Мобільний робот для переміщення по довільно орієнтованим у робочому просторі поверхням
Номер патенту: 104113
Опубліковано: 12.01.2016
Автори: Кушнір Володимир Олександрович, Рижков Ростислав Сергійович, Топалов Андрій Миколайович, Тростинський Михайло Миколайович, Герасін Олександр Сергійович, Кондратенко Юрій Пантелійович
Формула / Реферат
Мобільний робот для переміщення по довільно орієнтованим у робочому просторі поверхням, що містить вакуумний захватний пристрій безконтактного типу для утримання робота на поверхні, дистанційний блок керування електродвигунами мобільного робота та раму плоскої конструкції, яка оснащена колісним механізмом переміщення мобільного робота, що містить ведене колесо та пару ведучих коліс, які закріплені на задній частині плоскої рами і зв'язані між собою за допомогою двостороннього редуктора, який в свою чергу жорстко з'єднаний з першим електродвигуном, закріпленим на рамі, а ведене колесо, що встановлене на передній частині плоскої рами, оснащене механізмом повороту у вигляді черв'ячного редуктора, котрий через вал з'єднаний з другим електродвигуном, причому кожне колесо покрите фрикційним матеріалом в зоні контактування з поверхнею, який відрізняється тим, що вакуумний захватний пристрій безконтактного типу виконаний у вигляді повітряного гвинта, закріпленого паралельно до поверхні на осі в центрі відкритої через весь діаметр камери циліндричної форми з кромкою, зрізаною під певним кутом, камера встановлена на рамі з забезпеченням відповідного зазору між єдиною відкритою стороною циліндричної камери та довільно орієнтованою у робочому просторі поверхнею, причому повітряний гвинт виконаний у вигляді двох лопатей і через мультиплікатор кінематично зв'язаний з третім електродвигуном, закріпленим на рамі, а сам вакуумний захватний пристрій безконтактного типу встановлений у центральній частині плоскої рами у відповідному круглому отворі.
Текст
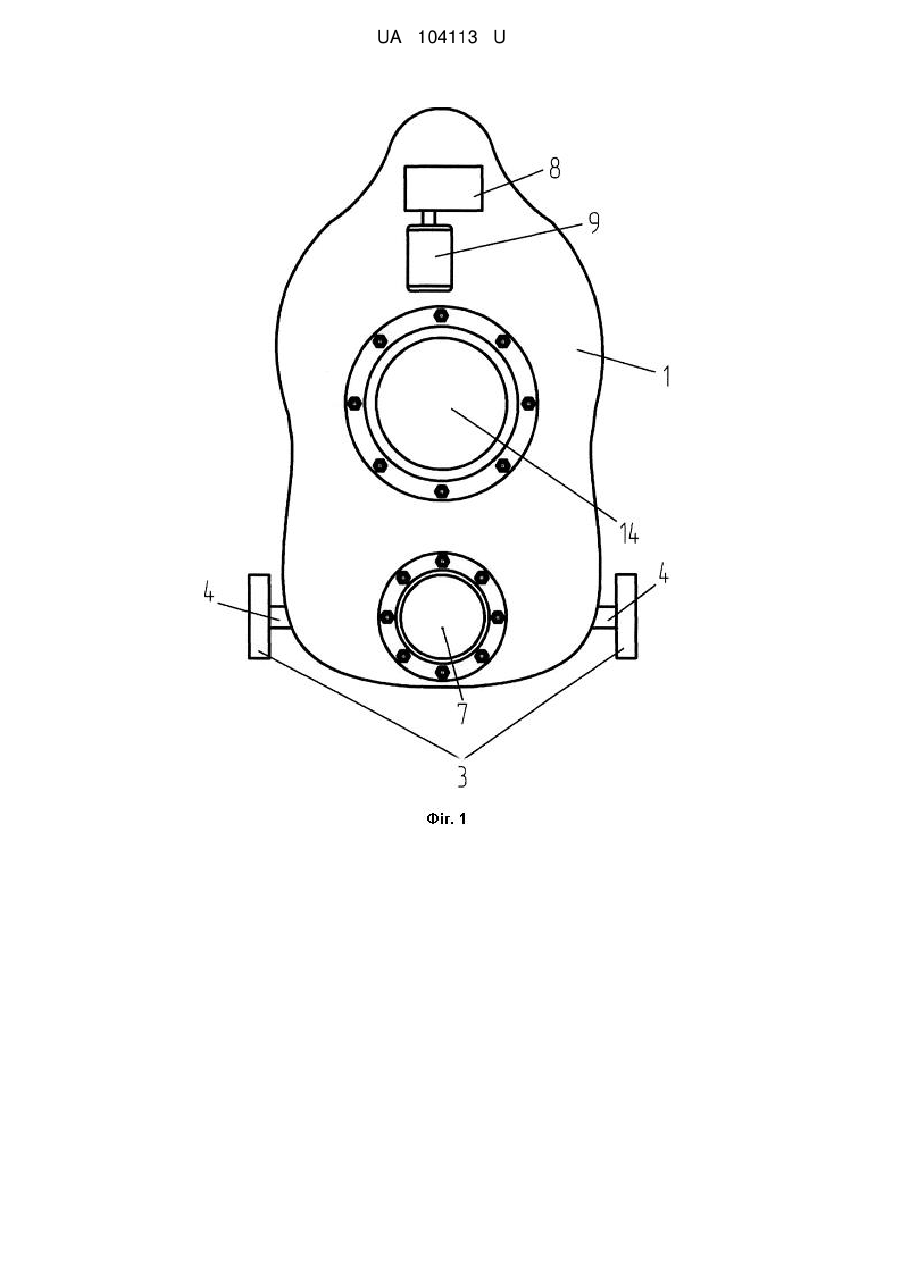
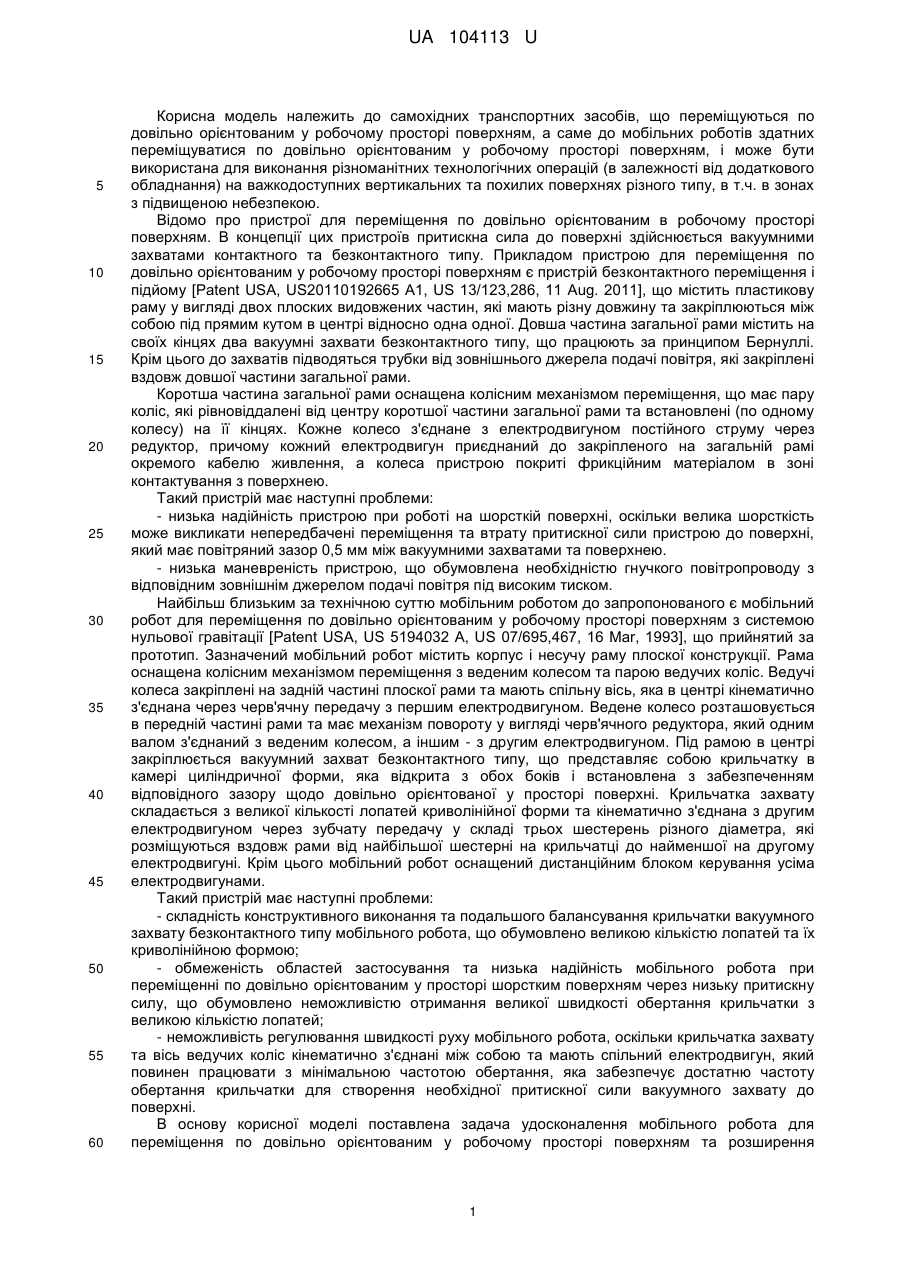
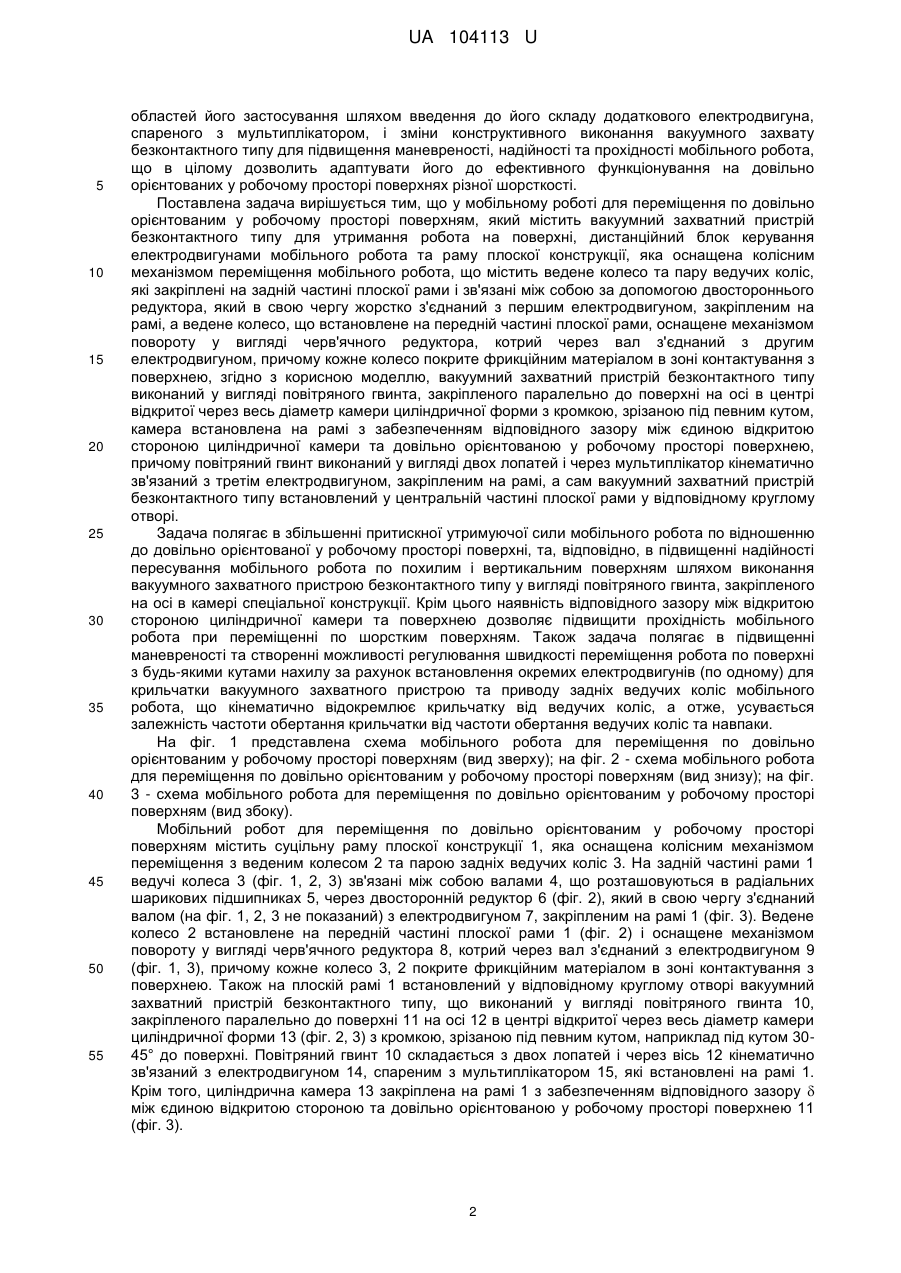
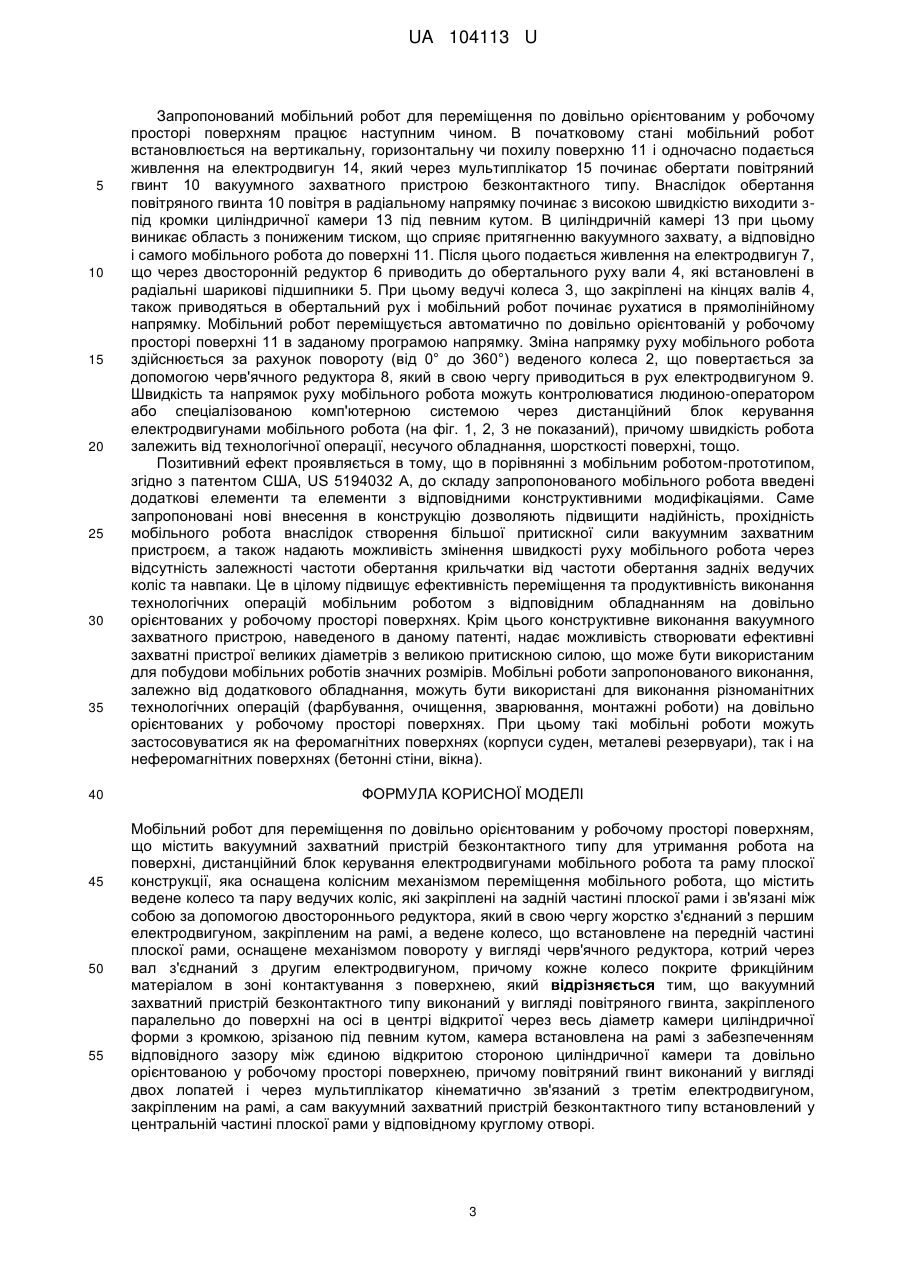
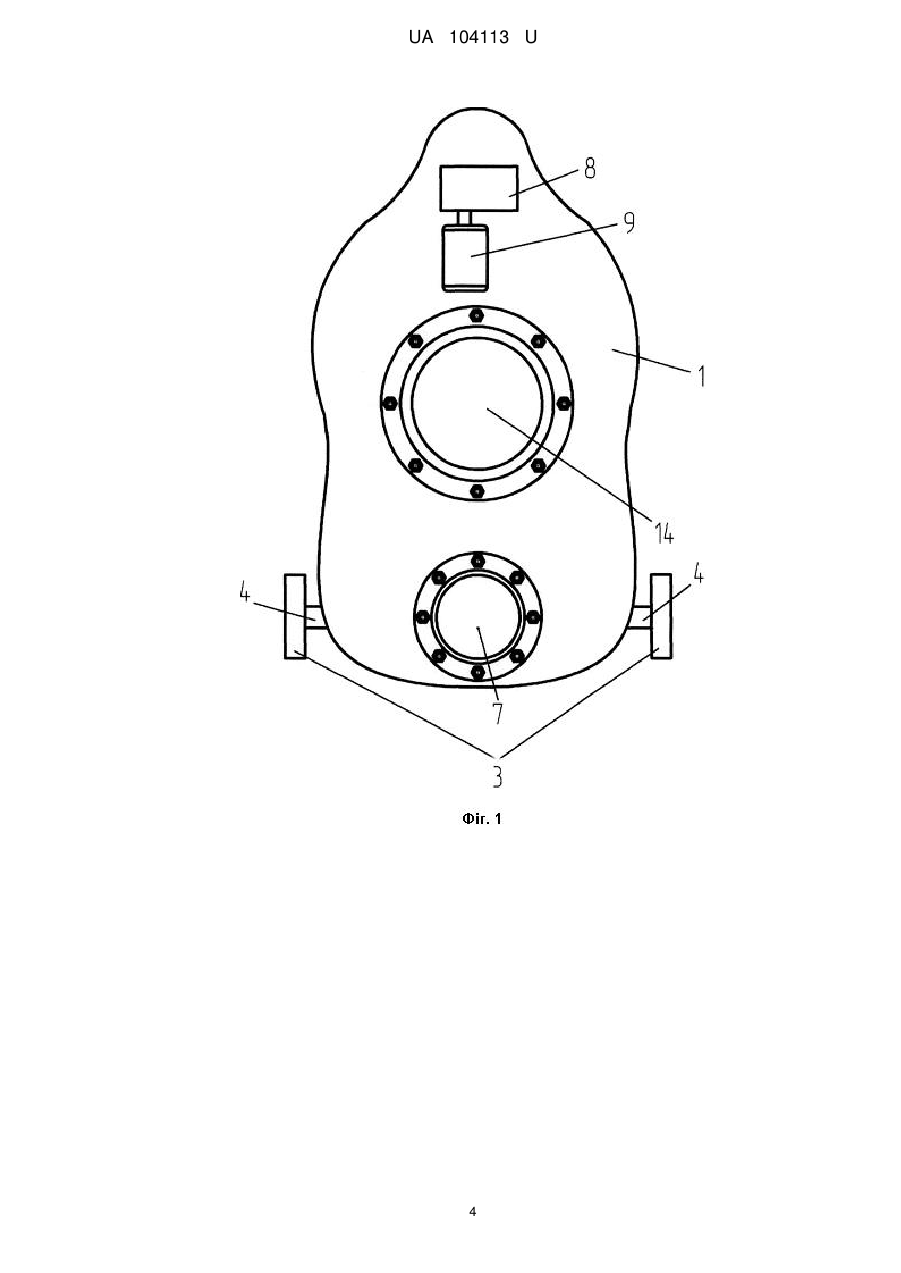
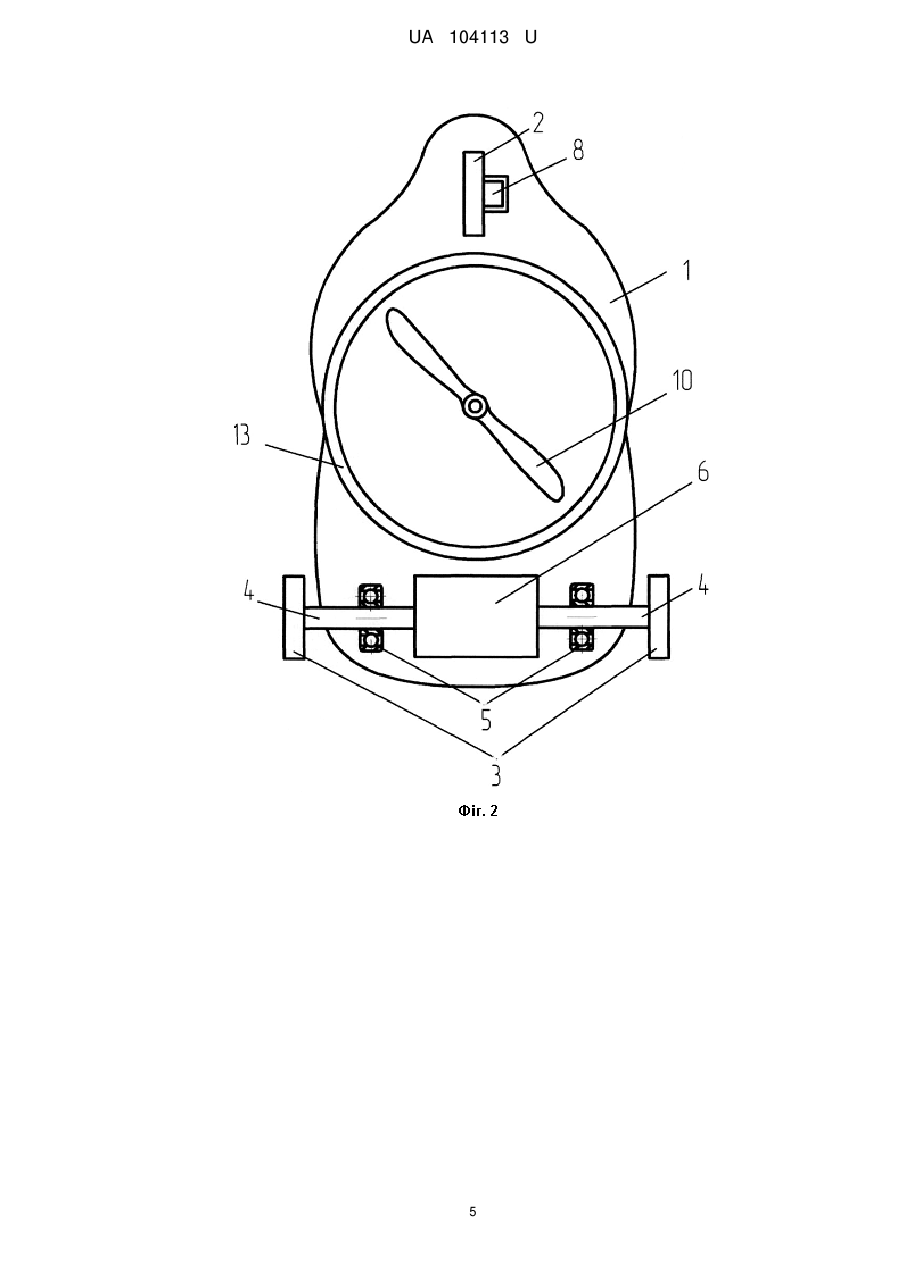
Реферат: Мобільний робот для переміщення по довільно орієнтованим у робочому просторі поверхням містить вакуумний захватний пристрій безконтактного типу, дистанційний блок керування електродвигунами мобільного робота та раму плоскої конструкції, яка оснащена колісним механізмом переміщення мобільного робота, що містить ведене колесо та пару ведучих коліс, які закріплені на задній частині плоскої рами і зв'язані між собою за допомогою двостороннього редуктора. Ведене колесо оснащене механізмом повороту у вигляді черв'ячного редуктора. Кожне колесо покрите фрикційним матеріалом в зоні контактування з поверхнею. Вакуумний захватний пристрій безконтактного типу виконаний у вигляді повітряного гвинта. Камера встановлена на рамі із забезпеченням відповідного зазору між єдиною відкритою стороною циліндричної камери та довільно орієнтованою у робочому просторі поверхнею. Повітряний гвинт виконаний у вигляді двох лопатей. Вакуумний захватний пристрій безконтактного типу встановлений у центральній частині плоскої рами у відповідному круглому отворі. UA 104113 U (12) UA 104113 U UA 104113 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до самохідних транспортних засобів, що переміщуються по довільно орієнтованим у робочому просторі поверхням, а саме до мобільних роботів здатних переміщуватися по довільно орієнтованим у робочому просторі поверхням, і може бути використана для виконання різноманітних технологічних операцій (в залежності від додаткового обладнання) на важкодоступних вертикальних та похилих поверхнях різного типу, в т.ч. в зонах з підвищеною небезпекою. Відомо про пристрої для переміщення по довільно орієнтованим в робочому просторі поверхням. В концепції цих пристроїв притискна сила до поверхні здійснюється вакуумними захватами контактного та безконтактного типу. Прикладом пристрою для переміщення по довільно орієнтованим у робочому просторі поверхням є пристрій безконтактного переміщення і підйому [Patent USA, US20110192665 А1, US 13/123,286, 11 Aug. 2011], що містить пластикову раму у вигляді двох плоских видовжених частин, які мають різну довжину та закріплюються між собою під прямим кутом в центрі відносно одна одної. Довша частина загальної рами містить на своїх кінцях два вакуумні захвати безконтактного типу, що працюють за принципом Бернуллі. Крім цього до захватів підводяться трубки від зовнішнього джерела подачі повітря, які закріплені вздовж довшої частини загальної рами. Коротша частина загальної рами оснащена колісним механізмом переміщення, що має пару коліс, які рівновіддалені від центру коротшої частини загальної рами та встановлені (по одному колесу) на її кінцях. Кожне колесо з'єднане з електродвигуном постійного струму через редуктор, причому кожний електродвигун приєднаний до закріпленого на загальній рамі окремого кабелю живлення, а колеса пристрою покриті фрикційним матеріалом в зоні контактування з поверхнею. Такий пристрій має наступні проблеми: - низька надійність пристрою при роботі на шорсткій поверхні, оскільки велика шорсткість може викликати непередбачені переміщення та втрату притискної сили пристрою до поверхні, який має повітряний зазор 0,5 мм між вакуумними захватами та поверхнею. - низька маневреність пристрою, що обумовлена необхідністю гнучкого повітропроводу з відповідним зовнішнім джерелом подачі повітря під високим тиском. Найбільш близьким за технічною суттю мобільним роботом до запропонованого є мобільний робот для переміщення по довільно орієнтованим у робочому просторі поверхням з системою нульової гравітації [Patent USA, US 5194032 A, US 07/695,467, 16 Mar, 1993], що прийнятий за прототип. Зазначений мобільний робот містить корпус і несучу раму плоскої конструкції. Рама оснащена колісним механізмом переміщення з веденим колесом та парою ведучих коліс. Ведучі колеса закріплені на задній частині плоскої рами та мають спільну вісь, яка в центрі кінематично з'єднана через черв'ячну передачу з першим електродвигуном. Ведене колесо розташовується в передній частині рами та має механізм повороту у вигляді черв'ячного редуктора, який одним валом з'єднаний з веденим колесом, а іншим - з другим електродвигуном. Під рамою в центрі закріплюється вакуумний захват безконтактного типу, що представляє собою крильчатку в камері циліндричної форми, яка відкрита з обох боків і встановлена з забезпеченням відповідного зазору щодо довільно орієнтованої у просторі поверхні. Крильчатка захвату складається з великої кількості лопатей криволінійної форми та кінематично з'єднана з другим електродвигуном через зубчату передачу у складі трьох шестерень різного діаметра, які розміщуються вздовж рами від найбільшої шестерні на крильчатці до найменшої на другому електродвигуні. Крім цього мобільний робот оснащений дистанційним блоком керування усіма електродвигунами. Такий пристрій має наступні проблеми: - складність конструктивного виконання та подальшого балансування крильчатки вакуумного захвату безконтактного типу мобільного робота, що обумовлено великою кількістю лопатей та їх криволінійною формою; - обмеженість областей застосування та низька надійність мобільного робота при переміщенні по довільно орієнтованим у просторі шорстким поверхням через низьку притискну силу, що обумовлено неможливістю отримання великої швидкості обертання крильчатки з великою кількістю лопатей; - неможливість регулювання швидкості руху мобільного робота, оскільки крильчатка захвату та вісь ведучих коліс кінематично з'єднані між собою та мають спільний електродвигун, який повинен працювати з мінімальною частотою обертання, яка забезпечує достатню частоту обертання крильчатки для створення необхідної притискної сили вакуумного захвату до поверхні. В основу корисної моделі поставлена задача удосконалення мобільного робота для переміщення по довільно орієнтованим у робочому просторі поверхням та розширення 1 UA 104113 U 5 10 15 20 25 30 35 40 45 50 55 областей його застосування шляхом введення до його складу додаткового електродвигуна, спареного з мультиплікатором, і зміни конструктивного виконання вакуумного захвату безконтактного типу для підвищення маневреності, надійності та прохідності мобільного робота, що в цілому дозволить адаптувати його до ефективного функціонування на довільно орієнтованих у робочому просторі поверхнях різної шорсткості. Поставлена задача вирішується тим, що у мобільному роботі для переміщення по довільно орієнтованим у робочому просторі поверхням, який містить вакуумний захватний пристрій безконтактного типу для утримання робота на поверхні, дистанційний блок керування електродвигунами мобільного робота та раму плоскої конструкції, яка оснащена колісним механізмом переміщення мобільного робота, що містить ведене колесо та пару ведучих коліс, які закріплені на задній частині плоскої рами і зв'язані між собою за допомогою двостороннього редуктора, який в свою чергу жорстко з'єднаний з першим електродвигуном, закріпленим на рамі, а ведене колесо, що встановлене на передній частині плоскої рами, оснащене механізмом повороту у вигляді черв'ячного редуктора, котрий через вал з'єднаний з другим електродвигуном, причому кожне колесо покрите фрикційним матеріалом в зоні контактування з поверхнею, згідно з корисною моделлю, вакуумний захватний пристрій безконтактного типу виконаний у вигляді повітряного гвинта, закріпленого паралельно до поверхні на осі в центрі відкритої через весь діаметр камери циліндричної форми з кромкою, зрізаною під певним кутом, камера встановлена на рамі з забезпеченням відповідного зазору між єдиною відкритою стороною циліндричної камери та довільно орієнтованою у робочому просторі поверхнею, причому повітряний гвинт виконаний у вигляді двох лопатей і через мультиплікатор кінематично зв'язаний з третім електродвигуном, закріпленим на рамі, а сам вакуумний захватний пристрій безконтактного типу встановлений у центральній частині плоскої рами у відповідному круглому отворі. Задача полягає в збільшенні притискної утримуючої сили мобільного робота по відношенню до довільно орієнтованої у робочому просторі поверхні, та, відповідно, в підвищенні надійності пересування мобільного робота по похилим і вертикальним поверхням шляхом виконання вакуумного захватного пристрою безконтактного типу у вигляді повітряного гвинта, закріпленого на осі в камері спеціальної конструкції. Крім цього наявність відповідного зазору між відкритою стороною циліндричної камери та поверхнею дозволяє підвищити прохідність мобільного робота при переміщенні по шорстким поверхням. Також задача полягає в підвищенні маневреності та створенні можливості регулювання швидкості переміщення робота по поверхні з будь-якими кутами нахилу за рахунок встановлення окремих електродвигунів (по одному) для крильчатки вакуумного захватного пристрою та приводу задніх ведучих коліс мобільного робота, що кінематично відокремлює крильчатку від ведучих коліс, а отже, усувається залежність частоти обертання крильчатки від частоти обертання ведучих коліс та навпаки. На фіг. 1 представлена схема мобільного робота для переміщення по довільно орієнтованим у робочому просторі поверхням (вид зверху); на фіг. 2 - схема мобільного робота для переміщення по довільно орієнтованим у робочому просторі поверхням (вид знизу); на фіг. 3 - схема мобільного робота для переміщення по довільно орієнтованим у робочому просторі поверхням (вид збоку). Мобільний робот для переміщення по довільно орієнтованим у робочому просторі поверхням містить суцільну раму плоскої конструкції 1, яка оснащена колісним механізмом переміщення з веденим колесом 2 та парою задніх ведучих коліс 3. На задній частині рами 1 ведучі колеса 3 (фіг. 1, 2, 3) зв'язані між собою валами 4, що розташовуються в радіальних шарикових підшипниках 5, через двосторонній редуктор 6 (фіг. 2), який в свою чергу з'єднаний валом (на фіг. 1, 2, 3 не показаний) з електродвигуном 7, закріпленим на рамі 1 (фіг. 3). Ведене колесо 2 встановлене на передній частині плоскої рами 1 (фіг. 2) і оснащене механізмом повороту у вигляді черв'ячного редуктора 8, котрий через вал з'єднаний з електродвигуном 9 (фіг. 1, 3), причому кожне колесо 3, 2 покрите фрикційним матеріалом в зоні контактування з поверхнею. Також на плоскій рамі 1 встановлений у відповідному круглому отворі вакуумний захватний пристрій безконтактного типу, що виконаний у вигляді повітряного гвинта 10, закріпленого паралельно до поверхні 11 на осі 12 в центрі відкритої через весь діаметр камери циліндричної форми 13 (фіг. 2, 3) з кромкою, зрізаною під певним кутом, наприклад під кутом 3045° до поверхні. Повітряний гвинт 10 складається з двох лопатей і через вісь 12 кінематично зв'язаний з електродвигуном 14, спареним з мультиплікатором 15, які встановлені на рамі 1. Крім того, циліндрична камера 13 закріплена на рамі 1 з забезпеченням відповідного зазору між єдиною відкритою стороною та довільно орієнтованою у робочому просторі поверхнею 11 (фіг. 3). 2 UA 104113 U 5 10 15 20 25 30 35 40 45 50 55 Запропонований мобільний робот для переміщення по довільно орієнтованим у робочому просторі поверхням працює наступним чином. В початковому стані мобільний робот встановлюється на вертикальну, горизонтальну чи похилу поверхню 11 і одночасно подається живлення на електродвигун 14, який через мультиплікатор 15 починає обертати повітряний гвинт 10 вакуумного захватного пристрою безконтактного типу. Внаслідок обертання повітряного гвинта 10 повітря в радіальному напрямку починає з високою швидкістю виходити зпід кромки циліндричної камери 13 під певним кутом. В циліндричній камері 13 при цьому виникає область з пониженим тиском, що сприяє притягненню вакуумного захвату, а відповідно і самого мобільного робота до поверхні 11. Після цього подається живлення на електродвигун 7, що через двосторонній редуктор 6 приводить до обертального руху вали 4, які встановлені в радіальні шарикові підшипники 5. При цьому ведучі колеса 3, що закріплені на кінцях валів 4, також приводяться в обертальний рух і мобільний робот починає рухатися в прямолінійному напрямку. Мобільний робот переміщується автоматично по довільно орієнтованій у робочому просторі поверхні 11 в заданому програмою напрямку. Зміна напрямку руху мобільного робота здійснюється за рахунок повороту (від 0° до 360°) веденого колеса 2, що повертається за допомогою черв'ячного редуктора 8, який в свою чергу приводиться в рух електродвигуном 9. Швидкість та напрямок руху мобільного робота можуть контролюватися людиною-оператором або спеціалізованою комп'ютерною системою через дистанційний блок керування електродвигунами мобільного робота (на фіг. 1, 2, 3 не показаний), причому швидкість робота залежить від технологічної операції, несучого обладнання, шорсткості поверхні, тощо. Позитивний ефект проявляється в тому, що в порівнянні з мобільним роботом-прототипом, згідно з патентом США, US 5194032 А, до складу запропонованого мобільного робота введені додаткові елементи та елементи з відповідними конструктивними модифікаціями. Саме запропоновані нові внесення в конструкцію дозволяють підвищити надійність, прохідність мобільного робота внаслідок створення більшої притискної сили вакуумним захватним пристроєм, а також надають можливість змінення швидкості руху мобільного робота через відсутність залежності частоти обертання крильчатки від частоти обертання задніх ведучих коліс та навпаки. Це в цілому підвищує ефективність переміщення та продуктивність виконання технологічних операцій мобільним роботом з відповідним обладнанням на довільно орієнтованих у робочому просторі поверхнях. Крім цього конструктивне виконання вакуумного захватного пристрою, наведеного в даному патенті, надає можливість створювати ефективні захватні пристрої великих діаметрів з великою притискною силою, що може бути використаним для побудови мобільних роботів значних розмірів. Мобільні роботи запропонованого виконання, залежно від додаткового обладнання, можуть бути використані для виконання різноманітних технологічних операцій (фарбування, очищення, зварювання, монтажні роботи) на довільно орієнтованих у робочому просторі поверхнях. При цьому такі мобільні роботи можуть застосовуватися як на феромагнітних поверхнях (корпуси суден, металеві резервуари), так і на неферомагнітних поверхнях (бетонні стіни, вікна). ФОРМУЛА КОРИСНОЇ МОДЕЛІ Мобільний робот для переміщення по довільно орієнтованим у робочому просторі поверхням, що містить вакуумний захватний пристрій безконтактного типу для утримання робота на поверхні, дистанційний блок керування електродвигунами мобільного робота та раму плоскої конструкції, яка оснащена колісним механізмом переміщення мобільного робота, що містить ведене колесо та пару ведучих коліс, які закріплені на задній частині плоскої рами і зв'язані між собою за допомогою двостороннього редуктора, який в свою чергу жорстко з'єднаний з першим електродвигуном, закріпленим на рамі, а ведене колесо, що встановлене на передній частині плоскої рами, оснащене механізмом повороту у вигляді черв'ячного редуктора, котрий через вал з'єднаний з другим електродвигуном, причому кожне колесо покрите фрикційним матеріалом в зоні контактування з поверхнею, який відрізняється тим, що вакуумний захватний пристрій безконтактного типу виконаний у вигляді повітряного гвинта, закріпленого паралельно до поверхні на осі в центрі відкритої через весь діаметр камери циліндричної форми з кромкою, зрізаною під певним кутом, камера встановлена на рамі з забезпеченням відповідного зазору між єдиною відкритою стороною циліндричної камери та довільно орієнтованою у робочому просторі поверхнею, причому повітряний гвинт виконаний у вигляді двох лопатей і через мультиплікатор кінематично зв'язаний з третім електродвигуном, закріпленим на рамі, а сам вакуумний захватний пристрій безконтактного типу встановлений у центральній частині плоскої рами у відповідному круглому отворі. 3 UA 104113 U 4 UA 104113 U 5 UA 104113 U Комп’ютерна верстка А. Крулевський Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 6
ДивитисяДодаткова інформація
Автори англійськоюKondratenko Yurii Panteliiovych
Автори російськоюКондратенко Юрий Пантелеевич
МПК / Мітки
МПК: B25J 15/00, B25J 9/00
Мітки: довільно, переміщення, просторі, робочому, робот, поверхням, мобільній, орієнтованим
Код посилання
<a href="https://ua.patents.su/8-104113-mobilnijj-robot-dlya-peremishhennya-po-dovilno-oriehntovanim-u-robochomu-prostori-poverkhnyam.html" target="_blank" rel="follow" title="База патентів України">Мобільний робот для переміщення по довільно орієнтованим у робочому просторі поверхням</a>
Мобільний робот для механічного очищення корпусу судна
Номер патенту: 100341
Опубліковано: 27.07.2015
Автори: Топалов Андрій Миколайович, Кондратенко Юрій Пантелійович, Герасін Олександр Сергійович, Кушнір Володимир Олександрович
МПК: B25J 19/00
Мітки: очищення, судна, мобільній, механічного, робот, корпусу
Формула / Реферат:
1. Мобільний робот для механічного очищення корпусу судна, що містить основні постійні магніти для утримання робота на феромагнітній поверхні корпусу судна та двокомпонентну раму плоскої конструкції, на якій прямокутна частина рами оснащена гусеничним механізмом переміщення, а кожна гусениця переміщення (ліва і права) оснащена натяжним пристроєм гусеничної стрічки, спареним електродвигуном-редуктором та ведучим і веденим колесами, крім того...
Мобільний робот
Номер патенту: 94410
Опубліковано: 10.05.2011
Автор: Чуприняк Рафал
МПК: B25J 15/02, B62D 55/00, B60K 31/00, B62D 55/08, B60K 26/00, B25J 15/00
Формула / Реферат:
Мобільний робот, який містить мобільну базу (9), оснащену основними гусеницями (1) і гусеницями, що набігають, при цьому на мобільній базі (9) закріплений маніпулятор, який відрізняється тим, що оснащений натяжним пристроєм основних гусениць, який складається з корпусу (3), з'єднаного з мобільною базою, та який має на своїх бічних стінках напрямні (11, 11') у формі ластівчина хвоста, які розміщені на відстані відносно одна одної у...
Спосіб організації прямотечійного руху газів в робочому просторі мартенівської печі
Номер патенту: 75463
Опубліковано: 17.04.2006
Автори: Мартинюк Григорій Феодосійович, Хлистун Сергій Володимирович
Мітки: газів, спосіб, печі, руху, організації, робочому, просторі, мартенівської, прямотечійного
Формула / Реферат:
1. Спосіб організації прямотечійного руху газів в робочому просторі мартенівської печі, що включає використання регенераторів теплоти відхідних газів, який відрізняється тим, що регенератори розміщують паралельно робочому простору печі з одним загальним для обох регенераторів шлаковиком, а рух газів в робочому просторі формують за рахунок газів, що витікають із паливних пальників, і стиснутого повітря, що подається в додатково передбачені...
Мобільний крокуючий робот
Номер патенту: 87719
Опубліковано: 10.08.2009
Автори: Задніпрянний Олександр Миколайович, Мащенко Сергій Валеріович
МПК: B25J 11/00, B62D 57/00
Мітки: крокуючий, робот, мобільній
Формула / Реферат:
1. Мобільний крокуючий робот, що містить внутрішню і зовнішню рухливі опорні частини, механізми горизонтального і вертикального переміщення опорних частин, кожний з яких складається з приводу, прямолінійної кінематичної пари і напрямних, механізм повороту, який відрізняється тим, що в нього введений механізм балансування, а кожна з опорних частин оснащена тільки одним механізмом переміщення, причому одна з них оснащена тільки механізмом...
Мобільний робот
Номер патенту: 93038
Опубліковано: 10.01.2011
Автор: Чуприняк Рафал
МПК: B62D 55/08, B60K 26/00, B25J 15/02, B60K 31/00
Формула / Реферат:
Мобільний робот, оснащений системами приводу і керування, а також маніпулятором, розміщеними на мобільній гусеничній платформі, що має передню гусеницю зі змінюваним кутом нахилу, призначений для нейтралізації підривних пристроїв і для проведення експертних перевірок, який відрізняється тим, що передня гусениця (2) оснащена натяжним пристроєм (1), що має телескопічний кронштейн (18'), з'єднаний із втулкою (13), у якій розміщені підшипники...
Попередній патент: Спосіб отримання тривимірних полімерних виробів
Наступний патент: Спосіб виготовлення робочого шару прецизійних алмазно-абразивних інструментів
Випадковий патент: Пристрій для отримання тонкодисперсних базальтових частинок