B25J — Маніпулятори; камери, обладнані маніпуляторами
Спосіб адаптації інтелектуального робота до маси об’єктів маніпулювання
Номер патенту: 41195
Опубліковано: 12.05.2009
Автори: Кондратенко Юрій Пантелійович, Кондратенко Володимир Юрійович
МПК: G05B 19/00, B25J 19/02
Мітки: маси, маніпулювання, інтелектуального, робота, адаптації, спосіб, об'єктів
Формула / Реферат:
Спосіб адаптації інтелектуального робота до маси об'єктів маніпулювання, згідно з яким переміщують захватний орган з принаймні двома затискними губками таким чином, щоб об'єкт маніпулювання знаходився між затискними губками захватного органа в центрованому відносно губок положенні, після чого здійснюють стискання губок у напрямку скорочення відстані між ними і реєструють інформацію про одночасне контактування обох затискних губок з об'єктом...
Пристрій для керування інтелектуальним роботом
Номер патенту: 41121
Опубліковано: 12.05.2009
Автори: Кондратенко Володимир Юрійович, Кондратенко Галина Володимирівна, Аль Суод Махмуд мохаммад Салем, Кондратенко Юрій Пантелійович
МПК: G05B 19/00, B25J 19/02
Мітки: керування, інтелектуальним, пристрій, роботом
Формула / Реферат:
Пристрій для керування інтелектуальним роботом, що містить захватний орган, дві затискні губки, послідовно з'єднані датчик проковзування, перший підсилювач, диференціатор, перший пороговий елемент, вихід якого з'єднаний з S-входом першого RS-тригера, R-вхід якого призначений для сприйняття сигналу запуску і є входом пристрою, елемент І, перший і другий входи якого з'єднані з виходами тактильних датчиків, встановлених на затискних губках,...
Спосіб ідентифікації величини стискального зусилля інтелектуального робота
Номер патенту: 41120
Опубліковано: 12.05.2009
Автори: Аль Суод Махмуд мохаммад Салем, Кондратенко Юрій Пантелійович, Кондратенко Галина Володимирівна, Кондратенко Володимир Юрійович
МПК: G05B 19/00, B25J 19/02
Мітки: величини, стискального, спосіб, зусилля, робота, інтелектуального, ідентифікації
Формула / Реферат:
Спосіб ідентифікації величини стискального зусилля інтелектуального робота, згідно з яким переміщують захватний орган з двома затискними губками в область робочої зони робота, де знаходиться об'єкт маніпулювання, і орієнтують губки захватного органа таким чином, щоб між ними знаходився об'єкт маніпулювання, після чого здійснюють стискання губок захватного органа в напрямку скорочення відстані між нимиз контролюванням моментів контактування...
Пристрій ідентифікації та аналізу тактильних сигналів для інформаційно-керуючої системи адаптивного робота

Номер патенту: 40710
Опубліковано: 27.04.2009
Автори: Кондратенко Юрій Пантелійович, Шишкін Олександр Сергійович, Кондратенко Галина Володимирівна, Запорожець Юрій Михайлович
МПК: B25J 19/02
Мітки: адаптивного, ідентифікації, тактильних, пристрій, сигналів, системі, аналізу, робота, інформаційно-керуючої
Формула / Реферат:
Пристрій ідентифікації та аналізу тактильних сигналів для комп'ютерної інформаційно-керуючої системи адаптивного робота з одним входом та трьома виходами, що має у своєму складі послідовно з'єднані перший датчик проковзування деталі й перший підсилювач, тактильний датчик, встановлений на одній з губок захвата робота, перший блок затримки, привід губок захвата, перший елемент АБО, послідовно з'єднані перший RS-тригер, інтегратор, перший...
Датчик проковзування об’єкта маніпулювання адаптивного робота
Номер патенту: 36077
Опубліковано: 10.10.2008
Автори: Марковський Ігор Володимирович, Кондратенко Юрій Пантелійович, Чернов Сергій Костянтинович, Кондратенко Володимир Юрійович, Кондратенко Галина Володимирівна
МПК: B25J 19/02
Мітки: датчик, адаптивного, робота, маніпулювання, проковзування, об'єкта
Формула / Реферат:
Датчик проковзування об'єкта маніпулювання адаптивного робота, що містить корпус, в якому розміщено магнітну систему, до складу якої входить циліндричний ролик, виконаний у вигляді принаймні одного замкнутого тороїдального намагніченого магнітопроводу з нанесеним на твірну поверхню ролика захисним пружним покриттям і з можливістю обертання ролика навколо своєї осі, та закріплений на корпусі магніточутливий елемент, до складу якого входять...
Захоплювальний пристрій

Номер патенту: 32431
Опубліковано: 12.05.2008
Автори: Мошковський Олег Миколайович, Кузнєцов Юрій Миколайович, Грисюк Олександр Віталійович
МПК: B25B 11/00, B25J 15/12, B25J 15/00 ...
Мітки: пристрій, захоплювальний
Формула / Реферат:
Захоплювальний пристрій, що містить корпус, закріплений на ньому пневмоциліндр і затискні губки, при цьому пневмоциліндр оснащений поршнем з штоком, а затискні губки виконані у вигляді еластичних балонів і розташовані з боку штокової частини пневмоциліндра, який відрізняється тим, що еластичні балони виконані у вигляді набору кілець тороїдальної форми, співвісно розташованих відносно пневмоциліндра.
Пристрій для автоматичного встановлення та демонтажу інструментів на роботі
Номер патенту: 82321
Опубліковано: 10.04.2008
Автор: Навар Пьєр
МПК: B25J 15/04, B23Q 7/10, B23Q 3/155 ...
Мітки: демонтажу, інструментів, встановлення, автоматичного, пристрій, роботи
Формула / Реферат:
1. Пристрій для автоматичного встановлення та демонтажу інструментів на роботі, який містить засоби для зберігання ряду однакових інструментів і засоби для центрування інструмента в положенні для автоматичного встановлення на роботі, при цьому кожний інструмент містить осьовий отвір для встановлення на обертовому штирі, передбаченому на роботі, засоби для зберігання містять поверхню, яка служить опорою для штабеля інструментів, і засоби для...
Пристрій для керування адаптивним роботом
Номер патенту: 31511
Опубліковано: 10.04.2008
Автори: Марковський Ігор Володимирович, Чернов Сергій Констянтинович, Кондратенко Володимир Юрійович, Кондратенко Галина Володимирівна, Кондратенко Юрій Пантелійович
МПК: B25J 19/02, G05B 19/00
Мітки: керування, пристрій, адаптивним, роботом
Формула / Реферат:
Пристрій для керування адаптивним роботом, що містить захватний орган, дві затискні губки, послідовно з'єднані датчик проковзування, перший підсилювач, диференціатор, пороговий елемент, вихід якого з'єднаний з S-входом першого RS-тригера, R-вхід якого призначений для сприйняття імпульсу запуску, елемент І, перший і другий входи якого з'єднані з виходами тактильних датчиків, встановлених на затискних губках, і приводи стискання губок та...
Спосіб установлювання поверхнево-монтованих компонентів на друковані плати за допомогою вакуумного пінцета
Номер патенту: 31403
Опубліковано: 10.04.2008
Автор: Харибін Олександр Георгійович
МПК: B25J 15/06, B25J 11/00
Мітки: плати, установлювання, друковані, пінцета, вакуумного, поверхнево-монтованих, компонентів, спосіб, допомогою
Формула / Реферат:
1. Спосіб установлювання поверхнево-монтованих компонентів на друковані плати за допомогою вакуумного пінцета, з'єднаного пневмолінією з вакуумним насосом, при проведенні якого поверхнево-монтовані компоненти установлюють на друковані плати в місця їх установки, що частково перекривають попередньо покриті шаром флюсу або паяльної пасти зони пайки цих компонентів на друкованій платі, а на всмоктувальній головці вакуумного пінцета створюють...
Функціональний робочий модуль розпилювання напівтуш худоби
Номер патенту: 31401
Опубліковано: 10.04.2008
Автори: Ощипок Ігор Миколайович, Кравців Роман Йосипович, Занічковська Любов Володимирівна
МПК: B25J 15/00, A22B 7/00
Мітки: модуль, напівтуш, функціональний, розпилювання, робочий, худоби
Формула / Реферат:
1. Функціональний робочий модуль розпилювання напівтуш худоби, що містить захоплювач, привід переміщення захоплювача, затискні губки, осі затискних губок, який відрізняється тим, що він укомплектований додатково маніпулятором, приймальним столом, пилою, опорою, фігурними кліщовинами, іклами, напрямною, прямою і зворотною пружинами, стопором, роликом-тролеєм, боковим пальцем, гідроциліндрами, стояком, інформаційною системою, причому захоплювач...
Датчик робота для реєстрації проковзування деталі
Номер патенту: 30356
Опубліковано: 25.02.2008
Автори: Кондратенко Володимир Юрійович, Шишкін Олександр Сергійович, Чернов Сергій Констянтинович, Кондратенко Юрій Пантелійович, Марковський Ігор Володимирович
МПК: B25J 19/02
Мітки: датчик, деталі, робота, реєстрації, проковзування
Формула / Реферат:
Датчик робота для реєстрації проковзування деталі, що містить корпус, в якому розміщено магнітну систему, до складу якої входить циліндричний ролик, виконаний у вигляді принаймні одного замкнутого тороїдального намагніченого магнітопроводу з нанесеним на твірну поверхню ролика захисним пружним покриттям і з можливістю обертання ролика навколо своєї осі, та закріплений на корпусі магніточутливий елемент, до складу якого входить основний...
Пристрій для установлювання за допомогою пінцета поверхнево-монтованих компонентів на друковані плати
Номер патенту: 30138
Опубліковано: 11.02.2008
Автор: Харибін Олександр Георгійович
МПК: B25J 15/06, B25J 11/00
Мітки: поверхнево-монтованих, плати, компонентів, допомогою, установлювання, пристрій, друковані, пінцета
Формула / Реферат:
1. Пристрій для установлювання за допомогою пінцета поверхнево-монтованих компонентів на друковані плати, що містить принаймні опору для розміщення друкованих плат, подовжній напрямний пристрій, на якому установлена з можливістю примусового переміщення над опорою для розміщення друкованих плат пересувна каретка, що служить опорою для руки оператора, і магазин з поверхнево-монтованими компонентами, який відрізняється тим, що подовжній...
Багатофункціональний кистьовий пристрій робота
Номер патенту: 30067
Опубліковано: 11.02.2008
Автори: Шишкін Олександр Сергійович, Марковський Ігор Володимирович, Кондратенко Володимир Юрійович, Кондратенко Юрій Пантелійович, Чернов Сергій Костянтинович
МПК: B25J 15/00
Мітки: пристрій, кистьовий, багатофункціональний, робота
Формула / Реферат:
Багатофункціональний кистьовий пристрій робота, що містить дві пари захватних органів, основу, корпус, привід захватних органів, кінематично зв'язаний з гвинтовою парою, та перший зовнішній і перший внутрішній порожнинні циліндричні елементи, встановлені коаксіально гвинту гвинтової пари, кожний затискний елемент першої пари захватних органів за допомогою відповідної пари шарнірно закріплених паралельних тяг кінематично зв'язано з гайкою...
Роботизований технологічний комплекс

Номер патенту: 28019
Опубліковано: 26.11.2007
Автори: Проць Ярослав Іванович, Куцевич Арсен Васильович, Савків Володимир Богданович, Куцевич Олександр Арсенович
МПК: B65H 5/08, B25J 19/02, B25J 15/00 ...
Мітки: роботизований, технологічний, комплекс
Датчик для реєстрації проковзування з дискретним вихідним сигналом
Номер патенту: 27722
Опубліковано: 12.11.2007
Автори: Шишкін Олександр Сергійович, Марковський Ігор Володимирович, Кондратенко Володимир Юрійович, Чернов Сергій Констянтинович, Кондратенко Юрій Пантелійович
МПК: B25J 19/02
Мітки: сигналом, датчик, вихідним, дискретним, реєстрації, проковзування
Формула / Реферат:
Датчик для реєстрації проковзування з дискретним вихідним сигналом, що містить реєструвальний елемент, виконаний у вигляді принаймні одного конденсатора, та чутливий елемент, встановлений принаймні на одній з губок захватного пристрою робота, кожна з яких зв'язана із приводом їхнього переміщення, підключеним до блока керування, чутливий елемент виконаний у вигляді стрижня з наконечником, розташованого усередині основного паза конічної форми,...
Адаптивний захватний пристрій інтелектуального робота
Номер патенту: 26252
Опубліковано: 10.09.2007
Автори: Кондратенко Володимир Юрійович, Швець Едуард Анатолійович, Марковський Ігор Володимирович, Шишкін Олександр Сергійович, Кондратенко Юрій Пантелійович, Чернов Сергій Костянтинович
МПК: B25J 15/00
Мітки: адаптивний, захватний, робота, інтелектуального, пристрій
Формула / Реферат:
Адаптивний захватний пристрій інтелектуального робота, що містить кінематично зв'язані з приводом губки, принаймні на одній з яких встановлено перший і другий датчики стискального зусилля, зв'язані з блоком керування приводом губок, у губках з можливістю плоскопаралельного та обертового переміщення встановлені пружно зв'язані з відповідною губкою рухливі елементи, які мають можливість взаємодії з першим датчиком стискального зусилля і другим...
Багатофункціональний кистьовий вузол промислового робота
Номер патенту: 24706
Опубліковано: 10.07.2007
Автори: Кондратенко Юрій Пантелійович, Шишкін Олександр Сергійович, Чернов Сергій Костянтинович, Марковський Ігор Володимирович, Кондратенко Володимир Юрійович
МПК: B25J 15/00
Мітки: багатофункціональний, робота, кистьовий, вузол, промислового
Формула / Реферат:
Багатофункціональний кистьовий пристрій промислового робота, що містить дві пари захватних органів, основу, корпус, привід захватних органів, кінематично з'єднаний з гвинтовою парою, та зовнішній і внутрішній порожнинні циліндричні елементи, встановлені коаксіально гвинту гвинтової пари, кожний затискний елемент першої пари захватних органів за допомогою відповідної пари шарнірно закріплених паралельних тяг кінематично зв'язано з гайкою...
Датчик для реєстрації проковзування предмета
Номер патенту: 24618
Опубліковано: 10.07.2007
Автори: Кондратенко Юрій Пантелійович, Чернов Сергій Костянтинович, Марковський Ігор Володимирович, Кондратенко Володимир Юрійович, Шишкін Олександр Сергійович
МПК: B25J 19/02
Мітки: предмета, реєстрації, датчик, проковзування
Формула / Реферат:
1. Датчик для реєстрації проковзування предмета, що містить корпус, в якому розміщено циліндричний ролик з можливістю повороту навколо своєї осі, магнітну систему на основі постійного магніта та магніточутливий елемент, який відрізняється тим, що ролик виконано у вигляді принаймні одного замкнутого тороїдального намагніченого магнітопроводу, який одночасно виконує роль постійного магніта магнітної системи, на твірну поверхню ролика нанесено...
Багатофункціональний кистьовий пристрій адаптивного робота
Номер патенту: 24270
Опубліковано: 25.06.2007
Автори: Кондратенко Юрій Пантелійович, Швець Едуард Анатолійович, Чернов Сергій Костянтинович, Марковський Ігор Володимирович, Кондратенко Володимир Юрійович
МПК: B25J 15/00
Мітки: багатофункціональний, робота, пристрій, кистьовий, адаптивного
Формула / Реферат:
Багатофункціональний кистьовий пристрій адаптивного робота, що містить дві пари захватних органів, основу, перший компонент головного корпусу, додатковий корпус, в якому закріплено привід захватних органів, кінематично зв'язаний з гвинтовою парою, зовнішній і внутрішній порожнинні циліндричні елементи, встановлені коаксіально гвинту гвинтової пари, та закріплений на основі перший керований фіксатор, виконаний у вигляді електромагніта, рухомий...
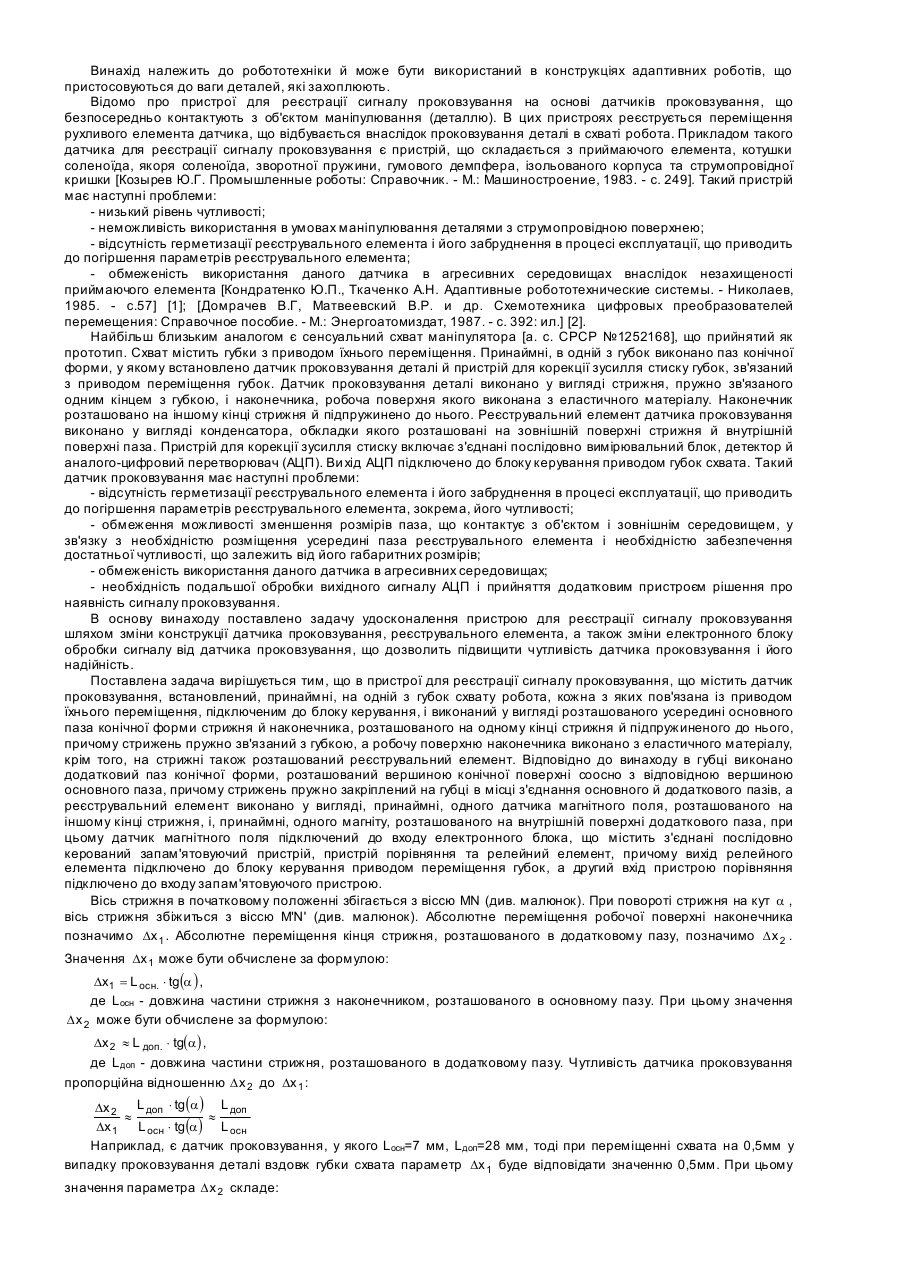
Пристрій для реєстрації сигналу проковзування
Номер патенту: 79155
Опубліковано: 25.05.2007
Автори: Кондратенко Володимир Юрійович, Кондратенко Юрій Пантелійович, Шишкін Олександр Сергійович
МПК: B25J 19/02, B25J 13/08
Мітки: пристрій, реєстрації, сигналу, проковзування
Формула / Реферат:
1. Пристрій для реєстрації сигналу проковзування, що містить датчик проковзування, встановлений принаймні на одній з губок схвата робота, кожна з яких зв'язана із приводом їхнього переміщення, підключеним до блока керування, і виконаний у вигляді розташованого усередині основного паза конічної форми стрижня й наконечника, розташованого на одному кінці стрижня й підпружиненого до нього, причому стрижень пружно зв'язаний з губкою, а робочу...
Багатофункціональний кистьовий пристрій робота

Номер патенту: 18647
Опубліковано: 15.11.2006
Автори: Швець Едуард Анатолійович, Кондратенко Юрій Пантелійович, Кондратенко Володимир Юрійович, Чернов Сергій Костянтинович, Марковський Ігор Володимирович
МПК: B25J 15/00
Мітки: багатофункціональний, кистьовий, пристрій, робота
Формула / Реферат:
Багатофункціональний кистьовий пристрій робота, що містить дві пари захватних органів, основу, головний корпус, привід захватних органів, кінематично зв'язаний з гвинтовою парою, та зовнішній і внутрішній порожнинні циліндричні елементи, встановлені коаксіально гвинту гвинтової пари, кожний захватний елемент першої пари захватних органів за допомогою відповідної пари паралельних тяг кінематично зв'язано з гайкою гвинтової пари, а кожний...
Захоплювач промислового робота
Номер патенту: 18644
Опубліковано: 15.11.2006
Автори: Ткачук Юрій Якович, Марченко Юрій Олексійович
МПК: B25J 15/04
Мітки: захоплювач, робота, промислового
Формула / Реферат:
1. Захоплювач промислового робота, що містить корпус, губки захоплювача, виконані у вигляді встановлених із можливістю поздовжнього переміщення підпружинених елементів із робочою частиною у вигляді загостреної голки, який відрізняється тим, що загострена голка виконана розрізною по міделеву перерізу, при цьому одна з половин голки виконана нерухомою і жорстко скріплена з корпусом перпендикулярно його поверхні, а друга половина - шарнірно...
Двозахватний пристрій промислового робота

Номер патенту: 18720
Опубліковано: 15.11.2006
Автори: Мажара Віталій Анатолійович, Годунко Максим Олегович, Павленко Іван Іванович
МПК: B23Q 3/06, B25J 18/00
Мітки: робота, двозахватний, пристрій, промислового
Формула / Реферат:
1. Двозахватний пристрій промислового робота для одночасного затиску двох деталей, який складається з механізму зміни захватів місцями, фланця, кисті та захватів, який відрізняється тим, що його устатковано гальмівним механізмом, а вісь захвату виконано паралельно осі руки робота.2. Двозахватний пристрій промислового робота за п. 1, який відрізняється тим, що як гальмівний механізм використано гідравлічні демпфери.
Вставка кріостата

Номер патенту: 17466
Опубліковано: 15.09.2006
Автори: Чмуль Анатолій Григорович, Сафронов Віталій Вікторович, Маслов Валентин Олексійович, Жарков Іван Павлович
МПК: B25J 11/00
Формула / Реферат:
1. Вставка кріостата, яка містить кювету і кінематично зв’язаний з кюветою механізм переміщення у вертикальному напрямку у вигляді двох співвісних трубок, виконаних з пружного матеріалу і розташованих одна всередині іншої, при тому що зовнішня трубка з’єднана з виконавчим механізмом переміщення, а внутрішня трубка встановлена з можливістю її вертикального переміщення і з’єднана з кюветою, і механізм обертання кювети у вигляді розташованого...
Вакуумний збірний захват для деталей, що легко деформуються

Номер патенту: 76235
Опубліковано: 17.07.2006
Автори: Пашков Євген Валентинович, Селіхов Ігор Володимирович
МПК: B25J 15/06
Мітки: захват, вакуумний, легко, збірний, деформуються, деталей
Формула / Реферат:
Вакуумний збірний захват для деталей, які легко деформуються, що містить вакуумний присосок і циліндричний корпус з каналами для підключення до вакуум-насоса або ежектора, який відрізняється тим, що присосок забезпечений ущільнювальним комірцем і змонтований з можливістю обертання на корпусі, на одному кінці якого, що знаходиться в порожнині присоска, виконана виточка під підпружинений в осьовому напрямі і зафіксований від обертання плунжер з...
Датчик проковзування адаптивного робота
Номер патенту: 15635
Опубліковано: 17.07.2006
Автори: Крутських Сергій Владиславович, Кондратенко Володимир Юрійович, Кондратенко Юрій Пантелійович
МПК: B25J 19/02
Мітки: робота, адаптивного, проковзування, датчик
Формула / Реферат:
Датчик проковзування адаптивного робота, що містить корпус, в якому встановлено чутливий елемент, виконаний у вигляді циліндричного ролика з можливістю повороту навколо своєї осі, робоча поверхня якого виконана з еластичного матеріалу, і систему реєстрації сигналу проковзування, який відрізняється тим, що система реєстрації сигналу проковзування виконана у вигляді двосекційного конденсатора, дві нерухомі обкладки якого через діелектрик...
Крокуючий рушій малогабаритного робота

Номер патенту: 75991
Опубліковано: 15.06.2006
Автори: Шевченко Анатолій Іванович, Полівцев Сергій Олександрович
МПК: B62D 57/00, B25J 11/00
Мітки: малогабаритного, робота, крокуючий, рушій
Формула / Реферат:
1. Крокуючий рушій малогабаритного робота, що містить корпус, у якому розташовані рівнобіжні привідні осі, крокуючі стопи, що розташовані на протилежних боках корпуса, який відрізняється тим, що у нього введені перший електродвигун, на валу якого розташований перший редуктор, на виході якого установлена ведуча шестірня, сполучена з веденими шестернями, жорстко з'єднаними з привідними рівнобіжними осями, на кінцях яких розташовані кривошипи,...
Адаптивний захватний пристрій інтелектуального робота

Номер патенту: 14569
Опубліковано: 15.05.2006
Автори: Швець Едуард Анатолійович, Кондратенко Юрій Пантелійович
МПК: B25J 15/00
Мітки: захватний, адаптивний, інтелектуального, робота, пристрій
Формула / Реферат:
Адаптивний захватний пристрій інтелектуального робота, що містить кінематично зв'язані з приводом губки, принаймні на одній з яких встановлено перший і другий датчики стискального зусилля, зв'язані з блоком керування приводом губок, інтерфейс якого містить чотири входи і чотири виходи, у губках виконані напрямні пази, у яких з можливістю переміщення встановлені пружно зв'язані з відповідною губкою рухливі елементи, які мають можливість...
Пристрій для реєстрації сигналу проковзування
Номер патенту: 14566
Опубліковано: 15.05.2006
Автори: Кондратенко Володимир Юрійович, Шишкін Олександр Сергійович, Кондратенко Юрій Пантелійович
МПК: B25J 19/02
Мітки: сигналу, пристрій, проковзування, реєстрації
Формула / Реферат:
Пристрій для реєстрації сигналу проковзування, що містить датчик проковзування, встановлений принаймні на одній з губок кліщів робота, кожна з яких зв'язана із приводом їх переміщення, підключеним до блока керування, і виконаний у вигляді ролика з інформаційними елементами, розташованими паралельно осі обертання ролика, джерела і приймача світла, зв'язаних з блоком керування, який відрізняється тим, що датчик проковзування оснащений...
Модуль маніпулятора
Номер патенту: 75033
Опубліковано: 15.03.2006
Автори: Копп Вадим Якович, Бондарєва Наталя Анатоліївна, Круговой Олександр Миколайович, Балакін Олексій Ігоревич
МПК: B25J 9/00
Мітки: маніпулятора, модуль
Формула / Реферат:
Модуль маніпулятора, який містить перший та другий стержні, що розташовані у нерухомій напрямній, пневмоциліндр, шток якого встановлений з можливістю зворотно – поступального руху та жорстко зв’язаний з першим стержнем через рухому напрямну, пружний елемент, жорстко зв’язаний з першим та другим стержнями, та також обладнаний електропневмоперетворювачами, зв’язаними з гальмівними головками і датчиком зворотного зв'язку, який відрізняється...
Модуль маніпулятора
Номер патенту: 75032
Опубліковано: 15.03.2006
Автори: Копп Вадим Якович, Круговой Олександр Миколайович, Бондарєва Наталя Анатоліївна, Балакін Олексій Ігоревич
МПК: B25J 9/00
Мітки: модуль, маніпулятора
Формула / Реферат:
Модуль маніпулятора, який містить пневмопривід, зв'язаний з пружним елементом, та гальмівні головки, кінематично зв’язані з електропневмоперетворювачами, який відрізняється тим, що пневмопривід виконаний у вигляді моментного циліндра, шток якого має можливість повороту і жорстко з’єднаний з пружним елементом, який має форму східчастого вала, причому гальмівні головки виконані у вигляді різноплечих клемних затискачів з можливістю фіксації...
Маніпулятор
Номер патенту: 9564
Опубліковано: 17.10.2005
Автори: Табацков Вячеслав Петрович, Бергер Еміль Григорович, Бергер Євгеній Емильович, Іванов Геннадій Олександрович
МПК: B25J 11/00
Мітки: маніпулятор
Формула / Реферат:
Маніпулятор, який має основу з силовим циліндром та захоплювач руки робота, який відрізняється тим, що він обладнаний кривошипно-шатунним механізмом, ланки якого шарнірно закріплені до штока корпусу силового циліндра кулісою, яка оснащена розмічальними штифтами.
Спосіб контролю співвісності отворів в решітках ємкості та пристрій для його здіснення
Номер патенту: 73764
Опубліковано: 15.09.2005
Автори: Распутько Олексій Степанович, Лісовенко Іван Степанович, Левун Микола Олександрович, Пирогов Олександр Дмитрович, Рябець Микола Пантелеймонович, Галенко Василь Петрович
Мітки: отворів, пристрій, ємкості, контролю, здіснення, співвісності, спосіб, решітках
Формула / Реферат:
1. Спосіб контролю співвісності отворів в решітках ємкості, який включає переміщення маніпулятора з підвищеним калібром в зону контролю отворів, установлення ємкості на поворотний стіл і опускання калібра в отвори решіток з наступним підніманням його з отворів, який відрізняється тим, що підвішений калібр оснащують датчиком контролю зусилля і виставляють по базовій осі, а ємкість установлюють з корекцією базового отвору по калібру так, щоб...
Схват маніпулятора

Номер патенту: 7281
Опубліковано: 15.06.2005
Автори: Савенко Юрій Миколайович, Роуланд Марк Стефан, Карпачов Юрій Андрійович, Захаренко Анатолій Олександрович, Сміт Крейг Ф.
МПК: B25J 15/00
Мітки: схват, маніпулятора
Формула / Реферат:
1. Схват маніпулятора, що містить корпус, привід переміщення охвата, привід обертання схвата і затискні губки, кінематично зв'язані з приводами, який відрізняється тим, що додатково він споряджений додатковими затискними губками, виконаними пружними, як і основні затискні губки, і в нижній частині жорстко зчленованими з ними, причому привід переміщення схвата сполучений з черв'яком, який знаходиться в зачепленні з двома черв'ячними секторами,...
Дистанційно-керований транспортний засіб з багатоцільовим маніпулятором
Номер патенту: 6160
Опубліковано: 15.04.2005
Автори: Карпачов Юрій Андрійович, Роуланд Марк Стефан, Сміт Крейг Ф., Захаренко Анатолій Олександрович, Савенко Юрій Миколайович
МПК: B25J 5/00, B62D 57/00
Мітки: дистанційно-керований, транспортний, багатоцільовим, засіб, маніпулятором
Формула / Реферат:
1. Дистанційно-керований транспортний засіб, що містить корпус і установлені на його бічних стінках передні і задні колісні рушії, причому кожний з передніх рушіїв оснащено коромислом з розташованими на його кінцях ходовими колесами, коромисла виконані хитними відносно корпусу і через електромагнітні муфти з'єднані одне з одним за допомогою передньої горизонтальної траверси з можливістю повороту коліс навколо неї, а траверса жорстко зв'язана...
Захватний пристрій

Номер патенту: 72799
Опубліковано: 15.04.2005
Автори: Гліха Віктор, Клаппер Манфред
МПК: B25J 1/00, G21C 19/02, G21C 19/00 ...
Формула / Реферат:
1. Захватний пристрій (1) для маніпулювання розміщеними в обробному приміщенні (2) компонентами із операторського приміщення (4), відокремленого від обробного приміщення (2) перегородкою (6), який містить пропущений крізь перегородку (6) порожнистий вал (8), на розміщеному в обробному приміщенні (2) кінці (12) якого встановлений керований тягою (16) захват (14), причому тяга (16) пропущена всередині порожнистого вала (8) і зв'язана з органом...
Промисловий робот
Номер патенту: 67181
Опубліковано: 15.06.2004
Автори: Бергер Еміль Григорович, Бергер Євгеній Емильович, Осадчий Володимир Степанович
МПК: B25J 11/00
Мітки: промисловий, робот
Формула / Реферат:
Промисловий робот, що містить опору, вертикальну і горизонтальну каретки, механічну руку із схватом, виконану у вигляді куліси, і гвинтову пару, гайка якої зв'язана з горизонтальною кареткою, який відрізняється тим, що він обладнаний зв'язаною з горизонтальною кареткою і встановленою в поворотному камені кулісою з профільованим кулачком, який зв'язаний за допомогою штовхача з вертикальною кареткою, при цьому поворотний камінь на важелі, схват...
Спосіб одержання метану з біогазу
Номер патенту: 38746
Опубліковано: 15.04.2004
Автори: Хажмурадов Манап Ахмадович, Григорова Тетяна Костянтинівна, Колобродов Віктор Георгійович, Карнацевич Леонід Владиславович
МПК: B25J 3/00, B01D 53/00, B01D 57/00 ...
Мітки: одержання, біогазу, спосіб, метану
Формула / Реферат:
Спосіб одержання метану з біогазу, який включає конденсування біогазу у тверду фазу при низьких температурах, відігрівання сконденсованого біогазу та відбирання метану під час відігрівання до температури меншої, ніж температура плавлення діоксиду вуглецю, який відрізняється тим, що конденсування біогазу ведуть при зниженні температури до температури плавлення метану, а відбирання метану проводять при відігріванні від температури...
Механізм дистанційного керування
Номер патенту: 65083
Опубліковано: 15.03.2004
Автори: Гусев Олексій Володимирович, Березнюк Володимир Володимирович, Рудик Юрій Микитович, Карпачов Юрій Андрійович
МПК: B25J 19/00, G05G 9/00
Мітки: керування, механізм, дистанційного
Формула / Реферат:
1. Механізм дистанційного керування, що містить корпус, розташовану в ньому кульову опору, робочий орган і дві дуги з пазами, установлені поворотно на взаємно перпендикулярних півосях, розміщених у корпусі, який відрізняється тим, що він обладнаний автоматизованими приводами для відпрацьовування по заданій програмі координат положення робочого органа в просторі, останній виконаний у вигляді стакана з хвостовиком і встановлений у кульовій...
Оброблювальний центр
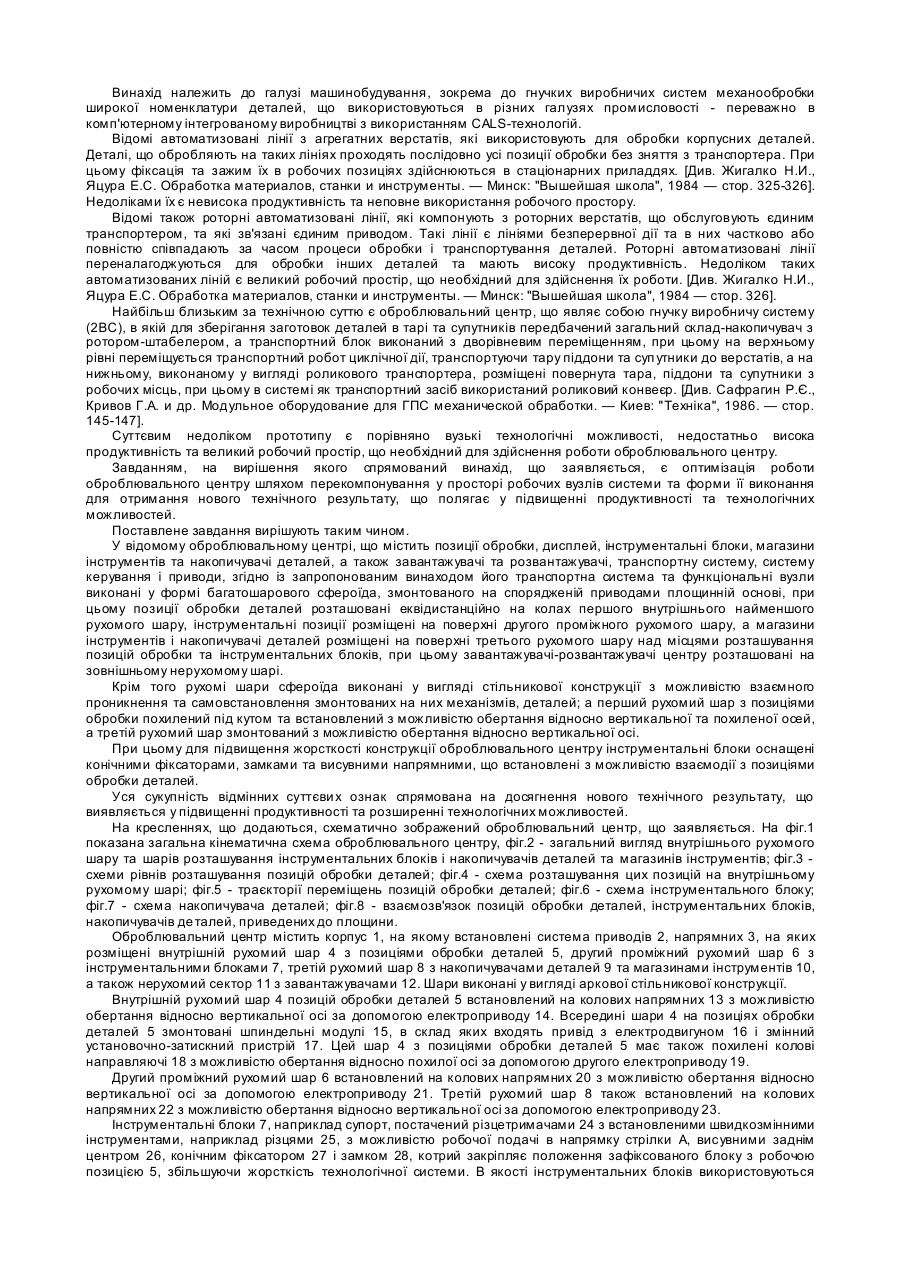
Номер патенту: 63128
Опубліковано: 15.01.2004
Автори: Григор'єва Наталія Сергіївна, Шабайкович Віктор Антонович, Марчук Віктор Іванович
МПК: B25J 9/00
Мітки: центр, оброблювальний
Формула / Реферат:
1. Оброблювальний центр, що містить позиції обробки деталей, інструментальні блоки, магазини інструментів і накопичувачі деталей, завантажувачі, транспортну систему, систему керування і приводи, який відрізняється тим, що його транспортна система та функціональні вузли виконані у формі багатошарового сфероїда, змонтованого на обладнаній приводами площинній основі, при цьому позиції обробки деталей розташовані еквідистантно по колах першого...