Спосіб керування приводами маніпуляційної системи промислового робота
Номер патенту: 104215
Опубліковано: 10.01.2014
Автори: Ловейкін Вячеслав Сергійович, Ромасевич Юрій Олександрович


Формула / Реферат
Спосіб керування приводами маніпуляційної системи промислового робота, згідно з яким змінюють швидкості приводів поступального руху ![]() та обертального руху
та обертального руху ![]() робота, причому так, що максимальні значення вказаних швидкостей поступального та обертального руху, відповідно
робота, причому так, що максимальні значення вказаних швидкостей поступального та обертального руху, відповідно ![]() та
та ![]() , не перевищують наперед встановлених значень швидкостей поступального та обертального руху, відповідно
, не перевищують наперед встановлених значень швидкостей поступального та обертального руху, відповідно ![]() та
та ![]() , який відрізняється тим, що зазначені швидкості змінюють за законами, які описуються наступними дискретними функціями часу:
, який відрізняється тим, що зазначені швидкості змінюють за законами, які описуються наступними дискретними функціями часу:
- для приводу поступального руху
![]()
де i - кількість дискретних значень швидкості приводу поступального руху, n - кількість дискретних значень швидкості ![]() Тх - тривалість роботи приводу поступального руху, яка визначається з умови
Тх - тривалість роботи приводу поступального руху, яка визначається з умови ![]() , Dt - крок дискретності задання часу, ti - i-тий момент часу, хпоч та хкін - початкова і кінцева координати приводу поступального руху, які відповідають початковому та кінцевому положенню захватного пристрою у глобальній системі координат;
, Dt - крок дискретності задання часу, ti - i-тий момент часу, хпоч та хкін - початкова і кінцева координати приводу поступального руху, які відповідають початковому та кінцевому положенню захватного пристрою у глобальній системі координат;
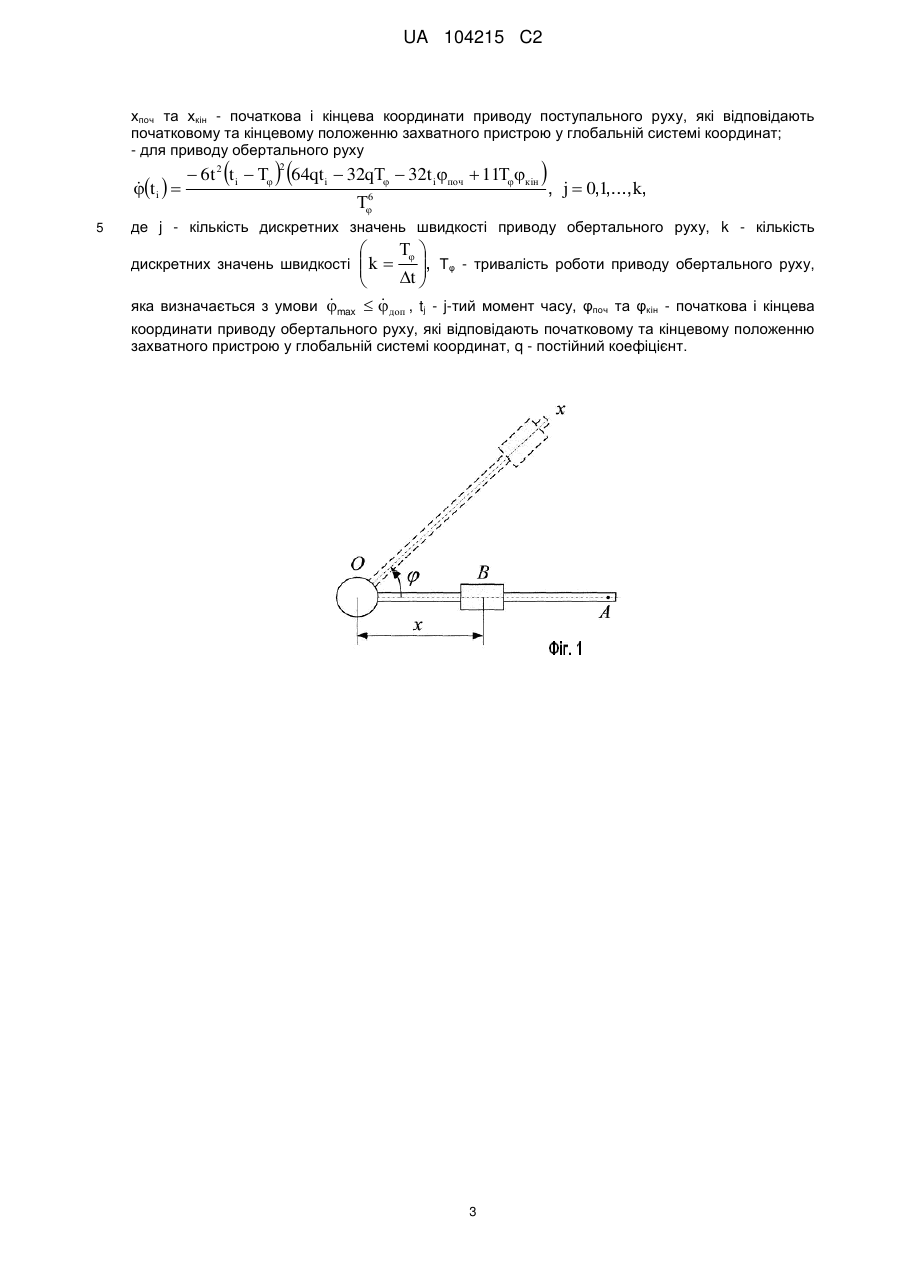
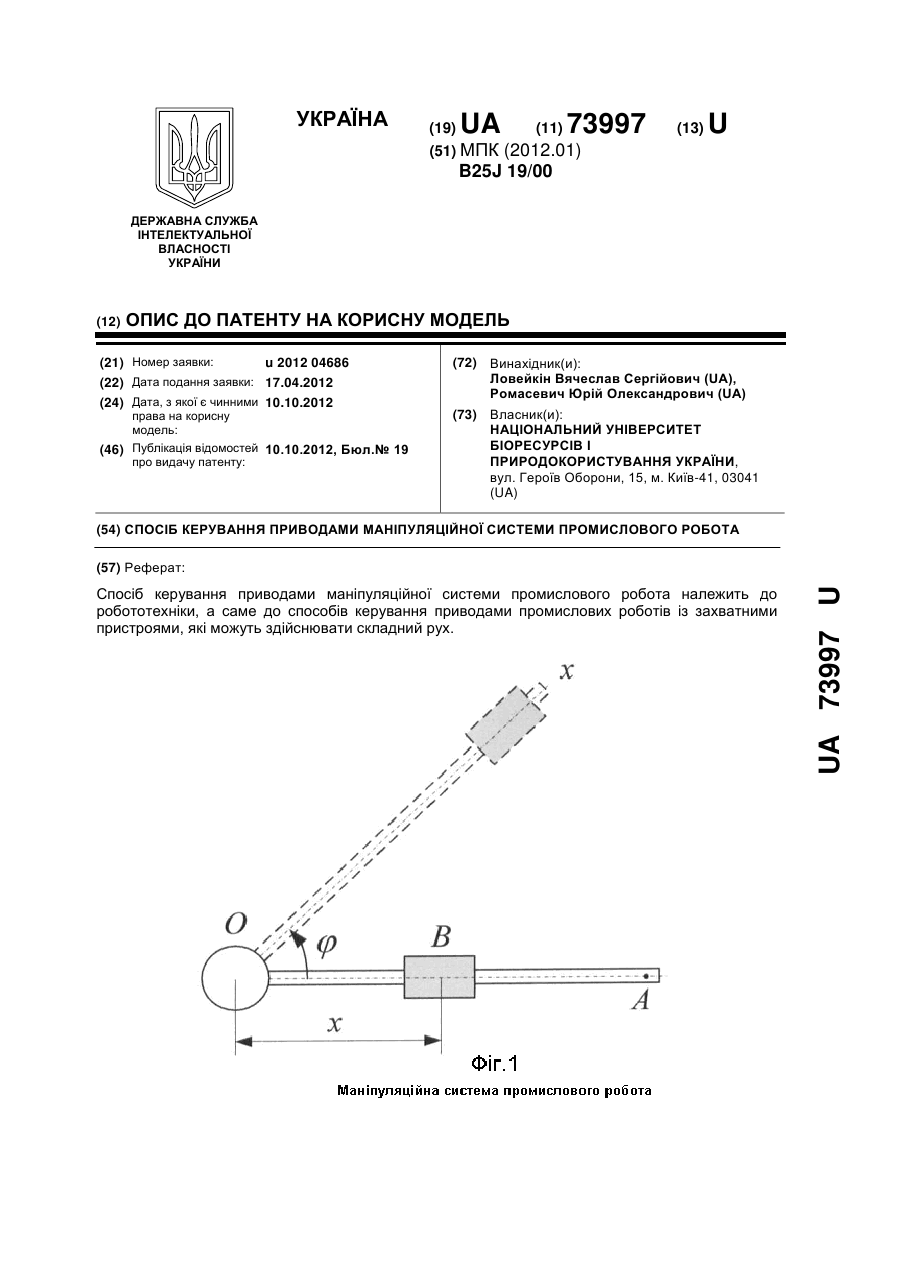
- для приводу обертального руху

де j - кількість дискретних значень швидкості приводу обертального руху, k - кількість дискретних значень швидкості ![]() Τφ - тривалість роботи приводу обертального руху, яка визначається з умови
Τφ - тривалість роботи приводу обертального руху, яка визначається з умови ![]() , tj - j-тий момент часу, φпоч та φкін - початкова і кінцева координати приводу обертального руху, які відповідають початковому та кінцевому положенню захватного пристрою у глобальній системі координат, q - постійний коефіцієнт.
, tj - j-тий момент часу, φпоч та φкін - початкова і кінцева координати приводу обертального руху, які відповідають початковому та кінцевому положенню захватного пристрою у глобальній системі координат, q - постійний коефіцієнт.
Текст
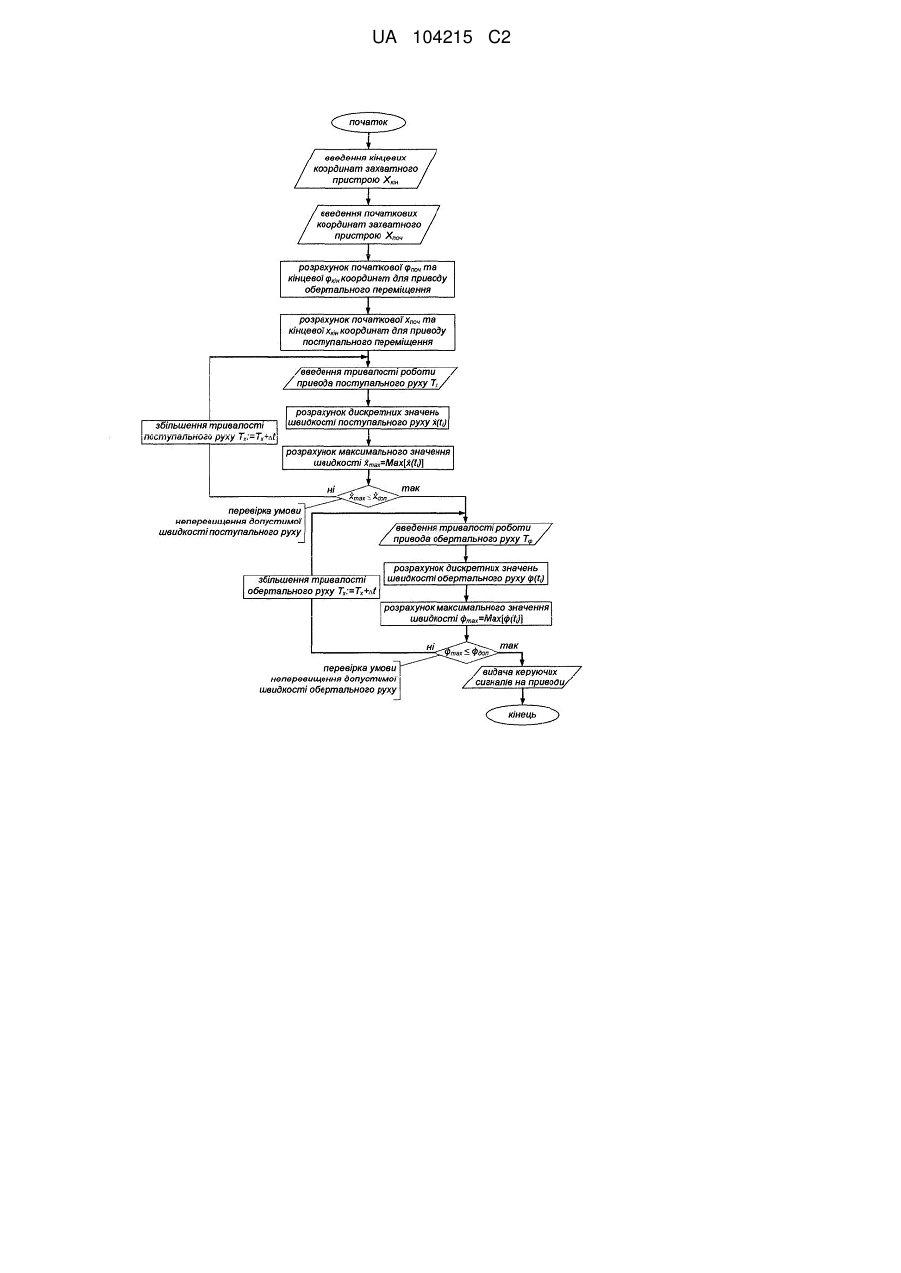
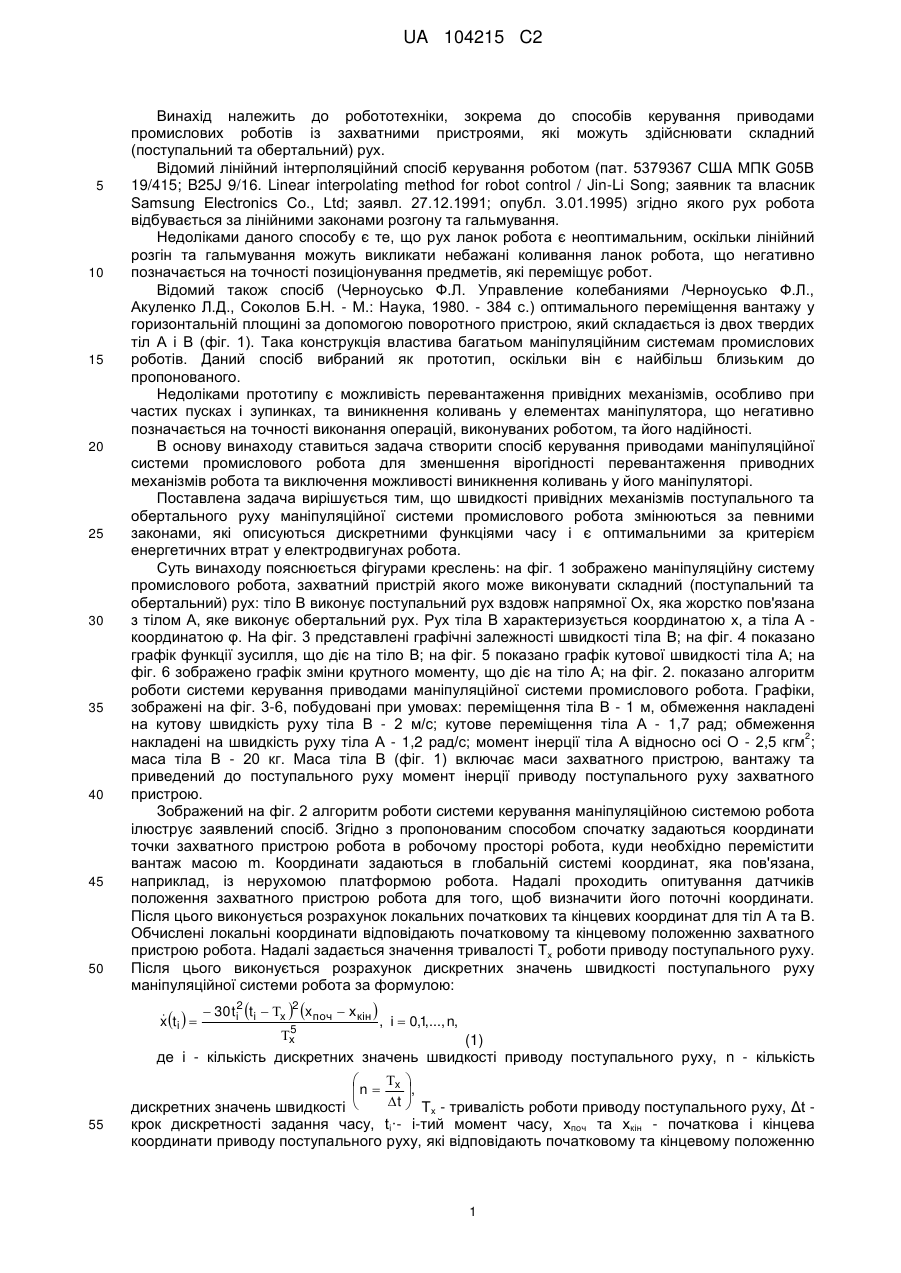
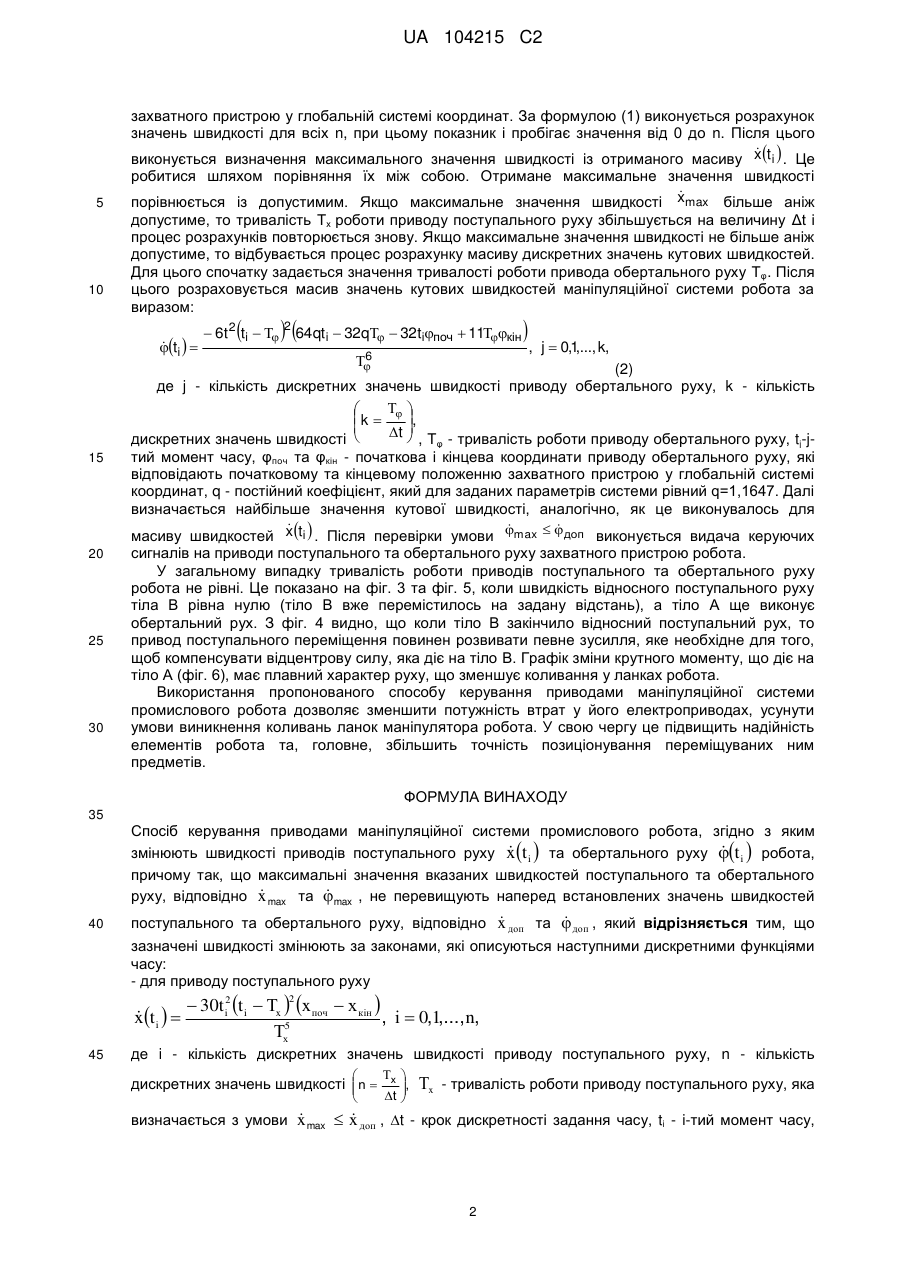
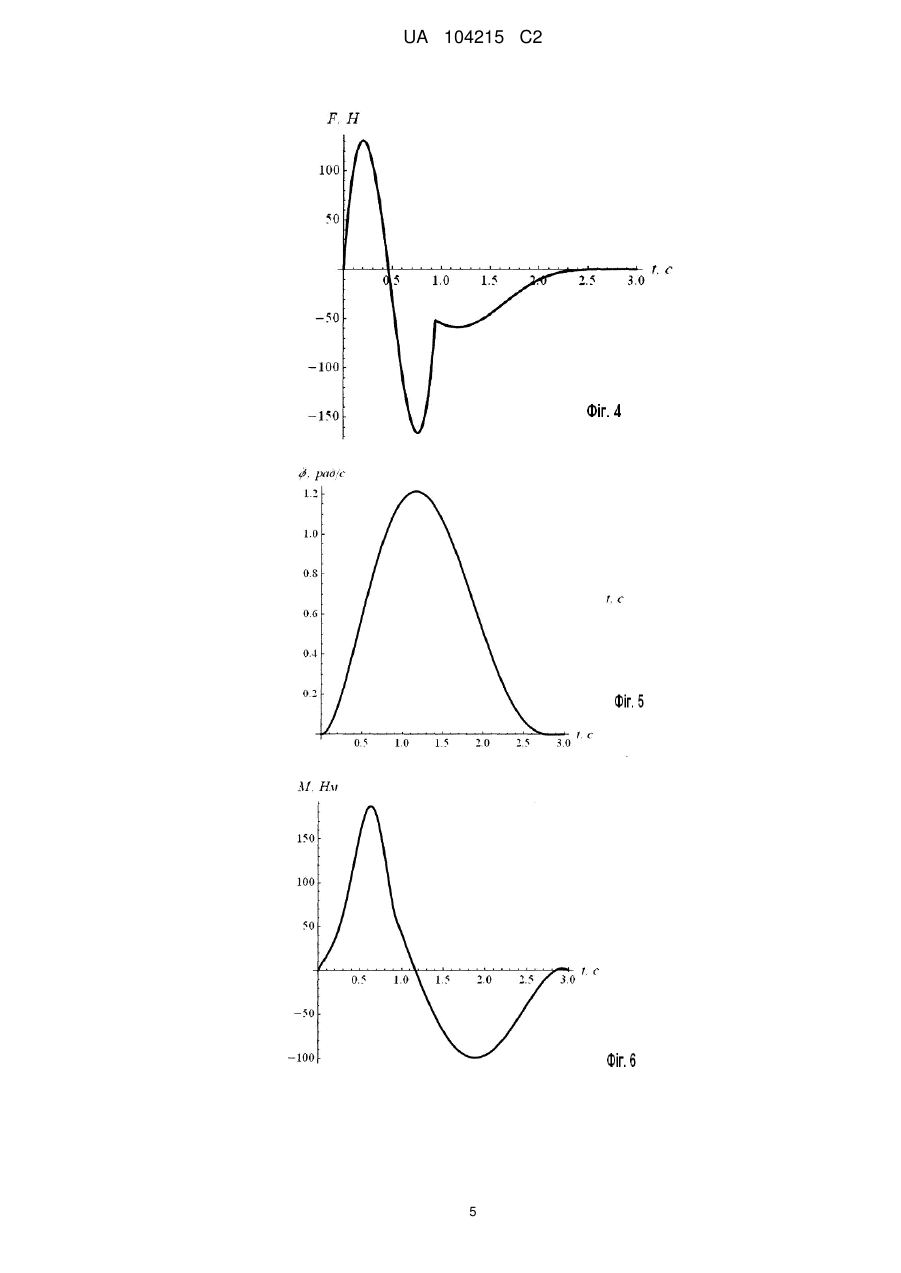
Реферат: Винахід належить до робототехніки. У способі керування приводами маніпуляційної системи промислового робота змінюють швидкості приводів поступального руху і обертального руху робота так, що максимальні значення вказаних швидкостей поступального та обертального руху не перевищують наперед встановлених значень. Зазначені швидкості змінюють за певними оптимальними законами, які описуються наступними дискретними функціями часу. Технічним результатом є зменшення усунення коливань ланок маніпулятора робота, підвищення надійності елементів робота та збільшення точності позиціонування переміщуваних ним предметів. UA 104215 C2 (12) UA 104215 C2 UA 104215 C2 5 10 15 20 25 30 35 40 45 50 Винахід належить до робототехніки, зокрема до способів керування приводами промислових роботів із захватними пристроями, які можуть здійснювати складний (поступальний та обертальний) рух. Відомий лінійний інтерполяційний спосіб керування роботом (пат. 5379367 США МПК G05B 19/415; B25J 9/16. Linear interpolating method for robot control / Jin-Li Song; заявник та власник Samsung Electronics Co., Ltd; заявл. 27.12.1991; опубл. 3.01.1995) згідно якого рух робота відбувається за лінійними законами розгону та гальмування. Недоліками даного способу є те, що рух ланок робота є неоптимальним, оскільки лінійний розгін та гальмування можуть викликати небажані коливання ланок робота, що негативно позначається на точності позиціонування предметів, які переміщує робот. Відомий також спосіб (Черноусько Ф.Л. Управление колебаниями /Черноусько Ф.Л., Акуленко Л.Д., Соколов Б.Н. - М.: Наука, 1980. - 384 с.) оптимального переміщення вантажу у горизонтальній площині за допомогою поворотного пристрою, який складається із двох твердих тіл А і В (фіг. 1). Така конструкція властива багатьом маніпуляційним системам промислових роботів. Даний спосіб вибраний як прототип, оскільки він є найбільш близьким до пропонованого. Недоліками прототипу є можливість перевантаження привідних механізмів, особливо при частих пусках і зупинках, та виникнення коливань у елементах маніпулятора, що негативно позначається на точності виконання операцій, виконуваних роботом, та його надійності. В основу винаходу ставиться задача створити спосіб керування приводами маніпуляційної системи промислового робота для зменшення вірогідності перевантаження приводних механізмів робота та виключення можливості виникнення коливань у його маніпуляторі. Поставлена задача вирішується тим, що швидкості привідних механізмів поступального та обертального руху маніпуляційної системи промислового робота змінюються за певними законами, які описуються дискретними функціями часу і є оптимальними за критерієм енергетичних втрат у електродвигунах робота. Суть винаходу пояснюється фігурами креслень: на фіг. 1 зображено маніпуляційну систему промислового робота, захватний пристрій якого може виконувати складний (поступальний та обертальний) рух: тіло В виконує поступальний рух вздовж напрямної Ох, яка жорстко пов'язана з тілом А, яке виконує обертальний рух. Рух тіла В характеризується координатою х, а тіла А координатою φ. На фіг. 3 представлені графічні залежності швидкості тіла В; на фіг. 4 показано графік функції зусилля, що діє на тіло В; на фіг. 5 показано графік кутової швидкості тіла А; на фіг. 6 зображено графік зміни крутного моменту, що діє на тіло А; на фіг. 2. показано алгоритм роботи системи керування приводами маніпуляційної системи промислового робота. Графіки, зображені на фіг. 3-6, побудовані при умовах: переміщення тіла В - 1 м, обмеження накладені на кутову швидкість руху тіла В - 2 м/с; кутове переміщення тіла А - 1,7 рад; обмеження 2 накладені на швидкість руху тіла А - 1,2 рад/с; момент інерції тіла А відносно осі О - 2,5 кгм ; маса тіла В - 20 кг. Маса тіла В (фіг. 1) включає маси захватного пристрою, вантажу та приведений до поступального руху момент інерції приводу поступального руху захватного пристрою. Зображений на фіг. 2 алгоритм роботи системи керування маніпуляційною системою робота ілюструє заявлений спосіб. Згідно з пропонованим способом спочатку задаються координати точки захватного пристрою робота в робочому просторі робота, куди необхідно перемістити вантаж масою m. Координати задаються в глобальній системі координат, яка пов'язана, наприклад, із нерухомою платформою робота. Надалі проходить опитування датчиків положення захватного пристрою робота для того, щоб визначити його поточні координати. Після цього виконується розрахунок локальних початкових та кінцевих координат для тіл А та В. Обчислені локальні координативідповідають початковому та кінцевому положенню захватного пристрою робота. Надалі задається значення тривалості Тх роботи приводу поступального руху. Після цього виконується розрахунок дискретних значень швидкості поступального руху маніпуляційної системи робота за формулою: 30 ti2 ti x 2 xпоч хкін x ti , і 0,1,..., n, 5 х (1) де i - кількість дискретних значень швидкості приводу поступального руху, n - кількість 55 n x , t Т - тривалість роботи приводу поступального руху, Δt дискретних значень швидкості х крок дискретності задання часу, ti·- i-тий момент часу, хпоч та хкін - початкова і кінцева координати приводу поступального руху, які відповідають початковому та кінцевому положенню 1 UA 104215 C2 5 10 захватного пристрою у глобальній системі координат. За формулою (1) виконується розрахунок значень швидкості для всіх n, при цьому показник i пробігає значення від 0 до n. Після цього виконується визначення максимального значення швидкості із отриманого масиву x t i . Це робитися шляхом порівняння їх між собою. Отримане максимальне значення швидкості порівнюється із допустимим. Якщо максимальне значення швидкості xmax більше аніж допустиме, то тривалість Тх роботи приводу поступального руху збільшується на величину Δt і процес розрахунків повторюється знову. Якщо максимальне значення швидкості не більше аніж допустиме, то відбувається процес розрахунку масиву дискретних значень кутових швидкостей. Для цього спочатку задається значення тривалості роботи привода обертального руху Τφ. Після цього розраховується масив значень кутових швидкостей маніпуляційної системи робота за виразом: ti 15 20 25 30 6t 2 ti 2 64qti 32q 32tiпоч 11кін 6 , j 0,1 k, ,..., (2) де j - кількість дискретних значень швидкості приводу обертального руху, k - кількість k , t , Τ - тривалість роботи приводу обертального руху, t -j дискретних значень швидкості φ j тий момент часу, φпоч та φкін - початкова і кінцева координати приводу обертального руху, які відповідають початковому та кінцевому положенню захватного пристрою у глобальній системі координат, q - постійний коефіцієнт, який для заданих параметрів системи рівний q=1,1647. Далі визначається найбільше значення кутової швидкості, аналогічно, як це виконувалось для масиву швидкостей x ti . Після перевірки умови max доп виконується видача керуючих сигналів на приводи поступального та обертального руху захватного пристрою робота. У загальному випадку тривалість роботи приводів поступального та обертального руху робота не рівні. Це показано на фіг. 3 та фіг. 5, коли швидкість відносного поступального руху тіла В рівна нулю (тіло В вже перемістилось на задану відстань), а тіло А ще виконує обертальний рух. З фіг. 4 видно, що коли тіло В закінчило відносний поступальний рух, то привод поступального переміщення повинен розвивати певне зусилля, яке необхідне для того, щоб компенсувати відцентрову силу, яка діє на тіло В. Графік зміни крутного моменту, що діє на тіло А (фіг. 6), має плавний характер руху, що зменшує коливання у ланках робота. Використання пропонованого способу керування приводами маніпуляційної системи промислового робота дозволяє зменшити потужність втрат у його електроприводах, усунути умови виникнення коливань ланок маніпулятора робота. У свою чергу це підвищить надійність елементів робота та, головне, збільшить точність позиціонування переміщуваних ним предметів. ФОРМУЛА ВИНАХОДУ 35 Спосіб керування приводами маніпуляційної системи промислового робота, згідно з яким змінюють швидкості приводів поступального руху x t i та обертального руху t i робота, причому так, що максимальні значення вказаних швидкостей поступального та обертального руху, відповідно x max та max , не перевищують наперед встановлених значень швидкостей 40 поступального та обертального руху, відповідно x доп та доп , який відрізняється тим, що зазначені швидкості змінюють за законами, які описуються наступними дискретними функціями часу: - для приводу поступального руху 30t i2 t i x x поч х кін xt i , і 0,1,..., n, 5 х 2 45 де i - кількість дискретних значень швидкості приводу поступального руху, n - кількість дискретних значень швидкості n x , t x - тривалість роботи приводу поступального руху, яка визначається з умови x max x доп , t - крок дискретності задання часу, ti - i-тий момент часу, 2 UA 104215 C2 хпоч та хкін - початкова і кінцева координати приводу поступального руху, які відповідають початковому та кінцевому положенню захватного пристрою у глобальній системі координат; - для приводу обертального руху t i 5 6t 2 t i 64qt i 32q 32t iпоч 11кін 2 6 , j 0,1,..., k, де j - кількість дискретних значень швидкості приводу обертального руху, k - кількість k , Τφ - тривалість роботи приводу обертального руху, t яка визначається з умови max доп , tj - j-тий момент часу, φпоч та φкін - початкова і кінцева дискретних значень швидкості координати приводу обертального руху, які відповідають початковому та кінцевому положенню захватного пристрою у глобальній системі координат, q - постійний коефіцієнт. 3 UA 104215 C2 4 UA 104215 C2 5 UA 104215 C2 Комп’ютерна верстка Л. Бурлак Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 6
ДивитисяДодаткова інформація
Автори англійськоюLoveikin Viacheslav Serhiiovych, Romasevych Yurii Oleksandrovych
Автори російськоюЛовейкин Вячеслав Сергеевич, Ромасевич Юрий Александрович
МПК / Мітки
МПК: G05B 19/00, B25J 9/00
Мітки: спосіб, приводами, робота, маніпуляційної, системі, керування, промислового
Код посилання
<a href="https://ua.patents.su/8-104215-sposib-keruvannya-privodami-manipulyacijjno-sistemi-promislovogo-robota.html" target="_blank" rel="follow" title="База патентів України">Спосіб керування приводами маніпуляційної системи промислового робота</a>
Спосіб керування приводами маніпуляційної системи промислового робота
Номер патенту: 73997
Опубліковано: 10.10.2012
Автори: Ловейкін Вячеслав Сергійович, Ромасевич Юрій Олександрович
МПК: B25J 19/00
Мітки: промислового, керування, робота, маніпуляційної, приводами, спосіб, системі
Формула / Реферат:
Спосіб керування приводами маніпуляційної системи промислового робота, що включає зміну швидкостей приводів поступального та обертального руху робота, причому максимальні значення вказаних швидкостей не перевищують наперед встановлених значень, який відрізняється тим, що швидкості привідних механізмів робота змінюють за оптимальними законами, які описують дискретними функціями часу:- для приводу поступального руху
Спосіб керування рухом промислового робота

Номер патенту: 101651
Опубліковано: 25.04.2013
Автори: Ромасевич Юрій Олександрович, Ловейкін Вячеслав Сергійович
МПК: C05B 19/00, B25J 9/00
Мітки: рухом, промислового, робота, спосіб, керування
Формула / Реферат:
Спосіб керування рухом промислового робота, при якому розгін і гальмування ланки робота здійснюють при максимальному приводному моменті, який відрізняється тим, що розгін і гальмування ланки робота здійснюють за наступним дискретним законом, який описується поліноміальною залежністю від аргументу часу
Захватний пристрій промислового робота
Номер патенту: 24280
Опубліковано: 25.06.2007
Автори: Мажара Віталій Анатолійович, Годунко Максим Олегович, Павленко Іван Іванович
МПК: B23B 15/00, B23Q 7/04
Мітки: робота, захватний, промислового, пристрій
Формула / Реферат:
Захватний пристрій промислового робота, який складається з корпусу, кулачків із затискними елементами, що переміщуються в корпусі з'єднаного з ними диска із архімедовою спіраллю, та підпружиненого штовхача, який відрізняється тим, що його устатковано оборотним пневмоциліндром та роликом механізму зміни робочого діапазону затискних елементів.
Двозахватний пристрій промислового робота

Номер патенту: 15774
Опубліковано: 17.07.2006
Автори: Павленко Іван Іванович, Мажара Віталій Анатолійович
МПК: F16S 5/00
Мітки: двозахватний, пристрій, промислового, робота
Формула / Реферат:
1. Двозахватний пристрій промислового робота для одночасного затиску двох деталей, що складається з важелів з губками, вилки та тяги, які приєднані до кронштейна, обертового пневмоциліндра та пневмоциліндра розтиску, який відрізняється тим, що пневмоциліндр розтиску винесений за межі захватного пристрою.2. Двозахватний пристрій промислового робота за п. 1, який відрізняється тим, що розтиск захвату можливий лише в робочій...
Багатофункціональний кистьовий вузол промислового робота
Номер патенту: 24706
Опубліковано: 10.07.2007
Автори: Марковський Ігор Володимирович, Кондратенко Юрій Пантелійович, Чернов Сергій Костянтинович, Шишкін Олександр Сергійович, Кондратенко Володимир Юрійович
МПК: B25J 15/00
Мітки: робота, вузол, промислового, багатофункціональний, кистьовий
Формула / Реферат:
Багатофункціональний кистьовий пристрій промислового робота, що містить дві пари захватних органів, основу, корпус, привід захватних органів, кінематично з'єднаний з гвинтовою парою, та зовнішній і внутрішній порожнинні циліндричні елементи, встановлені коаксіально гвинту гвинтової пари, кожний затискний елемент першої пари захватних органів за допомогою відповідної пари шарнірно закріплених паралельних тяг кінематично зв'язано з гайкою...
Попередній патент: Спосіб дугового зварювання, наплавлення або паяння електродом, що плавиться, та джерело струму для його здійснення
Наступний патент: Пристрій для транспортування і очистки коренебульбоплодів
Випадковий патент: Ложемент для перевезення та зберігання боєприпасів, що підлягають утилізації