Спосіб автоматичного управління аеротенками
Номер патенту: 115162
Опубліковано: 10.04.2017
Автори: Царенко Олександр Миколаєвич, Смирнов Олександр Володимирович, Мешенгіссер Юрій Михайлович, Єсін Михайло Анатолійович

Формула / Реферат
Спосіб автоматичного управління аеротенками, що включає подачу в працюючі аеротенки стічних вод через датчик витрати стічних вод і через регулятори з виконавчими механізмами, подачу в аеротенки зворотного мулу через регулятори з виконавчими механізмами і повітря від повітродувок, який відрізняється тим, що стічні води подають в аеротенки через датчики виміру окислювально-відновлювального потенціалу (ОВП) припливу стічних вод, порівнянням ОВП мулової суміші в аеротенку, де встановлений датчик виміру ОВП, причому автоматичне управління аеротенками здійснюють через логічний програмувальний блок із установленою математичною моделлю процесу біологічного очищення стічних вод від з'єднань фосфору, причому необхідну кількість зворотного мулу і повітря подають в аеротенки по встановленій у логічному програмувальному блоці розрахункової моделі з урахуванням ступеня зміни ОВП припливу стічних вод при змішуванні.
Текст
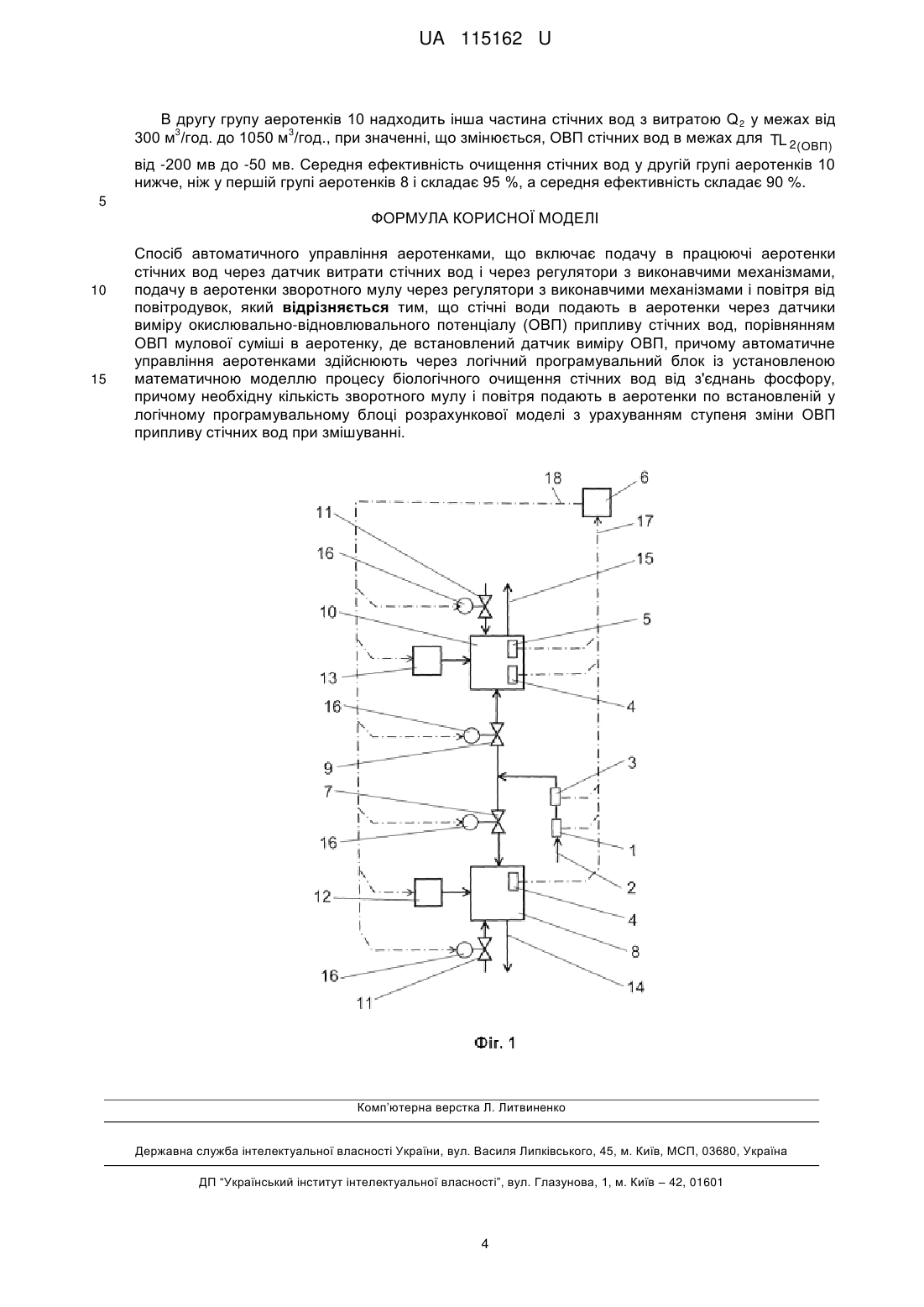
Реферат: Спосіб автоматичного управління аеротенками включає подачу в працюючі аеротенки стічних вод через датчик витрати стічних вод і через регулятори з виконавчими механізмами, подачу в аеротенки зворотного мулу через регулятори з виконавчими механізмами і повітря від повітродувок. Стічні води подають в аеротенки через датчики виміру окислювальновідновлювального потенціалу (ОВП) припливу стічних вод, порівнянням ОВП мулової суміші в аеротенку, де встановлений датчик виміру ОВП. Автоматичне управління аеротенками здійснюють через логічний програмувальний блок із установленою математичною моделлю процесу біологічного очищення стічних вод від з'єднань фосфору. Необхідну кількість зворотного мулу і повітря подають в аеротенки по встановленій у логічному програмувальному блоці розрахункової моделі з урахуванням ступеня зміни ОВП припливу стічних вод при змішуванні. UA 115162 U (54) СПОСІБ АВТОМАТИЧНОГО УПРАВЛІННЯ АЕРОТЕНКАМИ UA 115162 U UA 115162 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до керування аеротенками очисних споруджень і може знайти використання в області очищення каналізаційних побутових і промислових стічних вод. Відомий спосіб автоматичного керування аеротенками, що включає подачу стічних вод у паралельно працюючі аеротенки через датчик витрати стічних вод і через регулятори з виконавчими механізмами, подачу в аеротенки поворотного мулу через регулятори з виконавчими механізмами і повітря від повітродувок (див. опис винаходу до патенту № 2057723 Російської Федерації, C02F3/02, опубл. 10.04.1996). Відомий пристрій автоматичного управління аеротенками, що містить датчик витрати стічних вод, виконавчі механізми з регуляторами подачі стічних вод в аеротенки, датчики кількості розчиненого кисню, повітродувки, виконавчі механізми з регуляторами подачі зворотного мулу в аеротенки, логічний блок, входи якого зв'язані з датчиком витрати стічних вод і датчиками кількості розчиненого кисню, а виходи - з повітродувками і виконавчими механізмами регуляторів подачі зворотного мулу в аеротенки (див. опис винаходу до авторського посвідчення № 724453, С02С1/02, опубл. 30.03.80. Бюл. № 12). Недоліком відомого способу і пристрою є те, що він не враховує процес біологічного видалення з'єднань фосфору, що призводить до зниження ефективності очищення стічних вод від забруднюючих речовин у цілому на виході з вторинних відстійників. Крім того, показання датчиків кількості розчиненого кисню є непрямими технологічними показниками, без зв'язку з якістю аеробного біологічного очищення. Задачею корисної моделі є підвищення ефективності аеробного й аеробно-анаеробного біологічного очищення стічних вод, поліпшення якості очищених стічних вод, підвищення надійності процесу роботи очисних споруд при біологічному очищенні стічних вод від з'єднань фосфору. Поставлена задача вирішується тим, що спосіб автоматичного управління аеротенками, що включає подачу в працюючі аеротенки стічних вод через датчик витрати стічних вод і через регулятори з виконавчими механізмами, подачу в аеротенки зворотного мулу через регулятори з виконавчими механізмами і повітря від повітродувок, який відрізняється тим, що стічні води подають в аеротенку через датчики виміру окислювально-відновлювального потенціалу (ОВП) припливу стічних вод, порівнянням ОВП мулової суміші в аеротенку, де встановлений датчик виміру ОВП, причому автоматичне управління аеротенками здійснюють через логічний програмувальний блок із установленою математичною моделлю процесу біологічного очищення стічних вод від з'єднань фосфору, причому необхідні кількості зворотного мулу і повітря подають в аеротенки по встановленій у логічному програмувальному блоці розрахункової моделі з урахуванням ступеня зміни ОВП припливу стічних вод при змішуванні. Поставлена задача вирішується також тим, що пристрій автоматичного управління аеротенками, що містить датчик витрати стічних вод, виконавчі механізми з регуляторами подачі стічних вод в аеротенки, датчики ОВП, повітродувки, виконавчі механізми з регуляторами подачі зворотного мулу в аеротенки, логічний блок, входи якого зв'язані з датчиком витрати стічних вод, датчиками виміру ОВП, а виходи логічного блока зв'язані з повітродувками і виконавчими механізмами регуляторів подачі поворотного мулу і стічних вод в аеротенки, який відрізняється тим, що містить датчики кількості зворотного мулу, датчики виміру ОВП, виходи яких зв'язані з відповідними входами логічного блока, що виконаний програмувальним із установленою математичною моделлю процесу біологічного очищення стічних вод від з'єднань фосфору. У групі аеротенків, у процесі подачі стічної води і змішання з поворотним активним мулом автоматично підтримують значення ОВП, що досягається шляхом зміни витрати повітря від повітродувок, дози мулу через управляючий механізм, кількості стічних вод через управляючий механізм, що сприятливо впливає на процес біологічного очищення стічних вод від з'єднань фосфору. Перерозподіл витрати стічних вод між групами аеротенків здійснюється автоматично за допомогою регуляторів витрати стічних вод по команді від програмувального логічного блока у функції від результатів виміру датчиком витрати стічних вод і групою датчиків виміру ОВП стічних вод. Під датчиками виміру ОВП стічних вод маються на увазі датчики, що працюють у безперервному режимі і вимірюють окислювально-відновлювальні потенціали (мв). Фіг. 1. Блок-схема, що пояснює пропонований спосіб і пристрій автоматичного управління аеротенками. Перелік позначень на схемі: 1 - датчик витрати стічних вод; 2 - приплив стічних вод; 3 - датчики виміру ОВП стічних вод; 1 UA 115162 U 5 10 15 20 25 30 35 40 45 50 55 4 - датчики виміру ОВП мулової суміші; 5 - датчики кількості мулу; 6 - логічний програмувальний блок; 7 - регулятор подачі стічних вод; 8 - перша група аеротенків; 9 - регулятор подачі стічних вод; 10 - друга група аеротенків; 11 - регулятор подачі зворотного активного мулу; 12 - повітродувки; 13 - повітродувки; 14 - вихід суміші стічних вод і мулу з першої групи аеротенків 8; 15 - вихід суміші стічних вод і мулу з другої групи аеротенків 10; 16 - виконавчий механізм; 17 - входи логічного програмувального блока 6; 18 - виходи логічного програмувального блока 6. Схема пристрою автоматичного управління аеротенками містить: датчик 1 витрати стічних вод, приплив 2 стічних вод, датчики 3 виміри ОВП стічних вод, датчики 4 значення ОВП мулової суміші і датчики 5 кількості мулу, логічний програмувальний блок 6, регулятор 7 подачі стічних вод на першу групу аеротенків 8, регулятор 9 подачі стічних вод на другу групу аеротенків 10, регулятор 11 подачі зворотного активного мулу, повітродувки 12, 13, вихід 14 суміші стічних вод і мулу з першої групи аеротенків 8, вихід 15 суміші стічних вод і мулу з другої групи аеротенків 10, виконавчі механізми 16 регуляторів 7, 9, 11, входи 17 і виходи 18 логічного програмувального блока 6, виходи датчиків 1, 3, 4, 5 з'єднані з відповідними входами 17 логічного програмувального блока 6, що відповідають виходам 18 логічного програмувального блока 6, що з'єднані з відповідними входами виконавчих механізмів 16 регуляторів 7, 9 подачі стічних вод, регуляторів 11 подачі зворотного активного мулу, а також 3 повітродувками 12, 13. Під датчиками 3 виміру ступеня забруднення стічних вод маються на увазі датчики 3, що працюють у безперервному режимі і вимірюють ОВП стічної води, що надходить на очисні споруди. Відповідно до способу автоматичного управління аеротенками, у паралельно працюючі аеротенки 8, 10 подають стічні води через датчик 1 витрати стічних вод і далі через регулятори 7, 9 з виконавчими механізмами 16, подачу в аеротенки 8, 10 зворотного мулу через регулятори 11 з виконавчими механізмами 16 і повітря від повітродувок 12, 13. Стічні води подають в аеротенки через датчики 3 виміру ОВП припливу 2 стічних вод, розділяють витрату стічних вод в аеротенках 8, 10 на дві групи, де в одній із двох груп аеротенків 8, 10, наприклад, першій групі аеротенків 8 підтримують постійне значення ОВП, причому автоматичне управління аеротенками здійснюють через логічний програмувальний блок 6 із установленою математичною моделлю роботи очисних споруджень і процесу аеробного і анаеробноаеробного біологічного очищення стічних вод, причому необхідні кількості зворотного мулу, стічної води і повітря подають в аеротенки 8, 10 по встановленій у логічному програмувальному блоці 6 розрахункової моделі з урахуванням значення ОВП припливу 2 стічних вод. Пристрій автоматичного управління аеротенками містить датчик 1 витрати стічних вод, виконавчі механізми 16 з регуляторами 7, 9 подачі стічних вод в аеротенки 8, 10, датчики 4 значення ОВП, повітродувки 12, 13, виконавчі механізми 16 з регуляторами 11 подачі зворотного мулу в аеротенки 8, 10, логічний блок 6, входи 17 якого зв'язані з датчиком 1 витрати стічних вод і датчиками 4 значення ОВП, а виходи 18 - сполучені з повітродувками 12, 13 і виконавчими механізмами 16 регуляторів 11 подачі зворотного мулу в аеротенки 8, 10, датчики 5 кількості поворотного мулу, датчики 3 виміру ОВП стічних вод, виходи яких зв'язані з відповідними входами 17 логічного блока 6, що виконаний програмувальним із установленою математичною моделлю роботи очисних споруд і процесу аеробного біологічного очищення стічних вод від з'єднань фосфору. Пристрій автоматичного управління аеротенками працює в такий спосіб. Витрата стічних вод розділяють на дві автономні групи аеротенків 8, 10. Сигнали від датчика 1 витрати стічних вод і датчиків 3 виміру ОВП стічних вод надходять на відповідні входи логічного програмувального блока 6. Логічний програмувальний блок 6 порівнює поточне значення ОВП із заданим значенням для першої групи аеротенків 8 і подає сигнал на регулятор 7 витрати стічних вод, що забезпечує постійне значення ОВП у групі аеротенків. Інша частина витрати стічних вод через регулятор 9 надходить на другу групу аеротенків 10 відповідно до формули: 2 UA 115162 U TL 2 TL TL 1 Q k Q1 k1 const 5 10 15 20 25 30 35 40 45 50 55 де TL - значення ОВП припливу 2 стічних вод на очисні спорудження, TL 1 і TL 2 - відповідні значення ОВП стічних вод на першу групу аеротенків 8 і другу групу аеротенків 10 відповідно, Q і Q1 - витрата стічних вод, загальна для очисних споруджень і для першої групи аеротенків 8 відповідно, k і k 1 - коефіцієнти розподілу витрати загальні для очисних споруд і для першої групи споруд 8 відповідно. Потім величина TL 1 , що є постійною, порівнюється з величиною TL і на підставі отриманої різниці подається сигнал управління на регулятор 7 витрати стічних вод. Управління технологічним процесом здійснюється логічним програмувальним блоком 6, згідно з установленою математичною моделлю роботи очисних споруд і процесу аеробного й анаеробно-аеробного біологічного очищення стічних вод, що включає анаеробно-аеробне і/або аеробне біологічне очищення стічних вод активним мулом в аеротенках 8, відстоювання суміші стічної води й активного мулу у вторинних відстійниках, подачу зворотного активного мулу в аеротенки 8 для участі в біохімічному процесі окислювання, відвід зворотного активного мулу з вторинних відстійників і відвід очищених стічних вод з очисних споруд. Математична модель, встановлена в логічний програмувальний блок 6 являє собою модель роботи активного мулу, наприклад, ASM (active sludge model). Модель калібрується і набудовується з огляду на специфіку стічних вод очисних споруджень у кожнім конкретному випадку, але математичні залежності моделі залишаються постійними. На виході логічного програмувального блока 6 утворюються сигнали, що управляють роботою повітродувок 12, 13, регуляторами 7, 9 витрати стічних вод, що подаються в аеротенки 8, 10, регуляторами 11 кількості зворотного мулу, що подається в аеротенки 8, 10. Продуктивність повітродувок 12, 13 визначається в залежності від сигналу датчика 4 значення ОВП мулової суміші, з корекцією по сигналах датчика 1 витрати стічних вод і датчиків 3 що вимірюють ОВП стічних вод. Так само визначається і виробляється регулювання подачі зворотного активного мулу регуляторами 11 подачі зворотного мулу і відводу надлишкового мулу з вторинних відстійників (на схемі не показані). Кількість подаваного повітря для першої групи аеротенків 8 повітродувками 12 завжди є величиною постійною. Кількість повітря, що подається до другої групи аеротенків 10 повітродувками 13 є величиною змінюваною і визначається логічним програмувальним блоком 6 із установленою математичною моделлю роботи очисних споруджень і процесу аеробного біологічного очищення стічних вод, що включає аеробне біологічне очищення стічної води активним мулом в аеротенках 10, відстоювання суміші стічної води і зворотного активного мулу у вторинних відстійниках, подачу зворотного активного мулу в аеротенки 10 для участі в біохімічному процесі окислювання, відвід надлишкового активного мулу з вторинного відстійника і відвід очищених стічних вод з очисних споруд. Кількість активного мулу в аеротенках 8, 10 установлюється відповідно до показань датчиків 5 кількості мулу регуляторами 11 кількості зворотного мулу, що подається по сигналу від логічного програмувального блока 6. В другу групу аеротенків 10 подають надлишок витрати припливу стічних вод, де величина годинного навантаження за значенням ОВП стічної води може змінюватися по різниці між максимальними і мінімальними годинними значеннями. Процес аеробного біологічного очищення стічних вод у другій групі аеротенків 10 можливо здійснювати, наприклад, на реакторі періодичної дії (на кресленні не показаний). При цьому добові коливання ОВП стічної води і добові зміни ОВП стічних вод впливають на режим роботи тільки меншої частини стічних вод, що в сумі, при злитті очищених стічних вод на виході очисних споруд, підвищує ефективність очищення стічних вод від фосфатів і поліпшує якість очищених стічних вод, підвищує стабільність і надійність роботи очисних споруд. З 3 Наприклад, стічні води з витратою, що змінюється, Q від 1500 м /год. до 1800 м /год. і різним значенням С (овп) в у межах від -200 мв до -50 мв надходять на очисні споруди, де витрата Q стічних вод розділяється автоматично за допомогою регуляторів 7, 9 при управлінні програмувальним логічним блоком на дві групи аеротенків 8, 10, де в першій групі аеротенків 8 3 3 витрата Q1 може змінюватися від 750 м /год. до 1200 м /год., а питоме навантаження TL 1(ОВП) у першій групі аеротенків 8 підтримуються постійною завбільшки -100 мв, при цьому середня ефективність Э(Р-РО4) очищення стічних вод від фосфору в першій групі аеротенків 8 постійно висока, що складає 98 %, а середня ефективність - 95 %. 3 UA 115162 U В другу групу аеротенків 10 надходить інша частина стічних вод з витратою Q 2 у межах від 3 3 300 м /год. до 1050 м /год., при значенні, що змінюється, ОВП стічних вод в межах для TL 2( ОВП) від -200 мв до -50 мв. Середня ефективність очищення стічних вод у другій групі аеротенків 10 нижче, ніж у першій групі аеротенків 8 і складає 95 %, а середня ефективність складає 90 %. 5 ФОРМУЛА КОРИСНОЇ МОДЕЛІ 10 15 Спосіб автоматичного управління аеротенками, що включає подачу в працюючі аеротенки стічних вод через датчик витрати стічних вод і через регулятори з виконавчими механізмами, подачу в аеротенки зворотного мулу через регулятори з виконавчими механізмами і повітря від повітродувок, який відрізняється тим, що стічні води подають в аеротенки через датчики виміру окислювально-відновлювального потенціалу (ОВП) припливу стічних вод, порівнянням ОВП мулової суміші в аеротенку, де встановлений датчик виміру ОВП, причому автоматичне управління аеротенками здійснюють через логічний програмувальний блок із установленою математичною моделлю процесу біологічного очищення стічних вод від з'єднань фосфору, причому необхідну кількість зворотного мулу і повітря подають в аеротенки по встановленій у логічному програмувальному блоці розрахункової моделі з урахуванням ступеня зміни ОВП припливу стічних вод при змішуванні. Комп’ютерна верстка Л. Литвиненко Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 4
ДивитисяДодаткова інформація
МПК / Мітки
МПК: C02F 3/02
Мітки: автоматичного, аеротенками, управління, спосіб
Код посилання
<a href="https://ua.patents.su/6-115162-sposib-avtomatichnogo-upravlinnya-aerotenkami.html" target="_blank" rel="follow" title="База патентів України">Спосіб автоматичного управління аеротенками</a>
Спосіб і пристрій автоматичного керування аеротенками
Номер патенту: 102316
Опубліковано: 25.06.2013
Автори: Колеснік Юрій Васильович, Мешенгіссер Юрій Михайлович, Смирнов Олександр Володимирович, Верютін Сергій Вячеславович
МПК: C02F 3/14
Мітки: спосіб, автоматичного, керування, пристрій, аеротенками
Формула / Реферат:
1. Спосіб автоматичного керування аеротенками, що включає подачу в паралельно працюючі аеротенки стічних вод через датчик витрати стічних вод і через регулятори з виконавчими механізмами, подачу в аеротенки зворотного мулу через регулятори з виконавчими механізмами і повітря від повітродувок, який відрізняється тим, що стічні води подають в аеротенки через датчики виміру ступеня забруднення припливу стічних вод, розділяють витрату стічних...
Спосіб автоматичного управління піччю для виробництва хлібопекарних та кондитерських виробів
Номер патенту: 62992
Опубліковано: 26.09.2011
Автори: Миронова Олександра Віталіївна, Світий Іван Миколайович
МПК: A21B 1/00
Мітки: автоматичного, хлібопекарних, спосіб, піччю, виробництва, управління, кондитерських, виробів
Формула / Реферат:
Спосіб автоматичного управління піччю для виробництва хлібопекарських та кондитерських виробів, який передбачає регулювання температури в печі, який відрізняється тим, що додатково забезпечують регулювання температури готового продукту, витрати пари та розрідження в топці, компенсування контрольованих збурень за рахунок введення каскадної системи автоматичного регулювання.
Система автоматичного управління процесом електрохімічної очистки стічних вод
Номер патенту: 77683
Опубліковано: 25.02.2013
Автори: Смирнова Ірина Володимирівна, Ткачов Роман Юрійович, Пепенін Разумнік Разумнікович, Литвинов Олександр Іванович
МПК: G05D 27/02, C02F 1/461
Мітки: процесом, електрохімічної, система, автоматичного, вод, управління, стічних, очистки
Формула / Реферат:
Система автоматичного управління процесом електрохімічної очистки стічних вод шляхом регулювання густини струму на електродах в залежності від концентрації забруднюючих речовин в стічній воді та зміни полярності електродів, яка відрізняється тим, що додатково регулює частоту зміни полярності в залежності від величини напруги на електродах електролізера.
Спосіб автоматичного управління жароварочною шафою для варки паштету
Номер патенту: 62993
Опубліковано: 26.09.2011
Автори: Воінова Світлана Олександрівна, Самотько Віталій Анатолійович
МПК: A23L 1/31
Мітки: паштету, жароварочною, автоматичного, варки, спосіб, шафою, управління
Формула / Реферат:
Спосіб автоматичного управління жароварочною шафою для варки паштету, що включає вимірювання та регулювання температури в жароварочній шафі шляхом зміни витрати гріючої пари через калорифер, вимірювання та регулювання відносної вологості в жароварочній шафі зміною витрати гріючої пари прямої подачі через форсунку, вимірювання тиску гріючої пари та ступеня відкриття клапана прямої подачі пари на форсунку, коректування заданого значення...
Спосіб автоматичного управління процесом пастеризації молока у пастеризаційно-охолоджувальній установці
Номер патенту: 72479
Опубліковано: 27.08.2012
Автори: Корецький Вадим Васильович, Світий Іван Миколайович
МПК: A23C 3/00
Мітки: молока, пастеризаційно-охолоджувальній, процесом, автоматичного, управління, спосіб, пастеризації, установці
Формула / Реферат:
Спосіб автоматичного управління процесом пастеризації молока у пастеризаційно-охолоджувальній установці, який включає регулювання температури пастеризації та регулювання температури охолодження молока, який відрізняється тим, що використовують регулювання температури пастеризації молока за допомогою каскадної структури, яка компенсує запізнення у проміжній точці пастеризаційно-охолоджувальної установки, коректує задане значення температури...
Попередній патент: Ручний пристрій для плавання у воді
Наступний патент: Втулка блока циліндрів
Випадковий патент: Спосіб лікування хворих на метастатичний рак грудної залози