ятий 29, шостий 30 та сьомий 31 керовані ключі. Вихід тактильного датчика 1 через шостий керований ключ 30 підключений до перших входів першого елемента АБО 4 і першого RS-тригера 9, вихід якого з'єднаний з першим входом інтегратора 13. Вихід датчика проковзування 2 через перший підсилювач 3 підключено до першого входу лічильника 14 і до других входів першого 4, другого 5 та третього 6 елементів АБО. Вихід першого елемента АБО 4 через перший блок затримки 7 з'єднаний з першим виходом системи, який підключений до відповідного першого входу комп'ютерного блоку керування 24, й з другим входом другого RS-тригера 10, перший вхід якого підключений до першого виходу комп'ютерного блоку керування 24, а вихід - до першого входу третього елемента АБО 6. Вихід лічильника 14 через послідовно з'єднані цифро-аналоговий перетворювач 15 та другий пороговий елемент 12 з'єднаний з другим виходом системи, з'єднаним з відповідним другим входом комп'ютерного блоку керування 24. Вихід цифро-аналогового перетворювача 15 підключений також до першого входу першого суматора 20, до другого входу якого підключено джерело опорної напруги 16, а до виходу - сигнальний вхід другого керованого ключа 26. Перший сигнальний вихід другого керованого ключа 26 з'єднаний через подільник напруги 17 з першим входом другого суматора 21, а другий сигнальний вихід - з другим входом другого суматора 7 21, вихід якого через послідовно з'єднані перший 25 та третій 27 керовані ключі підключений до першого входу третього суматора 22, другий вхід якого через п'ятий керований ключ 29 зв'язаний з виходом другого суматора 21, а третій інвертований вхід - через сьомий 31 та четвертий 28 керовані ключі з виходом джерела опорної напруги 16. Вихід третього елемента АБО з'єднаний з керованим входом першого ключа 25. Другий вихід комп'ютерного блоку керування 24 підключений до керованих входів п'ятого 29, шостого 30 і сьомого 31 керованих ключів, а також до входу другого елемента затримки 8, вихід якого з'єднаний з другими входами першого RS-тригера 9 й лічильника 14, з першим входом другого елемента АБО 5 та з третім виходом системи, що підключений до відповідного третього входу комп'ютерного блоку керування 24. Вихід другого елемента АБО 5 підключений до другого входу інтегратора 13, вихід якого через перший пороговий елемент 11 підключений до керованих входів другого 26 та четвертого 28 ключів, входу елемента ЗАПЕРЕЧЕННЯ 23 та четвертого виходу системи, підключеного до відповідного четвертого входу комп'ютерного блоку керування 24. Вихід елемента ЗАПЕРЕЧЕННЯ 23 з'єднаний з керованим входом третього ключа 27, а вихід третього суматора 22 через підсилювач потужності 18 підключений до входу привода 19 губок захватного пристрою. В якості тактильного датчика 1 може бути використаний датчик, що встановлюється на одній з губок захватного пристрою адаптивного робота, з однозначним вихідним дискретним сигналом, що відповідає наявності (наприклад, логічна 1) або відсутності (наприклад, логічний 0) контакту деталі з губкою захватного пристрою робота. В якості датчика проковзування 2 можуть бути використані датчики проковзування, що реєструють наявність проковзування деталі в захватному пристрої робота й формують на виході датчика однозначний дискретний сигнал, що відповідає наявності (логічна 1) або відсутності (логічний 0) проковзування (наприклад, датчики проковзування відповідно Патенту України на корисну модель №27722, 2007 та Патенту України на винахід №79155, 2007). Комп'ютерний блок керування 24 може бути реалізований на програмно-апаратному рівні за допомогою мікроконтролерів (наприклад, фірм Motorola, Microchip, Toshiba та ін.) або на базі ЕОМ. Запропонований пристрій працює таким чином. У початковому стані (перед захоплюванням деталі) губки захватного пристрою розведені, на виходах тактильного датчика 1 та датчика проковзування 2 встановлені сигнали нульового рівня, перший 9, другий 10 RS-тригери та лічильник 14 знаходяться у нульовому стані, а відповідно, на виході цифро-аналогового перетворювача 15 напруга дорівнює нулю. При цьому напруга на виході першого суматора 20 відповідає напрузі UÎÏ, встановленій на виході джерела опорної напруги 16. Сигнальні входи першого 25, четвертого 28 і п'ятого 29 ключів відключені від їх відповідних виходів, сигнальні входи третього 27, шостого 30 і сьомого 42905 8 31 ключів підключені до їх відповідних виходів, а сигнальний вхід другого ключа 26 з'єднаний з його першим сигнальним виходом, підключеним до входу подільника напруги 17 з коефіцієнтом ділення К. Оскільки вихід подільника напруги 17 з'єднаний з першим входом другого суматора 21, то на виході останнього встановлюється сигнал, який Uˆ && U0 = I I K . На першому виході відповідає напрузі комп'ютерного блоку керування 24 формується імпульс запуску, який є сигналом про необхідність виконання і початок операції захоплюванням деталі. Цей імпульс поступає на перший вхід другого RS-тригера 10 і встановлює його в одиничний стан. При цьому сигнал логічної одиниці поступає на перший вхід третього елемента АБО 6, на виході якого також встановлюється сигнал логічної одиниці, який, будучи поданим на керований вхід першого ключа 25, забезпечує його спрацьовування, що призводить до проходження сигналу з виходу другого суматора 21 на вхід підсилювача потужності 18, а з останнього - на привод губок захватного пристрою 19. Сигнал U0 забезпечує створення приводом 19 губок захватного пристрою мінімального (початкового) стискального зусилля. Губки захватного пристрою під дією приводу 19 починають зближуватись. У момент торкання деталі губками захватного пристрою спрацьовує тактильний датчик 1, імпульс з виходу якого подається на перший вхід першого RS-тригера 9 і на перший вхід першого елемента АБО 4. Цей імпульс переводить перший RS-тригер 9 в одиничний стан, тобто на його виході формується сигнал, що відповідає рівню логічної одиниці, який поступає на перший вхід інтегратора 13, на виході якого формується сигнал лінійно наростаючої напруги. При цьому також формується сигнал на виході першого елемента АБО 4, який, будучи затриманим першим блоком затримки 7, поступає на перший вхід комп'ютерного блоку керування 24, даючи команду на здійснення спробного руху, а також на другий вхід другого RS-тригера 10, переводячи його у нульовий стан. Нульовий сигнал на виході останнього викликає появу логічного нуля на виході третього елемента АБО 6, а відповідно, розмикання першого керованого ключа 25. Напруга з виходу другого суматора 21 відключається від підсилювача потужності 18 і привод 19 припиняє процес стискання губок захватного пристрою. Адаптивний робот виконує спробний рух, тобто переміщує захватний пристрій з деталлю на відповідну апріорно визначену відстань у вертикальному напрямі. Якщо стискального зусилля недостатньо для утримання деталі, то вона починає проковзувати між губками захватного пристрою, що викликає спрацьовування датчика проковзування 2, сигнал з якого, будучи посиленим підсилювачем 3, подається на другий вхід першого елемента АБО 4, на перший вхід лічильника 14, на другий вхід третього елемента АБО 6 та на перший вхід другого елемента АБО 5. На виході останнього також з'являється сигнал, який подається на другий вхід інтегратора 13, внаслідок чого напруга на виході інтегратора 13 скидається до 9 нуля. Сигнал, який поступає на перший вхід лічильника 14, викликає збільшення у двійковому коді на одиницю стану на його виході, а відповідно, і приріст напруги ∆U на виході цифро-аналогового перетворювача 15, яка поступає на перший вхід першого суматора 20. Вихідний сигнал U01=UОП+∆U суматора 20 поступає через другий ключ 26 та подільник напруги 17 на перший вхід другого суматора 21, на виході якого встановлюU U1 = 01 K . Сигнал на другому вході ється сигнал третього елемента АБО 6 викликає появу логічної одиниці на виході останнього, спрацьовування першого керованого ключа 25, через який напруга U1 що відповідає наступному кроку нарощування стискального зусилля, поступає (через третій суматор 22) на підсилювач потужності 18, а з нього на привод 19, який формує нове стискальне зусилля. Сигнал на другому вході першого елемента АБО 4 викликає появу сигналу на виході останнього. Цей сигнал, будучи затриманим за часом першим блоком затримки 7, що необхідно для того, щоб привод 19 встиг відпрацювати нове значення стискального зусилля, поступає на перший вхід комп'ютерного блоку керування 24 і є одночасно командою на здійснення нового спробного руху. Вказана послідовність операцій буде продовжуватись до тих пір, поки стискальне зусилля не стане достатнім для надійної фіксації деталі між губками захватного пристрою. В цьому випадку сигнал на виході датчика проковзування 2 при наступному спробному русі буде відсутнім, а відповідно, не поступає і скидальний імпульс на другий вхід інтегратора 13. Напруга на виході інтегратора 13 зростає, поки не досягне рівня спрацьовування першого порогового елемента 11, який при цьому подає сигнал на керовані входи другого ключа 26, четвертого ключа 28 та через елемент ЗАПЕРЕЧЕННЯ 23 - на керований вхід третього ключа 27. При цьому розмикається третій ключ 27, замикається четвертий ключ 28, а сигнальний вхід другого ключа 26 відключається від його першого сигнального виходу і підключається до другого сигнального виходу. Це призводить до того, що вихідний сигнал U0i=UОП+i∆U (де i - номер ступені стискального зусилля) першого суматора 20 надходить на другий вхід другого суматора 21, оминаючи подільник напруги 17, тобто буде в K разів більше величини сигналу Ui При цьому останнє збільшення напруги в K разів необхідне для створення в подальшому стискального зусилля, що буде виключати випадіння деталі з захватного пристрою в динамічних режимах, зокрема внаслідок прискорень, що виникають при реалізації адаптивним роботом запланованих траєкторій на високих швидкостях. В процесі виконання серії спробних рухів точки контакту губок захватного пристрою з деталлю зміщуються у вертикальному напрямку на відстань, що залежить від кількості здійснених спробних рухів. При замиканні четвертого ключа 28 напруга з виходу джерела опорної напруги 16 подається на третій інвертований вхід третього суматора 22, на виході якого при цьому формується сигнал - UÎÏ, який через підсилювач потужності 18 подається на привод 42905 10 19, забезпечуючи розведення губок до початкового стану перед захоплюванням деталі. Вихідний сигнал з першого порогового елемента 11 поступає також на четвертий вхід комп'ютерного блоку керування 24, чим блоку 24 надається інформація про те, що масштабоване значення величини стискального зусилля, яке відповідає попередньо невідомій масі деталі, є ідентифікованим і зберігається на виході другого суматора 21 у вигляді сигналу U0i. Для забезпечення захоплювання деталі з центрованим положенням точок контакту губок, що відповідає початковому положенню точок контакту при створенні адаптивним роботом мінімального стискального зусилля, комп'ютерний блок керування 24 надає команду адаптивному роботу на переміщення вниз захватного пристрою у вертикальному напрямку. Після прийняття захватним пристроєм початкового положення перед захоплюванням деталі комп'ютерний блок керування 24 формує на своєму другому виході сигнал, який подається на керовані входи п'ятого 29, шостого 30 і сьомого ключів 31, а також на вхід другого елементу затримки 8. При цьому сьомий ключ 31 розмикається, відключаючи джерело опорної напруги 16 від інвертованого входу третього суматора 22, шостий ключ 30 розмикається, відключаючи тактильний датчик 1 від входів відповідних елементів системи, а п'ятий ключ 29 замикається, забезпечуючи подачу сигналу збільшеної в К разів напруги U0i з виходу другого суматора 21 (через третій суматор 22) на підсилювач потужності 18 і далі - на привод 19, який відповідно створює необхідну масштабовану величину стискального зусилля, що відповідає масі деталі. Вихідний сигнал другого блоку затримки 8, час затримки якого забезпечує створення приводом 19 масштабованої величини стискального зусилля, подається на третій вхід комп'ютерного блоку керування 24, після чого адаптивний робот може здійснювати необхідну технологічну операцію, а також на другий вхід першого RS-тригера 9, скидаючи тригер у нульовий стан, перший вхід другого елемента АБО 5, забезпечуючи скидання інтегратора 13 у нульовий стан, і на другий вхід лічильника 14, який при цьому знову повертається до нульового стану. Таким чином система знаходиться у початковому стані перед захоплюванням наступної деталі. Якщо при здійсненні серії спробних рухів на передостанньому (r-1)-му спробному кроці, кількість r яких визначається розрядністю лічильника 14, надійна фіксація деталі між губками захватного пристрою не забезпечується, то вихідна напруга ∆Ur=r∆U цифро-аналогового перетворювача 15 призводить до спрацьовування другого порогового елемента 12, а відповідно, на другий вихід системи та другий вхід комп'ютерного блоку керування 24 подається сигнал, який буде інформувати про неможливість здійснення захоплювання деталі. Позитивний ефект проявляється в тому, що в порівнянні з системою по а. с СРСР №1395436 до складу запропонованої системи введено додаткові електронні блоки та комп'ютерний блок керування, що дозволяє системі створювати необхідне стискальне зусилля для захоплювання деталей з невідомою масою при заданому положенні точок кон 11 42905 такту губок захватного пристрою на відповідній деталі. Завдяки додатково введеним блокам забезпечується коректна реалізація процесу захоплювання деталі захватним пристроєм адаптивного робота, зокрема, з ідентифікацією на основі реалізації методу спробних рухів величини необхідного стискального зусилля при роботі адаптивного робота з широкою номенклатурою деталей, які відрізняються за масою, та з розміщенням захватного пристрою в центрованому положенні по відношен Комп’ютерна верстка І.Скворцова 12 ню до відповідної деталі на останньому етапі процесу захоплювання перед початком реалізації роботом запланованої траєкторії. Нові властивості системи розширюють область застосування адаптивних роботів, а також забезпечують суттєве, орієнтовно на 8-12 %, підвищення надійності процесів захоплювання та реалізації запланованих траєкторій з високими швидкостями переміщення деталей. Підписне Тираж 28 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюInformation-control system of adaptive robot
Автори англійськоюKondratenko Yurii Panteliiovych, Kondratenko Volodymyr Yuriiovych
Назва патенту російськоюИнформационно-управляющая система адаптивного робота
Автори російськоюКондратенко Юрий Пантелеевич, Кондратенко Владимир Юрьевич
МПК / Мітки
МПК: B25J 19/00
Мітки: інформаційно-керуюча, адаптивного, робота, система
Код посилання
<a href="https://ua.patents.su/6-42905-informacijjno-keruyucha-sistema-adaptivnogo-robota.html" target="_blank" rel="follow" title="База патентів України">Інформаційно-керуюча система адаптивного робота</a>
Пристрій ідентифікації та аналізу тактильних сигналів для інформаційно-керуючої системи адаптивного робота

Номер патенту: 40710
Опубліковано: 27.04.2009
Автори: Шишкін Олександр Сергійович, Кондратенко Галина Володимирівна, Запорожець Юрій Михайлович, Кондратенко Юрій Пантелійович
МПК: B25J 19/02
Мітки: адаптивного, аналізу, робота, сигналів, інформаційно-керуючої, системі, тактильних, ідентифікації, пристрій
Формула / Реферат:
Пристрій ідентифікації та аналізу тактильних сигналів для комп'ютерної інформаційно-керуючої системи адаптивного робота з одним входом та трьома виходами, що має у своєму складі послідовно з'єднані перший датчик проковзування деталі й перший підсилювач, тактильний датчик, встановлений на одній з губок захвата робота, перший блок затримки, привід губок захвата, перший елемент АБО, послідовно з'єднані перший RS-тригер, інтегратор, перший...
Датчик проковзування об’єкта маніпулювання адаптивного робота
Номер патенту: 36077
Опубліковано: 10.10.2008
Автори: Марковський Ігор Володимирович, Кондратенко Юрій Пантелійович, Кондратенко Галина Володимирівна, Чернов Сергій Костянтинович, Кондратенко Володимир Юрійович
МПК: B25J 19/02
Мітки: робота, датчик, маніпулювання, адаптивного, об'єкта, проковзування
Формула / Реферат:
Датчик проковзування об'єкта маніпулювання адаптивного робота, що містить корпус, в якому розміщено магнітну систему, до складу якої входить циліндричний ролик, виконаний у вигляді принаймні одного замкнутого тороїдального намагніченого магнітопроводу з нанесеним на твірну поверхню ролика захисним пружним покриттям і з можливістю обертання ролика навколо своєї осі, та закріплений на корпусі магніточутливий елемент, до складу якого входять...
Багатофункціональний кистьовий пристрій адаптивного робота
Номер патенту: 24270
Опубліковано: 25.06.2007
Автори: Швець Едуард Анатолійович, Марковський Ігор Володимирович, Кондратенко Володимир Юрійович, Чернов Сергій Костянтинович, Кондратенко Юрій Пантелійович
МПК: B25J 15/00
Мітки: кистьовий, адаптивного, багатофункціональний, робота, пристрій
Формула / Реферат:
Багатофункціональний кистьовий пристрій адаптивного робота, що містить дві пари захватних органів, основу, перший компонент головного корпусу, додатковий корпус, в якому закріплено привід захватних органів, кінематично зв'язаний з гвинтовою парою, зовнішній і внутрішній порожнинні циліндричні елементи, встановлені коаксіально гвинту гвинтової пари, та закріплений на основі перший керований фіксатор, виконаний у вигляді електромагніта, рухомий...
Система адаптивного керування процесом різання
Номер патенту: 15659
Опубліковано: 17.07.2006
Автори: Шевченко Вадим Володимирович, Любас Андрій Валентинович
МПК: B23Q 15/00
Мітки: керування, процесом, система, різання, адаптивного
Формула / Реферат:
Система адаптивного керування процесом різання, що містить струмознімач зв'язаний з різальним інструментом та датчиком ЕРС різання, який послідовно з'єднаний з пристроєм порівняння, до якого підключено пристрій задавання оптимального значення ЕРС різання, блоком керування режимами різання, при цьому система оснащена блоком вимірювання шорсткості, котрий містить послідовно з'єднані лінзу, модулятор, фотоприймач інфрачервоного випромінювання,...
Датчик проковзування адаптивного робота
Номер патенту: 15635
Опубліковано: 17.07.2006
Автори: Кондратенко Юрій Пантелійович, Кондратенко Володимир Юрійович, Крутських Сергій Владиславович
МПК: B25J 19/02
Мітки: датчик, проковзування, адаптивного, робота
Формула / Реферат:
Датчик проковзування адаптивного робота, що містить корпус, в якому встановлено чутливий елемент, виконаний у вигляді циліндричного ролика з можливістю повороту навколо своєї осі, робоча поверхня якого виконана з еластичного матеріалу, і систему реєстрації сигналу проковзування, який відрізняється тим, що система реєстрації сигналу проковзування виконана у вигляді двосекційного конденсатора, дві нерухомі обкладки якого через діелектрик...
Попередній патент: Пристрій для подачі електродного дроту
Наступний патент: Спосіб культивування анаеробних бактерій
Випадковий патент: Пристрій сифонного типу бассараба г.о. для розливу рідини і напоїв з ємності і насичення їх вуглекислим газом