Спосіб автоматичного керування процесом випічки хліба
Номер патенту: 79307
Опубліковано: 25.04.2013
Автори: Левінський Валерій Михайлович, Кирилов Костянтин Олегович

Формула / Реферат
Спосіб автоматичного управління процесом випічки хліба, що включає вимір вологості в зоні зволоження і температур в зоні зволоження, першій та другій зоні випічки, порівняння їх з заданими значеннями, регулювання температур шляхом регулювання подачі продуктів згорання в зону зволоження, першу та другу зону випічки і вологості, шляхом регулювання подачі пари в зону зволоження, за рахунок зміни положення регулюючих органів, який відрізняється тим, що для компенсації перехресних зв'язків, які впливають на сусідні канали, вводять корегуючі зв'язки, які забезпечують автономність контурів регулювання один від одного.
Текст
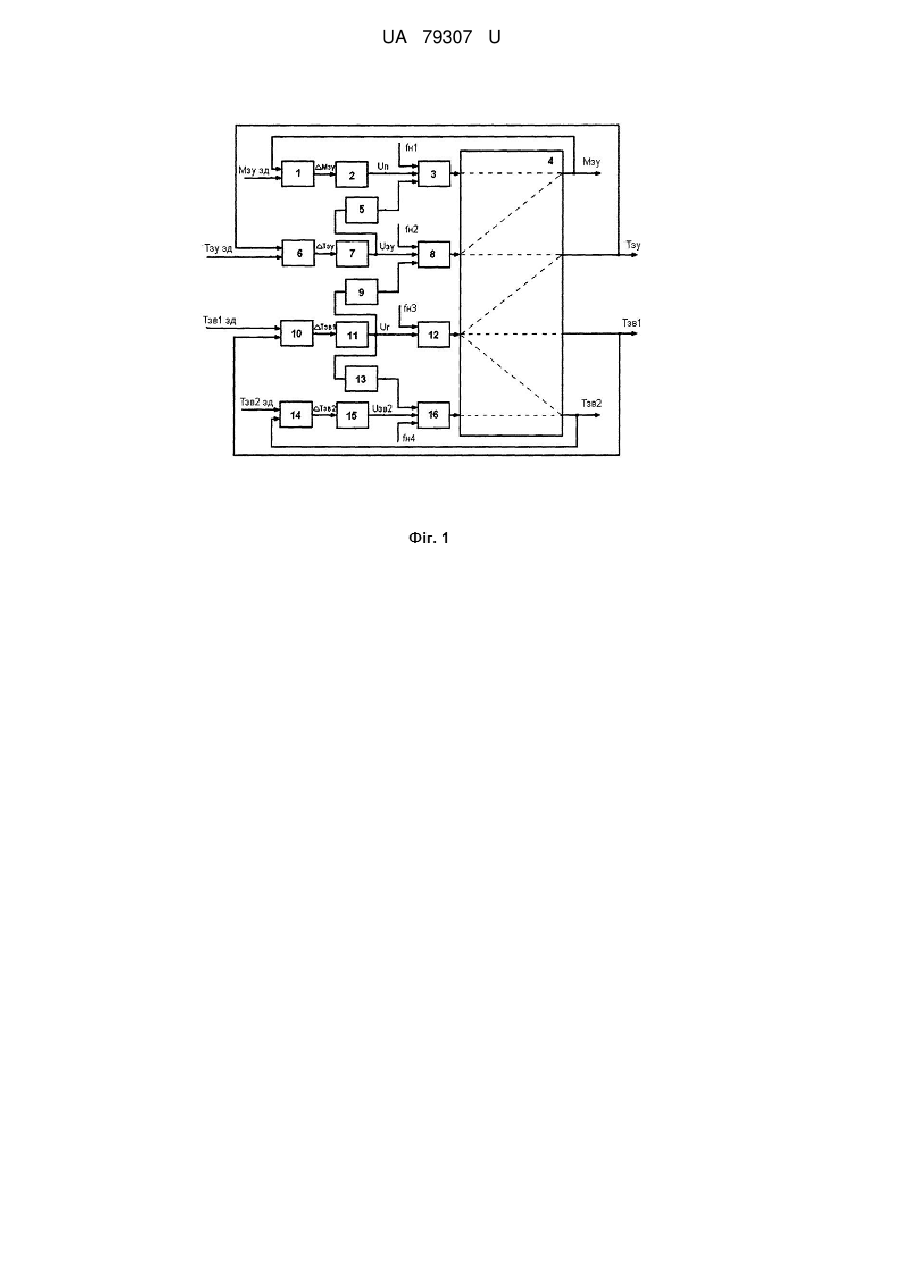
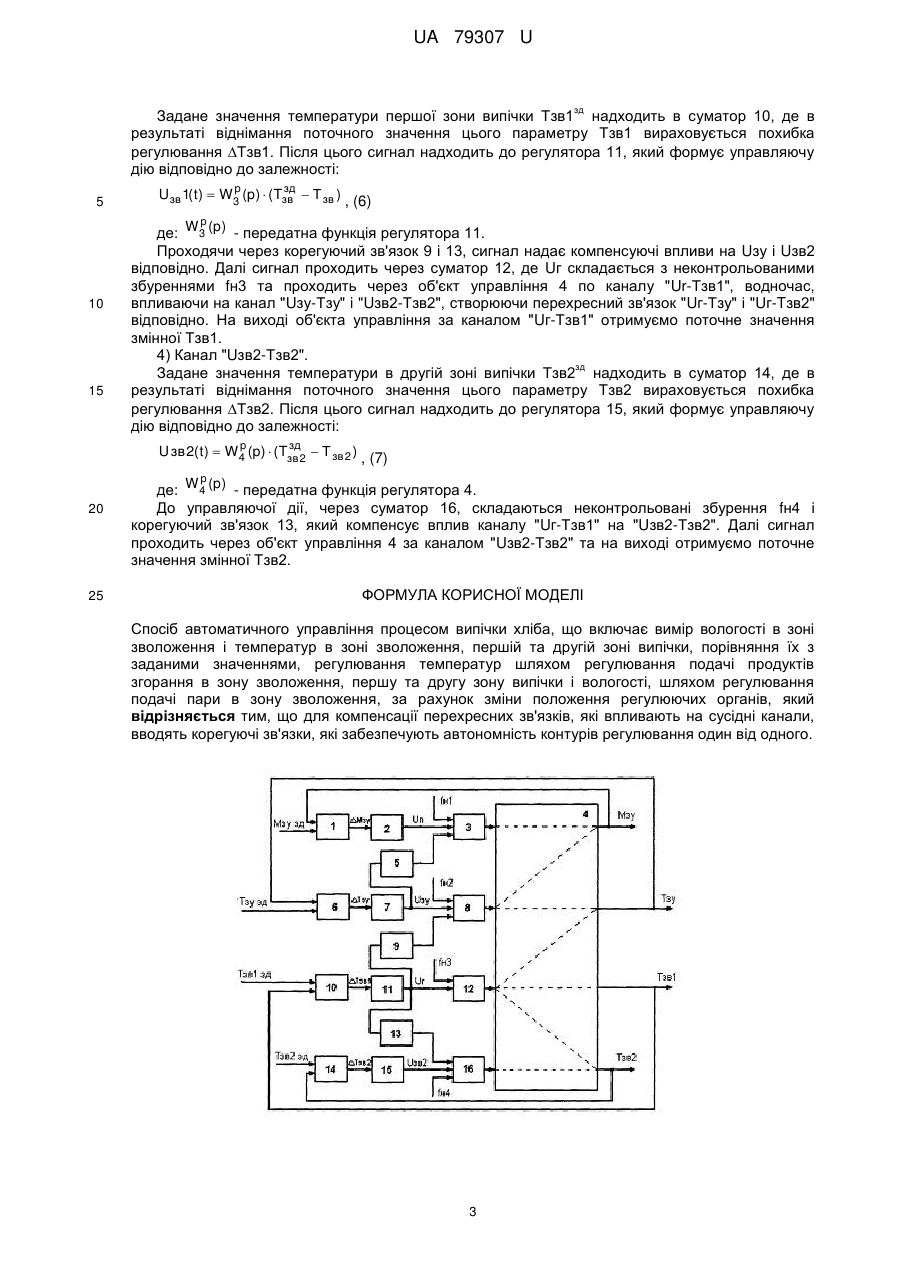
Реферат: UA 79307 U UA 79307 U 5 10 15 20 25 30 35 40 45 Корисна модель належить до виробництва хлібобулочних виробів шляхом випічки, зокрема до автоматичного управління процесом випічки або споріднених обмінних процесів, в яких тістові заготовки контактують з паром і теплом, яке передається від продуктів згорання газу через стінки печі. Запропонований спосіб знайде використання при виробництві хлібобулочних виробів на хлібзаводах. Відомий спосіб управління процесом випічки хліба в печі, який передбачає попереднє зволоження тістових заготовок в зоні зволоження. Завдяки цьому тісто прогрівається глибше, а скоринка не підгорає [Гудвин Г.К. - Проектирование систем управления - М.: БИНОМ. Лаборатория знаний, 2004.; с. 911, ил.]. Недоліком цього способу є те, що він не враховує наявності перехресних зв'язків, які здійснюють сильний вплив на динаміку перехідних характеристик, що забезпечує низьку динамічну точність системи. Найбільш близьким до пропонованого є спосіб управління процесом випічки хліба при наявності регулюючих органів, які регулюють подачу продуктів згорання в зону зволоження та другу зону випічки. Цей спосіб управління передбачає вимір вологості в зоні зволоження і температур в зоні зволоження, першій та другій зоні випічки, порівняння їх з заданими значеннями, регулювання температур шляхом регулювання подачі продуктів згорання в зону зволоження, першу та другу зону випічки і вологості, шляхом регулювання подачі пари в зону зволоження, за рахунок зміни положення регулюючих органів. [М.Л. Мандельштейн - АСУТП Брагоректификации - М.: Пищевая промышленность, 1975 г. – С. 190-191.] Недоліком цього способу є те, що він не достатньо враховує наявність перехресних зв'язків, які здійснюють сильний вплив на динаміку перехідних характеристик. Найбільш сильний вплив спричиняє перехід тепла з першої зони випічки в зону зволоження і другу зону випічки, що викликає низьку динамічну точність системи. В основу корисної моделі поставлено задачу підвищення якості хліба та зниження енергоспоживання шляхом підвищення динамічної точності управління об'єктом. Взагалі задачу управління хлібопекарською піччю можна поділити на декілька окремих задач. Загальним завданням управління в даному випадку є отримання хліба з заданими властивостями (певною пористістю, вологістю, температурою, формою, масою і т.д.). Розбивши даний процес на складові можна визначити наступні завдання: 1. Якість отриманого хліба більшою мірою залежить від його температури і вологості. Тому завдання регулювання буде складатися у виділенні каналів регулювання якості хліба: - За рахунок зміни витрати пари регулювати масу, форму хліба; - Змінюючи кількість продуктів згоряння, регулювати вологість, пористість, зовнішній вигляд хліба та ін. 2. Завдання адаптації полягає в настроюванні властивостей керуючого пристрою в системах автоматичного управління при зміні властивостей об'єкта управління в процесі його роботи. 3. Оптимальний режим роботи забезпечується при правильному використанні пари і газу, дотриманні необхідної якості цих продуктів. Поставлена задача вирішується в запропонованому способі автоматичного управління процесом випічки хліба, що включає вимір вологості в зоні зволоження і температур в зоні зволоження, першій та другій зоні випічки, порівняння їх з заданими значеннями, регулювання температур шляхом регулювання подачі продуктів згорання в зону зволоження, першу та другу зону випічки і вологості, шляхом регулювання подачі пари в зону зволоження, за рахунок зміни положення регулюючих органів, додаванням корегуючих зв'язків, які компенсують вплив перехресних зв'язків в об'єкті. Корегуючі зв'язки реалізуються передаточними функціями: к Wи зу Мзу (р) к Wи Т (р) г зу o W21(p) o W11(p) ; o W32 (p) o W22 (p) ; к Wи Тзв 2 (р) г 50 o W34 (p) o W44 (p) , (1) де: o W11(p) - передатна функція ОУ за каналом "Uп-Мзу"; o W21(p) - передатна функція перехресного каналу "Uзу-Мзу"; 1 UA 79307 U o W22 (p) - передатна функція ОУ за каналом "Uг-Тзв1"; o W32 (p) - передатна функція перехресного каналу "Uг-Тзу"; o W44 (p) - передатна функція ОУ за каналом "Uзв2-Тзв2"; 5 10 o W34 (p) - передатна функція перехресного каналу "Uг-Тзв2". Введення корегуючих зв'язків забезпечує автономність контурів регулювання один від одного. На кресленні приведена структурна схема запропонованого способу управління, який реалізується наступним чином: 1) Канал "Uп-Мзу". зд Задане значення вологості в зоні зволоження Мзу надходить в суматор 1, де в результаті віднімання поточного значення цього параметру Мзу вираховується похибка регулювання Мзу. Після цього сигнал надходить до регулятора 2, який формує управляючу дію відповідно до залежності: p Uп(t) W1 (p) (Mзд Мзу ) зу 15 20 , (2) p W1 (p) де: - передатна функція регулятора 2. На практиці найбільш часто використовують загально відомий пропорційно-інтегральнодиференціальній (ПІД) закон регулювання, передатна функція якого: Тпр р 1 W p (p) kp (1 ) Tиз р 0,2 Тпр р , (3) де: kp - коефіцієнт передачі регулятора; Tиз - час ізодрому; Тпр 25 - час упередження. На управляючу дію, через суматор 3, складаються неконтрольовані збурення fн 1 і корегуючий зв'язок 5, який компенсує вплив каналу "Uзу-Тзу" на "Uп-Мзу". Далі сигнал проходить через об'єкт управління 4 за каналом "Uп-Мзу" та на виході отримуємо поточне значення змінної Мзу. Як модель об'єкта прийнята модель: W o (p) ko T op 1 e p , (4) де: 30 35 k o - коефіцієнт передачі об'єкта управління; T o - постійна часу об'єкта управління; - час запізнення. 2) Канал "Uзу-Тзу". зд Задане значення температури зони зволоження Тзу надходить в суматор 6, де в результаті віднімання поточного значення цього параметру Тзу вираховується похибка регулювання Тзу. Після цього сигнал надходить до регулятора 7, який формує управляючу дію відповідно до залежності: p зд Uзу (t) W2 (p) (Tзу Тзу ) , (5) де: 40 45 p W2 (p) - передатна функція регулятора 7; Проходячи через корегуючий зв'язок 5, сигнал надає компенсуючий вплив на Uп, а також, через суматор 8, де Uзу складається з неконтрольованими збуреннями fн2 і корегуючим зв'язком 9, який компенсує вплив каналу "Uг-Тзв1" на "Uзу-Тзу". Далі проходить через об'єкт управління 4 за каналом "Uзу-Тзу", водночас, впливаючи на канал "Uп-Мзу", створюючи перехресний зв'язок "Uзу-Мзу". На виході об'єкта управління за каналом "Uзу-Тзу" отримуємо поточне значення змінної Тзу. 3) Канал "Uг-Тзв". 2 UA 79307 U зд Задане значення температури першої зони випічки Тзв1 надходить в суматор 10, де в результаті віднімання поточного значення цього параметру Тзв1 вираховується похибка регулювання Тзв1. Після цього сигнал надходить до регулятора 11, який формує управляючу дію відповідно до залежності: 5 p зд Uзв 1(t) W3 (p) (Tзв Т зв ) , (6) p 10 15 де: W3 (p) - передатна функція регулятора 11. Проходячи через корегуючий зв'язок 9 і 13, сигнал надає компенсуючі впливи на Uзу і Uзв2 відповідно. Далі сигнал проходить через суматор 12, де Uг складається з неконтрольованими збуреннями fн3 та проходить через об'єкт управління 4 по каналу "Ur-Тзв1", водночас, впливаючи на канал "Uзу-Тзу" i "Uзв2-Тзв2", створюючи перехресний зв'язок "Uг-Тзу" і "Uг-Tзв2" відповідно. На виході об'єкта управління за каналом "Uг-Тзв1" отримуємо поточне значення змінної Тзв1. 4) Канал "Uзв2-Тзв2". зд Задане значення температури в другій зоні випічки Тзв2 надходить в суматор 14, де в результаті віднімання поточного значення цього параметру Тзв2 вираховується похибка регулювання Тзв2. Після цього сигнал надходить до регулятора 15, який формує управляючу дію відповідно до залежності: p зд U зв 2( t) W4 (p) (Tзв 2 Т зв 2 ) , (7) p 20 25 де: W4 (p) - передатна функція регулятора 4. До управляючої дії, через суматор 16, складаються неконтрольовані збурення fн4 і корегуючий зв'язок 13, який компенсує вплив каналу "Uг-Тзв1" на "Uзв2-Тзв2". Далі сигнал проходить через об'єкт управління 4 за каналом "Uзв2-Тзв2" та на виході отримуємо поточне значення змінної Тзв2. ФОРМУЛА КОРИСНОЇ МОДЕЛІ Спосіб автоматичного управління процесом випічки хліба, що включає вимір вологості в зоні зволоження і температур в зоні зволоження, першій та другій зоні випічки, порівняння їх з заданими значеннями, регулювання температур шляхом регулювання подачі продуктів згорання в зону зволоження, першу та другу зону випічки і вологості, шляхом регулювання подачі пари в зону зволоження, за рахунок зміни положення регулюючих органів, який відрізняється тим, що для компенсації перехресних зв'язків, які впливають на сусідні канали, вводять корегуючі зв'язки, які забезпечують автономність контурів регулювання один від одного. 3 UA 79307 U Комп’ютерна верстка І. Мироненко Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 4
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for automatic control of breadmaking process
Автори англійськоюLevinskyi Valerii Mykhailovych, Kyrylov Kostiantyn Olehovych
Назва патенту російськоюСпособ автоматического управления процессом выпечки хлеба
Автори російськоюЛевинский Валерий Михайлович, Кирилов Константин Олегович
МПК / Мітки
МПК: A21B 1/00
Мітки: керування, випічки, процесом, спосіб, автоматичного, хліба
Код посилання
<a href="https://ua.patents.su/6-79307-sposib-avtomatichnogo-keruvannya-procesom-vipichki-khliba.html" target="_blank" rel="follow" title="База патентів України">Спосіб автоматичного керування процесом випічки хліба</a>
Спосіб автоматичного керування процесом випічки хліба
Номер патенту: 34308
Опубліковано: 11.08.2008
Автор: Мітєва Антоніна Василівна
МПК: A21B 1/00
Мітки: хліба, спосіб, керування, автоматичного, процесом, випічки
Формула / Реферат:
Спосіб автоматичного керування випічкою хліба в хлібопекарній печі, що включає регулювання температури в зоні зволоження печі та в зоні випічки, який відрізняється тим, що регулюють вологість в зоні зволоження печі з урахуванням дії коригуючого зв'язку, який забезпечує інваріантність каналу керування відносно зміни тиску пари в магістралі, що підводиться до зони зволоження печі, а також забезпечують інваріантність каналу регулювання...
Спосіб автоматичного керування процесом випічки хліба
Номер патенту: 50471
Опубліковано: 10.06.2010
Автори: Світий Іван Миколайович, Ківалов Юрій Григорович
МПК: A21B 1/00
Мітки: спосіб, автоматичного, випічки, хліба, керування, процесом
Формула / Реферат:
Спосіб автоматичного керування випічкою хліба в хлібопекарній печі, що передбачає регулювання температури в усіх трьох зонах випічки хліба в печі, регулювання температури в кожній зоні печі передбачає інваріантність кожного каналу регулювання температури один від одного, який відрізняється тим, що регулювання температури у другій пекарній камері здійснюють з урахуванням дії коригуючого зв'язку, який забезпечує інваріантність каналу...
Спосіб автоматичного управління процесом випічки хліба
Номер патенту: 75652
Опубліковано: 10.12.2012
Автори: Павлов Артур Іванович, Бабський Олег Витальевич
МПК: A21B 1/00
Мітки: випічки, процесом, управління, хліба, спосіб, автоматичного
Формула / Реферат:
Спосіб автоматичного управління процесом випічки хліба, який включає первинну вологу обробку тістових заготовок за допомогою пари, попередній прогрів тістових заготовок, вимірювання і регулювання температури в окремих зонах печі, вимірювання і регулювання температури толочних газів, вимірювання і регулювання розрідження в топці, який відрізняється тим, що коригують задане значення температури толочних газів пропорційно сумі відхилень...
Спосіб автоматичного керування процесом випічки хлібобулочних виробів
Номер патенту: 72564
Опубліковано: 27.08.2012
Автори: Рябоконь Максим Олександрович, Воінова Світлана Олександрівна, Світий Іван Миколайович
МПК: A21B 1/00
Мітки: випічки, хлібобулочних, процесом, керування, спосіб, автоматичного, виробів
Формула / Реферат:
Спосіб автоматичного керування процесом випічки хлібобулочних виробів, що включає регулювання температури випічки і вологості повітря в пекарній камері, який відрізняється тим, що вводять коректуючі зв'язки, які компенсують взаємний вплив контурів регулювання температури і вологості, чим підвищують динамічну точність системи управління за каналом регулювання та не дозволяють виходити рівню за задані значення.
Спосіб автоматичного управління процесом випічки борошняних виробів
Номер патенту: 52711
Опубліковано: 10.09.2010
Автори: Горпиняк Юрій Миколайович, Хобін Віктор Андрійович
МПК: A21D 8/00
Мітки: автоматичного, спосіб, борошняних, випічки, управління, виробів, процесом
Формула / Реферат:
Спосіб автоматичного управління випічкою борошняних виробів, що передбачає регулювання температури в усіх зонах печі, який відрізняється тим, що величину температури в останній зоні печі коректують безпосередньо під час випічки регулятором кольору поверхні виробу, який порівнює поточний колір поверхні з заданим кольором, і за рахунок коректування температури підтримує колір виробів заданим.
Попередній патент: Спосіб багатофакторного аналізу летальності у постраждалих з поєднаною травмою
Наступний патент: Спосіб автоматичного керування температурою в морозильній камері
Випадковий патент: Спосіб геміколектомії