Спосіб керування поворотом автопоїзда для буксирування штовханням двох одновісних причепів, приєднаних шарнірно до тягача попереду
Номер патенту: 111446
Опубліковано: 10.11.2016
Автори: Вакулюк Микола Федорович, Щербінін Сергій Олександрович, Якименко Ігор Олександрович, Кав'юк Вадим Володимирович, Колесніков Ігор Костянтинович, Васильєв Борис Георгійович
Формула / Реферат
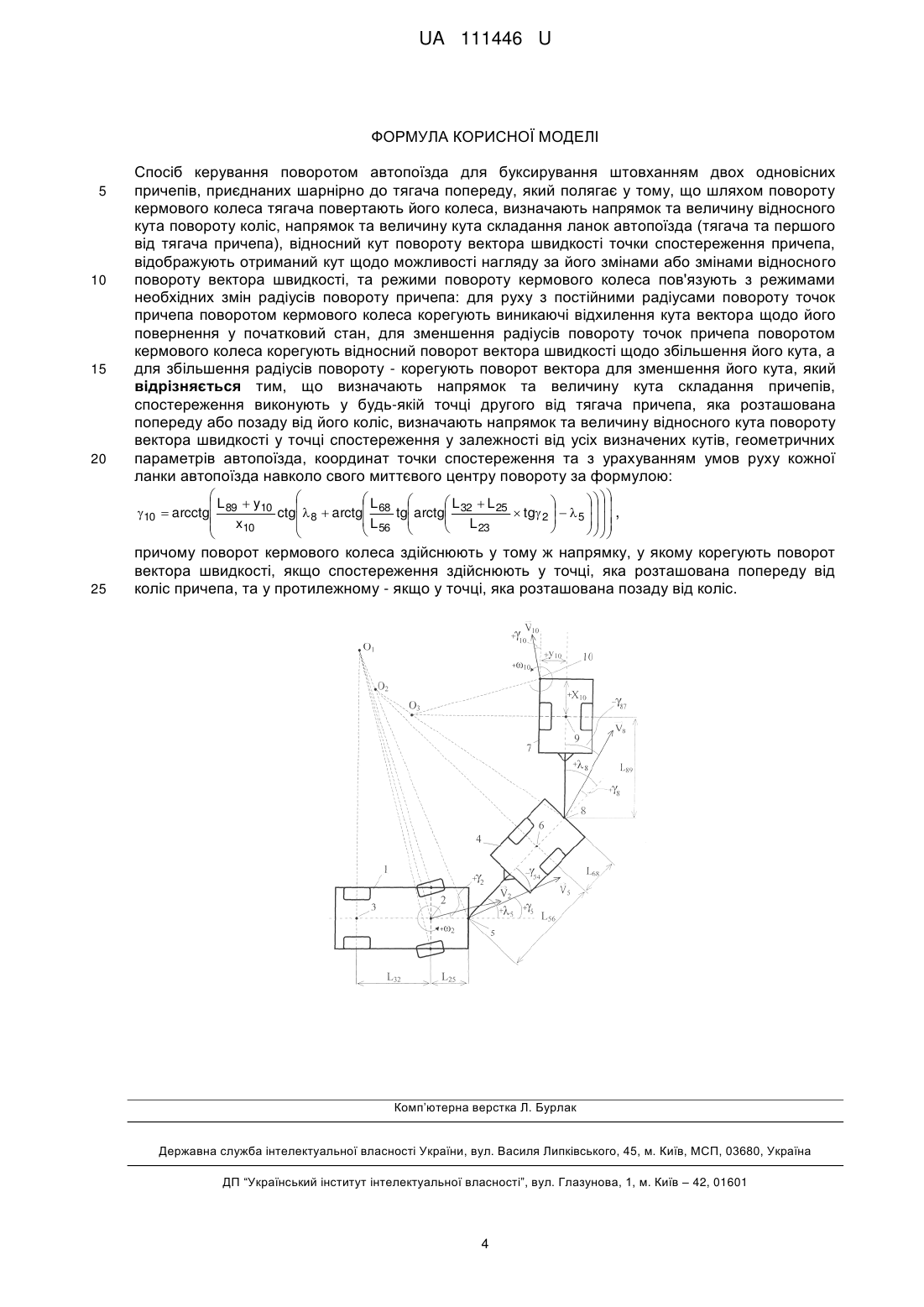
Спосіб керування поворотом автопоїзда для буксирування штовханням двох одновісних причепів, приєднаних шарнірно до тягача попереду, який полягає у тому, що шляхом повороту кермового колеса тягача повертають його колеса, визначають напрямок та величину відносного кута повороту коліс, напрямок та величину кута складання ланок автопоїзда (тягача та першого від тягача причепа), відносний кут повороту вектора швидкості точки спостереження причепа, відображують отриманий кут щодо можливості нагляду за його змінами або змінами відносного повороту вектора швидкості, та режими повороту кермового колеса пов'язують з режимами необхідних змін радіусів повороту причепа: для руху з постійними радіусами повороту точок причепа поворотом кермового колеса корегують виникаючі відхилення кута вектора щодо його повернення у початковий стан, для зменшення радіусів повороту точок причепа поворотом кермового колеса корегують відносний поворот вектора швидкості щодо збільшення його кута, а для збільшення радіусів повороту - корегують поворот вектора для зменшення його кута, який відрізняється тим, що визначають напрямок та величину кута складання причепів, спостереження виконують у будь-якій точці другого від тягача причепа, яка розташована попереду або позаду від його коліс, визначають напрямок та величину відносного кута повороту вектора швидкості у точці спостереження у залежності від усіх визначених кутів, геометричних параметрів автопоїзда, координат точки спостереження та з урахуванням умов руху кожної ланки автопоїзда навколо свого миттєвого центру повороту за формулою:
 ,
,
причому поворот кермового колеса здійснюють у тому ж напрямку, у якому корегують поворот вектора швидкості, якщо спостереження здійснюють у точці, яка розташована попереду від коліс причепа, та у протилежному - якщо у точці, яка розташована позаду від коліс.
Текст
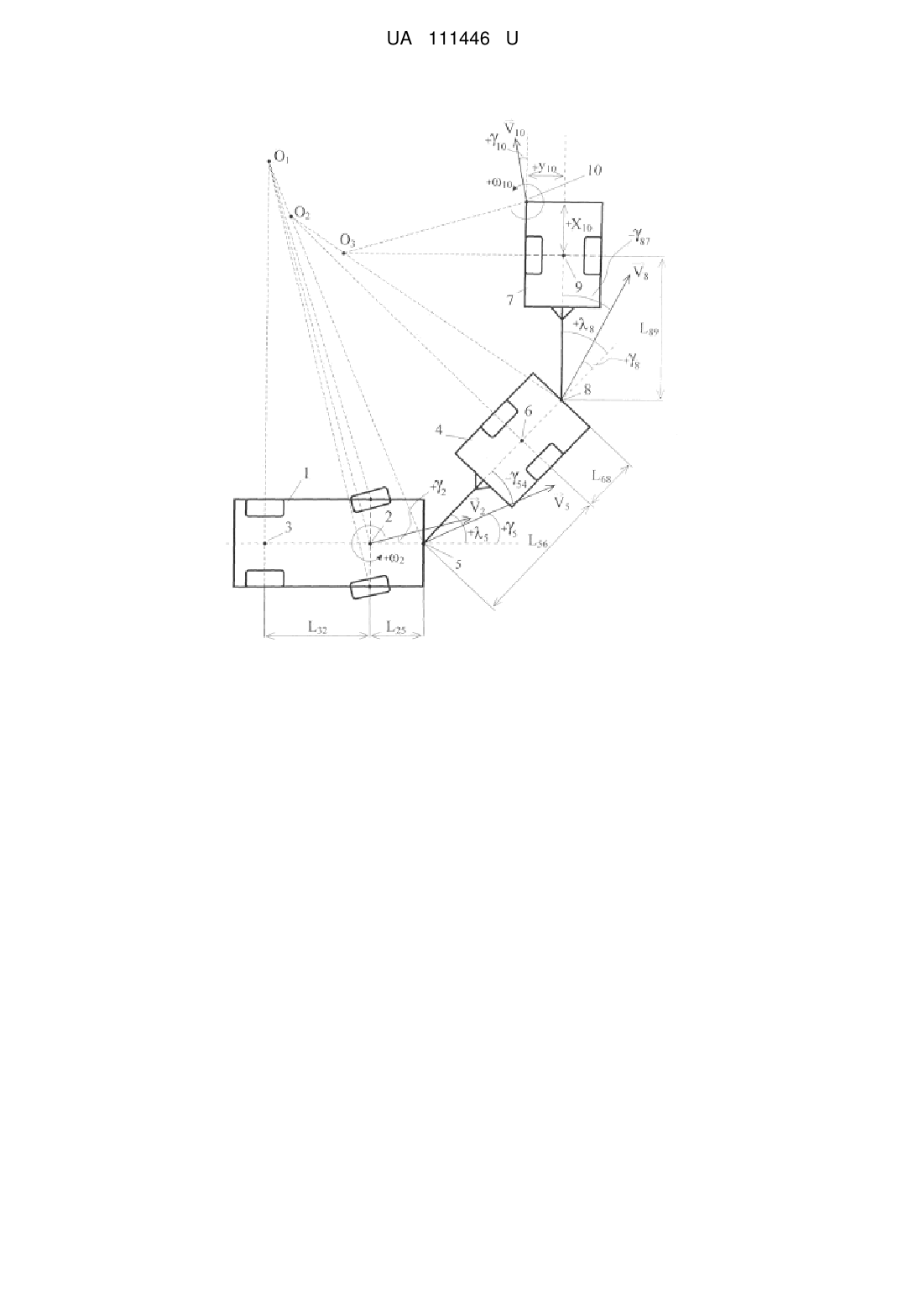
Реферат: Спосіб керування поворотом автопоїзда для буксирування штовханням двох одновісних причепів, приєднаних шарнірно до тягача попереду, полягає у тому, що шляхом повороту кермового колеса тягача повертають його колеса, визначають напрямок та величину відносного кута повороту коліс, напрямок та величину кута складання ланок автопоїзда (тягача та першого від тягача причепа), відносний кут повороту вектора швидкості точки спостереження причепа, відображують отриманий кут щодо можливості нагляду за його змінами або змінами відносного повороту вектора швидкості, та режими повороту кермового колеса пов'язують з режимами необхідних змін радіусів повороту причепа. Для руху з постійними радіусами повороту точок причепа поворотом кермового колеса корегують виникаючі відхилення кута вектора щодо його повернення у початковий стан, для зменшення радіусів повороту точок причепа поворотом кермового колеса корегують відносний поворот вектора швидкості щодо збільшення його кута, а для збільшення радіусів повороту - корегують поворот вектора для зменшення його кута. Визначають напрямок та величину кута складання причепів, спостереження виконують у будьякій точці другого від тягача причепа, яка розташована попереду або позаду від його коліс, визначають напрямок та величину відносного кута повороту вектора швидкості у точці спостереження у залежності від усіх визначених кутів, геометричних параметрів автопоїзда, координат точки стеження та з урахуванням умов руху кожної ланки автопоїзда навколо свого миттєвого центру повороту. UA 111446 U (12) UA 111446 U UA 111446 U 5 10 15 20 25 30 35 40 45 50 55 60 Запропонована корисна модель належить до автомобільної техніки та може бути використана при розробці триланкових модульних автопоїздів, у яких до тягача попереду приєднані шарнірно два модулі (технологічні, енергетичні, заправні), які побудовані на базі одновісних причепів з неповоротними колесами, зокрема снігоприбиральних машин, аеродромних теплових машин, машин розмінування методом тралення та ін. Відомий "Спосіб керування поворотом автопоїзда для буксирування штовханням одновісного причепа, приєднаного до тягача попереду" [1], який полягає у тому, що шляхом повороту кермового колеса тягача повертають його колеса, визначають напрямок та величину відносного кута повороту коліс, напрямок та величину кута складання ланок автопоїзда, відносний кут повороту вектора швидкості однієї з двох точок стеження причепа (точки переднього звису, згідно з напрямом руху, або точки шарнірного з'єднання ланок) та відображують отриманий кут щодо можливості нагляду за його змінами або змінами відносного повороту вектора швидкості. Недоліком відомого способу є те, що у ньому відсутні режими та напрямки повороту, які, з урахуванням змін кутів складання ланок автопоїзда у процесі руху, забезпечують поворот з постійними радіусами або бажане змінювання радіусів - зменшення або збільшення. Використовується тільки один режим виконання дій - синхронність повороту кермового колеса і відносного повороту вектора швидкості у точці спостереження, яка можлива тільки при зупинці автопоїзда, а у процесі руху порушується. Цей спосіб не може бути застосований для керування поворотом вказаного автопоїзда з одним причепом і тем паче з двома причепами, коли у процес втручається неконтрольоване та некероване складання вже трьох ланок автопоїзда з двома різноманітними кутами складання. Найбільш близьким до запропонованого технічним рішенням, обраним як найближчий аналог, є "Спосіб керування поворотом автопоїзда для буксирування штовханням одновісного причепа, приєднаного до тягача попереду" [2], який полягає у тому, що шляхом повороту кермового колеса тягача повертають його колеса, визначають напрямок та величину відносного кута повороту коліс, напрямок та величину кута складання ланок автопоїзда, відносний кут повороту вектора швидкості точки спостереження причепа, відображують отриманий кут щодо можливості нагляду за його змінами або змінами відносного повороту вектора швидкості. Режими повороту кермового колеса пов'язують з режимами необхідних змін радіусів повороту причепа: для руху з постійними радіусами повороту точок причепа поворотом кермового колеса корегують виникаючі відхилення кута вектора щодо його повернення у початковий стан, для зменшення радіусів повороту точок причепа поворотом кермового колеса корегують відносний поворот вектора швидкості щодо збільшення його кута, а для збільшення радіусів повороту корегують поворот вектора для зменшення його кута. Недоліком способу-найближчого аналога є те, що у ньому відсутні режими та напрямки повороту, які, з урахуванням змін кутів складання ланок автопоїзда у процесі руху, забезпечують поворот з постійними радіусами або бажане змінювання радіусів - зменшення або збільшення. В основу корисної моделі поставлена задача створити спосіб керування поворотом автопоїзда для буксирування штовханням двох одновісних причепів, приєднаних шарнірно до тягача попереду, який забезпечить можливість здійснення повороту з постійними радіусами або бажане змінювання радіусів (зменшення або збільшення) з урахуванням змін кутів складання ланок автопоїзда у процесі руху. Поставлена задача вирішується за рахунок того, що шляхом повороту кермового колеса тягача повертають його колеса, визначають напрямок та величину відносного кута повороту коліс, напрямок та величину кута складання ланок автопоїзда (тягача та першого від тягача причепа), відносний кут повороту вектора швидкості точки стеження причепа. Відображують отриманий кут щодо можливості нагляду за його змінами або змінами відносного повороту вектора швидкості. Режими повороту кермового колеса пов'язують з режимами необхідних змін радіусів повороту причепа: для руху з постійними радіусами повороту точок причепа поворотом кермового колеса корегують виникаючі відхилення кута вектора щодо його повернення у початковий стан, для зменшення радіусів повороту точок причепа поворотом кермового колеса корегують відносний поворот вектора швидкості щодо збільшення його кута, а для збільшення радіусів повороту - корегують поворот вектора для зменшення його кута. Додатково визначають напрямок та величину кута складання причепів. Спостереження виконують у будь-якій точці другого від тягача причепа, яка розташована попереду або позаду від його коліс. Визначають напрямок та величину відносного кута повороту вектора швидкості у точці спостереження у залежності від усіх визначених кутів, геометричних параметрів автопоїзда, координат точки спостереження та з урахуванням умов руху кожної ланки автопоїзда навколо свого миттєвого 1 UA 111446 U 5 10 15 20 25 30 35 40 центру повороту. Поворот кермового колеса здійснюють у тому ж напрямку, у якому корегують поворот вектора швидкості, якщо стеження здійснюють у точці, яка розташована попереду від коліс причепа, та у протилежному - якщо у точці, яка розташована позаду від коліс. Технічний результат, який може бути отриманий при здійсненні корисної моделі полягає у вирішенні проблеми повороту триланкового автопоїзда з шарнірним приєднанням до тягача попереду двох одновісних причепів з неповоротними колесами для руху без зупинок по поворотах заданої крутості (постійної або змінної), розширенні можливої сфери застосування схеми триланкових модульних автопоїздів, у яких потребується шарнірно приєднати до тягача попереду два модулі (технологічні, енергетичні, заправні), які побудовані на базі одновісних причепів з неповоротними колесами (зокрема снігоприбиральних машин, аеродромних теплових машин, машин розмінування методом тралення та ін.), покращенні маневреності та керованості. На кресленні наведена схема плоско-паралельного руху автопоїзда на повороті. Суть способу керування поворотом автопоїзда для буксирування штовханням двох одновісних причепів, приєднаних шарнірно до тягача попереду, полягає у наступному. Шляхом повороту кермового колеса тягача 1 повертають його поворотні колеса, розташовані у точці 2 (креслення). Визначають напрямок та величину відносного кута 2 цих коліс (вектора швидкості V2 , у точці 2, наприклад за допомогою датчика у кермовому колесі). За позитивний напрямок усіх відносних кутів векторів швидкості приймають кут при відхиленні вектора ліворуч (тобто коли вектор повертається проти годинникової стрілки). За позитивний напрямок повороту кермового колеса також приймають поворот проти годинникової стрілки. Тягач 1 рухається навколо свого центру повороту O1 , який розташовано на перетині радіусів повороту поворотних коліс у точці 2 та неповоротних коліс, розташованих у точці 3. Причіп 4, приєднаний до тягача 1 попереду у шарнірній точці 5, рухається як ланка автопоїзда навколо свого центру повороту O2 , який розташовано на перетині радіуса повороту неповоротних коліс у точці 6 та радіуса повороту у точці 5. Одночасно визначають напрямок та величину кута складання 5 ланок автопоїзда (тягача та першого від тягача причепа) у точці 5, який вимірюють за допомогою датчика кута. За позитивний напрямок усіх кутів складання приймають поворот передньої ланки автопоїзда (у цьому випадку - першого від тягача причепа) проти годинникової стрілки відносно задньої ланки (у цьому випадку - тягача). Другий причіп 7, приєднаний до першого причепа 4 у шарнірній точці 8, рухається як ланка автопоїзда навколо свого центру повороту O3 , який розташовано на перетині радіуса повороту неповоротних коліс у точці 9 та радіуса повороту у точці 8. Одночасно визначають напрямок та величину кута складання 8 ланок автопоїзда (першого та другого причепів) у точці 8, який вимірюють за допомогою датчика кута. На другому причепі 7 визначають напрямок та величину відносного кута повороту 10 вектора швидкості V10 у будь-якій точці стеження 10, яка розташована, згідно з напрямом руху, попереду (на відстані X10 - тобто зі знаком " + ") або позаду(на відстані X10 - тобто зі знаком " - ") від коліс причепа. Визначення кута 10 проводять у залежності від усіх визначених кутів ( 2 , 5 , 8 ), геометричних параметрів автопоїзда ( L32 , L25 , L56 , L68 , L89 ), координат точки стеження ( x10 , y10 ) та з урахуванням умов руху кожної ланки автопоїзда навколо свого миттєвого центру повороту за алгебричною формулою (з урахуванням прийнятих правил знаків): 45 L y 10 ctg arctg L 68 tg arctg L32 L 25 tg 10 arcctg 89 8 2 5 L x L56 10 23 , де: 2 , 10 - відносні кути повороту векторів V2 , V10 відповідно; 5 , 8 - кути складання ланок автопоїзда у точках 5 та 8 відповідно; L32 , L25 , L56 , L68 , L89 - геометричні параметри автопоїзда; x10 , y10 - координати точки стеження 10, де, відносно до y10 , прийнято наступне правило знаків: "+" - при розташуванні точки стеження ліворуч від поздовжньої лінії; "-" - праворуч. 2 UA 111446 U 5 10 15 20 25 30 35 40 45 Для визначення відносного кута повороту вектора швидкості використовують електроннообчислювальні пристрої або їх механічні аналоги, наприклад важільний механізм - система важелів та тяг від кермової трапеції у точці 2 до точки 5, потім - до точки 8 і далі - до точки 10. Отриманий кут 10 відображують у вигляді стрілки у точці 10 (або на панелі приладів) для V10 . можливості нагляду за його змінами або за змінами відносного повороту вектора Режими повороту кермового колеса тягача 1 пов'язують з режимами необхідних змін радіусів повороту другого причепа 7 наступним чином. Якщо спостереження здійснюють у точці, яка розташована попереду від коліс причепа (координата X10 має знак " + "), то поворот кермового колеса здійснюють у тому ж напрямку, у V10 (фіг. 1). якому корегують поворот вектора швидкості Для руху з постійними радіусами повороту точок причепа 7 фіксують (запам'ятовують) кут 10 і стежать, у який бік (у процесі подальшого руху та змін кутів складання 5 , 8 ) відхилиться вектор (стрілка) V10 . При відхиленні вектора праворуч починають повертати кермове колесо ліворуч ( 2 ), щоб повертати вектор теж ліворуч ( 10 ), тобто у тому ж напрямку. Швидкість повертання кермового колеса збільшують до того моменту, доки не буде подолано вплив зміни кутів складання - це момент початку повороту вектора ліворуч. Цей процес припиняють при досягненні вектором початкового значення кута 10 . При відхиленні вектора ліворуч проводять ті ж самі корегуючи дії, але у протилежному напрямку - праворуч ( 2,10 ). Для зменшення радіусів повороту точок причепа поворотом кермового колеса корегують відносний поворот вектора V10 щодо збільшення кута 10 . Для цього стежать за напрямком розташування вектора V10 відносно поздовжньої лінії та необхідним напрямком його повороту. При розташуванні його праворуч стежать, щоб він повертався теж праворуч ( 10 ). Якщо цього не відбувається (за рахунок змін кутів складання), або треба прискорити цей процес, то повертають кермове колесо з необхідною швидкістю у тому ж напрямку - праворуч 2 ). Поворот зупиняють, коли зникає потрібність подальшого зменшення радіусів повороту. При V10 ліворуч проводять ті ж самі дії, тільки у протилежному напрямку розташуванні вектора ліворуч ( 2,10 ). Для збільшення радіусів повороту точок причепа поворотом кермового колеса корегують відносний поворот вектора V10 щодо зменшення кута 10 . Для цього при розташуванні його праворуч поздовжньої лінії стежать за тим, щоб він повертався ліворуч ( 10 ). Якщо цього не відбувається (за рахунок змін кутів складання) або треба прискорити цей процес, то повертають кермове колесо з необхідною швидкістю у тому ж напрямку - ліворуч ( 2 ). Поворот зупиняють, коли зникає потреба подальшого збільшування радіусів повороту причепа. При розташуванні вектора V10 ліворуч призводять ті ж самі дії, тільки у протилежному напрямку - праворуч ( 2,10 ). Якщо спостереження здійснюють у точці, яка розташована позаду від коліс причепа 7 (координата X10 має знак " - "), поворот кермового колеса здійснюють у протилежному V10 . напрямку, ніж у якому корегують поворот вектора швидкості ДЖЕРЕЛА ІНФОРМАЦІЇ: 1. Васильєв Б.Г. Повышение маневренности и мобильности модульных машин аэродромнотехнического обеспечения полетов авиации / Б.Г.Васильев, Ю.В. Баистов, С.А. Бодько, В.В. Кириченко // Зб.наук.пр. ХУПС. - Х.: ХУПС, 2011. - Вип. 1 (27). - С. 31-34. 2. Патент на корисну модель № 95107, Україна, МПК B62D 15/00, 49/00, 53/00. Спосіб керування поворотом автопоїзда для буксирування штовханням одновісного причепа, приєднаного до тягача попереду / В.В. Кав'юк, Б.Г. Васильєв та інш. - № u201407214; заявл. 26.06.2014; опубл. 10.12.2014, Бюл. № 23. 3 UA 111446 U ФОРМУЛА КОРИСНОЇ МОДЕЛІ 5 10 15 20 Спосіб керування поворотом автопоїзда для буксирування штовханням двох одновісних причепів, приєднаних шарнірно до тягача попереду, який полягає у тому, що шляхом повороту кермового колеса тягача повертають його колеса, визначають напрямок та величину відносного кута повороту коліс, напрямок та величину кута складання ланок автопоїзда (тягача та першого від тягача причепа), відносний кут повороту вектора швидкості точки спостереження причепа, відображують отриманий кут щодо можливості нагляду за його змінами або змінами відносного повороту вектора швидкості, та режими повороту кермового колеса пов'язують з режимами необхідних змін радіусів повороту причепа: для руху з постійними радіусами повороту точок причепа поворотом кермового колеса корегують виникаючі відхилення кута вектора щодо його повернення у початковий стан, для зменшення радіусів повороту точок причепа поворотом кермового колеса корегують відносний поворот вектора швидкості щодо збільшення його кута, а для збільшення радіусів повороту - корегують поворот вектора для зменшення його кута, який відрізняється тим, що визначають напрямок та величину кута складання причепів, спостереження виконують у будь-якій точці другого від тягача причепа, яка розташована попереду або позаду від його коліс, визначають напрямок та величину відносного кута повороту вектора швидкості у точці спостереження у залежності від усіх визначених кутів, геометричних параметрів автопоїзда, координат точки спостереження та з урахуванням умов руху кожної ланки автопоїзда навколо свого миттєвого центру повороту за формулою: L L L 25 L y10 10 arcctg 89 ctg 8 arctg 68 tg arctg 32 tg 2 5 , L L 56 x10 23 25 причому поворот кермового колеса здійснюють у тому ж напрямку, у якому корегують поворот вектора швидкості, якщо спостереження здійснюють у точці, яка розташована попереду від коліс причепа, та у протилежному - якщо у точці, яка розташована позаду від коліс. Комп’ютерна верстка Л. Бурлак Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 4
ДивитисяДодаткова інформація
МПК / Мітки
МПК: B62D 53/00, B62D 49/00, B62D 15/00
Мітки: приєднаних, причепів, шарнірно, буксирування, поворотом, одновісних, спосіб, штовханням, двох, керування, тягача, автопоїзда, попереду
Код посилання
<a href="https://ua.patents.su/6-111446-sposib-keruvannya-povorotom-avtopozda-dlya-buksiruvannya-shtovkhannyam-dvokh-odnovisnikh-prichepiv-priehdnanikh-sharnirno-do-tyagacha-poperedu.html" target="_blank" rel="follow" title="База патентів України">Спосіб керування поворотом автопоїзда для буксирування штовханням двох одновісних причепів, приєднаних шарнірно до тягача попереду</a>
Спосіб керування поворотом автопоїзда для буксирування штовханням одновісного причепа, приєднаного до тягача попереду
Номер патенту: 95107
Опубліковано: 10.12.2014
Автори: Кав'юк Вадим Володимирович, Спіцин Віталій Сергійович, Стояновський Дмитро Анатолійович, Прохоров Ілья Вадимович, Васильєв Борис Георгійович, Федотов Мирослав Іванович
МПК: B62D 53/00, B62D 15/00, B62D 49/00
Мітки: причепа, попереду, керування, приєднаного, буксирування, автопоїзда, одновісного, тягача, штовханням, поворотом, спосіб
Формула / Реферат:
Спосіб керування поворотом автопоїзда для буксирування штовханням одновісного причепа, приєднаного до тягача попереду, який полягає у тому, що шляхом повороту кермового колеса тягача повертають його колеса, визначають напрямок та величину відносного кута повороту коліс, напрямок та величину кута складання ланок автопоїзда, відносний кут повороту вектора швидкості однієї з двох точок стеження причепа - точки переднього звису (згідно з...
Спосіб керування курсовим рухом автопоїзда для буксирування штовханням одновісного причепа, приєднаного до тягача попереду
Номер патенту: 100449
Опубліковано: 27.07.2015
Автори: Крушинський Богдан Валентинович, Кав'юк Вадим Володимирович, Лисак Богдан Олександрович, Васильєв Борис Георгійович, Кудрявцева Алла Петрівна, Мазур Владислав Анатолійович
МПК: B62D 49/04, B62D 53/00
Мітки: автопоїзда, приєднаного, спосіб, штовханням, керування, курсовим, буксирування, причепа, рухом, попереду, тягача, одновісного
Формула / Реферат:
Спосіб керування курсовим рухом автопоїзда для буксирування штовханням одновісного причепа, приєднаного до тягача попереду, що полягає у тому, що шляхом повороту кермового колеса тягача повертають його поворотні колеса, визначають напрямок та величину відносного кута повороту коліс, кута складання ланок автопоїзда, відносного кута повороту вектора швидкості у точці стеження, якою є точка переднього звису причепа (згідно з напрямком руху), та...
Спосіб керування поворотом автопоїзда для подачі заднім ходом буксированого позаду одновісного причепа з неповоротними колесами
Номер патенту: 101444
Опубліковано: 10.09.2015
Автори: Груньов Євгеній Ігорович, Васильєв Борис Георгійович, Кав'юк Вадим Володимирович, Піхур Андрій Володимирович, Петруша Олександр Сергійович, Вижиковський Роман Ігорович
МПК: B62D 13/06, B62D 53/00
Мітки: заднім, автопоїзда, ходом, колесами, подачі, спосіб, керування, поворотом, буксированого, неповоротними, причепа, одновісного, позаду
Формула / Реферат:
Спосіб керування поворотом автопоїзда для подачі заднім ходом буксированого позаду одновісного причепа з неповоротними колесами, який полягає у тому, що шляхом повороту кермового колеса тягача повертають його колеса, визначають напрямок та величину відносного кута повороту коліс, напрямок та величину кута складання ланок автопоїзда, відносного кута повороту вектора швидкості точки стеження причепа та відображують отриманий кут вектора щодо...
Спосіб керування курсовим рухом автопоїзда для подачі заднім ходом буксирувалього позаду одновісного причепа з неповоротними колесами
Номер патенту: 102036
Опубліковано: 12.10.2015
Автори: Горач Максим Ігорович, Черниш Дмитро Генадійович, Горач Андрій Ігорович, Остапенко Іван Володимирович, Кав'юк Вадим Володимирович, Васильєв Борис Георгійович
МПК: B62D 53/00, B62D 13/06
Мітки: автопоїзда, курсовим, ходом, колесами, одновісного, подачі, спосіб, позаду, керування, буксирувалього, заднім, неповоротними, рухом, причепа
Формула / Реферат:
Спосіб керування курсовим рухом автопоїзда для подачі заднім ходом буксирувального позаду одновісного причепа з неповоротними колесами, який полягає у тому, що шляхом повороту кермового колеса тягача повертають його поворотні колеса, визначають напрямок та величину відносного кута повороту коліс, кута складання ланок автопоїзда, відносного кута повороту вектора швидкості у точці стеження та відображують у цій точці отриманий напрямок вектора...
Механізм керування поворотом напівпричепа автопоїзда з електроприводом та зубчастими передачами з різними передаточними числами на кожну вісь
Номер патенту: 109819
Опубліковано: 12.10.2015
Автори: Ковальчук Григорій Олексійович, Сахно Володимир Прохорович, Поляков Віктор Михайлович, Босенко Володимир Миколайович, Гуменюк Павло Олександрович, Прогній Павло Богданович
МПК: B62D 13/02, B62D 7/15
Мітки: передачами, напівпричепа, керування, механізм, кожну, електроприводом, різними, вісь, передаточними, зубчастими, числами, автопоїзда, поворотом
Формула / Реферат:
Механізм керування поворотом напівпричепа автопоїзда з електроприводом та зубчастими передачами з різними передаточними числами на кожну вісь, який включає три електродвигуни зі стрічковими гальмівними пристроями зупинки та утримання у нерухомому стані роторів електродвигунів при припиненні електронною системою подачі до них струму під час руху причепа по фіксованому радіусу на повороті та при виключених електродвигунах, три зубчасті...
Попередній патент: Термоелектричний генераторний каскадний модуль
Наступний патент: Спосіб визначення динамічних характеристик теплових пожежних сповіщувачів
Випадковий патент: Планетарна передача