Мобільний робот для очищення підводних поверхонь суден
Номер патенту: 104222
Опубліковано: 25.01.2016
Автори: Герасін Олександр Сергійович, Кушнір Володимир Олександрович, Топалов Андрій Миколайович, Кондратенко Юрій Пантелійович


Формула / Реферат
Мобільний робот для очищення підводних поверхонь суден, що містить корпус, механізм переміщення корпусу та два виконавчі модулі, кожний з яких виконаний у вигляді гребного гвинта з маточинами, що оснащений приводом обертання і встановлений на корпусі з можливістю обертання навколо своєї подовжньої осі, яка перпендикулярна до підводної поверхні судна, який відрізняється тим, що введено додатковий виконавчий модуль та модуль нульової плавучості, корпус виконано у вигляді прямокутної рами, на якій закріплено модуль нульової плавучості та механізм переміщення корпусу, виконаний у вигляді оснащених відповідними підшипниками коліс, встановлених на корпусі з можливістю контактування з підводною поверхнею суден та оснащених відповідними приводами у вигляді спарених електродвигунів-редукторів, кожне колесо механізму переміщення корпусу покрите фрикційним матеріалом, кожний гребний гвинт відповідного виконавчого модуля виконаний у вигляді принаймні двох лопатей, подовжні осі яких співпадають і утворюють одну подовжню вісь відповідної пари лопатей, причому лопаті кожного гребного гвинта виконано у вигляді прямокутних пластин з загнутими під кутом 45° кінцями, кінці кожної пари лопатей з однією спільною подовжньою віссю загнуті в протилежних напрямках, при цьому кожний виконавчий модуль встановлений у відкритій камері напівсферичного типу, яка вершиною закріплена на корпусі, півсферу кожної відкритої камери зафіксовано на корпусі в повернутому до підводної поверхні судна стані, привод обертання виконавчих модулів виконано у вигляді електродвигуна з двостороннім редуктором та системи конічних зубчатих передач, а місця розташування виконавчих модулів утворюють рівнобедрений трикутник, в вершинах якого виконавчі модулі закріплені на корпусі.
Текст
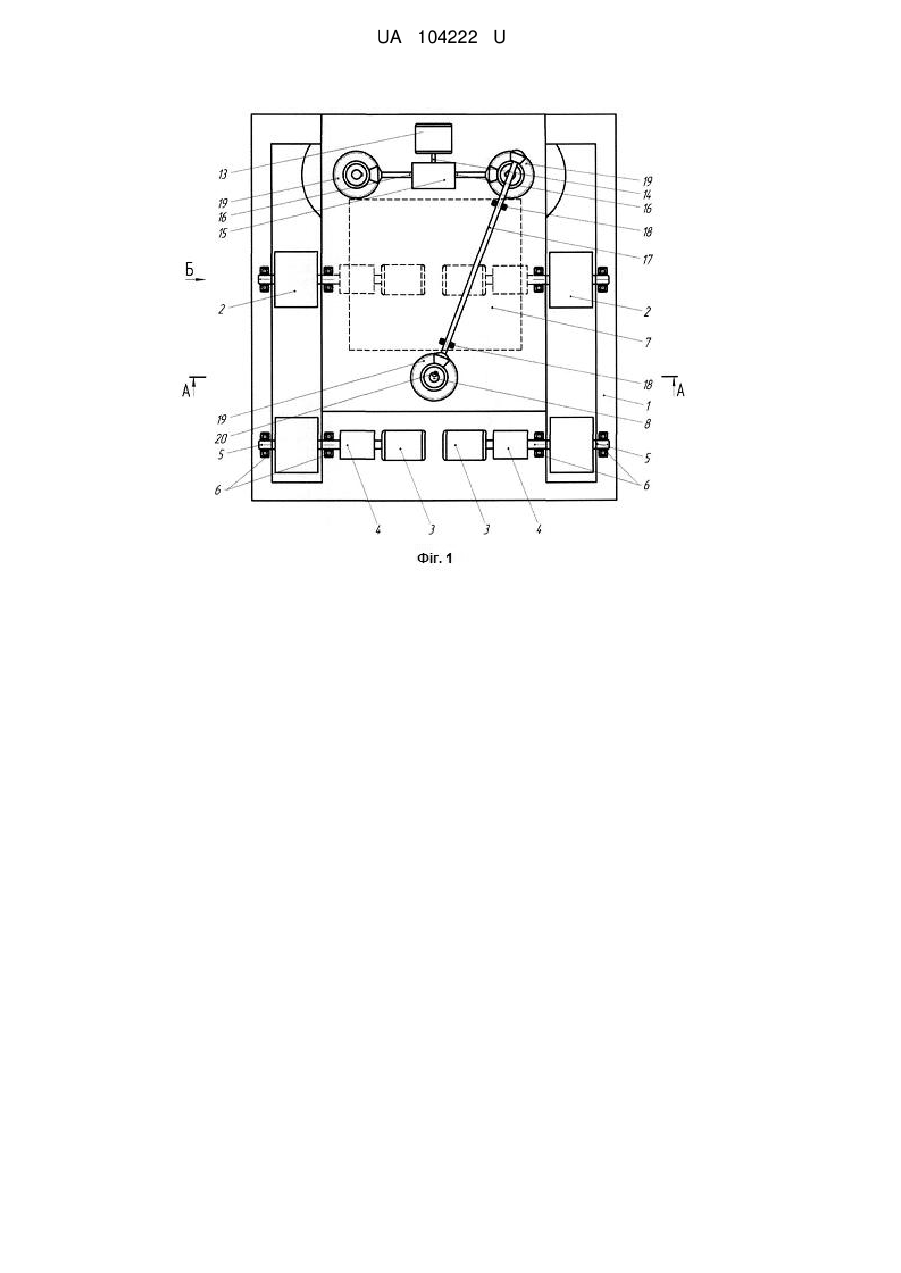
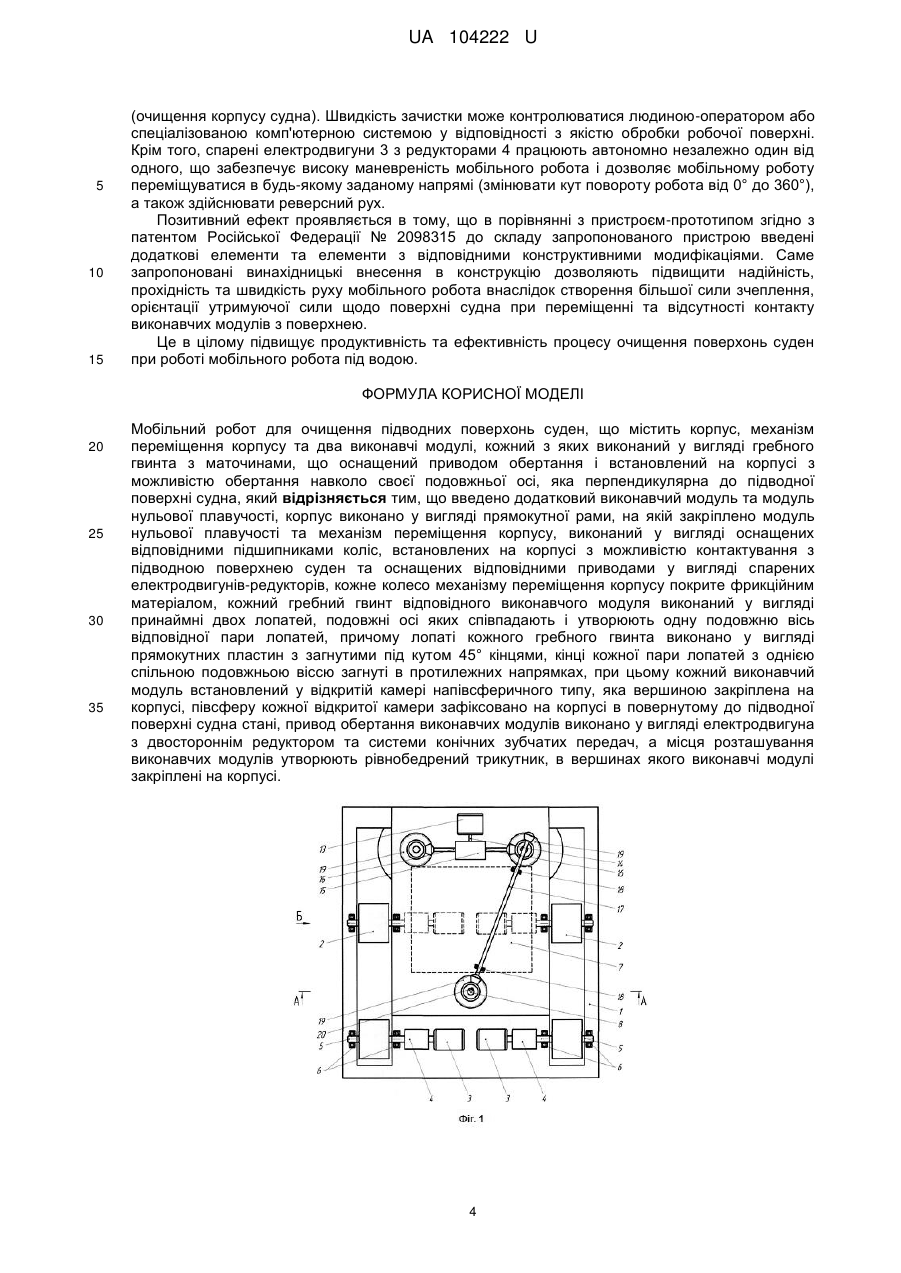
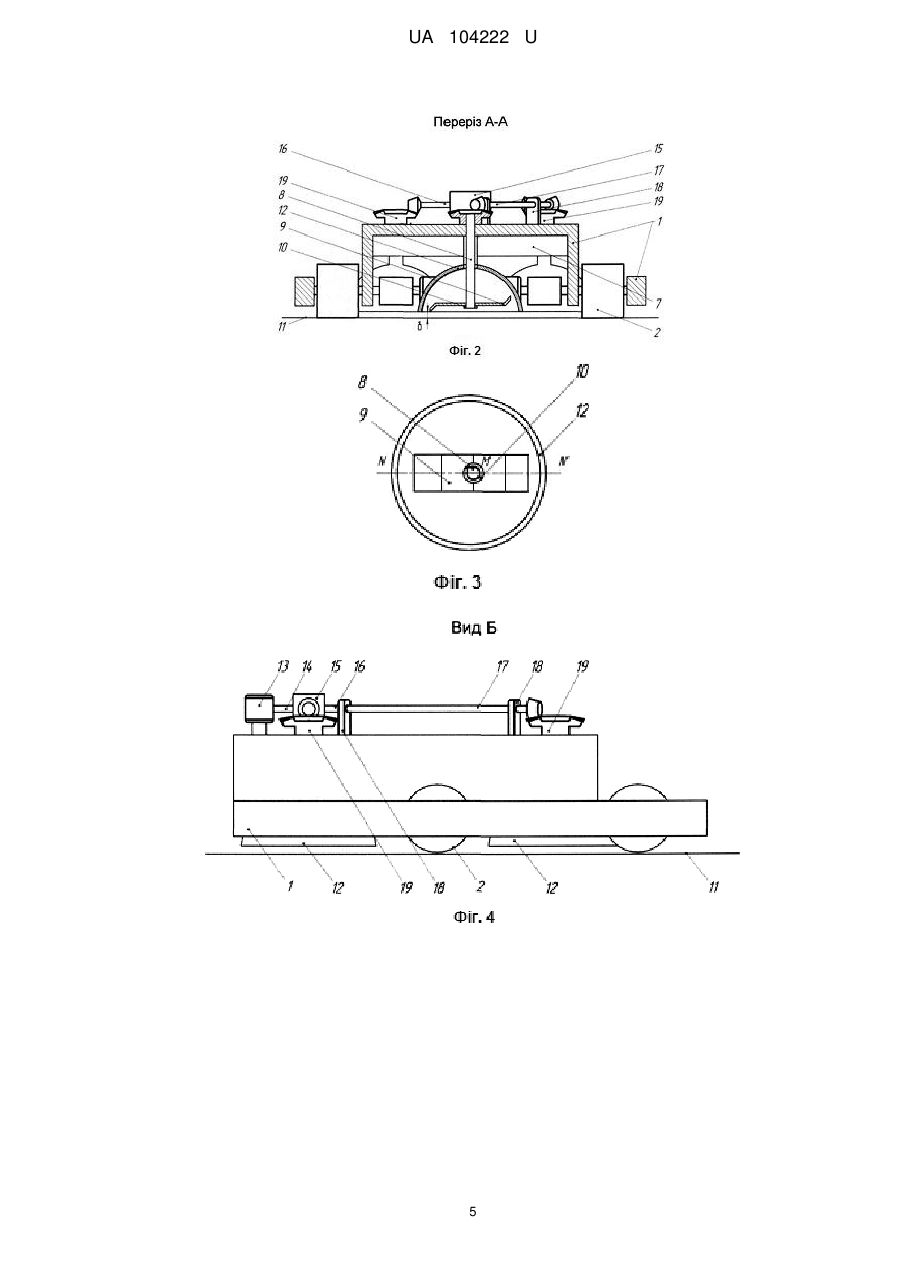
Реферат: Мобільний робот для очищення підводних поверхонь суден містить корпус, механізм переміщення корпусу та два виконавчі модулі, кожний з яких виконаний у вигляді гребного гвинта з маточинами, що оснащений приводом обертання і встановлений на корпусі з можливістю обертання навколо своєї подовжньої осі, яка перпендикулярна до підводної поверхні судна. При цьому, введено додатковий виконавчий модуль та модуль нульової плавучості, корпус виконано у вигляді прямокутної рами, на якій закріплено модуль нульової плавучості та механізм переміщення корпусу, виконаний у вигляді оснащених відповідними підшипниками коліс, встановлених на корпусі з можливістю контактування з підводною поверхнею суден та оснащених відповідними приводами у вигляді спарених електродвигунівредукторів, кожне колесо механізму переміщення корпусу покрите фрикційним матеріалом, кожний гребний гвинт відповідного виконавчого модуля виконаний у вигляді принаймні двох лопатей, подовжні осі яких співпадають і утворюють одну подовжню вісь відповідної пари лопатей, причому лопаті кожного гребного гвинта виконано у вигляді прямокутних пластин з загнутими під кутом 45° кінцями, кінці кожної пари лопатей з однією спільною подовжньою віссю загнуті в протилежних напрямках, при цьому кожний виконавчий модуль встановлений у відкритій камері напівсферичного типу, яка вершиною закріплена на корпусі, півсферу кожної відкритої камери зафіксовано на корпусі в повернутому до підводної поверхні судна стані, привод обертання виконавчих модулів виконано у вигляді електродвигуна з двостороннім редуктором та системи конічних зубчатих передач, а місця розташування виконавчих модулів утворюють рівнобедрений трикутник, в вершинах якого виконавчі модулі закріплені на корпусі. UA 104222 U (12) UA 104222 U UA 104222 U 5 10 15 20 25 30 35 40 45 50 55 60 Мобільний робот для очищення підводних поверхонь суден належить до галузей суднобудування, судноремонту та робототехніки і може бути використаний для підводного очищення корпусів суден, а також плавучих та стаціонарних споруд від водоростей та інших організмів, що накопичуються шарами під час довготривалої експлуатації. Відомо про пристрої для підводного гідродинамічного очищення корпусу судна від обростання. В концепції цих пристроїв очищення поверхні здійснюється за рахунок високонапірних струменів робочого агенту, що надходить з обертаючих сопел. Прикладом такого пристрою для підводного гідродинамічного очищення корпусу судна є пристрій для підводного гідродинамічного очищення поверхонь [Патент Російської Федерації № 2155698, кл. В63В 59/08, 2000 p.], що має корпус з опорними колесами, маршовий і притискний рушії, а також колектор. На обертальній частині колектора закріплені гідродинамічні сопла, виконані з можливістю фіксованого повороту на 360° відносно осі, перпендикулярної напрямку викиду струменя робочого агента. Пристрій забезпечений гідродинамічним кермом з тягою і регульованими захлопками. Обертаюча частина колектора кінематично зв'язана з маршовим рушієм, який виконано у вигляді гребного гвинта в насадці. Перед вхідною кромкою насадки встановлені регульовані захлопки, за вихідною кромкою насадки встановлене гідродинамічне кермо, що пов'язано тягою із задніми колесами. Колеса виконані поворотними, а їх вісь повороту зміщена щодо вертикальної осі коліс. Передні колеса розташовані всередині кільцевої зони впливу гідродинамічних сопел, а задні колеса - поза цією зоною. Такий пристрій має наступні проблеми: низька продуктивність пристрою: а) через досить обмежену площу ефективного оброблення поверхні, яка визначається кутом установки гідродинамічних сопел в поворотному вузлі, розмірами обертової частини колектора та трубопроводів, а також тиском води у трубопроводі; б) через труднощі вибору ефективного робочого режиму, оскільки при його конструктивному виконанні рух обертання від обертової частини колектора передається гребному гвинту через конічну передачу та прямий вал, внаслідок чого швидкість поступального руху пов'язана жорсткою пропорційною залежністю зі швидкістю очищення, а зміна положення рукоятки управління і, відповідно, захлопок викликає нелінійні зміни швидкості поступального руху, які впливають на швидкість очищення; обмеженість автоматичної керованості рухом пристрою, який самостійно рухається лише по прямолінійній траєкторії, а для зміни напрямку руху (поворотів) пристрою необхідна допомога водолаза. Найбільш близьким за технічною суттю мобільним роботом до запропонованого є пристрій для очищення підводних поверхонь корпусів суден [Патент Російської Федерації № 2098315, кл. В63В 59/08, 1997 p.], виконаний по другому варіанту, що прийнятий за прототип. Зазначений пристрій містить корпус, гідронасос, приводні кавітуючі сопла, гідравлічний розподільник, водометні сопла, встановлені на корпусі для забезпечення переміщення пристрою у воді в різних напрямках, гребні гвинти з маточинами, нижня частина яких виконана у вигляді сферичних опор з шарикопідшипниками в центральній частині, а також гідроциліндри, які через шарнір з'єднані з ущільнювальними вузлами, які шарнірно закріплені в опорах на паралельних осях на корпусі з можливістю повороту щодо шарнірів, розташованих в одній вертикальній площині. Крім того, на краях лопатей гвинтів в районі вихідних кромок встановлені приводні кавітуючі сопла. Такий пристрій має наступні проблеми: низька швидкодія процесу переміщення пристрою через наявність гідронасоса та гідравлічного розподільника, що збільшує час на приведення в дію приводних кавітуючих сопел під час притискання та одночасного технологічного очищення підводних поверхонь корпусів суден; низька надійність конструкції пристрою через наявність тільки двох виконавчих модулів, що є можливою причиною втрати стійкості відносно двох точок опори, які мають місце при контакті маточин з поверхнею, через дію на пристрій досить великих динамічних навантажень від морського хвилювання, які можуть викликати непередбачені переміщення пристрою, а відповідно, і порушувати робочий режим процесу очищення; низька ефективність процесу очищення поверхонь пристроєм при переміщенні через його конструктивні особливості, пов'язані із шарнірним з'єднанням гідроциліндрів з ущільнювальними вузлами та опорами на паралельних осях на корпусі при повороті відносно розміщених в одній вертикальній площині шарнірів, оскільки подовжні вісі гребних гвинтів приймають кутове положення, відмінне від 90°, відносно поверхні судна, що в свою чергу змінює напрям виходу робочої рідини через відповідні приводні кавітуючі сопла, розміщені на краях лопатей в районі вихідних кромок гребних гвинтів, та відстань від кавітуючих сопел до корпусу судна, що 1 UA 104222 U 5 10 15 20 25 30 35 40 45 50 55 60 призводить до зміни ефективності обробки при перекочуванні та, відповідно, нерівномірного очищення поверхонь. В основу корисної моделі поставлено задачу удосконалення пристрою для очищення підводних поверхонь корпусів суден шляхом введення до його складу додаткових компонентів і зміни конструктивного виконання пристрою, зокрема механізму переміщення та елементів утримання мобільного робота на робочій поверхні, з метою підвищення надійності та швидкості мобільного робота для ефективного очищення корпусу судна від обростання. Поставлена задача вирішується тим, що у мобільному роботі для очищення підводних поверхонь суден, який містить корпус, механізм переміщення корпусу та два виконавчі модулі, кожний з яких виконаний у вигляді гребного гвинта з маточинами, що оснащений приводом обертання і встановлений на корпусі з можливістю обертання навколо своєї подовжньої осі, яка перпендикулярна до підводної поверхні судна, згідно корисної моделі введено додатковий виконавчий модуль та модуль нульової плавучості, корпус виконано у вигляді прямокутної рами, на якій закріплено модуль нульової плавучості та механізм переміщення корпусу, виконаний у вигляді оснащених відповідними підшипниками коліс, встановлених на корпусі з можливістю контактування з підводною поверхнею суден та оснащених відповідними приводами у вигляді спарених електрод ви гунів-редукторів, кожне колесо механізму переміщення корпусу покрите фрикційним матеріалом, кожний гребний гвинт відповідного виконавчого модуля виконаний у вигляді принаймні двох лопатей, подовжні осі яких співпадають і утворюють одну подовжню вісь відповідної пари лопатей, причому лопаті кожного гребного гвинта виконано у вигляді прямокутних пластин з загнутими під кутом 45° кінцями, кінці кожної пари лопатей з однією спільною подовжньою віссю загнуті в протилежних напрямках, при цьому кожний виконавчий модуль встановлений у відкритій камері напівсферичного типу, яка вершиною закріплена на корпусі, півсферу кожної відкритої камери зафіксовано на корпусі в повернутому до підводної поверхні судна стані, привод обертання виконавчих модулів виконано у вигляді електродвигуна з двостороннім редуктором та системи конічних зубчатих передач, а місця розташування виконавчих модулів утворюють рівнобедрений трикутник, в вершинах якого виконавчі модулі закріплені на корпусі. Винахідницький задум полягає в тому, що особливості запропонованої конструктивної побудови мобільного робота для очищення підводних поверхонь суден, які пов'язані з оснащенням корпусу колісним механізмом переміщення та покриттям кожного колеса механізму переміщення фрикційним матеріалом, дозволяють підвищити стійкість конструкції та надійність виконання операцій технологічного очищення робочої поверхні з будь-якими кутами нахилу. За рахунок виконання лопатей кожного гребного гвинта у вигляді пари прямокутних пластин з однією спільною подовжньою віссю з загнутими в протилежних напрямках під кутом 45° кінцями, а також встановлення кожного виконавчого модуля у відкритій камері напівсферичного типу, поверненої до підводної поверхні судна, додатково підвищується стійкість конструкції та надійність виконання процесу очищення шляхом підвищення гідродинамічної утримуючої сили робота, що діє на підводну поверхню судна. Крім того закріплення кожної відкритої камери напівсферичного типу вершиною на корпусі в повернутому до підводної поверхні судна стані дозволяє підвищити ефективність процесу очищення підводних поверхонь мобільним роботом при переміщенні шляхом рівномірного очищення оброблюваної поверхні судна завдяки фіксації кутового положення виконавчих модулів. На фіг. 1 представлена схема мобільного робота для очищення підводних поверхонь суден (вигляд зверху), штриховими лініями позначені елементи, які не видно на даному вигляді; на фіг. 2 - вигляд фіксації виконавчого модуля і відкритої камери напівсферичного типу (переріз АА на фіг. 1); на фіг. 3 - схема виконавчого модуля з відкритою камерою напівсферичного типу (вигляд знизу); на фіг. 4 - схема мобільного робота для очищення підводних поверхонь суден (вигляд збоку). Мобільний робот для очищення підводних поверхонь суден, містить корпус, виконаний у вигляді прямокутної рами 1 (фіг. 1, 2, 4), яка оснащена колісним механізмом переміщення. Кожне колесо 2 кінематично з'єднано з електродвигуном 3 та редуктором 4 через вал 5, який розміщується в радіально-упорних шарикових підшипниках 6 (фіг. 1), причому електродвигун 3 разом з редуктором 4 спарені через вал електродвигуна 3. Також на прямокутній рамі 1 розміщується модуль нульової плавучості 7 (фіг. 1, 2), а на нижній поверхні прямокутної рами 1 закріплені три виконавчі модулі, кожний з яких виконаний у вигляді розміщених на спільному валу 8 (фіг. 1, 2) гребного гвинта 9 та маточини 10, яка фіксує гребний гвинт 9 на валу 8 (фіг. 3). При цьому вал 8 встановлений на прямокутній рамі 1 з можливістю обертання навколо своєї подовжньої осі, яка перпендикулярна до підводної поверхні судна 11, а кожний такий виконавчий модуль встановлений у відкритій камері напівсферичного типу 12, яка вершиною 2 UA 104222 U 5 10 15 20 25 30 35 40 45 50 55 60 закріплена на прямокутній рамі 1 (фіг. 2) в повернутому до підводної поверхні судна 11 стані з забезпеченням відповідного зазору δ (фіг. 2). Кожний гребний гвинт 9 відповідного виконавчого модуля виконаний у вигляді принаймні двох лопатей, подовжні осі яких ΜΝ та ΜΝ' (фіг. 3) співпадають і утворюють одну спільну подовжню вісь NΝ' (фіг. 3) відповідної пари лопатей, причому лопаті кожного гребного гвинта виконано у вигляді прямокутних пластин з загнутими під кутом 45° кінцями, а кінці кожної пари лопатей з однією спільною подовжньою віссю NΝ' (фіг. 3) загнуті в протилежних напрямках. Крім того прямокутна рама 1 оснащена приводом обертання валів 8 виконавчих модулів, який містить електродвигун 13, що через вал 14, двосторонній редуктор 15 (фіг. 1, 4) та розподільний вал 16 кінематично з'єднаний з валопроводом конічних зубчатих коліс 17. Розподільний вал 16 розташовується в радіальних шарикових підшипниках 18 і має зубчату передачу з конічними зубчатими колесами 19 (фіг. 1, 2, 4), які, в свою чергу, кінематично з'єднані з валами 8 за допомогою шпонок 20 (фіг. 1). Місця розташування виконавчих модулів утворюють рівнобедрений трикутник (фіг. 1), в вершинах якого виконавчі модулі закріплені на прямокутній рамі 1. Кожне колесо 2 механізму переміщення покрите фрикційним матеріалом. Запропонований мобільний робот для очищення підводних поверхонь суден працює наступним чином. Спочатку налаштовуються всі виконавчі модулі з гребними гвинтами 9 та камерами напівсферичного типу 12 по висоті на величину відповідного зазору δ від борту судна (фіг. 2), яка визначається експериментальним шляхом, для створення необхідної гідродинамічної утримуючої сили робота при обертанні гвинтів 9. Потім мобільний робот встановлюється на поверхню 11 корпусу судна. Після цього подається живлення на електродвигун 13, що через вал 14, двосторонній редуктор 15 та розподільний вал 16 приводить до руху валопровід конічних зубчатих коліс 17. Розподільний вал 16 та валопровід конічних зубчатих коліс 17 обертають конічні зубчаті колеса 19, а, відповідно, і гребні гвинти 9 виконавчих модулів. При цьому вали 8 (фіг. 1, 2), гребні гвинти 9 та маточини 10 виконавчих модулів, розміщених у протилежних (лівій і правій) вершинах рівнобедреного трикутника на прямокутній рамі 1 (фіг. 1), обертаються в різні боки, що дозволяє частково врівноважити крутні (обертові) моменти гребних гвинтів 9 і значно усунути перекіс мобільного робота під час переміщення та очищення підводної поверхні судна. При обертанні гребних гвинтів 9 у кожній відкритій камері напівсферичного типу 12 створюється розрідження (зона пониженого тиску) внаслідок різниці в швидкості двох водяних потоків. При цьому перший водяний потік формується рідиною, яка захоплюється зігнутими лопатями гвинта 9 в камері 12, огинає внутрішню напівсферичну поверхню камери 12 та виштовхується назовні (на периферію) в радіальному напрямку відносно центрів кругових проекцій півсфер кожної камери 12 на сукупність паралельних поверхні судна 11 площин (або перпендикулярно до дотичної до кола цих проекцій) через зазор δ (фіг. 2), а другий водяний потік - рідиною, яка потрапляє в камеру 12 ззовні через зазор δ (фіг. 2) вздовж підводної поверхні судна 11. Одночасно гідродинамічний тиск в камері 12 між працюючим гвинтом 9 та внутрішньою поверхнею камери 12 падає, а за рахунок різниці тисків створюється достатньо велика гідродинамічна сила, необхідна для утримання мобільного робота на поверхні 11 та відриву обростань судна від його підводної поверхні 11 в зоні камери 12 разом з другим водяним потоком. Далі відбувається перемелювання відірваних від поверхні 11 обростань гребними гвинтами 9 всередині камер 12, причому перемелені рештки організмів водного середовища існування видаляються з камер 12 першим водяним потоком. Потім подається живлення на електродвигуни 3, які через редуктори 4 починають обертати покриті фрикційним матеріалом колеса 2, що призводить до початку руху мобільного робота. При цьому прямокутна рама 1 внаслідок взаємодії створюваних гребними гвинтами 9 виконавчих модулів та камерами напівсферичного типу 12 гідравлічних сил притягнення та пружних сил покритих фрикційним матеріалом коліс 2 притискається до підводної поверхні судна 11, що забезпечує надійне зчеплення коліс 2 з поверхнею 11, що обросла мікроорганізмами, та підвищує прохідність робота. Таким чином мобільний робот починає переміщуватися по підводній поверхні судна 11 і механічно очищати її від водоростей та інших організмів водного середовища існування за допомогою гребних гвинтів 9 виконавчих модулів та камер напівсферичного типу 12. Для ефективного проведення підводних очисних робіт вали редукторів 4 і електродвигунів 3 мобільного робота (з метою забезпечення водонепроникності) оснащені композитними феромагнітними і сальниковими ущільненнями (на фіг. 1, 2, 3, 4 не показані), а сам мобільний робот споряджений відповідним модулем нульової плавучості 7. Мобільний робот переміщується автоматично по поверхні корпусу судна 11 в заданому програмою напрямку зі швидкістю, яка забезпечує виконання відповідної технологічної операції 3 UA 104222 U 5 10 15 (очищення корпусу судна). Швидкість зачистки може контролюватися людиною-оператором або спеціалізованою комп'ютерною системою у відповідності з якістю обробки робочої поверхні. Крім того, спарені електродвигуни 3 з редукторами 4 працюють автономно незалежно один від одного, що забезпечує високу маневреність мобільного робота і дозволяє мобільному роботу переміщуватися в будь-якому заданому напрямі (змінювати кут повороту робота від 0° до 360°), а також здійснювати реверсний рух. Позитивний ефект проявляється в тому, що в порівнянні з пристроєм-прототипом згідно з патентом Російської Федерації № 2098315 до складу запропонованого пристрою введені додаткові елементи та елементи з відповідними конструктивними модифікаціями. Саме запропоновані винахідницькі внесення в конструкцію дозволяють підвищити надійність, прохідність та швидкість руху мобільного робота внаслідок створення більшої сили зчеплення, орієнтації утримуючої сили щодо поверхні судна при переміщенні та відсутності контакту виконавчих модулів з поверхнею. Це в цілому підвищує продуктивність та ефективність процесу очищення поверхонь суден при роботі мобільного робота під водою. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 20 25 30 35 Мобільний робот для очищення підводних поверхонь суден, що містить корпус, механізм переміщення корпусу та два виконавчі модулі, кожний з яких виконаний у вигляді гребного гвинта з маточинами, що оснащений приводом обертання і встановлений на корпусі з можливістю обертання навколо своєї подовжньої осі, яка перпендикулярна до підводної поверхні судна, який відрізняється тим, що введено додатковий виконавчий модуль та модуль нульової плавучості, корпус виконано у вигляді прямокутної рами, на якій закріплено модуль нульової плавучості та механізм переміщення корпусу, виконаний у вигляді оснащених відповідними підшипниками коліс, встановлених на корпусі з можливістю контактування з підводною поверхнею суден та оснащених відповідними приводами у вигляді спарених електродвигунів-редукторів, кожне колесо механізму переміщення корпусу покрите фрикційним матеріалом, кожний гребний гвинт відповідного виконавчого модуля виконаний у вигляді принаймні двох лопатей, подовжні осі яких співпадають і утворюють одну подовжню вісь відповідної пари лопатей, причому лопаті кожного гребного гвинта виконано у вигляді прямокутних пластин з загнутими під кутом 45° кінцями, кінці кожної пари лопатей з однією спільною подовжньою віссю загнуті в протилежних напрямках, при цьому кожний виконавчий модуль встановлений у відкритій камері напівсферичного типу, яка вершиною закріплена на корпусі, півсферу кожної відкритої камери зафіксовано на корпусі в повернутому до підводної поверхні судна стані, привод обертання виконавчих модулів виконано у вигляді електродвигуна з двостороннім редуктором та системи конічних зубчатих передач, а місця розташування виконавчих модулів утворюють рівнобедрений трикутник, в вершинах якого виконавчі модулі закріплені на корпусі. 4 UA 104222 U 5 UA 104222 U Комп’ютерна верстка Л. Бурлак Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 6
ДивитисяДодаткова інформація
Автори англійськоюKushnir Volodymyr Oleksandrovych
Автори російськоюКушнир Владимир Александрович
МПК / Мітки
МПК: B25J 19/00, B25J 21/00
Мітки: очищення, мобільній, підводних, поверхонь, робот, суден
Код посилання
<a href="https://ua.patents.su/8-104222-mobilnijj-robot-dlya-ochishhennya-pidvodnikh-poverkhon-suden.html" target="_blank" rel="follow" title="База патентів України">Мобільний робот для очищення підводних поверхонь суден</a>
Мобільний робот для механічного очищення корпусу судна
Номер патенту: 100341
Опубліковано: 27.07.2015
Автори: Кондратенко Юрій Пантелійович, Герасін Олександр Сергійович, Кушнір Володимир Олександрович, Топалов Андрій Миколайович
МПК: B25J 19/00
Мітки: робот, судна, механічного, мобільній, очищення, корпусу
Формула / Реферат:
1. Мобільний робот для механічного очищення корпусу судна, що містить основні постійні магніти для утримання робота на феромагнітній поверхні корпусу судна та двокомпонентну раму плоскої конструкції, на якій прямокутна частина рами оснащена гусеничним механізмом переміщення, а кожна гусениця переміщення (ліва і права) оснащена натяжним пристроєм гусеничної стрічки, спареним електродвигуном-редуктором та ведучим і веденим колесами, крім того...
Пристрій для очищення гребного гвинта суден
Номер патенту: 18848
Опубліковано: 15.11.2006
Автори: Мнухін Анатолій Григорович, Мнухін Владислав Анатолійович, Брюханов Олександр Михайлович
МПК: B63H 5/00
Мітки: очищення, пристрій, гвинта, гребного, суден
Формула / Реферат:
1. Пристрій для очищення гребного гвинта суден, який містить електродну систему, з'єднану з високовольтним джерелом постійного струму, який відрізняється тим, що електродні системи вмонтовані на напрямній насадці, у якій закріплено також гребний гвинт, при цьому електродні системи вмонтовано напроти кожної лопаті, високовольтне джерело постійного струму обладнано блоком керування, один зі входів якого з'єднаний з виходом датчика рівня робочої...
Мобільний робот для переміщення по довільно орієнтованим у робочому просторі поверхням
Номер патенту: 104113
Опубліковано: 12.01.2016
Автори: Герасін Олександр Сергійович, Рижков Ростислав Сергійович, Кондратенко Юрій Пантелійович, Кушнір Володимир Олександрович, Топалов Андрій Миколайович, Тростинський Михайло Миколайович
МПК: B25J 15/00, B25J 9/00
Мітки: переміщення, мобільній, робочому, орієнтованим, довільно, поверхням, робот, просторі
Формула / Реферат:
Мобільний робот для переміщення по довільно орієнтованим у робочому просторі поверхням, що містить вакуумний захватний пристрій безконтактного типу для утримання робота на поверхні, дистанційний блок керування електродвигунами мобільного робота та раму плоскої конструкції, яка оснащена колісним механізмом переміщення мобільного робота, що містить ведене колесо та пару ведучих коліс, які закріплені на задній частині плоскої рами і зв'язані...
Мобільний робот
Номер патенту: 94410
Опубліковано: 10.05.2011
Автор: Чуприняк Рафал
МПК: B25J 15/02, B62D 55/00, B25J 15/00, B60K 26/00, B60K 31/00, B62D 55/08
Формула / Реферат:
Мобільний робот, який містить мобільну базу (9), оснащену основними гусеницями (1) і гусеницями, що набігають, при цьому на мобільній базі (9) закріплений маніпулятор, який відрізняється тим, що оснащений натяжним пристроєм основних гусениць, який складається з корпусу (3), з'єднаного з мобільною базою, та який має на своїх бічних стінках напрямні (11, 11') у формі ластівчина хвоста, які розміщені на відстані відносно одна одної у...
Мобільний крокуючий робот
Номер патенту: 87719
Опубліковано: 10.08.2009
Автори: Задніпрянний Олександр Миколайович, Мащенко Сергій Валеріович
МПК: B25J 11/00, B62D 57/00
Мітки: мобільній, крокуючий, робот
Формула / Реферат:
1. Мобільний крокуючий робот, що містить внутрішню і зовнішню рухливі опорні частини, механізми горизонтального і вертикального переміщення опорних частин, кожний з яких складається з приводу, прямолінійної кінематичної пари і напрямних, механізм повороту, який відрізняється тим, що в нього введений механізм балансування, а кожна з опорних частин оснащена тільки одним механізмом переміщення, причому одна з них оснащена тільки механізмом...
Попередній патент: Знаряддя для поверхневого обробітку ґрунту
Наступний патент: Привідний механізм стану холодної прокатки труб
Випадковий патент: Пристрій для транспортування і очистки коренебульбоплодів